Predator-prey resources: Questions
advertisement

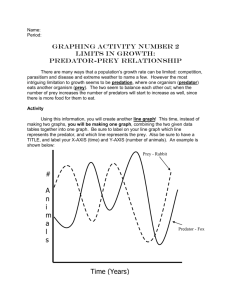
Animal Kinematics & Dynamics: Pursuit of Prey and Locomoting Listeria Peter Love and Suzanne Amador Kane, Physics Department, Haverford College © 2011 Introduction For simplicity, in introductory physics we often solve kinematics problems in which either velocity or acceleration is constant in time. However, in the real world there are relatively few instances of constant velocity or acceleration for long periods of time. No real vehicle, for example, can accelerate indefinitely. In this lab we will investigate two examples in which velocity and acceleration vary with time. The first example is the interaction of predators and prey, and the second is the motion of Listeria bacteria. In the first case drag forces create a scenario where accelerations are limited to extremely short times. In the second case accelerations vary periodically. We will investigate both these cases using numerical modeling – you will use a computer program to investigate models of complicated motion. Computers can approximately solve very complicated problems in Newtonian mechanics in which the forces (and hence accelerations) are changing as a function of time. They do this by using techniques which reduce a problem with complicated forces varying with time into a sequence of problems in which the forces are constant. To understand what the computer is doing, you only need to understand how to solve the constant force and constant acceleration problems which you are assigned in your problem sets. All the computer does is to solve hundreds or thousands (or millions or billions in the case of very large simulations) of these problems one after the other. In the simulations you will run in this lab you will always see a parameter called dt in the code. Of course, this is not like the dt’s one writes down in calculus class – it’s an actual small interval of time. The computer treats the force, which is varying with time, as constant in time for the interval dt, and solves a constant force problem to advance the system from time t to time t+dt. This is called one timestep. Then the computer does this again. And again. And again. Computer simulation is often like this, reducing an insoluble problem into a sequence of solvable problems and letting the computer go. Remember, computers are not intelligent, so they can never solve problems in the way that you can. They can only be told to do very simple things, and then do very many of them very fast. However, this gives us tremendous power to investigate the properties of models where we cannot solve the equations analytically. However, it is very important to remember that a computer simulation is theoretical – it can only tell us about a model of the real world, unlike experiments which probe reality directly. The results of simulations must always be compared to experimental results to validate them. 2/12/16 Predator/Prey questions Predator-prey preamble We call exact solutions for position r(t), velocity v(t) and acceleration a(t) analytical solutions. Most of the time you cannot find such analytical solutions, and you need to measure them or use a computer to obtain approximate solutions numerically. However, there is one case of animal motion that can be usefully analyzed using a relatively simple analytical model-- the case when: (1) This equation describes the case where there are two forces on an object of mass m. The first, Fo, is a constant, positive force provided by the muscles of a moving animal. The second force, -Bv, is a force proportional to the velocity but opposite in direction; B is a constant that depends upon details of the objects shape and the medium through which it moves. Drag is one example of such a force. We can also write down the corresponding velocity as a function of time, v(t), for this equation. (2) This equation describes the motion of objects subject to a drag and is an approximation to the equation of motion for a running animal. Today, we will apply it to the case of pursuit of a prey by a predator. In that case, the animal typically starts with zero initial velocity, undergoes a period of rapid acceleration, then decreases its acceleration as time increases due to a combination of drag and muscle exhaustion, reaching a final top speed which it can maintain for a certain period of time. We can summarize all this using the plot in Fig. 1, which show just such behavior measured from videos of African lions pursuing fleeing Thompson’s gazelles [1]. Figure 1: From Elliot et al. (1977) reproduced from Ref [1] 2 Predator/Prey questions 3 Predator/Prey questions Learning about Listeria Listeria monocytogenes is a short rod-like bacterium which is responsible for the rare but dangerous food borne disease Listeriosis, which can have a fatality rate of up to 25%. These organisms move themselves around in cells by inducing a chemical reaction called polymerization in a protein called Actin. This reaction is induced by chemicals attached to the surface of the bacterium and so occurs at one end of the bacterium. The reaction leaves a ``comet trail’’ of polymerized actin behind the Listeria, which can be observed using a microscope as shown in Figure 2. Figure 2: Listeria motion imaged using phase-contrast microcopy. The scale bars correspond to 5 μm. The shapes of trajectories are: (a) small-amplitude sine, (b) ”S”-curve or large-amplitude sine, (c) serpentine, (d) translating figure”8”, (e) figure-”8”, (f) spiral, (g) circle and (h) straight-line. Reproduced from [2] The data shown in Figure 2 presents us with a problem similar to that faced by Isaac Newton when trying to explain the trajectory data for planets obtained by Tycho Brahe’s careful observations. Proceeding from his three laws of motion and his law of universal gravitation, Newton was able to explain the shapes of the trajectories (orbits) followed by bodies in the solar system. In the second part of the lab you will numerically investigate a simple model for the propulsion of Listeria to see if it can really explain all the shapes of the trajectories shown in Figure 2. Figure 3: The listeria bacterium is the green ellipse, and we will only consider motion in two dimensions. The force on the bacterium is applied at a particular spot at one end marked by the cross in the insert. This is a distance d from the long axis of the bacterium. The long axis makes an angle θ with the x axis. The bacterium rotates around its long axis with an angular frequency ω so that ψ= ωt. The combination of the fact that the force is offset from the long axis and the bacterium is rotating can produce complicated trajectories. 4 Predator/Prey questions Visual Python Prelab Exercise: “Thornton Vaseltarp’s first visual python graph” Run this program on any of the computers in H204, the KINSC computer lab more or less directly above the introductory lab where we meet. You must follow theses instructions carefully 1. Download the python program. Go to Blackboard and download the file Prelab.py by right clicking on it and using “Save file as”. In H204 you cannot save files to the Desktop – save it in Student/Documents folder so you can find it later. 2. Open VIDLE. Go to Start -> All Programs-> Academic Programs ->VIDLE for Vpython and open VIDLE. You get a window called “Untitled” with a menu bar across the top with “File”, “Edit”, “Format”, “Run”, “Options”, “Windows”, “Help” 3. Open the python program in VIDLE. In this new VIDLE window go to “File > Open” in the VIDLE menu and navigate to the file Prelab.py It is easiest to click on Desktop, then got to the folder Student, then to Documents (or wherever you saved this program from Blackboard in step 1). When the file is open you should see a bunch of red text in the vpython window, the first few lines of which are: #Visual Python Prelab Exercise September 24 2009 # # Thornton Vaseltarps first visual python graph 4. Run the python program. In the VIDLE menu go to Run -> Run Module to run the program You should see a window with a plot in labelled ``Thornton Vaseltarp's first vpython graph'' 5. Modify the graph. Now read through the program text which appears in the VIDLE window and change the variable graphtitle so that Thornton Vaseltarp is replaced by your name - make sure you leave the quote marks " " alone. Change the value of the variable named parameter to any number between 4 and 10 Now run the program again and you will see a window labeled with your name, and a slightly different graph. 6. Print the graph Click on this window and press Alt-PrintScreen together to perform a screengrab of the window (that it, the computer makes a copy of your window that you can later paste into another application). Open a blank Microsoft word document and hit Ctrl-V to paste your screengrab into the document. Adjust the size of the image in Word so it fits on the page. Print out your graph and bring it to lab with you. 5 Predator/Prey questions Laboratory Exercise 1: Pursuit of Prey Download the file Exercise1.py from Blackboard. Open VIDLE (“VIDLE for Python”--it’s an icon on your computer’s desktop) now and open the file “Exercise1.py “) (go to File menu, then Open… and select “Exercise1.py”) To run it, go to the Run menu and select Run Module. You ought to get a display showing a little animation. The red sphere stands in for the fleeing gazelle, while the yellow sphere stands in for the pursuing lion. Red and yellow lines show their pathways. After the animation has ended, you get a graph of velocity vs. time and position vs time. Elliot et al. (1977) describe two types of typical hunting behavior by the African lion [1]. In case 1, “crouching stalks”, the lion approaches the prey and tries to get as close as possible, sometimes using cover. Since this entails creeping slowly and pausing frequently, it attacks starting from zero velocity. In Case 2: “running stalks”, the lion is trotting at constant speed before attacking. We will consider only crouching stalks in this lab. Use your Vpython simulations to answer the following questions. In each case, use the program to produce a graph exactly as you did for the prelab. You can print out and write on your graph to illustrate the answers you give on the report form. Remember to write in complete sentences and be clear about which graph you are referring to. 1. Produce plots of velocity vs time (like figure 1) and position vs time for the three types of prey, Gazelle, Zebra and Wildebeast. Run the program Exercise1.py three times setting the variable preyanimal = 1, then 2 then 3 (Gazelle, Zebra, Wildebeast). Set prey_reaction_time=0.0 and lion_ambush_distance=7 for these plots. Print the plots and indicate on them when (if ever) the lion catches the prey, and when (if it does not) the lion should give up the chase. 2. The program has two parameters, gazelle_reaction_time and lion_ambush_distance. The gazelle_reaction_time parameter allows the gazelle to pause for a time after the lion begins to run before itself starting to run away. The lion_ambush_distance parameter sets how close the lion can get before attacking. Vary these two parameters over a reasonable range and make a table showing when the lion catches the gazelle and when it does not. What is the closest distance beyond which the gazelle cannot escape capture for a reaction time of 0.5 seconds? 6 Predator/Prey questions Laboratory exercise 2: Listeria locomotion Download the file Exercise2.py from Blackboard. Open VIDLE (“VIDLE for Python”--it’s an icon on your computer’s desktop) now and open the file “Exercise2.py “) (go to File menu, then Open… and select “Exercise2.py”) To run it, go to the Run menu and select Run Module. You ought to get a display showing an animation of 2D motion. The cone represents the listeria bacterium and the red line represents the Actin comet trail which it leaves behind and which is shown in Figure 1. While the motion that we model here is confined to two dimensions, you can rotate and zoom your view of the trajectory using the mouse. Click the right button of the mouse and move the mouse to rotate your view. Press both the left and the right button together and move the mouse to zoom in and out. In this model there is just one parameter that determines the shape of the trajectory. This parameter is called wOmega in the program and is initially set to 1.0. Vary this parameter and see if you can produce all the types of trajectories shown in Figure 1. For each type of trajectory you produce, print out a graph showing the trajectory. Write on your printout which of the types of trajectory you think this is from the set identified in Figure 2. Footnotes and further reading Getting started with Vpython There is an introduction at: http://vpython.org/ , in particular: http://vpython.org/contents/doc.html Listeria motion: Also see Juliet Theriot’s website for more on listeria locomotion: http://cmgm.stanford.edu/theriot/movies.htm References [1] J. P. Elliot Cowan, I.M., and Holling, C.S. "Prey capture by the African lion" Canadian Journal of Zoology vol. 55(11)pp 1811-28 (1977; Also see: J. P. Elliot, Lions of the Serengeti [2]``A kinematic description of the trajectories of Listeria monocytogenes propelled by Actin comet trails’’, V. B. Shenoy, D. T. Tambe, A. Prasad, J. A. , Proceedings of the National Academy of Sciences, vol. 104 (20), pp.8229-8234 (2007). 7