Paper Title (use style: paper title)
advertisement
")
Optimal Control of Piecewise Affine Systems
Majid akbarian
Najmeh Eghbal
Naser Pariz
Department of Electrical Engineering
Department of Electrical Engineering
Department of Electrical Engineering
Ferdowsi university of mashhad
Iran,mashhad
akbarian@stu.um.ac.ir
sadjjad university of technology
Iran,mashhad
najmeh.eghbal@sadjad.ac.ir
Abstract—In this paper we discuss the issue of optimal control of
piecewise affine systems based on discontinuous quadratic
Lyapunov function, given the stability of the said system, first we
calculate the upper bound of the cost function, then we consider
the control input as the state feedback and finally, by minimizing
the upper bound of the cost function, the state feedback
coefficients are calculated. Note that if we minimize upper bound
the cost function is minimized. It is worth noting that the
optimization problem is turned into a semidefinite programming
problem with bilinear constraints. These problems can be solved
using numerical or any other methods. Finally, to check the
effectiveness of the method, we have listed a numerical example.
I.
INTRODUCTION
Hybrid systems are dynamical systems with continuous time and
discrete components. These systems can be used for modeling
industrial processes. Piecewise affine systems are a subset of hybrid
systems and their equivalence with other classes of the hybrid systems
are shown [1]. Piecewise affine systems are an important category for
modeling of complex and nonlinear systems, because many of such
nonlinear systems such as saturated and etc. are inherently modeled in
form of piecewise affine systems or can be approximated as a
piecewise affine system [2]. Therefore, piecewise affine systems are
an important tool and a starting point for studying nonlinear systems.
These systems are defined by a series of linear systems that are defined
by polyhedral in each region. In references [3] and [4] you can see the
application of these systems in power electronics and process control.
Furthermore, a wide range of nonlinear systems in engineering
applications can be modeled using a piecewise affine system [5]. On
the other hand,, the stability and performance analysis of the piecewise
affine systems can be formulated and easily solved in the form on
convex problems that are easily solved by numerical methods and this
is an advantage for these systems. Analysis and controller design
problems for piecewise affine systems has been a subject of debate
over recent years and has been one of the most challenging issues in
the field. Controllability and observability of these systems are
discussed in reference [6]. Stability and synthesis analysis of
piecewise affine systems are discussed in references [7] and [8]. In
these cases stability is expressed in the form of linear matrix
inequalities. In reference [9] controller design is done based on the
output feedback and controller is obtained by solving a series of
bilinear matrix inequalities that are solved using numerical algorithms.
Quadratic controls of piecewise affine systems are discussed in
reference [10]. Gain calculation of L2 for piecewise affine systems is
done in [11] and [12].Optimal control of switch affine systems
discussed in [15] and [18].Optimal control of switch Hybrid systems
discussed in reference [16].In reference [17] and [19] and [21]optimal
Ferdowsi university of mashhad
n-pariz@um.ac.ir
Iran,mashhad
control of discrete piecwise affine systems obtained.In reference [20]
optimal control of switch affine systems with dynamic programming
obtained.But optimal control of these systems using the state feedback
is not performed and this prompted us to perform this research. Here,
the cost function is considered of Linear Quadratic Regulator (LQR)
for a closed-loop system. The goal is controlling the state feedback in
such a way that it stabilizes the closed-loop system and reduces the
cost function to a minimum. Initially we discuss the conditions of
stability in a piecewise affine systems, then we generalize these
conditions to a closed-loop system based on discontinuous Lyapunov
function. These conditions are expressed in terms of linear matrix
inequalities. Then we prove a theorem and we use it to calculate the
upper bound of the cost function. In the end based on the discontinuous
Lyapunov function, the optimal controller design problem will become
a semi-definite programming optimization problem with bilinear
constraint which can be solved by genetic algorithm or numerical
algorithms.All the previos works in fact designed optimal control for
switch-affine systems or for discrete piecwise affine systems or the
way they are used to design optimal control is limited and we cant
increase the number of optimal control designe constraints but the
method mentioned in this paper is not limited.
II.
DEFINITIONS,STABILITY ANALYIS AND UPPER BOUND
In this section, the definitions and backgrounds necessary for
studying the next sections are described. Then we discuss the
necessary conditions for stability analysis and , we obtain an
upper bound for the cost function introduced
A. Positive Matrix
The A = [a ij ], i, j = 1, … , n matrix is called a positive matrix
when ∀i, j a ij > 0 is similarly defined as negative matrix.
B. Definite positive matrix
Matrix A = [a ij ], i, j = 1, … , n is called definite positive if
∀xϵRn , x T Ax > 0 and the notation A > 0 is used to show it. In
the same way, definite negative matrix is also defined.
C. piecewise affine systems
The mathematical description of PWA class in general is
ẋ = a i + Ai x + Bi u
(1)
{
for xϵXi
y = c i + C i x + Di u
In which Xi shapes the designated areas and their collection is
a partitioned space of the state. According to the type of
partitioning systems of the PWA, there are two types of PWA,
multi-faceted and oval.
Xi = {xϵR2 , Ei x ≥ ei } iϵI
(2)
In (1) and (2) Ei and ei of the matrix and vector are appropriate
to the size.
It’s worth noting that system (1) assuming Bi = 0 turns into a
piecewise linear system as follows:
(3)
𝑥̇ = 𝑎𝑖 + 𝐴𝑖 𝑥 for 𝑥𝜖𝑋𝑖
The border of neighboring areas X i and Xj is defined as
ifXi ∩ Xj ≠ ∅ thenXi ∩ Xj ⊆ {x|x = Fij s + fij , sϵR}
(4)
x
Using the notation x̅ = ( ) and E̅i = [Ei − ei ] we’ll have
1
(5)
x̅̇=A̅i x̅ forx̅ ϵX i
(6)
X̅i = {x ∈ R2 , E̅i x̅ ≥ 0}
s
(7)
̅̅̅ij s̅ , s̅ ϵR, s̅ = ( )}
Xi ∩ Xj ⊆ {x|x̅ = F
1
F
f
(8)
̅̅̅
Fij =( ij ij )
0 1
Where Ni = {k ∈ I, k ≠ i, X̅i ⋂X̅j ≠ ∅}
(16)
E. Calculating the upper bound
Thorem 2:
For the system (5) if the conditions of therom (1) is met and the
inequality is established, then the upper bound for cost function
∞
j = ∫0 x(t)T Q i x(t)dt Q i > 0 is calculated [14]:
̅̅̅i Ei < 0
(17)
i ∈ I0 Pi Ai + Ai T Pi + Q i + Ei T ̅W
T
T
̅̅̅i E̅i < 0
i ∈ I1 P̅i A̅i + A̅i P̅i + ̅̅̅
Q i + E̅i ̅W
(18)
Proof: Suppose that we prove i ∈ I1 for the therom, another
proof is the same. We multiply the said inequality in X from
left and right and remove of non-negative terms. Then we take
the integral of the expression that we desire in the interval
[0, ∞]:
T
T
̅̅̅i E̅i x̅ < 0
x̅ T P̅i A̅i x̅ + x̅ T A̅i P̅i x̅ + x̅ T ̅̅̅
Q i x̅ + x̅ T E̅i ̅W
T
̅̅̅̅i E̅i x̅ < 0
x̅ T P̅i x̅̇ + x̅̇ T P̅i x̅ + x̅ T ̅̅̅
Q i x̅ + x̅ T E̅i W
D. Stability Analysis
Thorem 1:
̅̅̅i are unknown matrices with non-negative
Suppose U̅i and ̅W
elements and appropriate dimensions and (k=1,2) ̅̅̅̅
ωij k are
unknown vectors with appropriate dimensions and nonnegative elements and (i∈I) p̅i ϵR3×3 is a symmetric matrix,
then we define following variables [13]
T
T
̅̅̅̅
Hij = E̅i ̅̅̅̅
ωij1 ̅̅̅
Cij A̅i +E̅j ̅̅̅̅
ωij 2 ̅̅̅
Cij A̅j
T
L̅i =E̅i U̅i E̅i
(9)
̅̅̅i =E̅i T W
̅̅̅̅i E̅i
M
̅̅̅̅i matrices and
If there is a choice between P̅i and U̅i and W
k
(k=1,2) ̅̅̅̅
ωij vectors that can establish the following restrictions,
then for system defined by equation (5) all the trajectory
starting at X will exponentially converges to origin.
p 0
(10)
P̅i = ( i
) > 0for iϵI0
0 o
(11)
P̅i − L̅i > 0 for iϵI1 i∉ I0
I
(In 0)(P̅i − L̅i ) ( n ) > 0
0
∀i ∈ I0
T
A̅i P̅i +P̅i A̅i + ̅̅̅
Mi < 0 ∀i ∈ I, i ∉ I0
T
I
(In 0) (A̅i P̅i + P̅i A̅i + ̅̅̅
Mi ) ( n ) < 0
0
∀i ∈ I0
T
T
T
̅̅̅
̅̅̅ij = ̅̅̅
̅̅̅̅ij + ̅̅̅̅
̅̅̅ij ∀i ∈ I, j
Fij (P̅i − P̅j )F
Fij (H
Hij ) F
∈ Ni , where Fij ≠ 0
(12)
(13)
(14)
(15)
d T
T
̅̅̅i E̅i x̅ < 0
(x̅ P̅i x̅) + x̅ T ̅̅̅
Q i x̅ + x̅ T E̅i ̅W
dt
T
̅ ≥0⟹
̅̅̅̅i E̅i x)
(x̅ T E̅i W
d T
(x̅ P̅i x̅) + x̅ T ̅̅̅
Q i x̅ ≤ 0
dt
∞
d
∫ [ (x̅ T P̅i x̅) + x̅ T ̅̅̅
Q i x̅] dt ≤ 0
0 dt
̅̅x̅] |∞ + j ≤ 0
[x̅ T ̅P̅i0
0
T
̅̅i0
̅̅̅̅̅̅̅̅
0 − ̅̅̅̅̅̅
x(0) P
x(0) + j ≤ 0
̅̅̅̅̅̅̅̅
j ≤ ̅̅̅̅̅̅
x(0)T ̅P̅i0
x(0)
̅̅i0
̅̅̅̅̅
̅̅i0
̅̅L̅i )
E(j) ≤ E (tr(P
x0 ̅̅̅
x0 T )) = ∑ αi tr(P
(19)
i∈I
E(x0 x0 T ) x0 ∈ Xi , i ∈ I0
Li = {
E(x̅̅̅0 ̅̅̅
x0 T ) x0 ∈ Xi , i ∈ I1
(20)
You may notice in the above inequalities that all of them are a
series of linear matrix inequalities in relation to the variables Pi
and (P̅i ). Therefore, stability conditions for a closed-loop
system are a series of linear matrix inequalities in relation to Pi
and (P̅i ) and they are convex optimization problems that can be
solved using numerical methods. Pay attention that because the
cost function is dependent on the initial point, and this point is
unknown and a random variable, we assume that the initial
point of a random variable is monotonous with distribution, so
that the dependency is eliminated. Operator E expresses the
expected value and αi represents the probability that x0 belongs
to area Xi . Since we considered the initial state as a monotonous
random variable, therefor the probability of αi and the
covariance matrix Li can be determined using the desired area’s
information and the partition Xi .
III.
OPTIMAL CONTROL DESIGN
In this section we describe the optimal controller design issues
for piecewise affine systems using the state feedback. We
assume that the designated system balance point is the initial
point. Consider the system described with equations (1), in this
case assume that state feedback controller is u(t) = K i x(t). The
closed loop system takes the form below:
ẋ = (Ai + Bi K i )x(t) + a i
(21)
{
x(t 0 ) = x0
We consider the cost function as:
∞
j(x0 , u) = ∫ [x(t)T Q i x(t) + u(t)T R i u(t)]dt
(22)
0
With the consideration of the appropriate state feedback, the
cost functions comes in the form of:
∞
(23)
j = ∫ [x(t)T (Q i + K i T R i K i )x(t)]dt
0
∞
T
j = ∫ (x(t)T 1) (Q i + K i R i K i
0
0
0) (x(t)) dt
1
0
∞
̅̅̅i ̅̅̅̅̅
j = ∫0 ̅̅̅̅̅
x(t)T Q
x(t)dt
(24)
(25)
T
T
̅̅̅i E̅i < 0
i ∈ I1 P̅i A̅i + A̅i P̅i + ̅̅̅
Q i + E̅i ̅W
(29)
̅̅̅̅̅̅T P
̅̅̅̅̅̅
̅̅i0
̅̅x(0)
In this case we’ll have: j ≤ x(0)
Proof: To prove this therom in therom 2, we convert Ai to Ai +
Bi K i . Now we can merge therom 1 and 3 and generally express
the result in terms of therom 4:
Therom 4:
For the system defined by equations (26) if the following
conditions are met, then the system for each respective system
trajectory exponentially convergent origin and
j≤
̅̅̅̅̅̅
̅̅̅̅̅̅̅̅
x(0)T ̅P̅i0
x(0)
p 0
(30)
i ∈ I0 P̅i = ( i
)>0
0 o
(P̅i − L̅i ) > 0
T
(A̅i P̅i + P̅i A̅i + ̅̅̅
Mi ) < 0
A
+
B
0
iKi
A̅i = ( i
)
0
0
T
Pi (Ai + Bi K i ) + (Ai + Bi K i ) Pi + Q i + K i T R i K i
̅̅̅i Ei < 0
+Ei T ̅W
i ∈ I1
P̅i − L̅i > 0
T
A̅i P̅i +P̅i A̅i + ̅̅̅
Mi < 0
T
T
̅̅̅i E̅i < 0
P̅i A̅i + A̅i P̅i + ̅̅̅
Q i + E̅i ̅W
A + Bi K i a i
A̅i = ( i
)
0
0
for x ∈ Xi ∩ Xj we have
T
T
̅̅̅ij T (P̅i − P̅j )F
̅̅̅ij = ̅̅̅
̅̅̅̅ij + ̅̅̅̅
̅̅̅ij ∀i ∈ I, j
F
Fij (H
Hij ) F
(31)
(32)
(33)
(34)
(35)
(36)
(37)
(38)
(39)
∈ Ni , where Fij ≠ 0
Using the notations of equation (21), it gives:
̇ = (Ai + Bi K i a i ) x(t)
̅̅̅̅̅
̅̅̅̅̅
x(t)
0
0
A + Bi K i
A̅i = ( i
0
ai
)s
0
(26)
(27)
By applying the said changes in the form of the equations,
therom 2 for the system (26) is rewritten as:
Therom 3:
For the system (26) with (assuming that the system is stable) if
the equations (30-41) are met, then the upper bound for the
equation (22) is obtained:
(28)
i ∈ I0 Pi (Ai + Bi K i ) + (Ai + Bi K i )T Pi + Q i +
̅̅̅i Ei < 0
K i T R i K i + Ei T ̅W
Where Ni = {k ∈ I, k ≠ i, X̅i ⋂X̅j ≠ ∅}
(40)
(Ai + Bi K i )x(t) + a i = (Aj + Bj K j )x(t) + a j ⟹
A + Bj K j a j x
A + Bi K i a i x
( i
) ( )=( j
)( )
0
0 1
0
0 1
̅̅̅ij s̅ , s̅ ϵR, s̅ = ( s )}
Xi ∩ Xj ⊆ {x|x̅ = F
1
Fij fij
̅̅̅
Fij =(
)⟹
0 1
̅̅̅ij
A̅i ̅̅̅
Fij = A̅j F
(41)
̅̅̅̅̅̅̅̅
j ≤ ̅̅̅̅̅̅
x(0)T ̅P̅i0
x(0) ⇒
̅̅i0
̅̅̅̅̅
̅̅i0
̅̅L̅i )
E(j) ≤ E (tr(P
x0 x̅̅̅0 T )) = ∑i∈I αi tr(P
(42)
E(x0 x0 T ) x0 ∈ Xi , i ∈ I0
Li = {
E(x̅̅̅0 ̅̅̅
x0 T ) x0 ∈ X i , i ∈ I1
(43)
K1 = (
Finally, for optimal control design, the coefficient K i must be
calculated. To calculate these coefficients we consider a
controller that minimizes the upper bound of cost function
̅̅i0
̅̅L̅i ). So the desired optimization problem that leads
∑i∈I αi tr(P
to the controller design is as follows:
−4.8810
−1.6288
−3.3435
)
1.0198
K3 = (
−3.3782
2.9428
−3.3782
)
2.9428
Joptimal=0.1698
i∈I
K i ϵK
(30) − (41)
To solve optimization problem we use genetic algorithm for
selecting the variable Ki. After defining Ki, the optimization
problem is converted to a linear matrix inequality form which
can be solved as a semi-definite programming problem
30
subject to {
IV.
3.1029
)
−0.0499
K2 = (
̅̅i0
̅̅L̅i ) )
(∑ αi tr(P
min
0.6882
−0.3061
20
10
0
-10
NUMERICAL EXAMPLE
-20
Consider System (1) with grade 2 and 𝑖 = 1,2,3 and
the following matrices:
1
0
1
0
1
) , A2 = (
) , A3 = (
)
−0.1
1 −0.1
0 −0.1
0
0
1 0
a1 = −a 3 = ( ) , a 2 = ( ) , B1 = B2 = 𝐵3 = (
)
−1
0
0 1
X1 = {x|x1 ϵ[−2, −1]}, X2 = {x|x1 ϵ[−1,1]},
X3 = {𝑥⌊𝑥1 𝜖[1,2]}
-30
-40
2
0
A1 = (
0
Suppose that the initial state 𝑥1 (0) is a random variable with
monotonous distribution in the interval [−2,2]. We assume the
cost function as equation (22) and assume 𝑅𝑖 = 1 and 𝑄𝑖 = 1.
We consider the control coefficient in interval [−5,5]. It
becomes clear that the source is located in region 𝑋2 and the
closed loop system is unstable. Matrices 𝐸1 and 𝐸2 and 𝐸3 and
𝑒1 and 𝑒2 and 𝑒3 are calculated as:
1 0
1 0
1 0
𝐸1 = (
) , 𝐸2 = (
) , 𝐸3 = (
),
−1 0
−1 0
−1 0
−2
−1
1
𝑒1 = ( ) , 𝑒2 = ( ) , 𝑒3 = ( )
1
−1
−2
0
-2
0
0
𝐶12 = (1 0),𝐶23 = (1 0), 𝐹12 = ( ), 𝐹23 = ( )
1
1
−1
1
𝑐12 = (1); 𝑐23 = (−1), 𝑓12 = ( ), 𝑓23 = ( )
0
0
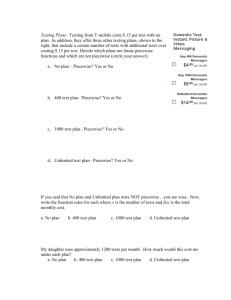
After the simulation, the appropriate control coefficients are
obtained as follows. Also, the appropriate Lyapunov function
for region X2 is demonstrated in figure (1):
0
-1
1
2
x1
Figure 1: lyapunov for region 𝑋2
V.
CONCLUSION
In this paper, we introduced a class of hybrid systems that
are able to model a wide range of practical systems, then we
discussed the mathematical description of affine linear systems
and stability conditions of piece wise affine systems in form of
terms of linear matrix inequalities and then calculated the upper
bound of the cost function. In fact, theroms 3 and 4 are one the
innovations of this article. We proved that the problem of
optimal control of piece wise affine systems leads to solving an
optimization problem with bilinear constraints. Then, by
minimizing the upper bound and use of genetic algorithms and
semi-definite programming we can calculate the controller
coefficients. In the end, we demonstrated the effectiveness of the
methods listed by using a numerical example.
REFERENCES
Also, the parameters required to analyze the stability using
therom (1) are:
-2
[1]
[2]
[3]
W. P. M. H. Heemels, B. de. Schutter, and A. Bemporad. Equivalence of
hybrid dynamical models. Automatica, 37:1085–1091, 2001.
R. Lin, J.-N.; Unbehauen. Canonical piecewise-linear approximations.
IEEE Trans. on Circuit and Systems I: Fundamental theory and
applicatons, 39(8):697 – 699, Aug 1992
M.senesky,G.Eirea,and T.John Koo,2003,”Hybrid modeling and control
of power electronics”,Hybrid systems:computer Science,SpringerVerlag:Berlin,in the proceeding of 6th International Workshop,pp.450465
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
[15]
[16]
[17]
[18]
[19]
[20]
[21]
Panagiotis D.Christofides and Nael H.El-Farra,Control of Nonlinear and
Hybrid Process systems Design for Uncertainty ,Constraints and TimeDelays(Lecture Notes in control and Imformation Sciences 324),Springer
–Verlag Berlin Heidelberg,2005.
A.Bempporad,A.Garulli,S.Paoletti,and
A.Vicino.A
boundederror
approach to piecewise affine system identification.IEEE Trans.on
Automatic Control,50(10):1567-1580,2005
A.Bempporad,G.Ferrari-Trecate,M.Morari”Observability
and
controllability of piecewise affine and hybrid systems.”IEEE
Transactions on Automatic control 2000;45(10):1864-1876.
M.Johansson and A.Rantzer.computation of piecewise quadratic
Lyapunov functions for hybrid systems.IEEE Transactions on Automatic
Control,43(4):555-559,April 1998
S.Pettersson.Modelling control and stability Analysis of Hybrid
systems.Licentiate thesis,Chalmers University of Technology,November
1996.
J.Zhang and W.Tang.”Output feedback optimal guaranteed cost control
of uncertain piecewise linear systems ”INTERNATIONAL JOURNAL
OF ROBUST AND NONLINEAR CONTROL Int.J.Robust Nonlinear
Control 2009;19:569-590 Published online 4 June 2008 in Wiley
InterScience
S.P.Banks and S.A.Khathur.Structure and control of piecewise linear
systems.International Journal of control,50(2):667-686,1989
M.R.James and S.Yuliar.Numerical approximation of the 𝐻∞ norm for
nonlinear systems.Automatica,31:1075-1086,1995.
A.J.vander schaft 𝐿2 -gain analysis of nonlinear systems and nonlinear
state feedback 𝐻∞ control.IEEE Transactions Aumatica
Control,37(6770-784),1992
N.Eghbal,N.Pariz and A.Karimpour.”Discontinuous piecewise quadratic
Lyapunov function for planar piecewise affine systems”Journal of
Mathematical Analysis and Applications.399(2013)586-593
A.Rantzer,M.Johansson.”Piecewise linear quadratic optimal conrol”
IEEE Transactions on Aumatica Control 2000;45(4):629-637.
H.W.J.Lee,K.L.Teo,V.Rehbock,L.S.Jennings”Control parametrization
enhancing
technique
for
optimal
discrete-valued
control
problems”Elsevier Science on Aumatica 35(1999)1401-1407
F.Zhu,P.J.Antsaklis”Optimal
Control
of
Switch
Hybrid
Systems”Interdisciplinary studies in Intelligent systems July 2013
M.Baric,P.Grieder,M.Baotic,M.Morari,”An efficient algoritm foroptimal
control of PWA systems
with polyhedral performance
indices”Science Direct on Automatica(2007).
J.Imura”Optimal control of sampled-data piecwise affine systems”
Elsevier Science on Aumatica 40(2004)661-669
S.V.Rakovic,E.C.Kerrigan,D.Q.Mayne”Optimal control of constrained
piecwise
affine systems with stste-and input-dependent
disturbances”Research supported by the enginearing and physical
sciences research council and the royal academy of enginearing UK
P.Riedinger,C.Iung,F.Kratz”An Optimal Control Approach for Hybrid
Systems”European Journal of Control(2003)9:449-458
“Optimal Control of Piecewise Affine Systems “Doctor of Sciences
presented by MATO BAOTIC