Chap2000short - UCLA Institute for Geophysics and Planetary

Predicting Geomagnetic Activity: The
D st
Index
Robert L. McPherron and Paul O’Brien
Institute of Geophysics and Planetary Physics, University of California Los Angeles, Los Angeles, California
Geomagnetic activity is usually characterized by magnetic indices. Most indices have long records that allow statistical studies of the causes of activity and of related phenomena. Correlations between indices and possible drivers provide the basis for empirical prediction. Here we examine solar wind control of D st
, an index that is thought to be linearly proportional to the total energy in the terrestrial ring current. We use linear prediction filtering, a technique in which an autoregressive (AR) filter maps past values of the index to the next value, and a moving average (MA) filter maps current and past values of the solar wind input to the next value of the index. These ARMA filters may be determined from historical records by least square optimization. Nonlinear systems can be approximated in a piecewise fashion by localizing the filter. We do this by using narrow bins of the solar wind electric field; VBs . Our model utilizes 37 years of hourly observations to estimate the coefficients representing the quiet time ring current, the solar wind dynamic pressure, the ring current decay rate, and the rate of ring current injection in a simple differential equation. We find that pressure and decay coefficients are fit by exponential functions of VBs , decreasing as VBs increases, but ring current injection is a linear function of VBs . Integration of our model using observations of the solar wind and analytic fits to the coefficients produces a time series that contains 76% of the variance in the original data. The prediction residuals have a Gaussian distribution with zero mean and rms error of 10.6 nT.
1. INTRODUCTION
Space weather consists of a variety of phenomena driven by the solar wind such as substorms, magnetic storms, acceleration of relativistic electrons, and ULF waves. In this paper we report an empirical study of magnetic storms as characterized by the D st
index. Magnetic storms occur when the number and energy of positive ions and electrons drifting in the outer radiation belts increase significantly.
Since electrons and protons drift in opposite directions they produce a ring current around the earth. The direction of this current is westward causing a decrease in the surface field. The D st
index is a measure of the total energy of these drifting particles. D st
is obtained by finding the instantaneous average of the deviations from a quiet day in the horizontal component of the magnetic field at a number of low latitude magnetic observatories.
A magnetic storm typically consists of three phases. The initial phase is a result of an increase in solar wind dynamic pressure. This increase presses the magnetopause current closer to the earth causing a positive perturbation in H. The main phase is a consequence of a southward turning of the interplanetary magnetic field (IMF). When the IMF turns southward magnetic reconnection occurs on the dayside
allowing a fraction of the solar wind electric field to penetrate the magnetosphere [ Reiff and Luhmann, 1986]. This field transports ions from the tail to the inner magnetosphere where they are trapped in the ring current, causing the D st
index to become more negative. The recovery phase is a consequence of the IMF turning northward shutting off the magnetospheric electric field. Particle injection decreases while the drifting ions charge exchange with atmospheric neutral particles losing their energy and thereby decreasing the strength of the ring current.
The purpose of this paper is to illustrate how the strength of the ring current as measured by the D st
index can be predicted by the method of local linear filters. To do this we utilize 37 years of solar wind and geomagnetic data to produce filters for a variety of states of the magnetosphere.
We demonstrate that the coefficients of these models can be represented by analytic functions of a single variable, the solar wind electric field, VBs . We then show that these functions may be used to make multi-step predictions of the index from observations of the solar wind. We evaluate the quality of these predictions showing that they generally provide accurate predictions.
2. PREDICTION FILTERS
A linear prediction filter is written in the following way.
O ( t )
i
N
1 a i
O ( t
i
t )
M
0 j b j
I ( t
j
t ) (1)
The output of a system at the next time step is the sum of two parts. The first part is a weighted sum of previous values of the output. This self-prediction in called auto regression and it represents internal dynamics of the system. The second part is a weighted sum of the current and past values of the input. This part represents the external dynamics. Together the autoregressive (AR) filter coefficients, a i
, and the moving average (MA) coefficients, b j
, constitute an autoregressive moving average (ARMA) filter. With a single set of filter coefficients the representation is completely linear. Such filters can approximate even nonlinear systems, but the more nonlinear the system, the lower the accuracy of the predictions.
ARMA filters are actually discrete representations of differential equations [ Klimas et al., 1998]. Representation of the relation between the input and output of a causal system by a linear prediction filter is equivalent to describing it by a differential equation. Integration of this equation from a known initial condition with a measured input as driver is how prediction is accomplished. Note that the current output cannot be calculated until the current input is measured. If for example the time step is one day the output for the day cannot be calculated until the end of the day. Only if the actual input can be measured well in advance of its arrival, or the delay in the system response is
long compared to the time step, can this be considered a
“prediction” technique.
A representation of the behavior of the ring current in terms of linear prediction filters is motivated by a consideration of the physical processes that produce the surface magnetic fields. According to the D-P-S relation, D st
is directly proportional to the total energy in the drifting ring current particles [ Dessler and Parker, 1959 ; Sckopke,
1966]. This implies that the D st
(a negative quantity) becomes more negative when energy is injected and less negative when energy is lost. It has been found that injection is proportional to the solar wind electric field and decay is proportional to the strength of D st
.
Burton et al.
[1975] expressed these facts with the following equation. dD
st dt
Q ( t )
D st
(2)
The quantity D st
* is the component of the measured D st index that is caused by a symmetric ring current. However it is well known that measured D st
is a superposition of the effects of the ring current, the disturbed magnetopause current, and the quiet time ring current present when the baselines for the magnetic perturbations are determined.
These facts are summarized by the relation
D st
D st
b p
c (3)
Here p is the dynamic pressure of the solar wind, b is the constant of proportionality relating changes in D st
to changes in pressure, and c is the effect of the quiet time magnetopause. If we substitute this relation into equation
2, approximate the time derivatives with first differences, and rearrange terms we obtain
D st
t
D st
b
b t
p
Q ( t )
c
t
(4)
The dependent variable in this difference equation is
D st
while D st
,
p,
p, and Q(t) are independent variables. The coefficients of the equation are
, b, c , and whatever constants are required to describe the input function
Q(t). Measurements at a specific time define one instance of the relation between the dependent and independent variables. Taking many successive measurements we obtain an over-determined set of equations for the unknown coefficients. Burton et al. [1975] assumed that all of these coefficients were constants independent of the state of the system and determined each constant separately by a different method. Their most important result was that Q(t) was a linear function of the solar wind electric field, i.e.
Q(t) =
VBs . Below we assume that injection is an arbitrary function of the solar wind, i.e. Q(t) = A(VBs).
We then show that this is a linear function except for details near VBs = 0 .
The work of Klimas et al.
[1998] and Vassiliadis et al.
[1999a] makes quite different assumptions about both the form of the differential equation and the constancy of the coefficients. Instead of using a single feedback term they use two ( a
1
and a
2
). This is equivalent to a second order differential equation where a
1 can be interpreted as the damping constant and a
2
as the resonant frequency of the system. They also assume that the coefficients depend on the state of the system. The two papers differ in how they localize the ARMA filters, but both assume that the state of the system depends on three variables: D st
, dD st
/dt , and
VBs . Klimas et al.
[1998] neglect the pressure correction to D st
. Vassiliadis et al.
[1999b] makes this correction prior to calculating the state-dependent filter coefficients obtaining coefficients b and c that change with season. The authors justify the use of the second order equation by the observation that the D st
index appears to oscillate after pressure pulses and during the main phase decrease.
In this paper we continue to use the Burton equation (2) because we see no compelling theoretical reason to believe that the symmetric ring current should display oscillatory behavior. Also, how well the Burton equation with state dependent coefficients is able to explain the behavior of the ring current has not been established. Finally, our use of hourly averages precludes observation of any oscillations shorter than two-hour period, and this is the order of the oscillations reported by Vassiliadis et al.
[1999a]. Our work also differs from that of Klimas and Vassiliadis because we assume that the system’s state is defined only by the solar wind electric field, VBs.
A justification for our view is provided by our previous work described in O'Brien and McPherron [2000a]. In this work we used a new statistical procedure that does not involve linear filters to study the validity of the Burton equation. The entire 37-year history of solar wind measurements was examined creating a sequence of joint probability distributions corresponding to fixed bins of VBs . Each distribution shows the probability of a particular
D st
given a specific D st with VBs essentially constant. In each distribution we fit the median
D st
versus D st
to a polynomial in
D st
.
The fits are almost precisely straight lines. The slope and intercepts of these lines depend on VBs allowing us to obtain analytic fits to the parameters of the Burton equation. The absence of any quadratic or higher terms in the polynomial fits implies that throughout the D st
-
D st
D st is a linear function of D st phase space. This is precisely the relation implied by the Burton equation!
3. ANALYSIS METHOD
Justified by our previous experience we continue our examination of the Burton equation with linear filters as expressed in (4). However, we now assume that the unknown parameters in this equation are functions only of VBs . We
thus divide the 37-year history of solar wind observations into subsets characterized by specific intervals of VBs . For each bin
, b, c, and A(VBs) are assumed constant. This fact complicates the solution of (4) because the coefficients are then constrained by linear relations between them, e.g. the coefficient for D st
is fixed, while other coefficients are related to this one. If we ignore this fact for a moment (4) can be written in the form
D st
D st
p
p
(5)
In this equation D st
and
p are scalar time series with one-hour time resolution. The first differences of these
[
D st
and
p] are easily calculated with due consideration for flags denoting missing records. Equation 5 with fixed coefficients applies to every unflagged hourly record in each subset of the data. This collection of records defines an over-determined set of equations for the unknown coefficients. Unfortunately, the coefficients are not independent because the unknown
relates them. However, if we fix
which is possible since VBs is fixed,
then the coefficients are related by linear constraints. We can use either constrained least square or nonlinear optimization techniques to obtain the solution for the unknown parameters.
The two methods give identical results. It should be emphasized, however, that the parameters cannot be treated as independent in a standard least square analysis. The constraints produce a significant correction.
3.1. Solution for Southward IMF
To define the filter coefficients for southward IMF we must define a set of VBs bins. If these are too narrow then a stable solution cannot be obtained. We find by experience that 100 or more records are needed to accurately define the coefficients for a specific VBs bin. However, the extreme values of VBs that create large storms are so rare that it is impossible to obtain this many records for values of
VBs exceeding 10 mV/m. We have used a set of bins of increasing width as the magnitude of VBs increases to partially compensate for the decreasing probability of a given
VBs . Even so, the extreme bins are quite wide and the calculated model coefficients are highly variable and somewhat suspect. In spite of this problem the coefficients display a systematic dependence on VBs .
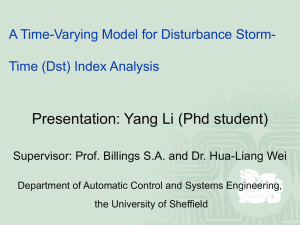
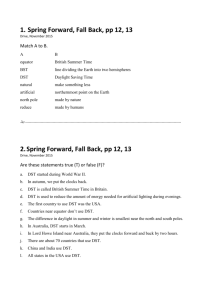
Figure 1 presents four panels displaying graphs of various parameters as a function of VBs . The top left panel contains the rate of ring current injection as a function of
VBs . The rate is clearly a linear function of VBs as shown by the straight line fit. The slope of this line,
(4.65 nT/hr)/(mV/m), is close to the value obtained in previous studies. The top right panel presents the ring current decay rate versus VBs . This rate decreases exponentially from about 15 hours with northward IMF to approximately
Figure 1.
5 hours when VBs is greater than 10 mV/m. An analytic fit to this curve is shown in the graph. The form of this function was derived from physical arguments by O'Brien and
McPherron [2000a], but the parameters were determined by nonlinear inversion from the data plotted here. The bottom left panel shows the pressure constant versus VBs .
This function also decreases exponentially from its value for northward field (>8 nT/
(nP) ) to a value close to 2. An arbitrary function has been fit to the data with the results shown in the graph. The fourth panel shows the number of records used to determine the coefficients for each VBs bin.
For the most extreme bin near 20 mV/m there were only 10 occurrences in the 37 years of data.
3.2. Calculation of the Ring Current Injection Function
Previous work suggests that the rate of injection into the ring current and its rate of decay are controlled by solar wind VBs [ Burton et al., 1975; O'Brien and McPherron ,
2000a]. This assumption allows us to combine the injection function Q(t) = A(VBs) and the quiet magnetopause correction ( c
t
) into a single term in the regression equation
(4). We then sort our data into bins of constant VBs and use the data from each bin to determine the coefficients of the
regression equation. The results plotted in Figure 1 indicate
that the offset term,
VBs
, in (5) is nearly a linear function of VBs . The injection function, A(VBs) can be calculated from the offset,
, using the equation
A ( VB s
)
( VB s
)
c
t
( VB s
)
(6)
If we assume that there is no ring current injection for northward IMF, i.e. A(VBs=0) = 0, then the constant c in
(6) can be determined from our regression coefficients. We find c =
(0)/
t = -4.6 nT.
Substituting this value into
(6) gives us an equation for A(VBs), for any value of VB s.
Because of the nonlinear dependence of
on VBs this equation is clearly nonlinear. However, note that the magnitude of the magnetopause correction term is always less than 1.0 while the offset ranges from 0 to 100. Thus the offset is important only near VBs = 0. Elsewhere A(VBs) is well approximated by the linear relation shown in the figure. Despite this, any small departure from linearity near zero is important. A linear fit to A(VBs) intercepts the VBs axis at 0.53 (mV/m). Using the linear fit for smaller values of VBs implies VBs causes a loss of energy from the ring current. Thus, as did Burton et al.
[1975] we introduce a cutoff electric field Ec = -0.53 mV/m so that for weaker fields we set A(VBs) = 0. A better approximation would be to use a polynomial fit in the interval 0.0 to 1.0 mV/m.
3.3. Quality of the D st
Predictions
Solutions for the ARMA filter coefficients may be used for each VBs bin are given by
D st
( X ) c where (X) is bles in (5), and c is the vector of coefficients dependent on VBs . Using the collection of solutions calculated for all
VBs bins we can generate a time series of compared to the observed
D st
D st
that may be
. This change may then be added to the current value of the observed D st
to predict the next D st
. Note that this prediction utilizes the observed D st and solar wind parameters for each hour. This procedure is referred to as one-step prediction.
A scatter plot of the predicted
D st versus observed D st shows a correlation of only 0.606. This average translates to a prediction efficiency of only 37%. This means that most of the variance in
D st is not predictable! None-theless, when the predicted change is added to the current measured D st
, the predicted D st
for the next hour agrees with the observed with a prediction efficiency of order
99%. The reason for this is that most of the predicted D st consists of the currently observed D st
so that the next D st
is very close to that observed. This one-step prediction accuracy has little meaning since in an operational situation measured D st
values are not available. Operationally we must perform multi-step predictions as discussed in the next section.
3.4. Multi-step Prediction of D st
Using Analytic Fits to
Model Coefficients
A multi-step prediction is achieved by integrating the regression equation (5) from a known initial condition. First expand
D st to obtain
D st
( n
1 )
( 1
) D st
( n )
p
p
(7)
If we start with a known value of D st
, now available within about 24 hours, we can integrate forward in time to the current time. In this integration we “feedback” the previous prediction to calculate the next
D st
that is added to the previous prediction to obtain the next D st
. This is referred to as multi-step prediction and provides a much more stringent test of the model. Once the integration reaches the current time it can be advanced only as fast as data on the input are acquired. In this integration we use the analytic fits to the various coefficients rather than the tabular results of modeling. This assures more continuous change in the coefficients as the state of the solar wind changes.
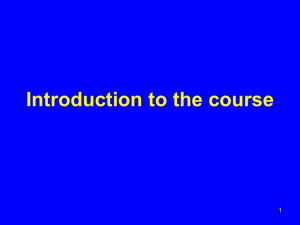
Figure 2 presents illustrations of the results from this in-
tegration. Each panel contains a short segment of continuous solar wind data that has been integrated starting from a
Figure 2
measured value of D st
. Unfortunately, the main problem in predicting geomagnetic activity is the presence of frequent gaps in the solar wind input data. To perform the integration across such gaps it is necessary to assume the behavior of the solar wind. These assumptions are almost always wrong and introduce large errors in the predicted time series. It takes many hours for the prediction to converge back to the correct solution. To avoid this problem here we have scanned the entire 37-year record identifying all intervals with 12 or more hours of continuous data. For each of these intervals we start the integration with the known value of D st
and integrate to the end of the interval using feedback of the prediction. This technique allows us to determine the best possible prediction efficiency for the method. The four examples were selected by the requirement that the interval contain more than 100 hours of data, and the prediction efficiency for these intervals exceeds
89%. Thus the four intervals are the best possible illustrations of the quality of the predictions. Three curves are plotted in each panel: the observed D st
, the 1-step prediction, and the multi-step prediction. The 1-step prediction is indistinguishable from the original. The heavy line shows the multi-step prediction is also very close to the observed index for these intervals.
The average correlation for the entire data set is 0.872 corresponding to a prediction efficiency of 76%. The rms error of the prediction relative to the data is only 10.6 nT!
This is close to the expected error in D st
produced by a variety of problems in its generation. It is also better than the second order fits obtained by Vassiliadis et al.
[1999a] assuming that the coefficients depend on D st
,
D st
, and
VBs . However, this comparison is somewhat misleading since they use 5-minute data that contains considerable more variance than does hourly data.
4. DISCUSSION AND CONCLUSIONS
In this paper we have developed an algorithm for predicting the hourly D st
index from upstream observations of the solar wind. Our technique is an extension of the work of Burton et al . [1975] who derived a simple first order differential equation for D st
based on physical principles.
This equation equates the rate of change of pressure corrected D st
to the difference between injection by the solar wind and decay by charge exchange. Burton et al.
[1975] assumed that all coefficients in the differential equation were constant with time and state of the magnetosphere, and then determined their values empirically from small datasets of 2.5-minute data. They demonstrated that an integral of the equation from a known starting value, driven by measured inputs, provided a good fit to the data and could be used as a forecast tool provided real time observations are available.
It is extremely difficult to compare our results to those obtained by earlier workers. Some have used higher time resolution, most have used smaller datasets, often authors consider only a fixed point in the solar cycle, in some cases they have used a second order differential equation (more coefficients in the filters), and different methods of localization. Others have used alternative solar wind coupling functions. Pressure correction are often ignored or not determined self-consistently with estimates of the ARMA coefficients. A comparison of our prediction efficiency
(~76%), or rms error (~11 nT), with values quoted in previous papers suggests our method is equal or superior to others. However, comparison with 5-minute D st
predictions are misleading because these data have higher variance and are therefore more difficult to predict. On the other hand, other models use more parameters than does ours so that should improve the quality of their fits.
Our results show that both the ring current decay time and the dynamic pressure coefficients depend on the strength of the solar wind electric field. The dependence of
on VBs is consistent with previous reports that claim that it is much shorter during the main phase than in the recovery phase. O'Brien and McPherron [2000a] have suggested this variation is a consequence of changes in location of the inner boundary of convection and the charge exchange decay rate relevant to this location as a function of VBs.
The exponential decrease of b with VBs may have a simple explanation. As VBs increases a stronger tail current is closer to the Earth. An increase in dynamic pressure will increase the tail field thus increasing the tail current. The effect of this current on the Earth is opposite to that of the magnetopause current and so partially compensates for the increase caused by an increase in the magnetopause current. Let us assume that the pressure contribution to D st
is the difference between the effects of the magnetopause and magnetotail, and that the effect of the magnetopause does not change with VBs .
D st
Magnetopau se
Magnetotai l
D st
b
MP
b
MP p dyn
b
Tail
b
Tail
p dyn p dyn
b ( VBs ) p dyn
Our value for b(VBs) during northward field is smaller than the value expected theoretically (8 rather 16 nT/
(nP) ) suggesting that at quiet times the contribution to D st
from the tail is half that expected from the magnetopause. When
VBs reaches –20 mV/m, b(VBs) appears to be about 2. If this is the correct explanation of the apparent change in b then the tail current must affect D st
far more than previously realized.
In conclusion we believe that we have improved our ability to predict the hourly D st
index from upstream data.
The algorithm is simple, involving only three parametric relations for the coefficient dependence on the solar wind
electric field. The method requires continuous tracking of the solar wind and that the data be transferred to the Earth in real time so as to provide sufficient time delay to allow a calculation of the next hourly value prior to the end of the hour. A version of this algorithm has been implemented at www.igpp.ucla.edu/swcgag/. A predicted D st
index is updated hourly and past values are compared to the Kyoto
Sym-H index for validation. A brief description of the real time algorithm will appear in O'Brien and McPherron
[2000b].
Acknowledgments . The authors would like to acknowledge frequent helpful discussions of the D st
prediction problem with A.
Klimas, D. Vassiliadis and T. Detman. This work has been supported by grants from the NSF under the space weather prediction program [NSF ATM 96-13667 & NSF ATM 99-72069].
REFERENCES
Burton, R.K., R.L. McPherron, and C.T. Russell, An empirical relationship between interplanetary conditions and D st
,
J. Geophys. Res.
, 80 (31), 4204-4214, 1975.
Dessler, A.J., and E.N. Parker, Hydromagnetic theory of magnetic storms, J. Geophys. Res.
, 64 (12), 2239-2259, 1959.
Klimas, A.J., D. Vassiliadis, and D.N. Baker, D st
index prediction using data-derived analogues of the magnetospheric dynamics, J. Geophys. Res.
, 103 (A9), 20,435-20,447,
1998.
O'Brien, T.P., and R.L. McPherron, An empirical phase-space analysis of ring current dynamics: solar wind control of injection and decay, J. Geophys. Res.
, 105 (A4), 7707-
7719, 2000a.
O'Brien, T.P., and R.L. McPherron, Forecasting the ring current index D st
in real time, JASTP , in press, 2000b.
Reiff, P.H., and J.G. Luhmann, Solar wind control of the polarcap voltage, Solar Wind-Magnetosphere Coupling ,
1986.
Sckopke, N., A general relation between the energy of trapped particles and the disturbance field over the earth,, J.
Geophys. Res.
, 71 (13), 3125-3130, 1966.
Vassiliadis, D., A.J. Klimas, and D.N. Baker, Models of D st
geomagnetic activity and of its coupling to solar wind parameters, Phys. Chem. Earth (C) , 24 (1-3), 107-112,
1999a.
Vassiliadis, D., A.J. Klimas, J.A. Valdivia, and D.N. Baker, The
D st
geomagnetic response as a function of storm phase and amplitude and the solar wind electric field, J. Geophys. Res.
, 104 (A11), 24,957-24,976, 1999b.
_____________
R. L. McPherron and Paul O’Brien, Institute of Geophysics and Planetary Physics, University of California Los Angeles, Los rmcpherAngeles, CA 90095-1567 (e-mail: ron@igpp.ucla.edu
; tpoiii@igpp.ucla.edu)
FIGURE CAPTIONS
Figure 1. Graphs of the coefficients of the
Dst prediction equation (4) versus VBs . Parametric fits to the relations are shown in each panel. Clockwise from the upper left the panels present the offset (
in equation 5), the decay time
, the number of hourly records used to make the fits in each VBs bin, and the pressure constant b .
Figure 2.
A comparison of the waveforms of the modeled and observed changes in D st
. The four longest intervals of contiguous data with prediction efficiencies above 89% were selected for the illustration.
Figure 1.
Graphs of the coefficients of the
D st
prediction equation (4) versus VBs . Parametric fits to the relations are shown in each panel. Clockwise from the upper left the panels present the offset (
in equation 5), the decay time
, the number of hourly records used to make the fits in each VBs bin, and the pressure constant b .
Figure 2.
A comparison of the waveforms of the modeled and observed changes in D st
. The four longest intervals of contiguous data with prediction efficiencies above 89% were selected for the illustration.
PREDICTING D st
PREDICTING D st
PREDICTING D st
PREDICTING D st
PREDICTING D st
PREDICTING Dst
McPHERRON AND O’BRIEN
McPHERRON AND O’BRIEN
McPHERRON AND O’BRIEN
McPHERRON AND O’BRIEN
McPHERRON AND O’BRIEN
McPHERRON AND O’BRIEN
Figure 1
VBs COUPLING CONSTANT
0
-20
Off=-4.65VBs -0.05
-40
-60
-80
0 5 10 15
PRESSURE CONSTANT
20
12
10
8
6
4
2
0
0 b=2.26+9.47
5 10 e
-VBs/2.40
15
<VBs > (m V/m )
20
10
0
0
15
DECAY TIME
3.81
e
( 4.16/( 3.27+VBs))
10
5
0
0
10
5
5 10 15
DATA STATISTICS
20
5 10 15
<VBs > (m V/m )
20
50
23-Sep-1981 12:00:00
PEF=90.01
0
-50
50
01-Apr-1982 12:00:00
PEF=89.11
0
-50
Figure 2
-100
09/23 09/25 09/27
29-Mar-1973 21:00:00
09/29
0
-50
-100
-150
-200
-250
03/29
PEF=94.48
03/31
Date
04/02 04/04
-100
04/01 04/03 04/05
25-Nov-1978 09:00:00
04/07
0
-50
-100
Obs Dst
1-step Pred
N-step Pred
PEF=93.51
-150
11/24 11/26 11/28 11/30 12/02
Date