AIAA-99-2124
AN EXTENDED ANALYTICAL MODEL FOR COMPRESSOR ROTATING STALL AND SURGE
*
†
Nikos Markopoulos, Yedidia Neumeier, J. V. R. Prasad,‡ and Ben T. Zinn§
School of Aerospace Engineering
Georgia Institute of Technology, Atlanta, GA 30332-0150
Abstract
We present a detailed theory for the perturbation dynamics
of an axial compressor. The working fluid is approximated as
incompressible and inviscid. The compressor is modeled as two
adjacent cylindrical ducts of finite length and infinitesimal
thickness, with the rotor and stator blade rows located between
them. The flow in the inlet duct only is assumed to be
irrotational. For our analysis we use a Fourier series expansion of
the periodic dynamical variables along the circumference and
solve explicitly for the coefficients. The resulting model is based
on the first mode approximation only and incorporates the
nonlinear compressor map. The primary feature of our model is
the explicit examination of a generic boundary condition imposed
at the entrance to the inlet duct. Our model depicts qualitative and
quantitative differences with the well-known Moore-Greitzer
model. The latter is valid under the same modeling but assumes
infinite inlet and outlet ducts. Our primary conclusion is that if
the inlet duct is finite, what happens there may have an effect that
slightly hastens or delays the settling of the rotating stall and
surge before or beyond the peak of the compressor map. This
implies practical questions for the design of an inlet. Apart from
that, the rotating stall speed predicted by our model is not
constant in time but, just like the rotating stall amplitude, it goes
through a transient only after which it settles down to a constant
value. Finally, our analysis shows explicitly that the flow field at
the outlet duct is driven by the flow field at the inlet duct and has
no direct dynamical effect on the settling and evolution of the
instabilities.
x
y
t
R
UR
L
m
li
le
lc
lb
A
U
V
P
PT
PS
*
†
‡
§
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
Partial Nomenclature
axial coordinate
circumferential coordinate
time
radius of compressor annulus
density
blade rotational speed at radius R
rotor length
(rotor length + stator length)/rotor length
inlet duct length
outlet duct length
Moore Greitzer constant in Eq. (1) = (li+mL+le)
A second Moore-Greitzer constant, Eq. (2)
Rotating stall amplitude
Rotating stall phase
Compressor map function
circumferentially averaged axial velocity
circumferentially averaged circumferential velocity
circumferentially averaged static pressure
Stagnation pressure upstream of compressor
Plenum static pressure
Z = generic representation of U, V, or P
u = axial velocity, or perturbation over U
v = circumferential velocity, or perturbation over V
p = static pressure, or perturbation over P
z = generic representation of u, v, or p
u = axial velocity perturbation over U
v = circumferential velocity perturbation over V
p = static pressure perturbation over P
z = generic representation of u, v, or p
n = subscript for n-th Fourier mode
= n/R
si = sinhli
ci = coshli
i = tanhlI = si/ci
e = tanhle
All other symbols are auxiliary and defined locally in the text.
1. Introduction
Compressors are routinely utilized in processes involving
pressurized fluids. In axial compressors, the kinetic energy of a
set of rotating airfoils is imparted to the fluid moving in the
direction parallel to the axis of rotation. Such compressors form a
principal component of turbojet engines in aerospace
applications. Certain aerodynamic instabilities in compression
systems manifest themselves as the phenomena of rotating stall
and surge. The former is basically a two-dimensional flow
oscillation that involves a circumferentially rotating partial flow
blockage. The latter is a mostly axisymmetric oscillation that may
involve mass flow reversals during part of a cycle. These
instabilities result in a loss of compression system performance
and operating efficiency. The conventional approach of
addressing them has been to constrain compressor operation to a
stable region at a safe margin from the stall inception point. The
use of this stall margin represents a loss of opportunity of
compressor performance.
The first unified modeling of these instabilities was
successfully accomplished in mid 1980’s by Moore and
Greitzer1,2. The work of Moore and Greitzer marked the
culmination of a series of investigations3-9 in which the authors
concentrated mainly on the partial aspects of the problem and
either treated the two instabilities in isolation from each other, or
focused mostly on their steady-state characteristics. The MooreGreitzer model1,2 was the first to describe the unsteady behavior
of these instabilities under a common framework, providing
investigators and engine designers with many practical insights
regarding the phenomena of compressor rotating stall and surge.
Being interested in the practical control and modeling of these
phenomena10, in this paper we present an extended model for the
instabilities that relaxes some of the underlying assumptions that
Post-Doctoral Fellow, Member AIAA
Senior Research Engineer, Member AIAA
Professor, Senior Member AIAA
David S. Lewis, Jr. Chair and Regents’ Professor, Member NAE, Fellow AIAA
Copyright © 1999 by the American Institute of Aeronautics and Astronautics, Inc. All rights reserved.
1
American Institute of Aeronautics and Astronautics
AIAA-99-2124
have led to the Moore-Greitzer model. The most severe
restriction shared by both models is, that, compared to the
circumferentially averaged flow variables, the flow perturbations
in the compressor ducts are assumed to be small. In addition,
Moore and Greitzer’s1,2 analysis assumes infinitely long inlet and
outlet ducts and vanishing perturbations at the entrance to the
inlet and at the exit from the outlet duct. In the present work, on
the other hand, we explicitly take the inlet and outlet ducts to be
finite and investigate the effect that a generic boundary condition,
imposed at the entrance to the inlet may have on the settling and
evolution of the instabilities. After reviewing the Moore-Greitzer
model1,2 in Section 2, we start our analysis with the governing
equations of continuity and momentum in Section 3. In Section 4
we solve for the circumferentially averaged part of these
equations. In Section 5 we derive the equations governing the
perturbation dynamics about the circumferentially averaged flow
variables. Sections 6 and 7 supply the exact Fourier series
solution of the equations derived in Section 5. Section 8 defines
the form of the solution individually at the inlet and the outlet
ducts of the compressor. The next five sections present the
application of the conditions on these solutions for the purpose of
deriving a physically meaningful particular solution. Of these,
Sections 9, 10, and 13 represent the matching conditions at the
compressor blades, while Sections 11 and 12 represent the
boundary conditions at the exit from and entrance to the
compressor ducts. Nonlinearities enter the particular solution
only through the pressure rise condition of Section 13. This
brings in explicitly the compressor map and forces us to restrict
our discussion (for the sake of simplicity) to the first Fourier
mode only. This is fully consistent with the treatment that has led
to the Moore-Greitzer model1,2, since, Moore-and Greitzer have
similarly obtained their model as a first mode Galerkin
approximation of the full underlying dynamics. The results of
Sections 9-13 are pieced together in Section 14, where our model
is extracted using a limiting argument (long but finite compressor
inlet). For the reader who wishes to take a shortcut, our extended
model is described by Eqs. (1,2,100,101) and can be compared
directly with the Moore-Greitzer model, given by Eqs. (1-4).
Only the last two equations of these models are different.
Qualitative and quantitative comparisons of the two models are
given in Section 15. The most important results are summarized
in Section 16.
UR L
(4)
R 2R mL
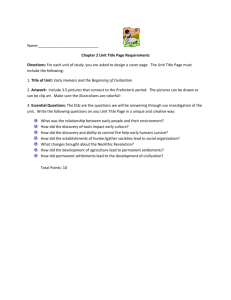
These are based on several assumptions and approximations. At
the compressor duct (see Fig. 1) the Mach number is assumed to
be low, and the airflow is modeled as incompressible.
Compressibility effects are taken into account at the plenum. At
the place of the duct where the blades B are located the axial part
of the flow is described by a velocity component u. This in
general varies only along the circumference, described by the
azimuthal direction y. The first harmonic of u with respect to a
properly chosen reference frame is given by U+Asiny, where U is
the average value of u along the circumference and A is the
amplitude of the velocity perturbation due to the rotating stall.
(u) is the compressor blade aerodynamic force characteristic
(compressor map). The acceleration that the air experiences in the
compressor duct equals the difference between the force per unit
cross section area and the pressure rise P across the cavity,
divided by a characteristic constant, lc, representing the mass of
the air enclosed in the cavity. This is the reasoning that leads to
Eq. (1). The rate of change of the pressure rise P is determined
from the balance between the flow incoming to the plenum from
the compressor duct and the flow outgoing from the plenum
through the throttle, T. This leads to Eq. (2), in which lb is a
second constant characterizing the plenum volume, and S
represents a generalized throttle valve area. Equations (3,4) are
predictions of the Moore-Greitzer model concerning the
dynamics of the rotating stall amplitude and phase. Here they
have been written in dimensional variables that we will use in our
analysis. Equation (4) is decoupled from the rest. Its right-hand
side represents a prediction regarding the rotating stall frequency.
The Moore-Greitzer model assumes that the pressure perturbation
in the outlet duct, measured over the value of the static pressure
in the plenum, is small. Because of the interdependence of the
pressure and velocity perturbations this assumption basically
restricts the Moore-Greitzer model to be a small perturbation
model in A. Namely, it is strictly valid only for small A
(mathematically speaking, infinitesimal A). We would like to
stress right at the start that this assumption also underlies the
present paper. The model that we derive in this paper is still a
small perturbation model but it differs from the Moore-Greitzer
model only in the description of the amplitude and phase
dynamics (Eqs. (3,4)).
2. The Moore-Greitzer Model
The Moore-Greitzer1,2 model describes the time evolution of
the velocity/pressure field for an axial compressor. It is described
by the following four integro-differential equations:
U
1
2 lc
P
2
U A sin d l
1
0
lb
U S P
lc
P
(1)
Plenum
T
(2)
1
U A sin sin d
2R mL
0
Outlet
B
Fig. 1 Simplified compressor geometry
2
A
Inlet
c
(3)
3. Governing Equations
For purposes of consistency with the Moore-Greitzer
model1, we will assume that the compressor inlet and outlet ducts
(see Fig. 1) are cylindrical annuli of long enough length and
infinitesimal thickness, so that the flow there can be assumed
two-dimensional. The plenum static pressure will be denoted by
2
American Institute of Aeronautics and Astronautics
AIAA-99-2124
PS, while the stagnation pressure far upstream of the compressor
by PT. Both PS and PT will be assumed to be constant. Let x, y
denote respectively the axial and circumferential directions in
such a compressor duct. The blades B are assumed to be
concentrated at x=0. The entrance to the inlet duct is at x=-li,
while the discharge from the outlet duct to the plenum takes place
at x=le. The flow of an inviscid, incompressible fluid, of density
, in such a duct can be described by two velocity components, u,
v, along the x, y directions, and by the pressure, p, at each point
of the duct. The governing equations of continuity and
momentum for such a flow field, at the inlet or the outlet, are:
u
v
(5)
0
x
y
We use the quasi-steady approximation of Eq. (13) and
substitute from Eq. (8) into the governing Eqs. (5-7). We also
take into account Eqs. (10-11) and neglect terms of order higher
than the first in u, v, p. We then find the following linearized
perturbation dynamics about the mean flow field of Eqs. (10-11):
u
v
(14)
0
x
y
u
u
u 1 p
u
v
0
t
x
y x
(6)
v
v
v 1 p
u
v
0
t
x
y y
(7)
In Eqs. (14-16) we have suppressed for simplicity the notation
regarding the perturbations u, v, p. Except where we make
mention to the contrary we will adhere to this policy in the rest of
the paper. For constant U, V Eqs. (14-16) are linear with constant
coefficients. To solve them we note that since any perturbation is
a periodic function of the circumferential coordinate y (with
period 2R), it should afford a Fourier series expansion of the
form:
4. Circumferentially Averaged Mean Flow Field
Any flow variable, u, v, or p, represented from now on
generically by z, can be decomposed as:
(8)
zx, y, t Zx, t zx, y, t
where, Z is the circumferentially averaged mean value of z, and
z represents a perturbation. By definition:
Zx , t
1
2R
2 R
2 R
0
0
zx , y, t dy ;
zx, y, t dy 0
(9)
We substitute from Eq. (8) into Eqs. (5-7) and integrate with
respect to y from y=0 to y=2R. We assume that compared to the
mean flow variables the perturbations z are small. Then, in the
resulting expressions, because of Eqs. (9), the first order terms in
z drop out. If in addition we neglect the higher order terms in z
we are left with the equations:
U
V
V
0 ;
U
0
(10)
x
t
x
U
U 1 P
(11)
U
0
t
x x
that govern the time evolution of the mean flow field. The
general solution of Eqs. (10,11) is:
x P t (12)
U Ut ; V V x Udt ; P U
0
Here U, P0 are arbitrary functions of t, and V is an arbitrary
function of the argument in parenthesis. The dot denotes
differentiation with respect to t. To study the perturbation
dynamics associated with such a mean flow field we will make
an assumption that amounts to a separation of time scales. We
assume that even if U, V change with time at each x, the time
scale associated with such change is much larger than the time
scale of the dynamics of u, v, and p that we wish to study.
That is, from the point of view of the perturbation dynamics, the
mean flow variables U, and V appear as frozen. Thus, when we
study the perturbation dynamics we neglect the time dependence
of U, V, and assume that:
(13)
Ut constant ;
Vt constant
u
u
u 1 p
Ut
Vt
0
t
x
y x
(15)
v
v
v 1 p
Ut
Vt
0
t
x
y y
(16)
zx , y, t
z
ns
x, t sin y z nc x, t cos y
(17)
n 1
where =n/R. In Eq. (17) z stands generically for u, v, p, while
zns and znc stand generically for the sine components uns, vns, pns,
and the cosine components unc, vnc, pnc of the perturbations. If we
substitute from Eq. (17) into Eqs. (14-16) we can separate sine
and cosine components for each n and obtain a set of equations in
x, t that we can solve analytically. In the next section we present
the end result. In Section 7 we supply the details.
6. Fact
In terms of the sine components uns, vns, pns, and the cosine
components unc, vnc, pnc of the perturbations, the general solution
of Eqs. (14-16) is:
us Nt cosh x Mt sinh x
Gt x Usin Vt Ft x Ucos Vt
(18)
Ft x Usin Vt Gt x Ucos Vt
(19)
uc Lt cosh x Kt sinh x
vs Kt cosh x Lt sinh x
U Ft x Usin Vt U1Gt x Ucos Vt (20)
1
vc Mt cosh x Nt sinh x
U Gt x Usin Vt U1Ft x Ucos Vt (21)
UN VK cosh x
p M
1
s
UM VL sinh x
N
UL VM cosh x
pc K
L UK VN sinh x
(22)
(23)
where, M, N, K, L are arbitrary functions of t, while F, G are
arbitrary functions of t-(x/U). Moreover, if the perturbation field
is irrotational, the functions F and G are identically zero. The dot
here denotes differentiation with respect to t while the prime
denotes differentiation with respect to t-(x/U).
5. Perturbation Flow Field
3
American Institute of Aeronautics and Astronautics
AIAA-99-2124
Note that in Eqs. (18-23) we have suppressed the subscript n
regarding the sine and cosine components of u, v, p. We will
adhere to this policy in the rest of the paper.
7. Proof
Here we show the claim made in the previous section. We
start with the transformation:
(24)
x Ut ;
y Vt ;
t
Then, under the constancy assumption of U, V, Eqs. (14-16) are
transformed into:
u v
(25)
0
u 1 p
v 1 p
(26)
0 ;
0
Before proceeding further we note two things. First, both in the
original and the transformed variables the pressure perturbation
obeys Laplace’s equation:
p
2
p
2
z, ,
2
~z
ns
p
2
p
2
0
(27)
x
y
2
Equation (27) is valid only for a small perturbation field. It was
also used explicitly by Moore and Greitzer1 (see Eq. (17) of Ref.
1) and it is the primary approximation that confines the validity
of their model to a small rotating stall amplitude A. Second, from
Eqs. (26) we find that:
v u
0
(28)
This just expresses the fact that the vorticity of the perturbation
field is conserved and travels downstream at the speed of the
mean flow.
Any variable that is periodic in y is also periodic in (with
the same period, 2R). Thus, instead of the expansion of Eq. (17)
we can cast an equivalent expansion for u, v, p of the form:
2
2
, sin ~znc , cos
(29)
n 1
where =n/R. If we substitute from Eq. (29) into Eqs. (25-26) we
can separate sine and cosine components for each n and obtain
the following set of equations in the independent variables ,
~
us
~
uc
(30)
~
vc 0 ;
~
vs 0
~
us 1 ~
ps
~
uc 1 ~
pc
(31)
0 ;
0
~
vs ~
p
~
vc ~
p
(32)
c 0 ;
s 0
Here we suppressed again the subscript n. Using Eqs. (30,32) we
can eliminate ~
vs, ~
vc, ~
ps, p~c. Then, Eqs. (31) imply that:
2~
us
2~
us 0 ;
2
2~
uc
2~
uc 0
2
Integrating with respect to once we get:
2~
us
2~
uc
2~
u s f1 ;
2~
u c g1
2
2
(33)
(34)
where f1, g1 are arbitrary functions of . Integration of Eqs. (34)
now leads to:
~
us Ae Be f
(35)
~
(36)
uc Ce De g
where, f, g are arbitrary functions of and A, B, C, D are
arbitrary functions of . The solution for the remaining sine and
cosine components is obtained by substituting from Eqs. (35,36)
into Eqs. (30,32):
1
~
(37)
vs Ce De g
1
~
vc Ae Be f
~
ps A
e Be
(38)
(39)
~
(40)
pc C
e De
Here, the dot denotes differentiation with respect to while the
prime denotes differentiation with respect to . Equations (35-40)
represent the solution to the transformed problem of Eqs. (25,26).
To find the solution to the original problem of Eqs. (14-16) we
use the transformation of Eqs. (24) and also note from Eqs.
(17,29) that, for each mode, the relationship between the
quantities with or without a tilde, is:
(41)
zs ~
zs cos Vt ~
zc sin Vt
zc ~
zc cos Vt ~
zs sin Vt
(42)
It takes some algebra to use the above facts, redefine the six
functions A, B, C, D, f, g (that are arbitrary to begin with), use
hyperbolic sines and cosines rather than exponentials11, and show
that Eqs. (18-23) are equivalent to Eqs. (35-40). The solution thus
(for each mode) depends on six arbitrary functions. Four of them
are functions of t (or ), and two of them are functions of t-(x/U)
(or ). The functions K, L, M, N are linear combinations of A, B,
C, D. Similarly, the functions F, G are linear combinations of the
functions f, g. The reason we expressed our solution in the form
of Eqs. (18-23) is that the application of the conditions that lead
to a particular solution is more transparent using this form.
When the flow is irrotational the term inside the parentheses
in Eq. (28) vanishes. In terms of the sine and cosine components
of u, v this implies:
~
vs
~
vc
(43)
~
uc 0 ;
~
us 0
Substituting from Eqs. (35-38) into Eq. (43) it can be shown that
in this case there is no loss of generality if one takes f, g, or
equivalently F, G to be identically zero.
8. The Solution in the Inlet or the Outlet Duct
A solution in the form of Eqs. (18-23) applies individually at
the inlet duct (x<0) and the outlet duct (x>0). In accordance with
the Moore-Greitzer model we will assume that the flow at the
inlet is irrotational. Then, with F, G set to zero the solution at the
inlet can be written as:
(44)
us us0 t cosh x vc0 t sinh x
uc uc0 t cosh x vs0 t sinh x
(45)
vs vs0 t cosh x uc0 t sinh x
(46)
4
American Institute of Aeronautics and Astronautics
AIAA-99-2124
vc vc0 t cosh x us0 t sinh x
(47)
ps v c0 Uus0 Vi vs0 cosh x
u s0 Uvc0 Vi uc0 sinh x
(48)
(22,23) and substituting from Eqs. (55,56) we can express this
condition as (e=tanhle):
UN bK u
M
(57)
e s0
UL bM u
K
e c0
(58)
pc v s0 Uuc0 Vi vc0 cosh x
(49)
u c0 Uvs0 Vi us0 sinh x
Here, we have denoted the four functions N, L, K, M by u s0, uc0,
vs0, vc0 respectively. These represent the values of us, uc, vs, vc at
x=0-, just in front of the compressor blades. By V i we represent
the circumferential mean flow velocity in the inlet. Note that the
irrotationality assumption requires that V i be strictly constant, in
consistency with the quasi-steady approximation of Eq. (13). For
the outlet we make no assumptions regarding the vorticity of the
flow. We thus use the notation of Eqs. (18-23) to represent the
solution at the outlet, with the exception that we use V e to
represent the circumferential mean flow velocity there. We need
not attach a subscript to the axial mean flow component U since
by continuity it is the same throughout the compressor.
12. Boundary Condition at x=-li
At the entrance to the inlet (x=-li), to investigate the effect
that the design geometry, etc. might have on the perturbation
dynamics, we examine a generic boundary condition of the form:
(59)
hU u, V v, P p 0
For small perturbations u, v, p we can expand this in a Taylor
series and keep only first order terms. Then, Eq. (59) becomes:
(60)
hU, V, P h u u h vv h pp 0
This whole condition is imposed at x=-li, while the partial
derivatives are evaluated at the mean flow condition. Integrating
Eq. (60) over one period (2R) in y and using Eqs. (9) we find
that h(U,V,P) must be zero. This imposes a boundary condition
on the mean flow. Subtracting this from Eq. (60) we get a
condition that we can write as:
(61)
k pp Uk u u k v v 0
9. Go-Through Assumption at x=0
The first condition that we will implement is the “gothrough” assumption of Moore and Greitzer1. This just says that
the axial velocity perturbation profile proceeds straight through
the compressor blades with no change. Assuming that the
compressor blades are concentrated at x=0 this implies that the
perturbations in u are continuous at x=0. Using the sine and
cosine components of u we thus equate the right hand sides of
Eqs. (18,19) with the right hand sides of Eqs. (44,45),
respectively, at x=0. We then solve for F, G to find:
(50)
Ft uc0 Lsin Vet us0 Ncos Vet
where, kp, ku, kv are coefficients that depend on the mean flow
variables, the geometry of the inlet, and in particular, the length
of the inlet li. Since multiplying these by a constant does not
change the above boundary condition, there is no loss of
generality in normalizing the k’s according to:
Gt us0 Nsin Vet uc0 Lcos Vet
This eliminates the functions F, G from the problem.
(51)
10. Blade Condition at x=0+
The next condition expresses the intuitive notion that the
flow direction right after the compressor blades (x=0+) is always
constant. In terms of the total flow we can express this as:
(52)
Ve v b U u
where b is the tangent of some blade exit angle. Integrating over
one period in y and using Eq. (9) we find that Eq. (52) must hold
individually for both the mean flow and the perturbations:
(53)
Ve b U ;
v bu
In terms of the sine and cosine components of u, v this implies:
(54)
vs b us ;
vc b uc
Substituting from Eqs. (18-21) with x=0, and eliminating F, G
using Eqs. (50,51) we find that Eqs. (54) imply:
UM bL u
N
(55)
s0
L UK bN u c0
(56)
11. Boundary Condition at x=le
We will assume that at the exit from the outlet (x=l e) the
flow discharges as a free jet into the plenum. For a plenum with
dimensions much larger than that of the compressor this implies
that the pressure perturbation at x=le must be zero. Using Eqs.
k 2p 2 U 2 k 2u k 2v 1
If we define two new k’s through:
k vp k v U k pVi ;
(62)
k pu U k p k u
(63)
then, in terms of the sine and cosine components of the
perturbations, substituting from Eqs. (44-49) into Eq. (61) we get:
k p i u s0 v c0 k vp i u c0 vs0 k pu i vc0 us0 0 (64)
k p i u c0 v s0 k vp i us0 vc0 k pu i vs0 u c0 0 (65)
where, i=tanhli. We will return to this condition in Section 14.
13. Pressure Rise Condition at x=0
In this section, up to Eq. (77), we return to the practice of
denoting the total quantities by u, v, p and the perturbations by
u, v, p. The last condition that we will implement concerns
the pressure rise imparted to the fluid by the compressor blades at
x=0. Using the local blade characteristic, denoted by L, this can
be expressed as:
u
u
p 0 , y, t p 0 , y, t L u mL
U R L
(66)
t
y
This is in effect the same as Eq. (5) of Moore and Greitzer 1,
written in our notation. We want to express this using the global
axisymmetric characteristic , rather than L. The pressure at
the outlet duct (x>0) is:
l x p
p PS U
(67)
e
The first two terms represent the mean pressure (see Eq. (12)).
Evaluating this at x=0+ yields:
l p 0 , y, t
(68)
p 0 , y, t P U
S
e
Applying Bernoulli’s theorem between a point far upstream of
the compressor and the compressor blades (x=0-) we also get:
5
American Institute of Aeronautics and Astronautics
AIAA-99-2124
2
u v2
(69)
2
t
Here is the velocity potential at the inlet. Subtracting Eq. (69)
from Eq. (68) and using Eq. (66) we get:
p 0 , y, t PT
2 u
(70)
t
The global axisymmetric compressor map, , is the pressure rise
PS-PT that would be realized under axisymmetric operation with
no y or t dependence. From Eq. (70) this is:
2
v2
u L u u 2 v 2
2
(71)
In Eq. (71) it is implicitly assumed that v is induced by u (so it is
a function of u) during such operation. Now, Eq. (66) becomes:
p p u
2
u
u
u v 2 mL
U R L
2
t
y
(72)
Here we suppressed the arguments of p for simplicity. Like every
other flow variable, under general disturbances, affords a
formal Fourier series expansion:
U u 0
ns sin y nc cos y
(73)
where u=u(0,y,t). The coefficients of this series are given by:
1
2R
ns
nc
1
R
1
R
2 R
U u0, y, t dy
2 R
U u0, y, t sin y dy
(75)
0
2 R
U u0, y, t cos y dy
(76)
0
c
p 0 , y, t p 0 , y, t Uu0, y, t
Vi v 0 , y, t mL
u
u
U R L
t
y
(77)
Here, represents the summation term in Eq. (73). Starting
with Eq. (77) u, v, p again represent perturbations. In Eq. (77) we
neglected perturbation terms of order higher than the first. Note
that v is evaluated just before the compressor blades, at x=0 -. No
such notation is necessary for u since it is continuous at x=0 (See
Section 9). Splitting Eq. (77) into sine and cosine components
(see Eqs. (17,73)), and suppressing the subscript n we obtain the
two conditions:
ps 0 , t ps 0 , t s Uus 0, t
R
c
(78)
R
s
(79)
The pressure perturbation components at the outlet are given by
Eqs. (22,23), with V=Ve=bU. The perturbation components at the
inlet are given by Eqs. (44-49). Substituting from these, and
taking into account Eqs. (57,58) we find, after some algebra, that
Eqs. (78,79) imply:
e mLu s0 v c0 s 2UR Luc0
(80)
e mLu c0 v s0 c 2UR Lus0
(81)
In the rest of the paper, we will assume that the perturbation u in
the argument of is approximated by its first Fourier mode.
Using the dummy variable =y (=n/R), and with n=1 (first
mode) the integrals s, c can then be written explicitly as:
s
c
1
1
2
U u
s 0 sin u c 0 cos
sin d
(82)
cos d
(83)
0
2
U u
s 0 sin u c 0 cos
0
Equations (80,81), together with the above expressions for s, c
conclude the application of the boundary conditions.
(74)
0
Substituting from Eq. (73), and changing u, v, p to U+u, V+v,
P+p, we can integrate Eq. (72) over a period (2R) in y and
extract from it a mean flow part which eventually leads to the
first of Moore-Greitzer equations (see Eq. (1)). Subtracting this
mean flow part from Eq. (72) leaves us with a perturbation
condition, that, getting rid of the notation we can write as:
n 1
0
s
i c
u
u
l
PS PT L u mL
U R L U
e
t
y
p 0 , y, t
ut U Lu 0, t
pc 0 , t pc 0 , t c Uuc 0, t
u
V v 0 , t mL
U Lu 0, t
t
Vi vs 0 , t mL
14. Extraction of the model
We summarize our findings of Sections 9-13. For each
Fourier mode we need to determine ten functions. Four of them,
us0(t), uc0(t), vs0(t), vc0(t) fix the (irrotational) perturbation field at
the inlet. The remaining six, K(t), L(t), M(t), N(t), F(t-x/U), G(tx/U) fix the flow field at the outlet (see Sections 6,8). We applied
three matching conditions at the compressor blades (x=0) and
two boundary conditions, at the entrance and at the exit of the
compressor duct (x=-li, le). In terms of the sine and cosine
components these translated into the ten conditions found in Eqs.
(50,51,55-58,64,65,80,81). The first two of these are algebraic
equations, while the rest are differential equations. This means
that each Fourier mode of the flow field is described by eightdimensional dynamics. In the rest of the paper we will
concentrate exclusively on the first Fourier mode (n=1) and use
the approximation of Eqs. (82,83) for the integrals s and c.
This is basically the same as the first mode Galerkin
approximation of Moore and Greitzer.
The flow dynamics at the inlet is decoupled from the flow
dynamics at the outlet (Eqs. (64,65,80-83) do not contain K, L,
M, N, F, G). In particular, the former dynamics drives the latter
(see Eqs. (50,51,55-58)). Interestingly, the transient dynamics of
the (mathematical) variables K, L, M, N, given by Eqs. (55-58)
with us0, uc0 set to zero, is always linear and unstable. However, it
can be shown that the transient of the physically meaningful
quantities, us, uc, vs, vc, ps, pc (see Eqs. (18-23)) is always stable.
Equations (64,65,80,81) lead to our first generalization of
the Moore-Greitzer model. Namely, they replace Eqs. (3,4),
while Eqs. (1,2) are retained. Because of the boundary condition
of Section 12, we see that, in general, even for the first Fourier
mode, there may be additional dynamics representing the effect
6
American Institute of Aeronautics and Astronautics
AIAA-99-2124
of a finite inlet. Examining the properties of this new model
represents a project in itself and is beyond our scope in this
paper. Rather, in what follows we will use a limiting argument,
valid for a long (but finite) compressor duct and derive a
simplified model that will give us some preliminary insights
regarding the effect a finite inlet may have on the perturbation
dynamics.
If we consider compressor ducts of increasing inlet length, li,
then, as li tends to infinity i=tanhli tends to one. Then, Eqs.
(64,65) are decoupled from Eqs. (80,81), since they become:
(84)
k p u s0 v c0 k vp u c0 vs0 k pu us0 vc0 0
k p u c0 v s0 k vp us0 vc0 k pu u c0 vs0 0
These are linear equations with complex eigenvalues:
s1,2 k pu i k vp / k p
(85)
(86)
If kpu/kp<0, then, after an initial stable transient the v components
at x=0 are synchronized with the u components according to:
(87)
vc0 us0 ;
vs0 uc0
By examining Eqs. (44-47) at x=-li, we can verify that Eqs. (87)
also guarantee that us, uc, vs, vc won’t grow without bound at the
entrance to the inlet x=-lI as li goes to infinity. No such guarantee
however exists during the initial transient, unless, as l i goes to
infinity the initial transient becomes instantaneous. The
mathematical condition for this to occur is:
(88)
k p 0 as li
Returning now to the case in which the compressor duct is
long but finite, we can assume, based on the above condition, that
the dynamics of Eqs. (64,65) is much faster than the dynamics of
Eqs. (80,81). The final simplification is thus achieved by simply
setting kp=0 in Eqs. (64,65), making the corresponding dynamics
instantaneous. Then, getting rid of the constants kvp and kpu,
defined in Eqs. (63), we see that Eqs. (64,65) reduce to the
algebraic conditions:
(89)
k v iuc0 vs0 ku i vc0 us0 0
(90)
ku i vs0 uc0 k v ius0 vc0 0
Now that kp is set to zero, with no loss of generality, we can
replace the boundary condition of Eq. (61) and the normalization
condition of Eq. (62) by:
(91)
kuu k vv 0 ;
k 2u k 2v 1
Equations (89,90) are still consistent with Eqs. (91). The path
toward obtaining a simplified model is now clear. We just solve
Eq. (89,90) for vs0, vc0 (si=sinhli, ci=coshli):
k c
2 2
v i
k c
k 2usi2 vs0 k u k vus0 sici uc0
(92)
(93)
k 2usi2 vc0 sici us0 k u k vuc0
and substitute into Eqs. (80,81) to get a set of equations that
contain only us0, uc0. After defining the two auxiliary constants:
sc
k k
T e mL 2 2 i i 2 2 ; Q 2 2 u v 2 2
(94)
( k v ci k u s i )
( k v ci k u s i )
the result can be written as:
T2 Q2 u s0 Ts Qc 2UR LTuc0 Qus0 (95)
2 2
v i
T
Tc Qs 2UR LTus0 Quc0 (96)
Where, s, c are given by Eqs. (82,83). Our simplified model
now consists of Eqs. (1,2,95,96). For more insight, and for ease
of comparison with the Moore-Greitzer model1,2 we will now
switch to amplitude-phase components by setting (for the first
mode =1/R):
(97)
u0, y, t At sin y t
Expanding this and comparing with:
(98)
u0, y, t us0 t sin y uc0 t cos y
2
Q2 u c0
we deduce that the amplitude, A, and the phase, , are related to
us0, uc0 by:
(99)
us0 t At cos t ;
uc0 t At sin t
Using Eqs. (99) we can replace Eqs. (95,96) by the equivalent
dynamics:
T U, A 2 U L Q A
(100)
T 2 Q2 A
s
R
T
Q
(101)
s U, A 2 U R L T
A
In obtaining the above dynamics we encounter linear
combinations of the integrals, s, c of Eqs. (82,83). After some
algebra these lead to two new integrals, defined by:
2
Q2
s U, A
c U, A
1
1
2
U A sin sin d
(102)
0
2
U A sin cos d
(103)
0
Of these, s(U,A) is identical to the integral in the third equation
of the Moore-Greitzer model (see Eq. (3)). Here it appears in
both of Eqs. (100,101). c(U,A) on the other hand is identically
zero and drops out of the final result.
This concludes the extraction of our model. Our extended
model for compressor rotating stall and surge is described by
Eqs. (1,2,100,101) and the auxiliary Eq. (102) supplying the
explicit expression for s.
15. Implications for Stability and Control
When the constant Q is zero Eqs. (100,101) reduce to:
2 UR L
U, A ;
(104)
A
s
T
T
This occurs (see Eqs. (94)) either when ku=0, namely, when the v
perturbations at x=-li vanish, or when kv=0, in which case the u
perturbations at x=-li vanish (see Eqs. (91)). Qualitatively, Eqs.
(104) are the same as Eqs. (3,4). More explicitly, substituting
from Eqs. (94) for T, and using i=si/ci, the circumferential speed
of the perturbations predicted by Eqs. (104) can be written as:
2 U R L( k 2v k 2u 2i )
(105)
( e mL) (k 2v k 2u 2i ) i
As the inlet and outlet lengths go to infinity, the hyperbolic
tangents i, e go to one, and Eq. (105) becomes:
7
American Institute of Aeronautics and Astronautics
AIAA-99-2124
UR L
(106)
R 2R mL
This is effectively the rotating stall speed predicted by Moore and
Greitzer (see Eq. (4)). However, no experimental evidence
suggests that the u or v perturbations will individually vanish at
the entrance to a finite inlet duct, so Q must be zonzero. This
implies qualitative differences between our model and the
Moore-Greitzer model. Returning to our model, Eqs.
(1,2,100,101), we see, from Eq. (100), that, exactly at rotating
stall, where A, U are constant:
s U, A U R L Q
(107)
A
T
Substituting this into Eq. (101) we find that at rotating stall the
rotating stall speed is:
2UR L
2 U R L(k 2v k 2u 2i )
(108)
T
( e mL) (k 2v k 2u 2i ) i
This appears to be identical to Eq. (105). The difference is that in
Eq. (105) either ku or kv is zero. We see that when Q is zero the
circumferential speed of the perturbations is always constant,
while for nonzero Q this speed becomes equal to a constant only
at steady state. For nonzero Q, therefore, undergoes a
transition, just like A, U, and P. By examining Eq. (108) we can
show that the minimum of the speed is predicted for ku=1 and
kv=0 and is given by:
U R L 2i
e mL 2i i
2
(109)
The maximum speed, on the other hand, is predicted when ku=0
and kv=1 and given by:
2 UR L
(110)
i e m L
Equation (109) corresponds to zero u perturbations, while Eq.
(110) corresponds to zero v perturbations at x=-li. As the duct
lengths li, le go to infinity both of these expressions become the
same as Eq (106) predicted by the Moore-Greitzer model. This is
one difference between our model and the Moore-Greitzer model
coming from the effect of a finite inlet duct.
P
q
p n
s
g
m
h
f
d
l
a
e
c
b
o
k
r
U
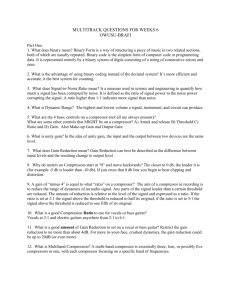
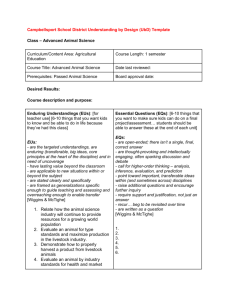
Fig. 2 Qualitative locus of equilibrium points for a typical
compressor, together with four throttle characteristics
The next difference concerns the point of the compressor
map at which the compressor operation transitions from being
stable to being unstable. This can be uncovered by examining the
linearized dynamics of Eqs. (1-4) or Eqs. (1,2,100,101) about an
axisymmetric (A=0) equilibrium flow condition. We will first
summarize the implications of the Moore-Greitzer model1,2, for
which the loss of stability occurs at the peak of the compressor
map where '(U)=0. Operation near or at this peak is very
desirable because it corresponds to maximum pressure rise across
the compressor.
A
c
e
S
b
SIP
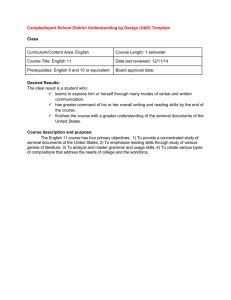
Fig. 3 Qualitative bifurcation diagram for
the equilibrium values of A vs S
Figure 2 shows qualitatively, in the plane of P vs U, the
locus of equilibria for a typical compressor model, for constant S.
Setting the right-hand sides of Eqs. (1,3) to zero results in the
branches abdsghr and bcfdlkes. The first is the unstalled branch
of equilibria (USB). It is just a plot of the compressor map (U)
vs. U. On it A is zero. The second is the stalled branch of
equilibria (SB). On it A is nonzero. A throttle characteristic
corresponds to a constant value of the throttle valve area S. On it
the right-hand-side of Eq. (2) is zero. Several such characteristics,
corresponding to different values of S, are shown in Fig. 2. The
intersection of a throttle characteristic and the SB or USB defines
a possible operation point. For constant S bold dashed lines
depict unstable operation points while bold solid lines depict
stable operation points. As S is decreased the throttle
characteristic shifts from ohm to oegn to oksp and the stable
operation point shifts from h to g to s. For the Moore-Greitzer
model1,2 s is the stall inception point (SIP). Under operation with
no disturbances at s, A is identically zero, while P is a
maximum. The Moore-Greitzer model1,2 further implies that if S
is decreased beyond its SIP value the stable operation point
jumps to the stable part of the SB, cfdlke. Neither the MooreGreitzer model, nor the model that we developed here describes
the real transition dynamics during such a jump, because they are
both small perturbation models in the amplitude A. Thus, during
operation under constant S at SIP, an arbitrarily small disturbance
in S is enough to throw the compressor into the RS regime (point
k). Decreasing S further moves the stable operation point toward
l. Increasing S moves the stable operation point toward e and then
g (after a second jump), giving rise to the hysteresis loop skegs.
Figure 3 depicts the corresponding locus of equilibrium values of
A as a function of S for a typical compressor model. The RS
instability arises because of the jump in the stable equilibrium of
A from 0 to a finite value as S crosses its value at the SIP. The
axis A=0 represents the axisymmetric branch of equilibria
(corresponding to USB), characterized by an absence of RS and
axially symmetric flow through the compressor (A=0 and u=U).
8
American Institute of Aeronautics and Astronautics
AIAA-99-2124
The branch secb represents the nonaxisymmetric branch of
equilibria (corresponding to SB), for which RS is present.
The above implications of the Moore-Greitzer model are
qualitatively modified under our model. For our model (see Eqs.
(1,2,100,101)) the transition from stability to instability occurs
when:
UR L Q
U
(stall inception point)
(111)
T
Equation (111) defines the bifurcation point of the compressor
map at which, say, U=USIP. Stable operation occurs for U> USIP.
The mathematical condition for this is:
UR L Q
U
(stable operation)
(112)
T
Unstable operation occurs when U< USIP, namely, when:
UR L Q
U
(unstable operation)
(113)
T
Thus, under our model the stall inception point does not coincide
with the peak of the compressor map, unless Q=0. Clearly, during
stable axisymmetric operation, as the throttle closes down and the
equilibrium U is decreased, depending on the sign of Q the
transition to instability may be hastened or delayed. If Q<0 then
the instabilities appear before the peak of the compressor map is
reached. Experience with real compressors suggests that the loss
of stability indeed occurs slightly before the peak. To delay the
loss of stability beyond the peak (where we want the compressor
to operate) it is desirable to have Q>0. This suggests that if we
can design an inlet that imposes a boundary condition on the flow
with a small but strictly positive Q we could delay the transition
to instability beyond the peak of the compressor map. Compared
with the throttle valve area S, which has been used in the past for
purposes of control, Q affects the amplitude dynamics directly.
This brings up the question of whether we could use Q itself as a
control variable through which we could actively delay the
transition to the instabilities. It is important to remember,
however, that any artificial device of variable geometry
introduced at the inlet for actively changing Q should do so
without shedding any significant vorticity to the flow field.
Otherwise, our analysis that assumed irrotational flow in the inlet
duct becomes invalid. Such an approach would also necessitate a
more fundamental account of ku, kv, and Q, in terms of inlet
design parameters.
16. Conclusions
We presented a quantitative model describing the instability
dynamics in axial compressors. The assumptions underlying our
model are similar to the ones underlying the well-known MooreGreitzer model of the literature. Accordingly, our results can be
directly compared with the implications of that model. The most
severe restriction shared by both models is, that, compared to the
circumferentially averaged flow variables, the flow perturbations
in the compressor ducts are assumed to be small. The MooreGtreitzer model takes the lengths of the inlet and exit ducts as
infinite whereas we took these ducts to be long but finite. Thus,
the Moore-Greitzer model is obtained as a limiting special case
from our model. The approach in deriving the Moore-Greitzer
model pivots on an integration of the axial momentum equation
from the upstream reservoir to the plenum. Our approach was
based on a Fourier series expansion of the periodic dynamical
variables along the circumference and on explicit general
solutions for the coefficients. Our analysis used a first mode
approximation of these solutions. It showed that the perturbation
field in the outlet duct is driven by the perturbation field in the
inlet duct and has no direct dynamical effect on the settling and
evolution of the instabilities. Our model supplies an explicit
expression for the rotating stall circumferential speed that is a
function of the lengths of the ducts. However, in contrast with the
Moore-Greitzer model, this speed does not stay constant with
time but can reach such a steady-state value only after it goes
through a transient. The primary difference between our model
and the Moore-Greitzer model is due to the effect that a finite
inlet might have on the dynamics of a compressor. By examining
a generic boundary condition at the entrance to the inlet we
showed that what happens there may slightly hasten or delay the
settling of the instabilities before or beyond the peak of the
compressor map. This brings up practical questions for the design
of inlets.
Acknowledgment
This work was supported by the U.S. Army Research Office,
MURI project DAAH04-96-1-0008 on Intelligent Turbine
Engines.
1
2
3
4
5
6
7
8
9
10
11
References
Moore, F.K., and Greitzer, E.M., "A Theory of Post-Stall
Transients in Axial Compression Systems: Part I-Development
of Equations," Journal of Turbomachinery, Vol. 108, Jan.
1986, pp. 68-76.
Greitzer, E.M., and Moore, F.K., "A Theory of Post-Stall
Transients in Axial Compression Systems: Part IIApplication," Journal of Turbomachinery, Vol 108, April
1986, pp. 231-239.
Greitzer, E.M., “Surge and Rotating Stall in Axial Flow
Compressors, Parts I, II,” ASME Journal of Engineering for
Power, Vol. 98, No. 2, April 1976, pp. 190-217.
Day, I.J., Greitzer, E.M., and Cumpsty, N.A., “Prediction of
Compressor Performance in Rotating Stall,” ASME Journal of
Engineering for Power, Vol. 100, No. 1, Jan. 1978, pp. 1-14.
Greitzer, E.M., “The Stability of Pumping Systems – The 1980
Freeman Scholar Lecture,” ASME Journal of Fluids Eng., Vol.
103, June 1981, pp. 193-243.
Cumpsty, N.A., and Greitzer, E.M., “A Simple Model for
Compressor Stall Cell Propagation,” ASME Journal of
Engineering for Power, Vol. 104, No. 2, Jan. 1982, pp. 170176.
Stetson, H.D., “Designing for Stability in Advanced Turbine
Engines,” AGARD CP3424, Engine Handling, Oct 1982.
Koff, S.G., and Greitzer, E.M., "Stalled Flow Performance for
Axial Compressors-I: Axisymmetric Characteristics," ASME
Paper No. 84-GT-93, 1984.
Moore, F.K., “A Theory of Rotating Stall of Multistage
Compressors, Parts I, II, III,” ASME Journal of Engineering
for Power, Vol. 106, No. 2, April 1984, pp. 313-336.
Markopoulos, N., Neumeier, Y., Prasad, J.V.R., and Zinn,
B.T., “Active Control of Compressor Rotating Stall Using
Linear Amplitude Feedback”, 36th Aerospace Sciences
Meeting & Exhibit, Reno, Nevada, January 12-15, 1998, paper
No. 98-0971 – Journal publication pending.
Spiegel, M.R., Mathematical Handbook of Formulas and
Tables, Schaum’s Outline Series, McGraw-Hill, 1968.
9
American Institute of Aeronautics and Astronautics