facial verification using a modular kernel eigen spaces
advertisement

Proceedings of the International Conference , “Computational Systems and Communication Technology”
8th , MAY 2010 - by Cape Institute of Technology,
Tirunelveli Dt-Tamil Nadu,PIN-627 114,INDIA
FACIAL VERIFICATION USING A MODULAR KERNEL EIGEN SPACES
1
Golda Jude P, 2Dr. K. Muneeswaran
1
PG student 2Professor & Head
Department of Computer science and Engineering
Mepco schlenk engineering college
Sivakasi, virudhunagar-626005
goldjude@gmail.com
Abstract- In this paper face recognition accuracy is
improved by developing a new kernel Eigen space and
implemented on the phase congruency image extracted
from the visual image. Smaller sub-regions in a
predefined neighborhood within the phase congruency
images of the training samples are merged to obtain a
large set of features. These features are then projected
into higher dimensional spaces using kernel methods.
The proposed method helps to overcome the
illumination, expression variations. ORL database is
used for the experiment.
In order to capture the relationships among more than
two pixels, the data is projected into nonlinear higher
dimensional spaces using the kernel method.
The paper is organized as follows. A step to
obtain the phase congruency image is explained in
section 2. Modularization is explained in section 3. The
process of obtaining modular kernel Eigen features is
explained in Section 4. Architectural design is explained
in section 5. Experimental result in section 6 followed
by conclusion in 6.
2. PHASE CONGRUENCY
Keywords-kernel,phasecongruency,Feature
extraction
1. INTRODUCTION
Face Recognition is a biometric identification by
scanning a person's face and matching it against a library
of known faces. A healthy human can detect a face
easily and identify that face, whereas for a computer to
recognize faces, the face area should be detected and
recognition comes next. Hence for a computer to
recognize faces the photographs should be taken in a
controlled environment. The prime application of face
recognition is to identify the individuals for the purpose
of security.
Even though face recognition technology [2] has
moved from linear subspace methods [2] such as Eigen
and Fisher faces [4], [5] to nonlinear methods namely
kernel principal component analysis (KPCA) and kernel
Fischer discriminate analysis (KFDA) [6]–[7], many of
the problems are yet to be addressed. The feature
selection process presented in this paper is derived from
the concept of modular spaces [10]. The face images that
affected due to variations such as non uniform
illumination, expressions and partial occlusions are
confined mostly to local regions. Modularizing the
images would help to localize these variations, provided
the modules created are sufficiently
small.
Linear subspace approaches such as PCA does not
capture the relationship among more than two variables.
Phase congruency is a method of edge detection
that is particularly robust against changes in illumination
and contrast. The concept is similar to coherence except
that it applies to functions of different wavelength. For
example, the Fourier decomposition of a square wave
consists of sine functions, whose frequencies are odd
multiples of the fundamental frequency. At the rising
edges of the square wave, each sinusoidal component
has a rising phase; the phases have maximal congruency
at the edges. This corresponds to the human-perceived
edges in an image where there are sharp changes
between light and dark.
A . Steps for calculating phase congruency image
Convolve the face image I(x,y) with a bank of 2-D log
Gabor filter with different orientations and scales. The
2-D log Gabor is constructed using a Gaussian function
in the angular direction which is given by
G( ) e( ( 0 )
2
) /( 2 02 )
(1)
6 orientations and 3 scales are chosen. 0 is the
orientation of the filter and is the standard deviation
of the Gaussian function.
The log Gabor has a transfer function of the form
G(w) e ( log(w / wo )
2
) /(2(log(k / wo ) 2 ))
(2)
Proceedings of the International Conference , “Computational Systems and Communication Technology”
8th , MAY 2010 - by Cape Institute of Technology,
Tirunelveli Dt-Tamil Nadu,PIN-627 114,INDIA
The amplitude of the response at a given scale and
orientation is computed by
Ano
eno ( x, y) 2 ono ( x, y) 2
(3)
The phase congruency of the image calculated over
various scales and orientation is calculated by
PC ( x, y )
o ( n eno ( x, y )) 2 ( n ono ( x, y )) 2 (4)
o n Ano ( x, y )
Where represents the even and odd components at a
scale n and orientation o
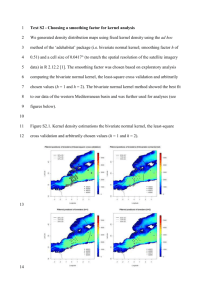
Fig. 1. Original image
fig. 2. Phase congruency image obtained
from the original image
3. MODULARIZATION
Several experimental results show that with module
sizes of 4 X4, 8X 8, and 16X 16 on face images of size
64 X64. It has been observed in [9] that, maximum
recognition accuracy is obtained when the images were
divided into sub-regions of size 8X8.Larger module size
(16X16) leads to lesser localization of the facial
variations and smaller module size (4 X4) misses the
sub-region information content. This leads to the
conclusion that the sub-regions in the modular approach
needs to occupy specific facial feature information.
Hence, in the proposed neighborhood defined modular
space approach, several 8X8 modules are created by
combining 4X 8 modules in a neighborhood region of
size 16X 16 for a 64X64 face image. As a result 448
modules are created[1] and then each module is
projected to the Eigen spaces and then it is classified
according to the minimum distance measure.
A.General steps for proposed modularization for
NXN image size
1. Each image is divided into ( N / n) ( N / n) to get
n n
to get number of large modules.
2. Each module of size ( N / n) ( N / n) is then divided
into modules of size ( N / n i ) ( N / n j ) , where
i j is the number of small modules within a modules.
3 .P modules can then be created by merging
i j number of
small modules in a neighborhood according to the
relation P ((i j )!) / k!(i j k )!) , where k is the
number of small modules to merge.
4. OBTAINING MODULAR KERNEL EIGEN
FEATURES
Kernel PCA has been applied to face
recognition applications and is observed to be able to
extract nonlinear features. The process of obtaining the
weights for the input patterns in the kernel principal
component analysis transformed space is described
below.
Let x i be the vectors belonging to the training
sample set X {xi , x2 , x3 ....xn } where x i R n and
‘c’ be the number of classes in the training set. Mean of
the data mo is given by
mo
1 m
xk 0
m k 1
(5)
Let Φ be the mapping between the input space X and the
feature space
Φ: X->H, H can be assumed to be a Hilbert space
Covariance matrix C is calculated as
C V V
(6)
The relationship between the eigenvector and the sample
training vector in feature space is
m
V i ( xi )
i 1
The projection of the sample vector
vector is given by
(7)
onto the Eigen
Proceedings of the International Conference , “Computational Systems and Communication Technology”
8th , MAY 2010 - by Cape Institute of Technology,
Tirunelveli Dt-Tamil Nadu,PIN-627 114,INDIA
V . ( xk )
m
i 1
i
k ( xi ,xk )
Voting
(8)
5. ARCHITECTURAL DESIGN
Result
A. Steps in training image
1. Obtain the phase congruency maps for each
image
of the training set .
2. Modularize each of the training images.
3. Create and process each set of modules
separately.
4. Generate the kernel matrix for each
vectorized module set after an appropriate
kernel is selected.
5. Apply KPCA for each module set and obtain
the weights for all the individual modules.
B. steps in test image
1. Extract the phase congruency features of the test
image.
2. Create the modular regions.
3. Obtain the weights for each individual module using
the vectorized modules and the Kernel matrix
4. Classify each module by using a minimum distance
classifier on the generated weights from the training and
the testing phase.
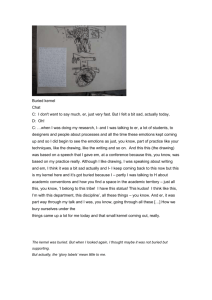
Fig.3. Face recognition technique for training image
6.RESULTS
For experiment purpose ORL database is used.
There are 40 individuals. There are 10 images per
individual in the ORL database with 40 images.
Different tests are conducted, such as changing the
training and test images used for each individual and
using less or more number of training and test images in
order to test the systems reaction to these changes.
A .Neighborhood Defined Modular phase
congruency Based Kernel PCA (NMPKPCA)
The modules created are projected to higher
dimensional spaces using kernel spaces. Table 1 shows
the recognition rate obtained for the different test and
train images. The train and test images are disjoint.
Table 1 shows 80,160,180 train images with 2,4,6
images per individual are trained respectively. ORL
database is used for the experiment to test and train the
different images. Similarly 40,80,120 test images with
1,2,3 images per individual are tested respectively.
TABLE 1
Phase congruency feature extraction
RECOGNITION RATE FOR DIFFERENT TEST AND TRAIN IMAGES
Extraction of modules and projection into Eigen
subspaces
Nearest neighbor classification of modules
No of test
images
No of
train
images
Recognized
image
Not
Recognized
image
Recognition
Rate in %
40
80
35
5
87.5
80
160
75
5
93.6
120
180
112
8
95
Proceedings of the International Conference , “Computational Systems and Communication Technology”
8th , MAY 2010 - by Cape Institute of Technology,
Tirunelveli Dt-Tamil Nadu,PIN-627 114,INDIA
7. CONCLUSION AND FUTURE WORK
This paper presents a face recognition technique
using visual face images. The feature selection is robust
to the variations that occur in the face images captured
in visual. The novel modular kernel Eigen spaces
approach has been able to provide high recognition
accuracy in images affected due to partial occlusions,
expressions and nonlinear lighting variations. Steps are
by taken to test various combination of training and
testing image.
REFERENCES
[1] Satyanadh gundimada and Vijayan K. Asari,”Face Recognition using
multisensory images based on localized kernel eigen spaces” IEEE
transactions on image processing, vol.18,No.6 june 2009
[2] W. Zhao, R. Chellappa, and A. Rosenfeld, “Face recognition: A literature
survey,” ACM Comput. Surv., vol. 35, pp. 399–458, 2003.
[3] P. N. Belhumeur, J. P. Hespanha, and D. J. Kriegman, “Eigenfaces
vs.Fisherfaces: Recognition using class specific linear projection,” IEEE
Trans. Pattern Anal. Mach. Intell., vol. 19, pp. 711–720, 1997.
[4] M. Turk and A. Pentland, “Eigenfaces for recognition,” J. Cogn.
Neurosci., vol. 3, no. 1, pp. 71–86, 1991.
[5] A. Pentland, B. Moghaddam, and T. Starner, “View-based and modular
eigenspaces for face recognition,” in Proc. IEEE Conf. Computer Vision and
Pattern Recognition, 1994, pp. 84–91.
[6] J. Huang, P. C. Yuen, W. S. Chen, and J. H. Lai, “Kernel subspace LDA
with optimized Kernel parameters on face recognition,” in Proc. IEEE Int.
Conf. Automatic Face and Gesture Recognition, 2004, pp. 327–332.
[7] M. H. Yang, N. Ahuja, and D. Kriegman, “Face recognition using kernel
eigenfaces,” Adv. NIPS, vol. 14, pp. 215–220, 2002.
[8] M. H.Yang, “Kernel eigenfaces vs. kernel fisherfaces: Face recognition
using kernel methods,” presented at the IEEE Conf. Automatic Face and
Gesture Recognition, 2002.
[9] J. Yang, Z. Jin, J. Y. Yang, D. Zhang, and A. F. Frangi, “Essence of
kernel fisher discriminant: KPCA plus LDA,” Pattern Recognition., vol.10,
pp. 2097–2100, 2004.
[10] R. Gottumukkal and K. V. Asari, “An improved face recognition
technique based on modular PCA approach,” Pattern Recognition. Lett., vol.
25,pp.429–436,2004
Proceedings of the International Conference , “Computational Systems and Communication Technology”
8th , MAY 2010 - by Cape Institute of Technology,
Tirunelveli Dt-Tamil Nadu,PIN-627 114,INDIA