Computational_Science_Meeting_Design_Flip_Chart_2a
advertisement

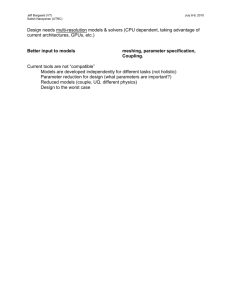
Jeff Borgaard (VT) Satish Narayanan (UTRC) Deep domain knowledge Blend in with existing practice Improve Energy Efficiency & productivity Data Reduction, ROM for risk analysis Reduce visualization data (leverage data fusion) Put in hands of all users Multi-resolution models Simplify to put in opt. cycle Shape functions (response surface) Dynamics & Control, Physics Especially dynamics Control not adequate for energy. Ok for comfort. July 8-9, 2010 Jeff Borgaard (VT) Satish Narayanan (UTRC) Scalable toolset Input BIM – model – solver network simulation (Robust) Mixed integer programming, couple feedback with CFD Leverage DOE technologies For example: Embedded optimization w/uncertainty UQ (mean, EC) Risk analysis (ASCR interest) Bridge long range algorithm develop with application Algorithms that perform well when cycle limited Analysis tools couple w/sensor data Experience 1st person in building Building studio (cloud-based) July 8-9, 2010 Jeff Borgaard (VT) Satish Narayanan (UTRC) Look at Building Simulation Journal for current state in Building Simualtions Leverage DOE Develop for users Get input from multiscale/multiphysics CSE community Couple to ROM (workforce development) Current practice (rule of thumb) Communication between all parties HPC should be used by small/med bus. (OSTP project in modeling & Simulation) Links to come Buildings are different! HPC + math challenges Occupants Interaction w/grid Design for worst case Hierarchy of models July 8-9, 2010 Jeff Borgaard (VT) Satish Narayanan (UTRC) July 8-9, 2010 Problem Bridging gap from short long time scales Identify key dynamic behaviors & model that affect end performance Fluid flow network coupling with (thermal) indoor environment and related controls (switching….) Visualization for design/decision making Identify relevant dynamics & failure [forensics control design] modes Optimal control design from analysis/model, ID (dynamical invariants) Coupled structure – thermal simulations Develop model-based estimates, optimal sensor placement strategies. Propagation across multiple scales for UQ, sensitivity analysis (compute “chains of influence”) (how to do this in high-fidelity simulation environment?) Compute stability regions for modes/behaviors “integration of UQ capability into multi-scale code” [research question] Jeff Borgaard (VT) Satish Narayanan (UTRC) July 8-9, 2010 Specifics R&D Investments Multiscale Modeling & Simulation Dynamics Deliverables Model dynamic behaviors important to energy performance. Visualization for practitioners o Fault tolerance Simulation to support opt. control Robust placement of sensors Uncertainty, sensitivity, adjoint propagation across hierarchy of models new methodologies Simulation code w/sensitivity adjoint, uncertain quantification capabilities embedded within them. Jeff Borgaard (VT) Satish Narayanan (UTRC) July 8-9, 2010 Need (mid-term) Macro– micro–building climate… Analysis tools for decision making Methodology tools for doing analysis (of energy impact) (decision making) from “design models” Approach Large-scale coupled structural – thermal simulations Separation of concerns via modeling Optimization tools for massing (lumped analysis) Benefit Early decisions on siting/orientation/shell] Have large impact on energy efficiency Effectiveness of modeling & anal. (turnaround time for model building & analysis) Need (Long term) Need/Problem Controls design (Models) / Robust Building operation UP & UQ within modeling toolchain Multi-scale model extraction from simulations System decomposition to separate time scales & enable modeling (ROMs) Jeff Borgaard (VT) Satish Narayanan (UTRC) Timeline: July 8-9, 2010 (examples of large & small comp. benefits from HPC) Model markup (Structural, Thermal, climate, orientation) Through hierarchy Coarse thermal Select scenarios by: cost, time, energy Optimization Incorporate operational aspects HVAC choices Risk assessment for high performance designs Jeff Borgaard (VT) Satish Narayanan (UTRC) July 8-9, 2010 Long-Term Multiscale/Multiplysics Modeling Dynamic effectiveness of controls Better integration w/data Robust control Uncertainty propagation Level of abstraction when writing the models Discrete events Gradient-based opt. System decomposition by graph analysis Embedded vs Sampling, UQ in algorithm design Coupling models -CS - what data is sufficient -math - coupling conditions Coupling the hierarchy Multi objective optimization: energy cost, comfort | Discontinuous right hand sides in the ROM | | ----------| | Multiscale optimization, integer programming |___________________________ ---------------Energy/Comfort vs $ New Workforce Need – Benefit Trade-off Implementation in embedded systems On – off line Algorithms for next generation hardware; GPU clusters Climate (regional) forecasts Time & space For wind-farms (dual use) Leverage existing weather models Pedestrian - wind tunnels