Arctic Demo Overview
advertisement

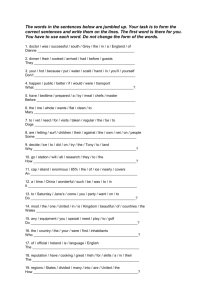
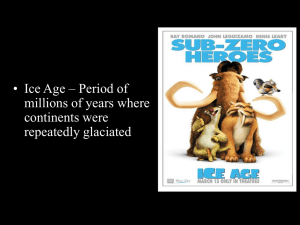
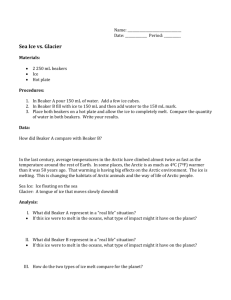
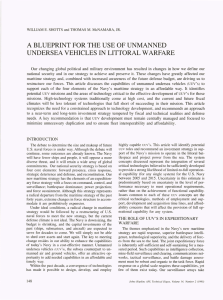
2013 RDC Arctic Shield Operation Spilled Oil in Ice Recovery Technologies Demonstration Updated 30 May 2013 Overview: The demonstration will consist of utilizing Commercial-Off-The-Shelf (COTS) and Government-Off-The-Shelf (GOTS) technologies, from a the USCG Icebreaking Cutter HEALY to demonstrate the ability to respond to oil spills in the Arctic. Five key process activities in oil spill response in the Arctic will be tested; search above and below an ice flow, detect spilled oil, produce data to be used to plot the safest course to the spilled oil, deploy a brushed skimmer to recover the spilled oil and monitor the recovery operation (above and below the ice) to ensure complete recovery. Four specific components will be evaluated including Unmanned Aircraft System, Unmanned Underwater Vehicle, Oil Recovery Skimmer and Remotely Operated Vehicle. A fifth component , general communication support ,will also be evaluated. Testing and validating these 5 components effectiveness in Arctic conditions is vital in defining and developing resources to meet Coast Guard’s increasing Arctic mission which coincides with the expanding navigational waters in the Arctic. Search Above & Below Ice Flow Detect Spilled Oil Component Decision Making Data to Respond to Spill Safely Recover Spilled Oil With Feedback of Effectiveness Ensure Complete Recovery 1 - Unmanned Aircraft System Component 2 - Unmanned Underwater Vehicle Component 3 - Brushed Skimmer Component 4 - Remotely Operated Vehicle Component 5 - General Communications 1 Component 1 – Unmanned Aircraft System To search, detect, and map the ice flow from above, small Unmanned Aircraft Systems (sUAS) will be used. This demonstration will use two Pointer Upgraded Mission Ability (PUMA) small Unmanned Aircraft (UA). A National Oceanic and Atmospheric Administration (NOAA) operated PUMA will be flown by two NOAA operators. The second PUMA with operator and technician will be provided by the University of Alaska, Fairbanks (UAF). UAF is funded by The Center for Island, Maritime, and Extreme Environment Security (CIMES), a Department of Homeland Security (DHS) Science and Technology (S&T) Directorate’s University of Excellence program center. One UAS will focus on detection and tracking of the oil and the second will focus on providing navigational information for vessel movement in and around the ice. Potentially a third UAS from UAF will be launched from shore to conduct long range surveillance in support of the demonstration. UAF team estimated at 5 people and the NOAA support team is also 5 people. Component 2 - Unmanned Underwater Vehicle To search, detect, and map the ice flow from under the ice, an Unmanned Underwater Vehicle (UUV) will be used. This demonstration will use the SeaBED UUV operated by Woods Hole Oceanographic Institute (WHOI). The UUV and the support team will be funded by the Bureau of Safety and Environmental Enforcement (BSEE). The UUV support team is estimated at 4 personnel. Component 3 - Brushed Skimmer System To recover the oil, a brushed skimmer system will be used. The brushed skimmer, control equipment, and operating crew will be provided by the Coast Guard National Strike Force. The components are part of their Vessel of Opportunity System (VOOS). The Skimmer support team is estimated at 5 personnel. Component 4 - Remotely Operated Vehicle To monitor recovery progress and completeness, a Remotely Operated Vehicle (ROV) will be launched. The ROV will be a VideoRay Pro 4 and supplied by PAC AREA, Deployable Specialized Forces Section, PAC-331A. The ROV will be operated by USCG Research and Development Center (RDC) staff. The ROV support team is estimated at 2 personnel. Component 5 – General Communications. Communication plans in every large contingency event documents communication challenges. Conducting research in the Arctic allows for additional testing of general communications. RDC 2 will develop communication plan, evaluated reliability of the plan and equipment, and document strengths and weaknesses to assist with general policy and guidance to assist in improving communication reliability in Arctic conditions. Video documentation support will also be provided to the CG Motion Picture (CG MOPIC) Office sponsored camera crew that will be riding with the Demonstration team. They are capturing imagery for a documentary series slated for airing in 2014. Primary Objective: An oil spill in the Arctic is a growing risk with increasing operations in the Arctic, both from increased ship traffic and resource exploration and extraction. The primary goal of the RDC effort is to demonstrate the capabilities of available technologies to successfully recover spilled oil in and around Arctic ice or ice flows. An ice flow is defined as ice broken up by wind, sea, swells, currents and tides. It has various names depending on the size, including small (65.5 ft-328 ft across), medium (328-1640 ft), big (1640 ft–6562 ft), vast (6562 ft–32,809 ft) and giant (more than 32,809 ft). This demonstration will utilize an ice flow of opportunity. The demonstration will also show what, if any, limitations and/or issues the Arctic environment creates for the technologies being used. Figure 1: Over view of proposed demonstration 3 Secondary Objectives: 1. sUAS 1.1. Conduct additional flight operations to monitor for Arctic wild life. 1.2. Conduct dual linked sUAS ops to extend patrol range. 1.3. Conduct search pattern flight ops. 1.4. Make determinations in the following areas: 1.5. Does the sUAS enhance the Coast Guard’s capabilities to perform their eleven statutory missions by increasing situational awareness (SA)? 1.6. Is the sUAS operationally suitable for Coast Guard missions? 1.7. Is the sUAS suitable for operation in the National Airspace System (NAS)? 2. UUV 2.1. Conduct additional under ice operations. 2.2. Conduct bottom inspection under ice operation. 3. Skimmer 3.1. Conduct additional skimming and capture video of hydrodynamics at ice edge. 3.2. Conduct additional skimming and capture hydrodynamics at Ship/ice interface. 4. ROV 4.1. Conduct video capture of UUV ops. 4.2. Conduct video capture of Skimmer ops. 4.3. Conduct additional ops at ice edge. 4.4. Conduct ops to support MOPIC needs 5. General Logistics - Communications 5.1. Insure demo comms are available. 5.2. Have data readily available to Bridge OOD. 5.3. Refine required comms TTP for actual event 5.4. Have data transmitted to shore ‘command center’. Schedule and Key Focus: The demonstration will take place between September 7 and September 14, (eight days). Actual operational hours will be dependent on weather and available daylight. Daylight hours for September are shown in figure two, (approximately 0630 to 2000). Onboard operational time will be maximized within safe operating protocols. Night ops are an option for this demonstration. Time should be allotted at the start and the end for equipment unpack and repack. These activities can be accomplished during transit to and from the ice. 4 Figure 2 Available daylight for Barrow in September Projected Timeline Sept 7 – Personnel transfer to the HEALY from Barrow (in conjunction with HLY1302 off load). Begin on cutter inspection of equipment to insure integrity after transit and make any repairs that may be required. Begin transit to agreed upon ice. Sept 8 – Focus will be on transiting to the ice and the unpacking and staging of all equipment that was brought to the Arctic. Begin operation of technologies and establishing comms. Sept 9 – Complete equipment checks then conduct a complete search, detect, map, maneuver into ice, recover and monitor operation. Make any changes needed to smooth out operation. Afternoon will repeat with those changes and or variations of the exercise. Sept 10 – If needed, morning will be another complete search, detect, map, maneuver into ice, recover and monitor operation. Make any changes needed to smooth out operation. Afternoon will repeat with any changes and or variations of the exercise. Sept 11 – 14 Continue operations (variations or initiate secondary objectives). Sept 15 – Hot wash. Conclusion meeting for CO’s and operators provide comments for lessons learned. Begin repack equipment. Sept 15 –thru 21 can be additional ops and equipment pack days and transit to Seward, AK for offload 5 General Logistical Information: Geographical: Ice Edge Figure three is the location of the ice edge for September. It is based on the average of 35 years of data. Figure 3 - Ice edge for September in the Arctic Logistic Requirements on site: UAS recovery operation will require a small boat or ice access. UUV will require a crane/A-frame for deployment. UUV will require a small boat for recovery. Skimmer will have independent prime mover for hydraulic needs. Skimmer, UUV, UAS and ROV will need to define electrical requirements. (Naval Engineering/ Ship Engineering Dept) Skimmer will need a ships crane service throughout its deployment. 6 ROV will need deck space for cable and cable tending near the skimmer and UUV ops. All systems need technology plans that detail all operational, power, and foot print requirements. Also specifying any additional operations the team would like to complete if time permits. UAS and UUV - Determine if data software has mosaic capability for building digital maps. Load Out and Personnel transfers: Cutter/Air Support: USCG Buoy Tender CGC MAPLE (WLB-225) – Originally requested but resource not currently available due to SEQUESTRATION resource limits. USCG Icebreaker CGC HEALY – Planning meeting and ship check will be held May 7th and 8th in Seattle. Anyone providing equipment should have a representative at this meeting. Equipment load out will be July 1st dock side in Seattle unless other arrangements have been made. A secondary option is July 27/28 in Dutch Harbor. No equipment is to be transferred from Barrow to the HEALY via helo. Personnel will be transported out to the ship via commercial helicopter from Barrow in coordination with the National Science Foundation’s demobilization of scientists from their second science mission (HLY 1302). Test personnel will transit south on the HEALY to Seward to travel home from there. Equipment can be offloaded in Seward or remain onboard for the transit to Seattle for off load in October. USCG Air Support If CG airframe was operating in the area, it was originally requested for support to document exercise. Due to time of year, location, and SEQUESTRATION no CG airframe support is aligned to this research evolution at this time. Personal Protective Equipment: The location of the demonstration is the coastal area off the north slope of Alaska in the Arctic ocean during the month of September between the 8th and 14th. Operations will be held near or in Ice flows. Water temperatures will be in the 30 degree range and air 7 temperatures in the 20 to 40 degree range. At the ice flow, the air temperature is colder than the ambient air in the general area. This demo will require working outdoors in and area where anyone could get wet. Appropriate personal protective gear is required. If you are planning on riding a small boat, or getting out on the ice, you must have a dry suit. If you are planning on working on deck, steel toed work boots are required. CGC HEALY will provide all other PPE i.e. hard hats, mustangs, etc. List of POCs and Team Personnel (Separate excel sheet) Technologies: Component 1 sUAS – Pumas – Supplied by NOAA and the University of Alaska, Fairbanks through the Department of Homeland Security, Science and Technology University of Excellence program; the Center for Island, Maritime, and Extreme Environment Security. The Puma is hand-launched and has a fully automatic deep-stall near-vertical recovery, and flies its missions typically at altitudes of 300-1000 ft above ground and at speeds of about 15-31 mph. Photos: AeroVironment Inc. Specifications for Puma: Length: 5.9 ft Wingspan: 8.5 ft Weight: 9.9 lbs Speed: Max – 60 mph; cruise - 15 to 31 mph 8 Ceiling: 12500 ft Range: 9 miles Endurance: Primary Battery - 4 h; Rechargable battery - 3 h Propulsion: Electric motor 600 W Place holder for ScanEagle UAS Component 2 UUV – SeaBED - supplied by the Woods Hole Oceanographic Institute through the Bureau of Safety and Environmental Enforcement. SeaBED’s twin-hull design stands in stark contrast to that of most commercial "torpedoshaped" AUVs, but provides greatly enhanced stability for low-speed photographic surveys. SeaBED is approximately two meters long and weighs nearly two-hundred kilograms. The vehicle has two main pressure housings, containing the electronics and the batteries. The electronics are located in the top hull, and connected to the batteries and sensors in the bottom hull, by wet cabling routed through the vertical struts. Deployments of SeaBED in Ice Specifications for SeaBED Physical Specs Platform: SeaBED Download PDF 9 Body Type: Open Space Frame Size (LxWxH): 1.90m x 0.34m x 1.50m Body Size (LxWxH): 1.90m x 0.34m x 0.34m Hull Material: Aluminum Weight: 250.00kg Maximum Depth: 2,000.00 m Dynamic Buoyancy: No Self-Righting: Yes Obstacle Avoidance: Yes Endurance (nominal load): 8 hours Manufacturer Website: Link Vehicle Power: 2kWHr/6kWHr Li Ion Rechargeable Batteries Sensors – Vary with mission Navigation Equipment Sensors: An RDI 1200 kHz DVL, iXSea Octans FOG, LBL/USBL navigation Navigation Pressure Transducer: Paroscientific Depth Sensor Surface Communications: RF radio modem with minimum range of 2 km Acoustic Communications: 10 kHz Band-A Acoustic Modem CTD Sensors: Seabird pumped model 49 CTD Fastcat Camera: 1,4,11 Megapixel, 12 bit dynamic range Gigabit Ethernet camera with associated strobe Multibeam: Imagenex Delta-T multibeam system Shipping/storage container: WHOI AUV will arrive in 4 cases inside 20' ISO container 1,200 lbs 1) 94"x35"x28" 2) 48"x42"x32" 3) Jetkayak (Optional) for recovery 4) Computer Equipment 10 Component 3 Brush Skimmer – Supplied by the National Strike Force, funded by the CG RDC Place holder for CG brush skimmer Shipping/storage container: ISU90 CONTAINER : 108" L X 88"W X 92" H @ 10,000 LBS. Component 4 ROV – VideoRay Pro 4 - USCG MSST and PAC AREA. The VideoRay Pro 4 is a small ROV that is completely computer driven by a platform called VideoRay Cockpit. With the Pro 4 ROV, "plug and play" capabilities can be added or subtracted with either a simple software update or a quick hardware add-on in the field. The hardware and/or features inlude vehicle autonomous control, the latest imaging sonar and positioning hardware and software, and a variety of other sensors and tools developed around the size and capability of the Pro 4. Standard in the vehicle is the 3D tilt compensated compass, Accelerometer, MEMS Gyro, a leak alarm, internal temperature gauge, and an operating volt meter. 11 VideoRay Remotely Operated Vehicle (tethered) ROV Specifications Submersible Demensions: (14.75, 11.4, 8.75 in) Submersible Weight: 13.5 lbs Speed: 4.2 kts Thrust to vehicle weight ratio: 2:1 Depth rating: 1000 ft Additional Research Opportunities: 1. If available, a third UAS (greater payload/longer endurance) will be launched from shore and integrated into the exercise. Command and control of the large UAS will transfer from shore to the ship during the all phases of operations with the exception of launch and recovery. This will depend on the location of available ice. Goal of this optional testing will be to evaluate the transfer of control of UAS shore to ship, this is anticipated future activity projected as a cutter may be on scene of oil spill response initially without a deployed UAS. When a UAS is resourced it will be transferred from shore to ship. The ability to transfer UAS shore to ship in air may reduce response time and allow ship to remain on scene. 2. Depending on availability of ships, coordinated exercise with multiple ships may take place. The ships include NOAA’s survey ship FAIRWEATHER, the Canadian icebreaker Louis S. St-Laurent, the South Korean icebreaker ARAON, and the CG buoy tender MAPLE. 12 13