Understanding the USEPA`s AERMOD Modeling System
advertisement

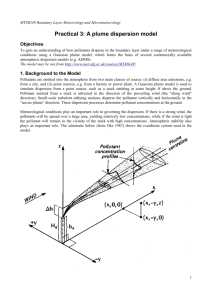
Understanding the USEPA’s AERMOD Modeling System By Ashok Kumar Department of Civil Engineering University of Toledo Toledo, OH 43606 April 2004 ACKNOWLEDGEMENTS The author would like to thank Lakes Environmental Inc. for providing a copy of the software and the Ohio EPA for providing emission inventory and monitoring data. Mention of products in this report should not be considered as an endorsement. OVERVIEW This course emphasizes the basic elements of AERMOD modeling system that are needed in modeling negotiations and in managing the modeling projects. The course will cover the structure, input data requirements, theoretical framework, and the output from the modeling system. New terms introduced by the AERMOD model will be explained. The course is intended for environmental managers with little or no familiarity of air quality modeling. The participants can expect to gain familiarity with 1) AERMOD modeling system, 2) input data, 3) the theory to compute concentrations under different conditions, and 4) results for air quality assessment studies. The emphasis during the course will be on the model inputs that affect the modeling results. TABLE OF CONTENTS 1. INTRODUCTION 1.1 1.2 1.3 What is a model? What is air quality modeling? AERMOD model and its characteristics 2. REVIEW OF TERMS USED DURING MODELING 3. INPUT DATA REQUIREMENTS 3.1 3.2 3.3 3.4 AERMET and AERMAP Coordinate System Terrain Surface Roughness 4. CONCENTRATION CALCULATIONS 4.1 4.2 4.3 4.4 4.5 4.6 Concept of plume penetration Plume rise Estimation of dispersion coefficients Concentration predictions in convective layer Concentration predictions in stable layer Building Downwash 1. INTRODUCTION Air Quality Modeling is an attempt to predict or simulate the ambient concentrations of contaminants in the atmosphere. These models are used primarily as a quantitative tool to correlate cause and effect of concentration levels found in an area. They are also used to support laws and/or regulations designed to protect air quality. The models have been the subjects of extensive evaluation to determine their performance under a variety of meteorological conditions [1, 2, 3, and 4]. The United States Environmental Protection Agency (EPA) has been working on this topic over the last three decades. They have proposed a number of models to simulate air quality under different scenarios [5]. One of the most recent proposals is AERMOD model for industrial sources. AERMOD will become the EPA preferred regulatory model [6]. 1.1 WHAT IS A MODEL? A model is a way of expressing the relationship between the different variables of a system in mathematical terms. Models can be as simple as an algebraic equation or they could involve solutions of coupled partial differential equations using super computers. Development of a typical model includes identification of system variables, establishing relationships between variables, model testing and evaluation using real life data and revising model equations based on evaluation. This process continues till one is satisfied with the performance of the model in simulating real life results. 1.2 WHAT IS AIR QUALITY MODELING? Pollutants are continuously released from numerous sources into the atmosphere. The pollution sources could be point sources (e.g., stacks or vents), area sources (e.g., landfills, ponds, storage piles), or volume sources, (e.g.: conveyers, structures with multiple vents). The dispersion of the pollutants in the atmosphere emitted from these sources depends on various factors. These factors can be classified into two main categories. Source characteristics: Emission rate of pollutant Stack height Exit velocity of the gas Exit temperature of the gas Stack diameter Meteorological Conditions: Wind velocity Wind direction Ambient temperature Atmospheric stability Mixing height Based on the clean air regulations in the United States, states regulate the pollutant emissions from the various potential sources. All sources are classified as major or minor sources based on their amount of emissions released per year. The resulting concentrations of the pollutant emitted from a source must be estimated for air quality assessments at different locations around the source. There are two basic approaches to solve air quality problems from stacks and vents. They are: (i) theoretical approach, and; (ii) experimental approach. Each approach has its own advantages and disadvantages. Theoretical studies include analytical/numerical solutions to several appropriate equations that represent the physics of the pollutant downwind concentrations. These equations can be very simple or extremely complex depending upon the desired accuracy and the need for estimating ground level concentrations. Obviously, without comparison with real life data, the usefulness of theoretical models is limited. Air quality models that are developed are compared with available experimental studies to evaluate the performance of the model. Experimental studies include field studies, wind tunnel studies, and water tank studies. Field studies are likely to be most accurate of the two approaches, as they involve direct measurement of pollutant concentrations at strategically located receptors. The disadvantage of field studies is that they are expensive to conduct and typically require long lead times. One cannot place any control on Mother Nature for a certain condition on a given day. Wind tunnel and water tank studies are physical simulations of actual field study experiments. Again, scientists have found that it is extremely expensive to simulate exact external atmospheric conditions in a typical wind tunnel or water tank study. Specifically, difficulty is faced in satisfying the conditions of similarities (i.e. scaling requirements) and the limitation of instruments to measure turbulence, mixing height, atmospheric stability, and other parameters. The concentrations of the pollutant at desired locations from an industrial source can be found by establishing monitoring stations. However, the cost of setting up monitoring stations at all desired locations around a source is high. Generally, for regulatory work a modeling approach is an acceptable alternative to determine the resulting concentrations of a pollutant at various locations around the source. This technique of estimating the atmospheric dispersion of the pollutant and the resulting concentrations at various locations using the source characteristics and the meteorological conditions is known as dispersion modeling. The results from the dispersion modeling are also used in the preparation of health risk assessments. A number of dispersion models are available in the Support Center for Regulatory Air Models (SCRAM) section of the United States Environmental Protection Agency (US EPA) Internet site for different applications depending on the source type, meteorological conditions, the type of study and other factors. The US EPA has published guidelines on choosing air quality models [5]. The various dispersion models are broadly classified into screening models and refined models. Most of the regulatory dispersion models use either the Gaussian Plume Algorithm or a variation of Gaussian Plume model. A widely used air quality model is the Industrial Source Complex (ISC) short term model. The model provides options to model emissions from a wide range of sources that might be encountered at a typical industrial source complex. The model accepts hourly meteorological data records to define the conditions for plume rise, transport, diffusion, and deposition. The model estimates the concentration or deposition value for each source and receptor combination for each hour of input meteorology, and calculates user selected short-term averages. For deposition values, either the dry deposition flux, the wet deposition flux, or the total deposition flux may be estimated. The total deposition flux is simply the sum of the dry and wet deposition fluxes at a particular receptor location. The user also has the option of selecting averages for the entire period of input meteorology. Gaussian models are practical, effective and used extensively to date. Their advantages are: They produce results that match closely with experimental data, They incorporate turbulence in an ad-hoc manner, They are simple in their mathematics, They are quicker than numerical models, and They do not require super computers. 1.3 AERMOD MODEL AND ITS CHARACTERISTICS AERMOD uses a Gaussian and a bi-Gaussian approach in its dispersion models [7]. It generates daily, monthly as well as annual concentrations of pollutants in ambient air. The model handles a variety of pollutant sources in a wide variety of settings such as rural and urban as well as flat and complex terrain. It is an updated version of the Industrial Source Complex (ISCST3) model being proposed by the USEPA for assessing air quality impact from industrial sources in coming years. One of the major improvements that AERMOD brings is its ability to characterize the planetary boundary layer (PBL) through both surface and mixed layer scaling. The AERMOD model contains many new or improved algorithms when compared to the ISCST3 model. Some of these are: Dispersion in both the convective and stable boundary layers, Plume rise and buoyancy, Plume penetration into elevated inversions, Treatment of elevated, near-surface, and surface level sources, Computation of vertical profiles of wind, turbulence, and temperature, Treatment of receptors on all types of terrain (from the surface up to and above the plume height) and complex terrain modeling computations, and Incorporation of the Plume Rise Model Enhancements (PRIME) building downwash algorithms AERMOD is actually a modeling system with three separate components: AERMOD (AERMIC Dispersion Model), AERMAP (AERMOD Terrain Preprocessor), and AERMET (AERMOD Meteorological Preprocessor). Figure 1 shows the general structure of AERMOD. The features of the AERMOD model are: i) concept of plume penetration, ii) estimation of dispersion coefficients, iii) estimation of plume rise, iv) concentrations predictions in convective layer, v) concentration predictions in stable layer, vi) handling of downwash, and vii) treatment of simple terrain and complex terrain. The options in AERMOD are basically the same as the ISCST3 model with a few exceptions. They are: Current version of the model only calculates concentration values. The US EPA has released a new review copy of the AERMOD model containing dry and wet deposition in March 2004. AERMOD requires two types of meteorological data files, a file containing surface scalar parameters and a file containing vertical profiles. These two files are produced by the AERMET meteorological preprocessor. A hill height scale along with the receptor elevation is required for elevated terrain applications. AERMAP terrain-preprocessor can be used to generate hill height scales as well as terrain elevations for all receptor locations. The model is applicable to primary pollutants and continuous releases of toxic and hazardous waste pollutants. Chemical transformation is treated by simple exponential decay. The information for the AERMOD model can be downloaded from the USEPA’s web site (http://www.epa.gov/scram001/tt26.htm#aermod) 2. REVIEW OF TERMS USED DURING MODELING The following terms are frequently used in air quality modeling. A brief description is given below: Lapse Rate The lapse rate is the rate of change of temperature with height and is defined as, Γ = -T/z The value of Γ varies throughout the atmosphere. Potential Temperature The temperature air would have if it was compressed, or expanded, adiabatically from a given state (p, T) to a pressure of 1000mb. Potential temperature is the temperature corresponding to the pressure po = 1000 mb, ≡ To = T * (p/1000) R/Cp The value of accounts for temperature as well as pressure. If increases with height atmosphere Atmospheric Stability Atmospheric stability is defined as the ability of the atmosphere to enhance or to resist atmospheric motions. Convective Boundary Layer Convective boundary Layer (CBL) development and maintenance depends on two factors: (i) convectively produced turbulence caused by solar heating of the surface and internal redistribution of heat under the cap of the stable layer, and (ii) mechanically produced turbulence originating from the vertical wind speed shear and the surface roughness. The figure given below shows the various physical processes involved in the CBL growth. Bowen Ratio: The ratio of heat energy used for sensible heating to heat energy used for latent heating. It varies from one place to another place and depends on the amount of surface moisture. The ratio is relatively high for a dry surface as compared to a moist surface. This is due to the fact that much of the absorbed solar radiation is used to vaporize water. Coriolis Force: A deflective force arising from the rotation of earth on its axis. Insolation: Incoming solar radiation. Mechanical Turbulence: Irregular, random motion of air triggered by obstacles and surface irregularities in the path of air flow. Meteorology: Scientific study of atmosphere and atmospheric processes. Turbulence: Irregular, random motions of air. Albedo: The fraction of the incoming solar radiation reflected and scattered back to the atmosphere. Table: Albedo of some common surface type SEASONS General Values LAND USE TYPE 0.03-1.0 Water surface 0.15-0.20 Deciduous forest Coniferous forest Swamp 0.05-0.15 Cultivated land Grassland 0.16-0.26 Urban Desert shrub land 0.25-0.30 Fresh snow 0.75-0.95 Spring Summer Autumn Winter 0.12 0.10 0.14 0.20 0.12 0.12 0.12 0.50 0.12 0.12 0.12 0.14 0.12 0.16 0.35 0.30 0.14 0.20 0.18 0.60 0.18 0.18 0.20 0.60 0.14 0.16 0.18 0.35 0.30 0.28 0.28 0.45 Source: USEPA reports Mixing height: The thickness of the surface layer of the troposphere in which the air is thoroughly mixed by convection. Radiation: Energy transport via electromagnetic waves capable of traveling through a vacuum. Soundings: Continuous altitude measurement of atmospheric variables. Thermal turbulence: Irregular, random motions of air triggered by unequal heating and cooling of the air. Surface roughness: Typical values of surface roughness are given in Table below. SURFACE ROUGHNESS VALUES SURFACE TYPE SURFACE ROUGHNESS PARAMETER zo (m) Centers of cities with very tall buildings Cities, forests and industrial complexes Outskirts of town Residential areas and agricultural crops Grass Water surfaces Natural snow over farmland Calm open sea 1.5-3.0 1 0.4 0.1 0.01 0.001 0.002 0.0001 AERMAP: AERMAP is a terrain preprocessor for AERMOD that allows the use of digital terrain data in AERMOD. AERMET: The meteorological preprocessor for AERMOD. It accepts NWS or onsite data. AERMIC: American Meteorological Society/Environmental Protection Agency Regulatory Model Improvement Committee. AERMOD: A new air dispersion model developed by AERMIC. It is intended to replace the ISCST model. Ambient Air: Air around us. AMS: American Meteorological Society. AP-42: A compilation of emission factors and process description for a broad range of emission sources. EPA Document Number AP-42, Compilation of Air Pollutant Emission Factors, Environmental protection Agency, Research Triangle Park, North Carolina. Current information on AP-42 is available on the USEPA website. Background Concentration: Concentration already present and due to natural or man-made sources. Calm: No wind velocity. Complex Terrain: Terrain exceeding the height of the stack being modeled. DEM – Digital Elevation Model. Digital files that contain terrain elevations typically at a consistent interval across a standard region of the Earth’s surface. Dispersion Model: A set of mathematical relationships used to estimate (model) the dispersion of pollutants in the atmosphere due to advection and atmospheric/plume turbulence. Emission Factor: An estimate of the rate at which a pollutant is released to the atmosphere per unit of activity. Episode: High increase in pollution levels caused by natural atmospheric conditions. Flagpole Receptor: A receptor located above ground level. Fugitive Dust: Dust discharged to the atmosphere from uncontrolled sources such as unpaved roads, storage piles and heavy construction operations. o GMT: Greenwich Mean Time, the time at the 0 meridian. Inversion Condition: An increase in ambient air temperature with height. ISCST: Industrial Source Complex – Short Term Dispersion Model. Lee side: The lee side of a building is the side that is sheltered from the wind. Monin-Obukhov Length: A constant, characteristic length scale for any particular example of flow. It is negative in unstable conditions (upward heat flux), positive for stable conditions, and approach infinity as the actual lapse rate for ambient air reaches the dry adiabatic lapse rate. MSDS: Material Safety Data Sheet. NWS: National Weather Service. Atmosphere Administration. It is a part of the National Oceanic and Pasquill Stability Categories: An atmospheric stability classification system defined using surface wind speed, solar insolation (daytime) and cloudness (night time). Preferred Model: A refined model that is recommended by a regulatory body for a specific type of regulatory application. Primary Pollutant: A contaminant emitted from the source. Regulatory Model: A dispersion model that has been approved for use by the U.S. EPA, and is listed in the latest edition of Guideline on Air Quality Models. Screening Technique: It is a relatively simple analysis technique to determine the air quality impact of a given source in a short time frame. Concentration estimates from screening techniques are conservative in nature. Simple Terrain: An area where terrain heights are all lower in elevation than the top of the stack of the source. Stagnation: A calm condition lasting more then 36 hours. Upper Air Data (or soundings): Meteorological data obtained from balloonborne instrumentation that provides information on pressure, temperature, humidity and wind away from the surface of the earth. Assists in developing vertical profiles of different meteorological parameter. U.S. EPA: United States Environmental Protection Agency. Vertical Potential Temperature Gradient: The change of potential temperature with height. A positive value indicates a stable atmosphere and means that potential temperature increases with height. Wind Profile Exponent: The value used to specify the profile of wind speed with height according to the power law. Worst Case: The maximum exposure, dose, or risk that can conceivably happen in an area due to an emission source. 3.0 INPUT DATA REQUIREMENTS The source data, meteorological data and site data are essential to run any air quality model. The data collected have to be converted to a form so that it is acceptable by the model to be used. The input data and related procedures constitute an integral part of the modeling. Apart from these data the receptor data and the air quality data are needed to study the impact of a source. A brief discussion is given below on the different classes of the data needed to run AERMOD model. A typical AERMOD interface uses the five pathways to develop an input file. These pathways are Control pathway, Source pathway, Receptor pathway, Meteorological pathway, Terrain Grid pathway, and Output pathway. The Control pathway is used to specify the modeling scenario, and the overall control of the modeling run. Source pathway is used to define the sources of pollutant emissions. Receptor pathway is used to determine the air quality impact at specific locations. Meteorology pathway is used to define the atmospheric conditions of the area being modeled, which will be useful while determining the distribution of air pollution impacts for the area. Terrain Grid pathway is the one where the user has the option of specifying gridded terrain data. Gridded terrain data is used in calculating dry depletion in elevated or complex terrain. In the Output pathway the user defines the type of output results necessary to meet the needs of air quality modeling analyses. Control pathway is a collective term used to specify the overall job control options including titles, dispersion options, terrain options, and pollutant/ average time options. User can specify two lines of title with a maximum of 68 characters. Dispersion option in the software gives the user a choice between the default and non-default options. Default options include the use of stack-tip downwash, and a routine for processing averages when calm winds or missing meteorological data occur. Non-default options can be used for suppressing the use of stack-tip downwash, and to disable the date checking for nonsequential meteorological data files. Source pathway feature enables the handling of multiple sources, including point, volume, and area source types. Several source groups may be specified in a single run, with the source contributions combined for each group. It also has various features like building downwash, urban sources, and hourly emission file. Receptor pathway in the software allows for the flexibility in the specification of receptor locations. The user can specify multiple receptor networks in a single run. Cartesian grid receptor networks and polar grid receptor networks can also be mixed in the same run. These features have wide range of applications especially where the user may need a coarse grid over the whole modeling domain, but a denser grid in the area of maximum expected impacts. In the Meteorology pathway the model uses a file of surface boundary layer parameters and a file of profile variables including wind speed, wind direction, and turbulence parameters. These meteorological inputs are generated by the meteorological preprocessor AERMET described later on in the report. In the Terrain Grid pathway the user may either use the terrain grid input file or may leave the option. In case the option is used, the user is required to specify the location of the terrain grid file in UTM coordinates. Output pathway of this model allows producing the following types of output data: i) summaries of high values by receptor for each averaging period and source group combination, ii) summaries of overall maximum values for each averaging period and source group combination, and iii) concurrent value tables summarized by receptor for each averaging period and source group combination for each day of data processed. 3.1 AERMET and AERMAP The module AERMET [8] uses meteorological data and surface characteristics to calculate boundary layer parameters such as mixing height and friction velocity, needed by AERMOD. Data must be representative of the meteorology in the modeling domain irrespective of whether it is on-site or off-site data. National Weather Service (NWS) hourly surface observations, NWS twice-daily upper air soundings and data from an onsite meteorological measurement program can be processed in AERMET. Hourly surface data is available in SCRAM format (see www.webmet.com), SAMSON format (visit www.webmet.com), CD-144, HUSWO, TD-3505, TD-3280 (Fixed Block) and TD-3280 (Variable Block) format (see www.ncdc.gov). Upper air data is available in TD 6201 AERMOD Format (www.webmet.com), SCRAM format (www.webmet.com), NCDC TD-6201 format, and FSL format (www.ncdc.gov). AERMET processes meteorological data in three stages. Stage 1 extracts hourly surface data and upper air soundings from data files and processes the data through quality assessment checks on variables of interest. Stage 2 processing combines the different sources of data into one file composed of blocks of 24-hour data. The 24-hour blocks begin with hour 1 and end with hour 24. If any input data to this stage of processing are physically missing for the hour, then the appropriate missing value indicator represents the meteorological variables for that hour. In Stage 3, the boundary layer parameters are estimated for use by dispersion models. The input file to Stage 3 is the merged data collected in Stage 2. Stage 3 creates the two output files for AERMOD, the Surface File and the Profile File. The module AERMAP [9] uses gridded terrain data for the modeling area to calculate a representative terrain-influence height associated with each receptor location. AERMAP requires two types of input data files. The first input runstream file that directs the actions of AERMAP through a set of options defines the receptor locations and specifies the input and output file names. The second type of input data needed to run AERMAP is the Digital Elevation Model (DEM) data obtained from the United States Geological Survey (USGS). During setup processing AERMAP checks all of the sources and receptors specified to ensure that they lie within the domain, and therefore, within the area covered by the DEM files. If a receptor is found to lie outside the domain, or if the domain extends beyond the area covered by the DEM data, AERMAP generates a fatal error message, and further processing of the data is aborted. 3.2 COORDINATE SYSTEMS The modeling may be performed using the usual x-y coordinate system or the Universal Transverse Mercator (UTM) system. A typical x-y coordinate system is not based on a geographic standard. For example, a facility may refer its coordinate system based on a local set datum. The main stack may be used as a reference point with coordinates of 0, 0 m. All site measurements (facility buildings and sources) are then related spatially to this origin. However, local coordinates do not give an idea of the location of the facility on a map. Therefore, it is advantageous to consider a geographic coordinate system such as the Universal Transverse Mercator system. UTM system will precisely give the location of the facility. The Universal Transverse Mercator coordinate system uses meters as its basic unit of measurement and is more precise than latitude/longitude in defining a location. Use the same horizontal datum in defining sources, buildings, and receptors. Defining some locations based on a NAD27 (North American datum of 1927) while defining others within a NAD83 (North American datum of 1983) can lead to significant errors in relative locations. 3.3 TERRAIN Terrain elevation is defined as the elevation relative to the facility base elevation. Air quality modeling results are impacted by terrain elevations. The degree of impact depends on type of terrain. Two types of terrain used in AERMOD are discussed below: 1. Simple Terrain: Simple terrain is used where the terrain elevations for the surrounding area are not above the top of the stack being evaluated in the air modeling. The “Simple” terrain can be divided into two categories: i) Simple Flat Terrain is used where terrain elevations are assumed not to exceed stack base elevation. If this option is used, then terrain height is considered to be 0.0 m, and ii) Simple Elevated Terrain is used where terrain elevations exceed stack base but are below stack height. 2. Complex Terrain: In this case, the terrain elevations for the surrounding area, defined as anywhere within 50 km from the stack, are above the top of the stack being evaluated. AERMAP is the digital terrain pre-processor for the AERMOD model. It analyzes and prepares digital terrain data for use by AERMOD. AERMAP requires that the digital terrain data files be in native (non SDTS) USGS 1-degree or 7.5-minute DEM format. Digital elevation terrain data is available for the U.S. from a number of vendors in several different formats. 3.4 SURFACE ROUGHNESS AERMOD allows wind direction dependent surface characteristics to be used in the processing of the meteorological data. The AERMET procedure uses the area-weighted average of the land use with 3 km of the site. Table: Surface Roughness Heights for Land Use Types and Seasons (meters) SEASONS LAND USE TYPE Spring Summer Autumn Winter Water surface 0.0001 0.0001 0.0001 0.0001 Deciduous forest 1.00 1.30 0.80 0.50 Coniferous forest 1.30 1.30 1.30 1.30 Swamp 0.20 0.20 0.20 0.05 Cultivated land 0.03 0.20 0.05 0.01 Grassland 0.05 0.10 0.01 0.001 Urban 1.00 1.00 1.00 1.00 Desert shrub land 0.30 0.30 0.30 0.15 Source: USEPA Publications 4.0 CONCENTRATION CALCULATIONS 4.1 CONCEPT OF PLUME PENETRATION Meteorology plays an important role in the dispersion of effluents. Various meteorological factors affect the dispersion of emission into the atmosphere in a variety of ways. One of the most important meteorological variables responsible for high ground level concentrations is the height of convective boundary layer (or mixing height). The following figure shows different situations of plume mixing in the atmosphere as a result of the development of the thermal boundary layer during a typical day. The figure shows that: a. At 6 AM the plume disperses above the mixing height. This type of situation is termed as injected plume in AERMOD. b. At 7 AM the plume completely penetrates the convective boundary layer and disperses above the mixing height. This type of plume is termed as penetrated plume in AERMOD. c. At 9 AM convective eddies pulls the pollutant to the ground. The spread of the plume is also restricted in vertical due to the mixing height at this time. A portion of the plume is partially penetrated the CBL and reached into the stable layer. 4.2 PLUME RISE Plume rise from a pollutant is an important parameter in equations used to compute ground level concentrations of a pollutant contained in the plume. Both meteorological conditions at the stack and emission characteristics are necessary to obtain a picture of the plume's behavior. However, it is difficult to estimate the extent of the plume rise, because the plume rise models must incorporate the physics of the plume's nature under various ambient conditions. Several attempts have been made to model plume rise through the use of computer programs, but there is little agreement on which models best portray actual conditions. Differences in models mainly exist in the formulae used and the assumptions made. Some models rely on empirical equations obtained using laboratory experiments or field data, while other models are based on theory. The plume rise models may be broadly classified as: Semi empirical equations based on heat flux, Analytical solutions and Numerical models. The rise of the plume is due to buoyancy and/or momentum effects. The rise due to the temperature difference between stack plume and ambient air is accounted by buoyancy term. The vertical momentum of the stack plume due to its exit velocity is calculated using momentum term. For determining plume rise, the buoyancy flux and the momentum flux are calculated as Buoyancy Flux (F): F= g*Vs*d2*(Ts-Ta)/4*Ts Momentum Flux (Fm): Fm = (Ta/Ts) * Vs2 * d2/4 Where, g= acceleration due to gravity Vs= stack exit velocity d=exit gas diameter Ts= stack gas exit temperature Ta=ambient air temperature AERMOD incorporates the plume rise equations for the following cases: 1. Convective boundary layer a. No penetration of the plume b. Complete penetration of the plume c. Partial penetration of the plume 2. Stable boundary layer a. General plume rise equation as a function of downwind distance b. Final rise of stable plume c. Plume rise under near neutral condition d. Plume rise under calm condition In order to perform these calculations, stability parameter N and penetration parameter Ps have been introduced. The figure given below shows the plume rise for calm conditions and crosswind conditions. 4.3 ESTIMATION OF DISPERSION COEFFICIENTS 4.4 CONCENTRATION PREDICTIONS IN CONVECTIVE LAYER 4.5 CONCENTRATION PREDICTIONS IN STABLE LAYER 4.6 BUILDING DOWNWASH The presence of buildings and other structures disturbs downwind wind flow. Such disturbances may have a substantial effect on plume transport and dispersion due to a stack located in the vicinity of a building. Scientists/engineers have used the famous “rule of thumb” that a stack should be at least 2.5 times the height of adjacent buildings for design work. Over the last three decades numerous wind tunnel studies and field studies have been conducted to understand building downwash. The magnitude and direction of the incoming wind field changes as the air moves over an obstruction. On the lee side of the obstruction, the flow separates, leaving a closed circulation (known as cavity) containing lower wind speeds. More turbulence is generated as a result of wind shear. Farther downwind, the air flows downward again. Very high concentrations are possible when a plume gets caught in the cavity. Another possible situation is that the plume disperses in the turbulent wake without being caught in the cavity. This could lead to either higher or lower concentrations than would occur without the building. The magnitude of the concentration depends on whether the reduced height or increased turbulent diffusion has the greater effect. The Plume Rise Model Enhancements (PRIME) model incorporates the following two features associated with the phenomenon of building downwash: 1. Enhanced plume dispersion coefficients due to the turbulent wake, and 2) reduced plume rise caused by a combination of the descending streamlines in the lee of the building and the increased entrainment in the wake. A numerical model is used to compute the plume rise. The PRIME model accounts for the following: 1) The location of the stack relative to the building, 2) The deflection of streamlines up over the building and down the other side, 3) The effects of the wind profile at the plume location for calculating plume rise; 4) Pollutants captured in the recirculation cavity to be transported to the far wake downwind, and 5) Avoids discontinuities in the treatment of different stack heights, which were a problem in the earlier algorithms. AERMOD allows the consideration of downwash effects from multiple buildings. The building downwash analysis is performed using BPIP-PRIME before running AERMOD. The results from BPIPPRIME are then incorporated into the AERMOD run. The U.S. EPA Building Profile Input Program requires the following information to perform building downwash analysis: 1. X and Y location for all stacks and building corners. 2. Height for all stacks and buildings (meters). For building with more than one height or roofline, identify each height (tier). 3. Base elevations for all stacks and buildings. The details on how to input building and stack data to the program are given in the BPIP User’s Guide. The calculations in BPIP model are divided into two parts. 1. Based on the GEP technical support document: This portion is designed to determine whether or not a stack is subject to wake effects from a structure or structures. Values are calculated for GEP stack height and GEP related building heights (BH) and projected building widths (PBW). A list is given for the stacks being affected by which structure wake effects. 2. Calculates building downwash BH and PBW values based on references by Tikvart and Lee. These can be different from those calculated in Part One. The calculations are performed only if a stack is being influenced by structure wake effect. In output BPIP-PRIME has the following additional information: BUILDLEN: Projected length of the building along the flow. XBADJ: Along-flow distance from the stack to the center of the upwind face of the projected building. YBADJ: Across-flow distance from the stack to the center of the upwind face of the projected building. REFERENCES: 1. R. M. Riswadkar and A. Kumar, "Evaluation of the ISC Short Term Model in a Large-Scale Multiple Source Region for Different Stability Classes", Env. Monitoring and Assessment, pp 1-14, 1994. 2. A. Kumar, J. Luo and G. Bennett, "Statistical Evaluation of Lower Flammability Distance (LFD) using Four Hazardous Release Models", Process Safety Progress, 12 (1), pp 1-11, 1993. 3. V.C. Patel and A. Kumar, “Evaluation of Three Air Dispersion Models: ISCST2, ISCLT2, and SCREEN2 for Mercury Emissions in an Urban Area”, Env. Monitoring and Assessment, 53, pp 259-277, 1998. 4. R. J. Paine, R. F. Lee, R.W. Brode, R. B. Wilson, A. J Cimorelli, S.G. Perry, J.C. Weil, A. Venkatram and W.D. Peters, “Model Evaluation Results for AERMOD (12/17/98 Draft)”, Prepared for Environmental Protection Agency, Research Triangle Park, NC, 1998. 5. U. S. Environmental Protection Agency, “Revision to the Guideline on Air quality Models: Adoption of a Preferred Long Range Transport Model and Other Revisions”, 40 CFR Part 51, April 15, 2003. 6. U. S. Environmental Protection Agency, “Availability of Additional Documents Relevant to Anticipated Revisions to the Guideline on Air Quality Models Addressing a preferred General Purpose (Flat and Complex Terrain) Dispersion Model and Other Revisions”, Federal Register, Volume 68, Number 173, pp 52934-52935, September 8, 2003. 7. U. S. Environmental Protection Agency, “User’s Guide for AMS/EPA Regulatory Model – AERMOD”, Office of Air Quality Planning and Standards Emissions, Monitoring, and Analysis Division, pp 1-228, 2002. 8. U. S. Environmental Protection Agency, “User’s Guide for the AERMOD Meteorological Preprocessor (AERMET): Draft”, 1998. 9. U. S. Environmental Protection Agency, “User's Guide for the AERMOD Terrain Preprocessor (AERMAP): Draft”, 1998.