Electrical discharge machining - Unsri
advertisement

Electrical discharge machining
dear
d34r123@yahoo.co.id
KOMUNITAS BLOGGER UNIVERSITAS SRIWIJAYA
Electrical discharge machining
An electrical discharge machine
Electric discharge machining (EDM), sometimes colloquially also referred to as spark
machining, spark eroding, burning, die sinking or wire erosion,[1] is a manufacturing process
whereby a wanted shape of an object, called workpiece, is obtained using electrical
discharges (sparks). The material removal from the workpiece occurs by a series of rapidly
recurring current discharges between two electrodes, separated by a dielectric liquid and
subject to an electric voltage. One of the electrodes is called tool-electrode and is sometimes
simply referred to as ‘tool’ or ‘electrode’, whereas the other is
called workpiece-electrode, commonly abbreviated in ‘workpiece’. When the
distance between the two electrodes is reduced, the intensity of the electric field in the
volume between the electrodes is expected to become larger than the strength of the
dielectric (at least in some point(s)) and therefore the dielectric breaks allowing some current
to flow between the two electrodes. This phenomenon is the same as the breakdown of a
capacitor (condenser) (see also breakdown voltage). A collateral effect of this passage of
current is that material is removed from both the electrodes. Once the current flow stops (or it
is stopped - depending on the type of generator), new liquid dielectric should be conveyed
into the inter-electrode volume enabling the removed electrode material solid particles
(debris) to be carried away and the insulating proprieties of the dielectric to be restored. This
addition of new liquid dielectric in the inter-electrode volume is commonly referred to as
flushing. Also, after a current flow, a difference of potential between the two electrodes is
restored as it was before the breakdown, so that a new liquid dielectric breakdown can occur.
Contents
1
History
2
Generalities
3
Definition
of the
technological
parameters
4
Material
removal
mechanism
5
Types
5.1
Sinker
EDM
5.2
Wire
EDM
6
Applications
6.1
Prototype
production
6.2
Coinage die
making
6.3
Small
hole drilling
7
Advantages
and
disadvantages
8
See also
9
References
10
External
links
History
The EDM process was invented by two Russian scientists, Dr. B.R. Lazarenko and Dr. N.I.
Lazarenko in 1943.
The first numerically controlled (NC, or computer controlled) EDM was invented by Makino in
Japan in 1980.
Agie launches in 1969 the world\'s first series-produced, numerically controlled wire-cut EDM
machine.
Generalities
Electrical discharge machining is a machining method primarily used for hard metals or those
that would be very difficult to machine with traditional techniques. EDM typically works with
materials that are electrically conductive, although methods for machining insulating
ceramics with EDM have also been proposed. EDM can cut intricate contours or cavities in
pre-hardened steel without the need for heat treatment to soften and re-harden them. This
method can be used with any other metal or metal alloy such as titanium, hastelloy, kovar,
and inconel.
EDM is often included in the ‘non-traditional’ or ‘nonconventional’ group of machining methods together with processes such as
electrochemical machining (ECM), water jet cutting (WJ, AWJ), laser cutting and opposite to
the ‘conventional’ group (turning, milling, grinding, drilling and any other
process whose material removal mechanism is essentially based on mechanical forces).
Ideally, EDM can be seen as a series of breakdowns and restorations of the liquid dielectric
in-between the electrodes. However, caution should be exerted in considering such a
statement because it is an idealized model of the process, introduced to describe the
fundamental ideas underlying the process. Yet, any practical application involves many
aspects that may also need to be considered. For instance, the removal of the debris from
the inter-electrode volume is likely to be always partial. Thus the electrical proprieties of the
dielectric in the inter-electrodes volume can be different from their nominal values and can
even vary with time. The inter-electrode distance, often also referred to as spark-gap, is the
end result of the control algorithms of the specific machine used. The control of such a
distance appears logically to be central to this process. Also, not all of the current flow
between the dielectric is of the ideal type described above: the spark-gap can be shortcircuited by the debris. The control system of the electrode may fails to react quickly enough
to prevent the two electrodes (tool and workpiece) to get in contact with a consequent short
circuit. And this is unwanted because a short circuit contributes to the removal differently
from the ideal case. The flushing action can be inadequate to restore the insulating
properties of the dielectric so that the flow of current happens always in the point of the interelectrode volume (this is referred to as arcing), with a consequent unwanted change of
shape (damage) of the tool-electrode and workpiece. Ultimately, A description of this process
in a suitable way for the specific purpose at hand is what makes the EDM area such a rich
field for further investigations and research. To obtain a specific geometry, the EDM tool is
guided along the desired path very close to the work, ideally it should not touch the
workpiece, although in reality this may happens due to the performance of the specific
motion control in use. In this way a large number of current discharges (colloquially also
called sparks) happen, each contributing to the removal of material from both tool and
workpiece, where small craters are formed. The size of the craters is a function of the
technological parameters set for the specific job at hand. They can be with typical
dimensions ranging from the nanoscale (in micro-EDM operations) to some hundreds of
micrometers in roughing conditions. The presence of these small craters on the tool results in
the gradual erosion of the electrode. This erosion of the tool-electrode is also referred to as
wear. Strategies are needed to counteract the detrimental effect of the wear on the geometry
of the workpiece. One possibility is that of continuously replacing the tool-electrode during a
machining operation. This is what happens if a continuously replaced wire is used as
electrode. In this case, the correspondent EDM process is also called wire-EDM. The toolelectrode can also be used in such a way that only a small portion of it is actually engaged
into the machining process and this portion is changed on a regular basis. This is for
instance the case, when using as tool-electrode a rotating disk. The corresponding process
is often also referred to as EDM-grinding. A further strategy consists in using a set of
electrodes with different sizes and shapes during the same EDM operation. This is often
referred to as multiple electrode strategy and is most common when the tool electrode
replicates in negative the wanted shape and is advanced towards the blank along a single
direction, usually the vertical direction (i.e. z- axis). This resembles the sink of the tool into
the dielectric liquid in which the workpiece is immersed, so, not surprisingly, it is often
referred to as die-sinking EDM (also called Conventional EDM and Ram EDM). The
correspondent machines are often called Sinker EDM. Usually, the electrodes of this types
have quite complex forms. If the final geometry is obtained using a usually simple shaped
electrode which is moved along several directions and is possibly also subject to rotations
often the term EDM-milling is used. In any case, the severity of the wear is strictly dependent
on the technological parameters used in the operation (for instance: polarity, maximum
current, open circuit voltage). For example, in micro-EDM, also known as μ-EDM, these
parameters are usually set at values which generates sever wear. Therefore, wear is a major
problem in that area.
Definition of the technological parameters
Some difficulties have been encountered in the definition of the technological parameters
that drive the process. The reasons are explained below.
On the one hand, two broad categories of generators, also known as power supplies, are in
use on EDM machines commercially available: the group based on RC circuits and the group
based on transistor controlled pulses. In the first category, the main parameters that a
practitioner may be expected to choose from at set-up time are the resistance(s) of the
resistor(s) and the capacitance(s) of the capacitor(s).
In an ideal condition these quantities would then affect the maximum current delivered in an
ideal discharge, which is expected to be associated with the charge accumulated on the
capacitors at a certain moment in time. Little control, however is expected to be possible on
the time duration of the discharge, which is likely to depend on the actual spark-gap
conditions (size and pollution) at the moment of the discharge. Yet, this kind of generators
can allow the user to obtain short time durations of the discharges relatively easier than with
the a pulse controlled generator. This advantage is however going to be diminished with the
progress in the production of electronic components.[2] Also, the open circuit voltage (i.e. the
voltage between the electrodes when the dielectric is not yet broken) can be identified as
steady state voltage of the RC circuit. In the second group of generators, based on transistor
control usually enables the user to deliver a train of pulses of voltage to the electrodes. Each
pulse can be controlled in shape, for instance quasi-rectangular. In particular, the time
between two consecutive pulses and the duration of each pulse can be set. The amplitude of
each pulse constitutes the open circuit voltage. In this framework, the maximum time
duration of a current discharge is equal to the duration of a pulse of voltage in the train. Two
pulses of current are then expected not to occur for a duration equal or larger than the time
interval between two consecutive pulses of voltage. The maximum current during a
discharge that the generator deliver can also be controlled. Design of generators different
from that described above is likely to be commercially available. Thus, the parameters that a
user may actually set on his own machine may be quite different and generator-manufacturer
dependent. Moreover, the manufacturers are usually quite reluctant to unveil the details of
their generators and control systems to their user base not to give a potential competitive
advantage to their competitors. And, conversely, the average users are usually more
interested in a ‘machine that can do the job’, rather than in through
understanding of the EDM process. This circumstance constitutes another barrier to the
attempt of describing unequivocally the technological parameters of the EDM process.
Moreover, the parameters affecting the phenomena occurring between tool and electrode are
related not only to the generator design but also to the controller of the motion of the
electrodes. A framework to define and measure the electrical parameters during an EDM
operation directly on inter-electrode volume with an oscilloscope external to the machine has
been recently proposed by Ferri et al.[3] These authors conducted their research in the filed
of μ-EDM, but the same approach can be used in any EDM operation. This would enable
the user to estimate directly the electrical parameter that affect their operations in an open
way, without relying upon machine manufacturer\'s claims. Finally, it is worth mentioning that,
quite unexpectedly, when machining different materials in identical nominal set-up conditions
the actual electrical parameters of the process are significantly different.[3]
Material removal mechanism
The first serious attempt of providing a physical explanation of the material removal during
electric discharge machining is perhaps that of Van Dijk [4]. In his work, Van Dijk present a
thermal model together with a computational simulation to explain the phenomena between
the electrodes during electric discharge machining. However, as Van Dijk himself admitted in
his study, the number of assumptions made to overcome the unavailability of experimental
data at that time was quite significant.
Further enhanced models trying to explain the phenomena occurring during electric
discharge machining in terms of heat transfer theories were developed in the late eighties
and early nineties. Possibly the most advanced explanation of the EDM process as a thermal
process was developed during an investigation carried out at TeXas A&M University
with the support of AGIE, now Agiecharmilles, a company with headquarters in Switzerland.
This stream of research resulted in a series of three scholarly papers: the first presenting a
thermal model addressing the material removal on the cathode [5] , the second, presenting a
thermal model for the erosion occurring on the anode [6] and the third introducing a model
describing the plasma channel that is formed during the passage of the discharge current
through the dielectric liquid [7]. Validation of these models is carried out also using
experimental data provided by AGIE. These models constitute the most authoritative support
for the claim that EDM is a thermal process, describing how the material is removed from the
two electrodes because of melting and/or vaporization processes in conjunction with
pressure dynamics established in the spark-gap by the collapsing of the plasma channel.
However, from a careful reading of these papers it emerges that for small discharge energies
the presented models are quite inadequate to explain the experimental data. Also, all these
models hinge on a number of assumptions, often taken from such disparate research areas
as submarine explosions, discharges in gases, and failure of transformers. So it is not
surprising that alternative models have been proposed more recently in the literature trying to
explain the EDM process. Among these, the model from Sigh and Ghosh [8] re-connects the
removal of material from the electrode to the presence of an electrical force on the surface of
the electrode that would be able to mechanically remove material and create the craters.
This would be made possible by the fact that the material on the surface has reduced
mechanical proprieties due to an increased temperature caused by the passage of electrical
current. The authors simulated their models and showed how they might explain EDM better
than a thermal model (melting and/or evaporation), especially for small discharge energies,
which are typically used in μ-EDM and in finishing operations. In the light of the many
available models, it appears that the material removal mechanism in EDM is not yet well
understood and that further investigation is necessary to clarify it.[3] Especially considering
the lack of experimental scientific evidence to build and validate the current EDM models.[3]
Types
Sinker EDM
Sinker EDM sometimes is also referred to as cavity type EDM or volume EDM. Sinker EDM
consists of an electrode and workpiece that are submerged in an insulating liquid such as oil
or dielectric fluid. The electrode and workpiece are connected to a suitable power supply.
The power supply generates an electrical potential between the two parts. As the electrode
approaches the workpiece, dielectric breakdown occurs in the fluid forming an ionization
channel, and a small spark jumps. The resulting heat and cavitation vaporize the base
material, and to some extent, the electrode. These sparks strike one at a time in huge
numbers at seemingly random locations between the electrode and the workpiece. As the
base metal is eroded, and the spark gap subsequently increased, the electrode is lowered
automatically by the machine so that the process can continue uninterrupted. Several
hundred thousand sparks occur per second in this process, with the actual duty cycle being
carefully controlled by the setup parameters. These controlling cycles are sometimes known
as "on time" and "off time". The on time setting determines the length
or duration of the spark. Hence, a longer on time produces a deeper cavity for that spark and
all subsequent sparks for that cycle creating a rougher finish on the workpiece. The reverse
is true for a shorter on time. Off time is the period of time that one spark is replaced by
another. A longer off time for example, allows the flushing of dielectric fluid through a nozzle
to clean out the eroded debris, thereby avoiding a short circuit. These settings are
maintained in micro seconds. The typical part geometry is to cut small or odd shaped angles.
Vertical, orbital, vectorial, directional, helical, conical, rotational, spin and indexing machining
cycles are also used.
Wire EDM
In wire electrical discharge machining (WEDM), or wire-cut EDM, a thin single-strand metal
wire, usually brass, is fed through the workpiece, typically occurring submerged in a tank of
dielectric fluid. This process is used to cut plates as thick as 300mm and to make punches,
tools,and dies from hard metals that are too difficult to machine with other methods. The
wire, which is constantly fed from a spool, is held between upper and lower diamond guides.
The guides move in the x–y plane, usually being CNC controlled and on almost all
modern machines the upper guide can also move independently in the z–u–v
axis, giving rise to the ability to cut tapered and transitioning shapes (circle on the bottom
square at the top for example) and can control axis movements in
x–y–u–v–i–j–k–l–. This gives the
wire-cut EDM the ability to be programmed to cut very intricate and delicate shapes. The wire
is controlled by upper and lower diamond guides that are usually accurate to 0.004 mm, and
can have a cutting path or kerf as small as 0.12 mm using Ø 0.1 mm wire, though the
average cutting kerf that achieves the best economic cost and machining time is 0.335 mm
using Ø 0.25 brass wire. The reason that the cutting width is greater than the width of
the wire is because sparking also occurs from the sides of the wire to the work piece,
causing erosion. This "overcut" is necessary, predictable, and easily
compensated for. Spools of wire are typically very long. For example, an 8 kg spool of 0.25
mm wire is just over 19 kilometers long. Today, the smallest wire diameter is 20 micrometres
and the geometry precision is not far from +/- 1 micrometre. The wire-cut process uses water
as its dielectric with the water\'s resistivity and other electrical properties carefully controlled
by filters and de-ionizer units. The water also serves the very critical purpose of flushing the
cut debris away from the cutting zone. Flushing is an important determining factor in the
maximum feed rate available in a given material thickness, and poor flushing situations
necessitate the reduction of the feed rate.
Along with tighter tolerances multiaxis EDM wire-cutting machining center have many added
features such as: Multiheads for cutting two parts at the same time, controls for preventing
wire breakage, automatic self-threading features in case of wire breakage, and
programmable machining strategies to optimize the operation.
Wire-cutting EDM is commonly used when low residual stresses are desired. Wire EDM may
leave residual stress on the workpiece that are less significant than those that may be left if
the same workpiece were obtained by machining. In fact in wire EDM there are not large
cutting forces involved in the removal of material. Yet, the workpiece may undergo to a
significant thermal cycle, whose severity depends on the technological parameters used.
Possible effects of such thermal cycles are the formation of a recast layer on the part and the
presence of tensile residual stresses on the workpiece. If the process is set up so that the
energy/power per pulse is relatively little (typically in finishing operations), little change in the
mechanical properties of a material is expected in wire-cutting EDM due to these low residual
stresses, although material that hasn\'t been stressed relieved can distort in the machining
process.
Applications
Prototype production
The EDM process is most widely used by the mould-making tool and die industries, but is
becoming a common method of making prototype and production parts, especially in the
aerospace, automobile and electronics industries in which production quantities are relatively
low. In Sinker EDM, a graphite, copper tungsten or pure copper electrode is machined into
the desired (negative) shape and fed into the workpiece on the end of a vertical ram.
Coinage die making
For the creation of dies for producing jewelry and badges by the coinage (stamping) process,
the positive master may be made from sterling silver, since (with appropriate machine
settings) the master is not significantly eroded and is used only once. The resultant negative
die is then hardened and used in a drop hammer to produce stamped flats from cutout sheet
blanks of bronze, silver, or low proof gold alloy. For badges these flats may be further
shaped to a curved surface by another die. This type of EDM is usually performed
submerged in an oil-based dielectric. The finished object may be further refined by hard
(glass) or soft (paint) enameling and/or electroplated with pure gold or nickel. Softer
materials such as silver may be hand engraved as a refinement.
EDM control panel (Hansvedt machine). Machine may be adjusted for a refined surface
(electropolish) at end of process.
Master at top, badge die workpiece at bottom, oil jets at left (oil has been drained). Initial flat
stamping will be "dapped" to give a curved surface.
Small hole drilling
Small hole drilling EDM is used to make a through hole in a workpiece in through which to
thread the wire in Wire-cut EDM machining. The small hole drilling head is mounted on wirecut machine and allows large hardened plates to have finished parts eroded from them as
needed and without pre-drilling. There are also stand-alone small hole drilling EDM machines
with an x–y axis also known as a super drill or hole popper that can machine blind or
through holes. EDM Drills bore holes with a long brass or copper tube electrode that rotates
in a chuck with a constant flow of distilled or deionized water flowing through the electrode as
a flushing agent and dielectric. The electrode tubes operate like the wire in wire-cut EDM
machines, having a spark gap and wear rate. Some small-hole drilling EDMs are able to drill
through 100 mm of soft or through hardened steel in less than 10 seconds, averaging 50% to
80% wear rate. Holes of 0.3 mm to 6.1 mm can be achieved in this drilling operation. Brass
electrodes are easier to machine but are not recommended for wire-cut operations due to
eroded brass particles causing "brass on brass" wire breakage, therefore copper
is recommended.
Advantages and disadvantages
Some of the advantages of EDM include machining of:
complex
shapes that would otherwise be difficult to produce with conventional cutting tools
extremely
hard material to very close tolerances
very
small work pieces where conventional cutting tools may damage the part from excess
cutting tool pressure.
Some of the disadvantages of EDM include:
The
slow rate of material removal.
The
additional time and cost used for creating electrodes for ram / Sinker EDM.
Reproducing
sharp corners on the workpiece is difficult due to electrode wear.
Dielectric
A dielectric is a nonconducting substance, i.e. an insulator. The term was coined by William
Whewell in response to a request from Michael Faraday.[1] Although "dielectric"
and "insulator" are generally considered synonymous, the term
"dielectric" is more often used to describe materials where the dielectric
polarization is important, such as the insulating material between the metallic plates of a
capacitor, while "insulator" is more often used when the material is being used to
prevent a current flow across it.
Dielectrics is the study of dielectric materials and involves physical models to describe how
an electric field behaves inside a material. It is characterized by how an electric field interacts
with an atom and is therefore possible to approach from either a classical interpretation or a
quantum one.
Many phenomena in electronics, solid state and optical physics can be described using the
underlying assumptions of the dielectric model. This can mean that the same mathematical
objects can go by many different names.
Contents
1
Definitions
1.1
Classical
1.2
Behavior
2
Dielectric
model
applied to
vacuum
3
Applications
3.1
Capacitors
3.2
Cable
insulation
4
Some
practical
dielectrics
5
also
6
See
References
7
External
links
Definitions
Electric field interaction with an atom under the classical dielectric model.
Von Hippel, in his seminal work, Dielectric Materials and Applications, stated:
Dielectrics... are not a narrow class of so-called insulators, but the broad expanse of
nonmetals considered from the standpoint of their interaction with electric, magnetic, or
electromagnetic fields. Thus we are concerned with gases as well as with liquids and solids,
and with the storage of electric and magnetic energy as well as its dissipation.[2]
Classical
In the classical approach to the dielectric model, a material is made up of atoms. Each atom
consists of a cloud of negative charge bound to and surrounding a positive point charge at its
centre. Because of the comparatively huge distance between them, none of the atoms in the
dielectric material interact with one another[citation needed]. Note: Remember that the model
is not attempting to say anything about the structure of matter. It is only trying to describe the
interaction between an electric field and matter.
In the presence of an electric field the charge cloud is distorted, as shown in the top right of
the figure.
This can be reduced to a simple dipole using the superposition principle. A dipole is
characterized by its dipole moment, a vector quantity shown in the figure as the blue arrow
labeled M. It is the relationship between the electric field and the dipole moment that gives
rise to the behavior of the dielectric. Note: The dipole moment is shown to be pointing in the
same direction as the electric field. This isn\'t always correct, and it is a major simplification,
but it is suitable for many materials.[citation needed]
When the electric field is removed the atom returns to its original state. The time required to
do so is the so-called relaxation time; an exponential decay.
Behavior
This is the essence of the model in physics. The behavior of the dielectric now depends on
the situation. The more complicated the situation the richer the model has to be in order to
accurately describe the behavior. Important questions are:
Is
If
the electric field constant or does it vary with time?
the electric field does vary, at what rate?
What
are the characteristics of the material?
Is
the direction of the field important (isotropy)?
Is
the material the same all the way through (homogeneous)?
Are
Is
there any boundaries/interfaces that have to be taken into account?
the system linear or do nonlinearities have to be taken into account?
The relationship between the electric field E and the dipole moment M gives rise to the
behavior of the dielectric, which, for a given material, can be characterized by the function F
defined by the equation:
.
When both the type of electric field and the type of material have been defined, one then
chooses the simplest function F that correctly predicts the phenomena of interest. Examples
of possible phenomena:
Refractive
Group
index
velocity dispersion
Birefringence
Self-focusing
Harmonic
generation
May be modeled by choosing a suitable function F.
Dielectric model applied to vacuum
From the definition it might seem strange to apply the dielectric model to a vacuum, however,
it is both the simplest and the most accurate example of a dielectric.
Recall that the property which defines how a dielectric behaves is the relationship between
the applied electric field and the induced dipole moment. For a vacuum the relationship is a
real constant number. This constant is called the permittivity of free space, ε0.
Applications
Capacitors
Commercially manufactured capacitors typically use a solid dielectric material with high
permittivity as the intervening medium between the stored positive and negative charges.
This material is often referred to in technical contexts as the "capacitor dielectric"
[3] . The most obvious advantage to using such a dielectric material is that it prevents the
conducting plates on which the charges are stored from coming into direct electrical contact.
More significantly however, a high permittivity allows a greater charge to be stored at a given
voltage. This can be seen by treating the case of a linear dielectric with permittivity ε
and thickness d between two conducting plates with uniform charge density
σε. In this case, the charge density is given by
and the capacitance per unit area by
From this, it can easily be seen that a larger ε leads to greater charge stored and
thus greater capacitance.
Dielectric materials used for capacitors are also chosen such that they are resistant to
ionization. This allows the capacitor to operate at higher voltages before the insulating
dielectric ionizes and begins to allow undesirable current flow.
Cable insulation
The term "dielectric" may also refer to the insulation used in power and RF
cables[citation needed]. Common materials used as electrical insulations are electrical
insulation paper and plastics.
Some practical dielectrics
Dielectric materials can be solids, liquids, or gases. In addition, a high vacuum can also be a
useful, lossless dielectric even though its relative dielectric constant is only unity.
Solid dielectrics are perhaps the most commonly used dielectrics in electrical engineering,
and many solids are very good insulators. Some examples include porcelain, glass, and
most plastics. Air, nitrogen and sulfur hexafluoride are the three most commonly used
gaseous dielectrics.
Industrial
coatings such as parylene provide a dielectric barrier between the substrate and
its environment.
Mineral
oil is used extensively inside electrical transformers as a fluid dielectric and to
assist in cooling. Dielectric fluids with higher dielectric constants, such as electrical grade
castor oil, are often used in high voltage capacitors to help prevent corona discharge and
increase capacitance.
Because
dielectrics resist the flow of electricity, the surface of a dielectric may retain
stranded excess electrical charges. This may occur accidentally when the dielectric is rubbed
(the triboelectric effect). This can be useful, as in a Van de Graaff generator or electrophorus,
or it can be potentially destructive as in the case of electrostatic discharge.
Specially
processed dielectrics, called electrets (also known as ferroelectrics), may retain
excess internal charge or "frozen in" polarization. Electrets have a
semipermanent external electric field, and are the electrostatic equivalent to magnets.
Electrets have numerous practical applications in the home and industry.
Some
dielectrics can generate a potential difference when subjected to mechanical stress,
or change physical shape if an external voltage is applied across the material. This property
is called piezoelectricity. Piezoelectric materials are another class of very useful dielectrics.
Some
ionic crystals and polymer dielectrics exhibit a spontaneous dipole moment which
can be reversed by an externally applied electric field. This behavior is called the ferroelectric
effect. These materials are analogous to the way ferromagnetic materials behave within an
externally applied magnetic field. Ferroelectric materials often have very high dielectric
constants, making them quite useful for capacitors.
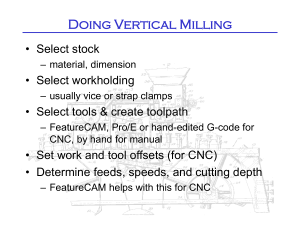
Milling machine
Example of a CNC vertical milling center
A CAD designed part (top) and physical part (bottom) produced by CNC milling.
This article
includes a
list of
references,
related
reading or
external
links, but its
sources
remain
unclear
because it
lacks inline
citations.
Please
improve
this article
by
introducing
more
precise
citations
where
appropriate.
(October
2008)
A milling machine is a machine tool used for the shaping of metal and other solid materials.
Milling machines exist in two basic forms: horizontal and vertical, which terms refer to the
orientation of the cutting tool spindle. Unlike a drill press, in which the workpiece is held
stationary and the drill is moved vertically to penetrate the material, milling also involves
movement of the workpiece against the rotating cutter, the latter which is able to cut on its
flanks as well as its tip. Workpiece and cutter movement are precisely controlled to less than
0.001 inches (.025 millimeters), usually by means of precision ground slides and leadscrews
or analogous technology. Milling machines may be manually operated, mechanically
automated, or digitally automated via computer numerical control (CNC).
Milling machines can perform a vast number of operations, some very complex, such as slot
and keyway cutting, planing, drilling, diesinking, rebating, routing, etc. Cutting fluid is often
pumped to the cutting site to cool and lubricate the cut, and to sluice away the resulting
swarf.
Contents
[hide]
1
Types
1.1
Comparing
vertical
with
horizontal
1.2
Other
milling
machine
variants
and
terminology
2
Computer
numerical
control
2.1
Milling
machine
tooling
3
History
3.1
1810s1830s
3.2
1840s1860
3.3
1860s
3.4
1870s-
1930s
3.5
1940s1970s
3.6
1980spresent
4
See
also
5
References
6
Further
reading
7
External
links
Types
There are many ways to classify milling machines, depending on which criteria are the focus:
Criterion
Example
Comments
classification scheme
Control
Manual; Mechanically In the CNC era, a
automated via cams; very basic
Digitally automated distinction is
via NC/CNC
manual versus
CNC. Among
manual
machines, a
worthwhile
distinction is nonDRO-equipped
versus DROequipped
Control
Number of axes (e.g.,
(specifically 3-axis, 4-axis, or
among
more); Within this
CNC
scheme, also:
machines)
Pallet-changing
versus non-palletchanging
Full-auto
toolchanging versus
semi-auto or manual
tool-changing
Spindle
Vertical versus
axis
horizontal; Turret
orientation versus non-turret
Among vertical
mills,
"Bridgeportstyle" is a
whole class of
mills inspired by
the Bridgeport
original
Purpose
General-purpose
versus specialpurpose or singlepurpose
Purpose
Toolroom machine
versus production
machine
Purpose
"Plain"
A distinction
versus
whose meaning
"universal" evolved over
decades as
technology
progressed, and
overlaps with
Overlaps with
above
other purpose
classifications
above; more
historical interest
than current
Size
Micro, mini, benchtop,
standing on floor,
large, very large,
gigantic
Power
source
Line-shaft-drive
versus individual
electric motor drive
Handcrankpower
versus
electric
Hand-cranked not
used in industry but
suitable for hobbyist
micromills
Most line-shaftdrive machines,
ubiquitous circa
1880-1930, have
been scrapped
by now
Comparing vertical with horizontal
In the vertical mill the spindle axis is vertically oriented. Milling cutters are held in the spindle
and rotate on its axis. The spindle can generally be extended (or the table can be
raised/lowered, giving the same effect), allowing plunge cuts and drilling. There are two
subcategories of vertical mills: the bedmill and the turret mill. Turret mills, like the ubiquitous
Bridgeport, are generally smaller than bedmills, and are considered by some to be more
versatile. In a turret mill the spindle remains stationary during cutting operations and the table
is moved both perpendicular to and parallel to the spindle axis to accomplish cutting. In the
bedmill, however, the table moves only perpendicular to the spindle\'s axis, while the spindle
itself moves parallel to its own axis. Also of note is a lighter machine, called a mill-drill. It is
quite popular with hobbyists, due to its small size and lower price. These are frequently of
lower quality than other types of machines, however.
A horizontal mill has the same sort of x–y table, but the cutters are mounted on a
horizontal arbor (see Arbor milling) across the table. A majority of horizontal mills also feature
a +15/-15 degree rotary table that allows milling at shallow angles. While endmills and the
other types of tools available to a vertical mill may be used in a horizontal mill, their real
advantage lies in arbor-mounted cutters, called side and face mills, which have a cross
section rather like a circular saw, but are generally wider and smaller in diameter. Because
the cutters have good support from the arbor, quite heavy cuts can be taken, enabling rapid
material removal rates. These are used to mill grooves and slots. Plain mills are used to
shape flat surfaces. Several cutters may be ganged together on the arbor to mill a complex
shape of slots and planes. Special cutters can also cut grooves, bevels, radii, or indeed any
section desired. These specialty cutters tend to be expensive. Simplex mills have one
spindle, and duplex mills have two. It is also easier to cut gears on a horizontal mill.
A miniature hobbyist mill plainly showing the basic parts of a mill.
Other milling machine variants and terminology
Box
or column mills are very basic hobbyist bench-mounted milling machines that feature
a head riding up and down on a column or box way.
Turret
or vertical ram mills are more commonly referred to as Bridgeport-type milling
machines. The spindle can be aligned in many different positions for a very versatile, if
somewhat less rigid machine.
Knee
mill or knee-and-column mill refers to any milling machine whose x-y table rides up
and down the column on a vertically adjustable knee. This includes Bridgeports.
C-Frame
mills are larger, industrial production mills. They feature a knee and fixed spindle
head that is only mobile vertically. They are typically much more powerful than a turret mill,
featuring a separate hydraulic motor for integral hydraulic power feeds in all directions, and a
twenty to fifty horsepower motor. Backlash eliminators are almost always standard
equipment. They use large NMTB 40 or 50 tooling. The tables on C-frame mills are usually
18" by 68" or larger, to allow multiple parts to be machined at the same time.
Planer-style
mills are large mills built in the same configuration as planers except with a
milling spindle instead of a planing head. This term is growing dated as planers themselves
are largely a thing of the past.
Bed
mill refers to any milling machine where the spindle is on a pendant that moves up
and down to move the cutter into the work. These are generally more rigid than a knee mill.
Ram
type mill refers to a mill that has a swiveling cutting head mounted on a sliding ram.
The spindle can be oriented either vertically or horizontally, or anywhere in between. Van
Norman specialized in ram type mills through most of the 20th century, but since the advent
of CNC machines ram type mills are no longer made.
Jig
borers are vertical mills that are built to bore holes, and very light slot or face milling.
They are typically bed mills with a long spindle throw. The beds are more accurate, and the
handwheels are graduated down to .0001" for precise hole placement.
Horizontal
boring mills are large, accurate bed horizontal mills that incorporate many
features from various machine tools. They are predominantly used to create large
manufacturing jigs, or to modify large, high precision parts. They have a spindle stroke of
several (usually between four and six) feet, and many are equipped with a tailstock to
perform very long boring operations without losing accuracy as the bore increases in depth.
A typical bed would have X and Y travel, and be between three and four feet square with a
rotary table or a larger rectangle without said table. The pendant usually has between four
and eight feet in vertical movement. Some mills have a large (30" or more) integral
facing head. Right angle rotary tables and vertical milling attachments are available to further
increase productivity.
Floor
mills have a row of rotary tables, and a horizontal pendant spindle mounted on a set
of tracks that runs parallel to the table row. These mills have predominantly been converted
to CNC, but some can still be found (if one can even find a used machine available) under
manual control. The spindle carriage moves to each individual table, performs the machining
operations, and moves to the next table while the previous table is being set up for the next
operation. Unlike any other kind of mill, floor mills have floor units that are entirely movable.
A crane will drop massive rotary tables, X-Y tables, and the like into position for machining,
allowing the largest and most complex custom milling operations to take place.
Computer numerical control
Thin wall milling of aluminum using a water based coolant on the milling cutter
Most CNC milling machines (also called machining centers) are computer controlled vertical
mills with the ability to move the spindle vertically along the Z-axis. This extra degree of
freedom permits their use in diesinking, engraving applications, and 2.5D surfaces such as
relief sculptures. When combined with the use of conical tools or a ball nose cutter, it also
significantly improves milling precision without impacting speed, providing a cost-efficient
alternative to most flat-surface hand-engraving work.
Five-axis machining center with rotating table and computer interface
CNC machines can exist in virtually any of the forms of manual machinery, like horizontal
mills. The most advanced CNC milling-machines, the 5-axis machines, add two more axes in
addition to the three normal axes (XYZ). Horizontal milling machines also have a C or Q axis,
allowing the horizontally mounted workpiece to be rotated, essentially allowing asymmetric
and eccentric turning. The fifth axis (B axis) controls the tilt of the tool itself. When all of these
axes are used in conjunction with each other, extremely complicated geometries, even
organic geometries such as a human head can be made with relative ease with these
machines. But the skill to program such geometries is beyond that of most operators.
Therefore, 5-axis milling machines are practically always programmed with CAM.
With the declining price of computers, free operating systems such as Linux, and open
source CNC software, the entry price of CNC machines has plummeted. For example,
Sherline, Prazi, and others make desktop CNC milling machines that are affordable by
hobbyists.
High speed steel with cobalt endmills used for cutting operations in a milling machine.
Milling machine tooling
There is some degree of standardization of the tooling used with CNC Milling Machines and
to a much lesser degree with manual milling machines.
CNC Milling machines will nearly always use SK (or ISO), CAT, BT or HSK tooling. SK
tooling is the most common in Europe, while CAT tooling, sometimes called V-Flange
Tooling, is the oldest variation and is probably still the most common in the USA. CAT tooling
was invented by Caterpillar Inc. of Peoria, Illinois in order to standardize the tooling used on
their machinery. CAT tooling comes in a range of sizes designated as CAT-30, CAT-40,
CAT-50, etc. The number refers to the Association for Manufacturing Technology (formerly
the National Machine Tool Builders Association (NMTB)) Taper size of the tool.
CAT-40 Toolholder
An improvement on CAT Tooling is BT Tooling, which looks very similar and can easily be
confused with CAT tooling. Like CAT Tooling, BT Tooling comes in a range of sizes and uses
the same NMTB body taper. However, BT tooling is symmetrical about the spindle axis,
which CAT tooling is not. This gives BT tooling greater stability and balance at high speeds.
One other subtle difference between these two toolholders is the thread used to hold the pull
stud. CAT Tooling is all Imperial thread and BT Tooling is all Metric thread. Note that this
affects the pull stud only, it does not affect the tool that they can hold, both types of tooling
are sold to accept both Imperial and metric sized tools.
SK and HSK tooling, sometimes called "Hollow Shank Tooling", is much more
common in Europe where it was invented than it is in the United States. It is claimed that
HSK tooling is even better than BT Tooling at high speeds. The holding mechanism for HSK
tooling is placed within the (hollow) body of the tool and, as spindle speed increases, it
expands, gripping the tool more tightly with increasing spindle speed. There is no pull stud
with this type of tooling.
The situation is quite different for manual milling machines — there is little
standardization. Newer and larger manual machines usually use NMTB tooling. This tooling
is somewhat similar to CAT tooling but requires a drawbar within the milling machine.
Furthermore, there are a number of variations with NMTB tooling that make
interchangeability troublesome.
Boring head on Morse Taper Shank
Two other tool holding systems for manual machines are worthy of note: They are the R8
collet and the Morse Taper #2 collet. Bridgeport Machines of Bridgeport, Connecticut so
dominated the milling machine market for such a long time that their machine "The
Bridgeport" is virtually synonymous with "Manual milling machine." The bulk
of the machines that Bridgeport made from about 1965 onward used an R8 collet system.
Prior to that, the bulk of the machines used a Morse Taper #2 collet system.
As an historical footnote: Bridgeport is now owned by Hardinge Brothers of Elmira, New
York.
History
1810s-1830s
Milling machines evolved from the practice of rotary filing—that is, running a circular
cutter with file-like teeth in the headstock of a lathe. Both rotary filing and later true milling
were developed in order to reduce the time and effort spent on hand-filing. The full, true story
of the milling machine\'s development will probably never be known, because much of the
early development took place in individual shops where generally no one was taking down
records for posterity. However, the broad outlines are known. Rotary filing long predated
milling. A rotary file by Jacques de Vaucanson, circa 1760, is well known. It is clear that
milling machines as a distinct class of machine tool (separate from lathes running rotary files)
first appeared between 1814 and 1818. Joseph W. Roe, a respected founding father of
machine tool historians, credited Eli Whitney with producing the first true milling machine.
However, subsequent scholars, including Robert S. Woodbury and others, suggest that just
as much credit belongs to various other inventors, including Robert Johnson, Simeon North,
Captain John H. Hall, and Thomas Blanchard. (Several of the men mentioned above are
sometimes described on the internet as "the inventor of the first milling machine"
or "the inventor of interchangeable parts". Such claims are oversimplified, as
these technologies evolved over time among many people.) The two federal armories of the
U.S. (Springfield and Harpers Ferry) and the various private armories and inside contractors
that shared turnover of skilled workmen with them were the centers of earliest development
of true milling machines (as distinct from lathe headstocks tooled up for rotary filing).
James Nasmyth built a milling machine very advanced for its time between 1829 and 1831. It
was tooled to mill the six sides of a hex nut that was mounted in a six-way indexing fixture.
A milling machine built and used in the shop of Gay & Silver (aka Gay, Silver, &
Co) in the 1830s was influential because it employed a better method of vertical positioning
than earlier machines. For example, Whitney\'s machine (the one that Roe considered the
very first) and others did not make provision for vertical travel of the knee. Evidently the
workflow assumption behind this was that the machine would be set up with shims, vise, etc.
for a certain part design and successive parts would not require vertical adjustment (or at
most would need only shimming). This indicates that the earliest way of thinking about milling
machines was as production machines, not toolroom machines.
1840s-1860
Some of the key men in milling machine development during this era included Frederick W.
Howe, Francis A. Pratt, Elisha K. Root, and others. (These same men during the same era
were also busy developing the state of the art in turret lathes. Howe\'s experience at Gay
& Silver in the 1840s acquainted him with early versions of both machine tools. His
machine tool designs were later built at Robbins & Lawrence, the Providence Tool
Company, and Brown & Sharpe.) The most successful milling machine design to
emerge during this era was the Lincoln miller, which rather than being a specific make and
model of machine tool is truly a family of related tools built by various companies over
several decades. It took its name from the first company to put one on the market, George S.
Lincoln & Company.
During this era there was a continued blind spot in milling machine design, as various
designers failed to develop a truly simple and effective means of providing slide travel in all
three of the archetypal milling axes (X, Y, and Z—or as they were known in the past,
longitudinal, traverse, and vertical). Vertical positioning ideas were either absent or
underdeveloped.
1860s
Brown & Sharpe\'s groundbreaking universal milling machine, 1861.
In 1861, Frederick W. Howe, while working for the Providence Tool Company, asked Joseph
R. Brown of Brown & Sharpe for a solution to the problem of milling spirals, such as the
flutes of twist drills. These were filed by hand at the time. Brown designed a "universal
milling machine" that, starting from its first sale in March 1862, was wildly successful. It
solved the problem of 3-axis (XYZ) travel much more elegantly than had been done in the
past, and it allowed for the milling of spirals using an indexing head fed in coordination with
the table feed. The term "universal" was applied to it because it was ready for any
kind of work and was not as limited in application as previous designs. (Howe had designed
a "universal miller" in 1852, but Brown\'s of 1861 is the one considered
groundbreakingly successful.)
Brown also developed and patented (1864) the design of formed milling cutters in which
successive sharpenings of the teeth do not disturb the geometry of the form.
The advances of the 1860s opened the floodgates and ushered in modern milling practice.
1870s-1930s
Two firms which most dominated the milling machine field during these decades were Brown
& Sharpe and the Cincinnati Milling Machine Company. However, hundreds of other
firms built milling machines during this time, and many were significant in one way or
another. The archetypal workhorse milling machine of the late 19th and early 20th centuries
was a heavy knee-and-column horizontal-spindle design with power table feeds, indexing
head, and a stout overarm to support the arbor.
A. L. De Leeuw of the Cincinnati Milling Machine Company is credited with applying scientific
study to the design of milling cutters, leading to modern practice with larger, more widely
spaced teeth.
Around the end of World War I, machine tool control advanced in various ways that laid the
groundwork for later CNC technology. The jig borer popularized the ideas of coordinate
dimensioning (dimensioning of all locations on the part from a single reference point);
working routinely in "tenths" (ten-thousandths of an inch, 0.0001") as an
everyday machine capability; and using the control to go straight from drawing to part,
circumventing jig-making. In 1920 the new tracer design of J.C. Shaw was applied to Keller
tracer milling machines for die-sinking via the three-dimensional copying of a template. This
made diesinking faster and easier just as dies were in higher demand than ever before, and
was very helpful for large steel dies such as those used to stamp sheets in automobile
manufacturing. Such machines translated the tracer movements to input for servos that
worked the machine leadscrews or hydraulics. They also spurred the development of
antibacklash leadscrew nuts. All of the above concepts were new in the 1920s but would
become routine in the NC/CNC era. By the 1930s, incredibly large and advanced milling
machines existed, such as the Cincinnati Hydro-Tel, that presaged today\'s CNC mills in
every respect except the CNC control itself.
1940s-1970s
By 1940, automation via cams, such as in screw machines and automatic chuckers, had
already been very well developed for decades. By the close of World War II, many additional
ideas involving servomechanisms were in the air. These ideas, which soon were combined
with the emerging technology of digital computers, transformed machine tool control very
deeply. The details (which are beyond the scope of this article) have evolved immensely with
every passing decade since World War II.
During the 1950s, numerical control (NC) made its appearance.
During the 1960s and 1970s, NC evolved into CNC, data storage and input media evolved,
computer processing power and memory capacity steadily increased, and NC and CNC
machine tools gradually disseminated from the level of huge corporations to the level of
medium-sized corporations.
1980s-present
Computers and CNC machine tools continue to develop rapidly. The PC revolution has a
great impact on this development. By the late 1980s small machine shops had desktop
computers and CNC machine tools. After that hobbyists began obtaining CNC mills and
lathes
G-code
This article is about the machine tool programming language. For the video recorder
programming system, see Video recorder scheduling code.
G-Code, or preparatory code or function, are functions in the Numerical control
programming language. The G-codes are the codes that position the tool and do the actual
work, as opposed to M-codes, that manages the machine; T for tool-related codes. S and F
are tool-Speed and tool-Feed, and finally D-codes for tool compensation.
The programming language of Numerical Control (NC) is sometimes informally called Gcode. But in actuality, G-codes are only a part of the NC-programming language that controls
NC and CNC machine tools. The term Numerical Control was coined at the MIT
Servomechanisms Laboratory, and several versions of NC were and are still developed
independently by CNC-machine manufacturers. The main standardized version used in the
United States was settled by the Electronic Industries Alliance in the early 1960s. A final
revision was approved in February 1980 as RS274D. In Europe, the standard DIN 66025 /
ISO 6983 is often used instead.
Due to the lack of further development, the immense variety of machine tool configurations,
and little demand for interoperability, few machine tool controllers (CNCs) adhere to this
standard. Extensions and variations have been added independently by manufacturers, and
operators of a specific controller must be aware of differences of each manufacturers\'
product. When initially introduced, CAM systems were limited in the configurations of tools
supported.
Today, the main manufacturers of CNC control systems are GE Fanuc Automation (joint
venture of General Electric and Fanuc), Siemens, Mitsubishi, and Heidenhain, but there still
exist many smaller and/or older controller systems.
Some CNC machine manufacturers attempted to overcome compatibility difficulties by
standardizing on a machine tool controller built by Fanuc. Unfortunately, Fanuc does not
remain consistent with RS-274 or its own previous versions, and has been slow at adding
new features, as well as exploiting increases in computing power. For example, they
changed G70/G71 to G20/G21; they used parentheses for comments which caused difficulty
when they introduced mathematical calculations so they use square parentheses for macro
calculations; they now have nano technology recently in 32-bit mode but in the Fanuc 15MB
control they introduced HPCC (high-precision contour control) which uses a 64-bit RISC
processor and this now has a 500 block buffer for look-ahead for correct shape contouring
and surfacing of small block programs and 5-axis continuous machining.
This is also used for NURBS to be able to work closely with industrial designers and the
systems that are used to design flowing surfaces. The NURBS has its origins from the ship
building industry and is described by using a knot and a weight as for bending steamed
wooden planks and beams.
Contents
1
Common
Codes
2
Example
Program
3
See
also
4
External
links
Common Codes
G-codes are also called preparatory codes, and are any word in a CNC program that begins
with the letter \'G\'. Generally it is a code telling the machine tool what type of action to
perform, such as:
rapid
move
controlled
feed move in a straight line or arc
series
of controlled feed moves that would result in a hole being bored, a workpiece cut
(routed) to a specific dimension, or a decorative profile shape added to the edge of a
workpiece.
change
set
a pallet
tool information such as offset.
There are other codes; the type codes can be thought of like registers in a computer
X absolute position
Y absolute position
Z absolute position
A position (rotary around X)
B position (rotary around Y)
C position (rotary around Z)
U Relative axis parallel to X
V Relative axis parallel to Y
W Relative axis parallel to Z
M code (another "action" register or Machine code(*)) (otherwise referred to as a
"Miscellaneous" function")
F feed rate
S spindle speed
N line number
R Arc radius or optional word passed to a subprogram/canned cycle
P Dwell time or optional word passed to a subprogram/canned cycle
T Tool selection
I Arc data X axis
J Arc data Y axis.
K Arc data Z axis, or optional word passed to a subprogram/canned cycle
D Cutter diameter/radius offset
H Tool length offset
(*) M codes control the overall machine, causing it to stop, start, turn on coolant, etc.,
whereas other codes pertain to the path traversed by cutting tools. Different machine tools
may use the same code to perform different functions; even machines that use the same
CNC control.
Partial
list of M-Codes
M00=Program Stop (non-optional)
M01=Optional Stop, machine will only stop if operator selects this option
M02=End of Program
M03=Spindle on (CW rotation)
M04=Spindle on (CCW rotation)
M05=Spindle Stop
M06=Tool Change
M07=Coolant on (flood)
M08=Coolant on (mist)
M09=Coolant off
M10=Pallet clamp on
M11=Pallet clamp off
M30=End of program/rewind tape (may still be required for older CNC machines)
Common
FANUC
G Codes
for Mill
Code
Description
G00
Rapid
positioning
G01
Linear
interpolation
G02
CW circular
interpolation
G03
CCW circular
interpolation
G04
Dwell
G05.1
Q1.
Ai Nano
contour
control
G05
HPCC
P10000
G07
Imaginary axis
designation
G09
Exact stop
check
G10/G11 Programmable
Data
input/Data
write cancel
G12
CW Circle
Cutting
G13
CCW Circle
Cutting
G17
X-Y plane
selection
G18
X-Z plane
selection
G19
Y-Z plane
selection
G20
Programming
in inches
G21
Programming
in mm
G28
Return to
home position
G30
2nd reference
point return
G31
Skip function
(used for
probes and
tool length
measurement
systems)
G33
Constant pitch
threading
G34
Variable pitch
threading
G40
Tool radius
compensation
off
G41
Tool radius
compensation
left
G42
Tool radius
compensation
right
G43
Tool offset
compensation
negative
G44
Tool offset
compensation
positive
G45
Axis offset
single
increase
G46
Axis offset
single
decrease
G47
Axis offset
double
increase
G48
Axis offset
double
decrease
G49
Tool offset
compensation
cancel
G50
Define the
maximum
spindle speed
G53
Machine
coordinate
system
G54 to
G59
Work
coordinate
systems
G54.1
P1 to
P48
Extended
work
coordinate
systems
G73
High speed
drilling canned
cycle
G74
Left hand
tapping
canned cycle
G76
Fine boring
canned cycle
G80
Cancel
canned cycle
G81
Simple drilling
cycle
G82
Drilling cycle
with dwell
G83
Peck drilling
cycle
G84
Tapping cycle
G84.2
Direct right
hand tapping
canned cycle
G90
Absolute
programming
(type B and C
systems)
G91
Incremental
programming
(type B and C
systems)
G92
Programming
of absolute
zero point
G94/G95 Inch per
minute/Inch
per revolution
feed (type A
system) Note:
Some CNCs
use the SI unit
system
G96
Constant
surface speed
G97
Constant
Spindle speed
G98/G99 Return to
Initial Z
plane/R plane
in canned
cycle
A standardized version of G-code known as BCL is used, but only on very few machines.
G-code files may be generated by CAM software. Those applications typically use translators
called post-processors to output code optimized for a particular machine type or family. Postprocessors are often user-editable to enable further customization, if necessary. G-code is
also output by specialized CAD systems used to design printed circuit boards. Such software
must be customized for each type of machine tool that it will be used to program. Some Gcode is written by hand for volume production jobs. In this environment, the inherent
inefficiency of CAM-generated G-code is unacceptable.
Some CNC machines use "conversational" programming, which is a wizard-like
programming mode that either hides G-code or completely bypasses the use of G-code.
Some popular examples are Southwestern Industries\' ProtoTRAK, Mazak\'s Mazatrol,
Hurco\'s Ultimax and Mori Seiki\'s CAPS conversational software.
Example Program
This is a generic program that demonstrates the use of G-Code to turn a 1" diameter X
1" long part. Assume that a bar of material is in the machine and that the bar is slightly
oversized in length and diameter and that the bar protrudes by more than 1" from the
face of the chuck. (Caution: This is generic, it might not work on any real machine! Pay
particular attention to point 5 below.)
Tool Path for program
Sample
Line
Code
Description
N01
M216
Turn on
load
monitor
N02
G00
X20
Z20
Rapid
move away
from the
part, to
ensure the
starting
position of
the tool
N03
G50
Set
S2000 Maximum
spindle
speed
N04
M01
N05
T0303 Select tool
M6
#3 from the
carousel,
Optional
stop
use tool
offset
values
located in
line 3 of
the
program
table,
index the
turret to
select new
tool
N06
G96
S854
M42
M03
M08
Variable
speed
cutting,
854 ft/min,
High
spindle
gear, Start
spindle
CW
rotation,
Turn the
mist
coolant on
N07
G00
X1.1
Z1.1
Rapid feed
to a point
0.1"
from the
end of the
bar and
0.05"
from the
side
N08
G01
Z1.0
F.05
Feed in
horizontally
until the
tool is
standing
1"
from the
datum
N09
X0.0
Feed down
until the
tool is on
center Face the
end of the
bar
N10
G00
Z1.1
Rapid feed
0.1"
away from
the end of
the bar
N11
X1.0
Rapid feed
up until the
tool is
standing at
the
finished
OD
N12
G01
Z0.0
F.05
Feed in
horizontally
cutting the
bar to
1"
diameter
all the way
to the
datum
N13
M05
M09
Stop the
spindle,
Turn off
the coolant
N14
G28
Home X
G91 X0 axis in the
machine
coordinate
system,
then home
all other
axes
N15
M215
Turn the
load
monitor off
N16
M30
Program
stop, pallet
change if
applicable,
rewind to
beginning
of the
program
Several points to note:
There is room for some programming style, even in this short program. The grouping of
codes in line N06 could have been put on multiple lines. Doing so may have made it easier to
follow program execution.
Many codes are "Modal" meaning that they stay in effect until they are cancelled
or replaced by a contradictory code. For example, once variable speed cutting had been
selected (G96), it stayed in effect until the end of the program. In operation, the spindle
speed would increase as the tool neared the center of the work in order to maintain a
constant cutting speed. Similarly, once rapid feed was selected (G00) all tool movements
would be rapid until a feed rate code (G01, G02, G03) was selected.
It is common practice to use a load monitor with CNC machinery. The load monitor will stop
the machine if the spindle or feed loads exceed a preset value that is set during the set-up
operation. The job of the load monitor is to prevent machine damage in the event of tool
breakage or a programming mistake. On small or hobby machines, it can warn of a tool that
is becoming dull and needs to be replaced or sharpened.
It is common practice to bring the tool in rapidly to a "safe" point that is close to
the part - in this case 0.1" away - and then start feeding the tool. How close that
"safe" distance is, depends on the skill of the programmer and maximum material
condition for the raw stock.
If the program is wrong, there is a high probability that the machine will crash, or ram the tool
into the part under high power. This can be costly, especially in newer machining centers. It
is possible to intersperse the program with optional stops (M01 code) which allow the
program to be run piecemeal for testing purposes. The optional stops remain in the program
but they are skipped during the normal running of the machine. Thankfully, most CAD/CAM
software ships with CNC simulators that will display the movement of the tool as the program
executes. Many modern CNC machines also allow programmers to execute the program in a
simulation mode and observe the operating parameters of the machine at a particular
execution point. This enables programmers to discover semantic errors (as opposed to
syntax errors) before losing material or tools to an incorrect program. Depending on the size
of the part, wax blocks may be used for testing purposes as well.
For pedagogical purposes, line numbers have been included in the program above. They are
usually not necessary for operation of a machine, so they are seldom used in industry.
However, if branching or looping statements are used in the code, then line numbers may
well be included as the target of those statements (e.g. GOTO N99).
MATLAB
For the subdistrict in Chandpur District, Bangladesh, see Matlab Upazila. For the computer
algebra system, see MATHLAB.
MATLAB
MATLAB
R2008a
screenshot
Developer(s) The
MathWorks
Stable
release
R2009a /
2009-0306; 4
months
ago
Written in
C
Operating
system
Crossplatform[1]
Type
Technical
computing
License
Proprietary
Website
MATLAB
product
page
MATLAB
Paradigm imperative
Appeared late 1970s
in
Designed Cleve
by
Moler
Developer The
MathWorks
Typing
dynamic
discipline
OS
Crossplatform
MATLAB is a numerical computing environment and fourth generation programming
language. Developed by The MathWorks, MATLAB allows matrix manipulation, plotting of
functions and data, implementation of algorithms, creation of user interfaces, and interfacing
with programs in other languages. Although it is numeric only, an optional toolbox uses the
MuPAD symbolic engine, allowing access to computer algebra capabilities. An additional
package, Simulink, adds graphical multidomain simulation and Model-Based Design for
dynamic and embedded systems.
In 2004, MathWorks claimed that MATLAB was used by more than one million people across
industry and the academic world.[2]
Contents
1
History
2
Syntax
2.1
Variables
2.2
Vectors/Matrices
2.3
Semicolon
2.4
Graphics
3
ObjectOriented
Programming
4
Limitations
5
Interactions
with other
languages
6
Alternatives
7
Release
history
8
See also
9
References
10
Further
reading
11
External
links
History
MATLAB (meaning "matrix laboratory") was invented in the late 1970s by Cleve
Moler, then chairman of the computer science department at the University of New
Mexico.[3] He designed it to give his students access to LINPACK and EISPACK without
having to learn Fortran. It soon spread to other universities and found a strong audience
within the applied mathematics community. Jack Little, an engineer, was exposed to it during
a visit Moler made to Stanford University in 1983. Recognizing its commercial potential, he
joined with Moler and Steve Bangert. They rewrote MATLAB in C and founded The
MathWorks in 1984 to continue its development. These rewritten libraries were known as
JACKPAC.[citation needed] In 2000, MATLAB was rewritten to use a newer set of libraries
for matrix manipulation, LAPACK[4].
MATLAB was first adopted by control design engineers, Little\'s specialty, but quickly spread
to many other domains. It is now also used in education, in particular the teaching of linear
algebra and numerical analysis, and is popular amongst scientists involved with image
processing.[3]
Syntax
This article
is written
like a
manual or
guidebook.
Please
help
rewrite this
article
from a
neutral
point of
view.
(October
2008)
MATLAB, the application, is built around the MATLAB language. The simplest way to
execute MATLAB code is to type it in at the prompt, >> , in the Command Window, one
of the elements of the MATLAB Desktop. In this way, MATLAB can be used as an interactive
mathematical shell. Sequences of commands can be saved in a text file, typically using the
MATLAB Editor, as a script or encapsulated into a function, extending the commands
available.[5]
Variables
Variables are defined with the assignment operator, =. MATLAB is dynamically typed,
meaning that variables can be assigned without declaring their type, except if they are to be
treated as symbolic objects[6], and that their type can change. Values can come from
constants, from computation involving values of other variables, or from the output of a
function. For example:
>> x = 17
x=
17
>> x = \'hat\'
x=
hat
>> x = [3*4, pi/2]
x=
12.0000 1.5708
>> y = 3*sin(x)
y=
-1.6097 3.0000
Vectors/Matrices
MATLAB is a "Matrix Laboratory", and as such it provides many convenient ways
for creating vectors, matrices, and multi-dimensional arrays. In the MATLAB vernacular, a
vector refers to a one dimensional (1×N or N×1) matrix, commonly referred to as
an array in other programming languages. A matrix generally refers to a 2-dimensional array,
i.e. an m×n array where m and n are greater than or equal to 1. Arrays with more than
two dimensions are referred to as multidimensional arrays.
MATLAB provides a simple way to define simple arrays using the syntax:
init:increment:terminator. For instance:
>> array = 1:2:9
array =
13579
defines a variable named array (or assigns a new value to an existing variable with the name
array) which is an array consisting of the values 1, 3, 5, 7, and 9. That is, the array starts at 1
(the init value), increments with each step from the previous value by 2 (the increment value),
and stops once it reaches (or to avoid exceeding) 9 (the terminator value).
>> array = 1:3:9
array =
147
the increment value can actually be left out of this syntax (along with one of the colons), to
use a default value of 1.
>> ari = 1:5
ari =
12345
assigns to the variable named ari an array with the values 1, 2, 3, 4, and 5, since the default
value of 1 is used as the incrementer.
Indexing is one-based[7], which is the usual convention for matrices in mathematics. This is
atypical for programming languages, whose arrays more often start with zero.
Matrices can be defined by separating the elements of a row with blank space or comma and
using a semicolon to terminate each row. The list of elements should be surrounded by
square brackets: []. Parentheses: () are used to access elements and subarrays (they are
also used to denote a function argument list).
>> A = [16 3 2 13; 5 10 11 8; 9 6 7 12; 4 15 14 1]
A=
16 3 2 13
5 10 11 8
9 6 7 12
4 15 14 1
>> A(2,3)
ans =
11
Sets of indices can be specified by expressions such as "2:4", which evaluates to
[2, 3, 4]. For example, a submatrix taken from rows 2 through 4 and columns 3 through 4 can
be written as:
>> A(2:4,3:4)
ans =
11 8
7 12
14 1
A square identity matrix of size n can be generated using the function eye, and matrices of
any size with zeros or ones can be generated with the functions zeros and ones,
respectively.
>> eye(3)
ans =
100
010
001
>> zeros(2,3)
ans =
000
000
>> ones(2,3)
ans =
111
111
Most MATLAB functions can accept matrices and will apply themselves to each element. For
example, mod(2*J,n) will multiply every element in "J" by 2, and then reduce each
element modulo "n". MATLAB does include standard "for" and
"while" loops, but using MATLAB\'s vectorized notation often produces code that
is easier to read and faster to execute. This code, excerpted from the function magic.m,
creates a magic square M for odd values of n (MATLAB function meshgrid is used here to
generate square matrices I and J containing 1:n).
[J,I] = meshgrid(1:n);
A = mod(I+J-(n+3)/2,n);
B = mod(I+2*J-2,n);
M = n*A + B + 1;
Semicolon
Unlike many other languages, where the semicolon is used to terminate commands, in
MATLAB the semicolon serves to suppress the output of the line that it concludes.
Graphics
Function plot can be used to produce a graph from two vectors x and y. The code:
x = 0:pi/100:2*pi;
y = sin(x);
plot(x,y)
produces the following figure of the sine function:
Three-dimensional graphics can be produced using the functions surf, plot3 or mesh.
[X,Y] = meshgrid(10:0.25:10,-10:0.25:10);
[X,Y] = meshgrid(10:0.25:10,-10:0.25:10);
f=
sinc(sqrt((X/pi).^2+(Y/pi).^2));
f=
sinc(sqrt((X/pi).^2+(Y/pi).^2));
mesh(X,Y,f);
surf(X,Y,f);
axis([-10 10 -10 10 -0.3 1])
axis([-10 10 -10 10 -0.3 1])
xlabel(\'{\bfx}\')
xlabel(\'{\bfx}\')
ylabel(\'{\bfy}\')
ylabel(\'{\bfy}\')
zlabel(\'{\bfsinc} ({\bfR})\')
zlabel(\'{\bfsinc} ({\bfR})\')
hidden off
This code produces a
wireframe 3D plot of the twodimensional unnormalized
sinc function:
This code produces a
surface 3D plot of the twodimensional unnormalized
sinc function:
Object-Oriented Programming
MATLAB\'s support for object-oriented programming includes classes, inheritance, virtual
dispatch, packages, pass-by-value semantics, and pass-by-reference semantics.[8]
classdef hello
methods
function doit(this)
disp(\'hello\')
end
end
end
When put into a file named hello.m, this can be executed with the following commands:
>> x = hello;
>> x.doit;
hello
Limitations
For a long time there was criticism that because MATLAB is a proprietary product of The
MathWorks, users are subject to vendor lock-in.[9][10] Recently an additional tool called the
MATLAB Builder under the Application Deployment tools section has been provided to
deploy MATLAB functions as library files which can be used with .NET or Java application
building environment. But the drawback is that the computer where the application has to be
deployed needs MCR (MATLAB Component Runtime) for the MATLAB files to function
normally. MCR can be distributed freely with library files generated by the MATLAB compiler.
MATLAB, like Fortran, Visual Basic and Ada, uses parentheses, e.g. y = f(x), for both
indexing into an array and calling a function. Although this syntax can facilitate a switch
between a procedure and a lookup table, both of which correspond to mathematical
functions, a careful reading of the code may be required to establish the intent.
Many functions have a different behavior with matrix and vector arguments. Since vectors
are matrices of one row or one column, this can give unexpected results. For instance,
function sum(A) where A is a matrix gives a row vector containing the sum of each column of
A, and sum(v) where v is a column or row vector gives the sum of its elements; hence the
programmer must be careful if the matrix argument of sum can degenerate into a single-row
array.[11] While sum and many similar functions accept an optional argument to specify a
direction, others, like plot,[12] do not, and require additional checks. There are other cases
where MATLAB\'s interpretation of code may not be consistently what the user
intended[citation needed] (e.g. how spaces are handled inside brackets as separators where
it makes sense but not where it doesn\'t, or backslash escape sequences which are
interpreted by some functions like fprintf but not directly by the language parser because it
wouldn\'t be convenient for Windows directories). What might be considered as a
convenience for commands typed interactively where the user can check that MATLAB does
what the user wants may be less supportive of the need to construct reusable code.[citation
needed]
Array indexing is one-based which is the common convention for matrices in mathematics,
but does not accommodate any indexing convention of sequences that have zero or negative
indices. For instance, in MATLAB the DFT (or FFT) is defined with the DC component at
index 1 instead of index 0, which is not consistent with the standard definition of the DFT in
any literature. This one-based indexing convention is hard coded into MATLAB, making it
difficult for a user to define their own zero-based or negative indexed arrays to concisely
model an idea having non-positive indices.
Code written for a specific release of MATLAB often does not run with earlier releases as it
may use some of the newer features. To give just one example: save(\'filename\',\'x\') saves
the variable x in a file. The variable can be loaded with load(\'filename\') in the same
MATLAB release. However, if saved with MATLAB version 7 or later, it cannot be loaded with
MATLAB version 6 or earlier. As workaround, in MATLAB version 7 save(\'filename\',\'x\',\'v6\') generates a file that can be read with version 6. However, executing
save(\'filename\',\'x\',\'-v6\') in version 6 causes an error message.
Interactions with other languages
MATLAB can call functions and subroutines written in the C programming language or
Fortran. A wrapper function is created allowing MATLAB data types to be passed and
returned. The dynamically loadable object files created by compiling such functions are
termed "MEX-files" (for MATLAB executable). [13][14]
Libraries written in Java, ActiveX or .NET can be directly called from MATLAB and many
MATLAB libraries (for example XML or SQL support) are implemented as wrappers around
Java or ActiveX libraries. Calling MATLAB from Java is more complicated, but can be done
with MATLAB extension[15], which is sold separately by MathWorks.
Through the MATLAB Toolbox for Maple, MATLAB commands can be called from within the
Maple Computer Algebra System, and vice versa.
Alternatives
MATLAB has a number of competitors.
There are free open source alternatives to MATLAB, in particular GNU Octave, FreeMat, and
Scilab which are intended to be mostly compatible with the MATLAB language (but not the
MATLAB desktop environment). Among other languages that treat arrays as basic entities
(array programming languages) are APL and its successor J, Fortran 95 and 2003, as well
as the statistical language S (the main implementations of S are S-PLUS and the popular
open source language R).
There are also several libraries to add similar functionality to existing languages, such as
Perl Data Language for Perl and SciPy together with NumPy and Matplotlib for Python.
See also: list of numerical analysis software and comparison of numerical analysis software
Release history
version[16] release Year
name
MATLAB R?
1.0
1984
MATLAB 2 R?
1986
MATLAB 3 R?
1987
MATLAB R?
3.5
1990
MATLAB 4 R?
1992
MATLAB R7
4.2c
1994
MATLAB R8
5.0
1996
MATLAB R9
5.1
1997
MATLAB R9.1
5.1.1
MATLAB R10
5.2
1998
MATLAB R10.1
5.2.1
MATLAB R11
5.3
1999
MATLAB R11.1
5.3.1
MATLAB R12
6.0
2000
MATLAB R12.1
6.1
2001
MATLAB R13
6.5
2002
MATLAB R13SP1 2003
6.5.1
MATLAB R13SP2
6.5.2
MATLAB 7 R14
2004
MATLAB R14SP1
7.0.1
MATLAB R14SP2 2005
7.0.4
MATLAB R14SP3
7.1
MATLAB R2006a 2006
7.2
MATLAB R2006b
7.3
MATLAB R2007a 2007
7.4
MATLAB R2007b
7.5
MATLAB R2008a 2008
7.6
MATLAB R2008b
7.7
MATLAB R2009a 2009
7.8
DOWNLOAD