1. Hacar surfaces
advertisement

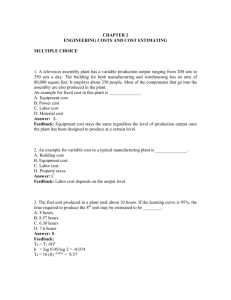
PROCEEDINGS OF SYMPOSIUM ON COMPUTER GEOMETRY SCG ’ 2004, VOLUME 13, pp. xy -xz A NOTE ON A GENERALIZATION OF HACAR SURFACES Jaroslav Černý1, Jana Vecková1 1 FCE CTU, Thákurova 7, 166 29 Praha 6, ČR, e-mail: cerny@mat.fsv.cvut.cz Abstract. In the paper is defined a generalization of a Hacar surface. Several examples will be presented. The basic geometrical properties are studied in the selected types of surfaces. Key words: surface, Hacar surface, collineation 1. Hacar surfaces The concept of a generalization of a hyperbolic paraboloid (HP surface) presented by F. Kadeřávek at the CTU conference in the year 1955, see [1], is well known. The generalization of a HP surface is based on the following idea. The horizontal section of a HP surface in the standard position (the axis of the surface is vertical) is a hyperbola. If we need to be this section a pair of parallel lines, we change the basic definition of a HP surface as a surface of translation: A moving parabola k intersects a pair of suitable parallel lines and has the vertex on the given parabola h. All curves produced by the moving parabola k are lying in parallel planes. As in the case of a HP surface we can change the role of both curves k and h. On the resulting surface can be found two systems of curves. Their properties, mainly the affine correspondence between their projections in the planes of curves directors h and k are known. These properties can be found in the papers 2 - 4. One generalization of these “sphenoid surfaces” is presented in the paper [5]. This paper was not published. There are no examples in the whole paper. 2. One generalization of a Hacar surface Let k(t) be a smooth curve in yz-plane and let h(u) be a smooth curve in xz-plane, called curve directors. Choose an arbitrary plane 0 parallel to yz-plane, its equation is x x0 , where x x0 . We consider an intersection point of the plane 0 and the curve h(u) and we denote it H=h(u0). We translate the plane 0 by the vector (-x0, 0, 0). We denote Hp the image of the point H under this translation. 3 We work in the augmented Euclidean space E with standard homogeneous coordinates. Let us assume a point S 0, m, n,1, where m R , n R , such that S k . We suppose for the points H x0 , k02 , k03 , k04 and H p 0, k 02 , k 03 , k 04 the following conditions: H p S , H p y, H p k . Let K be a point in the intersection k SH p (if there exist more intersection points, we choose one of them). We consider a central collineation in yz-plane given by the centre S, the axis y, and K and H p K as a pair of corresponding points (the point S lies on line X (X) for all non-fixed points X), see Fig. 1. To describe this collineation analytically, we solve the equation H p f K S v K , where f is the linear form of the axis (or generally a fixed hyperplane) and v R is a PROCEEDINGS OF SYMPOSIUM ON COMPUTER GEOMETRY SCG ’ 2004, VOLUME 13, pp. xy -xz constant. In our case is f X x2 . Thus the former equation written in coordinates gives the following system of equations: k02 k 2 t m v k 2 t , k03 k 2 t n v k3 t , k04 k 2 t v k 4 t , where K 0, k2 (t ), k3 (t ), k4 (t ) . We can write the system (1) in the form: k02 k04m vk 2 t m k 4 t . k03 k04m vk3 t n k 4 t (1) (2) Fig. 1. We suppose that the system (2) has at least one solution that means it exists at least one intersection point K. If we have more points we chose one of them. We denote tK the parameter of the point K and according to the system (1) we find a constant v and we denote it vK . We obtain k t k p 0, k 2 t m v K , k 2 t n k 3 t v K , k 2 t k 4 t v K . There are two systems of parametric curves on the surface. The curves in the first system arise by the described procedure. We have obtained their projections in yz-plane and using the translation into the plane α0 by the vector (x0,0,0) we have k p 0 t x0 , k 2 t m vK , k 2 t n k3 t vK , k 2 t k 4 t vK . Changing the parameter x0 , where the set of available values defines the curve h, we obtain the parameterization of a “generalized sphenoid surface”: x ,t x , k2 t m vK , k2 t n k3 t vK , k2 t k4 t vK . PROCEEDINGS OF SYMPOSIUM ON COMPUTER GEOMETRY SCG ’ 2004, VOLUME 13, pp. xy -xz 3. Examples By this way we proceed in suitable choice of curves. We would like to mention several examples of these surfaces. Interesting is their shape and the properties which are similar to a Hacar surface. The simplest example is given by a pair of intersecting straight lines as curve directors. The resulting surface is a HP surface. 3.1. Example 1 Both curve directors k and h are parabolas. The parabola k lies in yz-plane, we denote by V its vertex, the second curve director h lies in the xz-plane with. The following functions are parameterizations of both curves z z k (t ) 0, t , V2 t 2 zV , h(u ) u,0, V2 u 2 zV . xQ yP We choose the centre of collineation at the point S = 0, 0, zS, zS zV. The collineation is set by points H=h(u0), V. Using equations (2) we obtain a parameterization of the surface (we have chosen suitable parameters xQ y P 4, zV 3 , see Fig. 2): t , u u, 25 3u 64 t 25u 2 16t 2 u 2 t 2 400 , 12 . 1600 3t 2 u 2 1600 3t 2 u 2 2 (3) Eliminating the parameters t, u we obtain an implicit equation of the surface x 4 (300 12 y 2 75z ) x 2 (9600 384 y 2 2800 z 400 z 2 ) 76800 3072 y 2 25600 z Fig. 2 It can be proved from the implicit equation that there are two systems of conic sections on the surface. One is given by the collineation. In the plane x = 0, we have a parabola, in PROCEEDINGS OF SYMPOSIUM ON COMPUTER GEOMETRY SCG ’ 2004, VOLUME 13, pp. xy -xz planes x = 4, x = - 4 we have lines, all other sections in planes x x0 are ellipses. The second system of conic sections lies in planes az 3 y 3a 0, a R . 3.2. Example 2 In this example the curve director k be an ellipse in yz-plane, centered at the origin with a, a0, and b, b0 as half-major and half-minor axis, respectively.. The curve k can be b a 2 t 2 . Let us suppose curve h and centre S of parametrized by the function: k(t)= 0, t , a the collineation set as in the previous example. Its parameterization for suitable values is (see Fig. 3): 3u 3u 2 25 t 2 15u 2 320 3u 2 25 t 2 15u 2 320 . 2 2 2 3u 64 t 25 t u 16 u, 5 , 12 2 2 2 2 3u 25 t 15u 320 3u 25 t 2 15u 2 320 t , u u, 5 2 64 t , 12 25 t 2 u 2 16 (4) Fig. 3 The implicit equation of the surface is in the form x 4 (450 18 y 2 225z ) x 2 (14400 576 y 2 3600 z 12000 z 2 ) 115200 4608 y 2 12800 z Similarly as in the first example can be found two systems of conic sections on the surface. First one is a system of curves in planes 0, parallel to yz-plane. The curves in the second system are lying in planes parallel to x-axis and passing through the centre S. PROCEEDINGS OF SYMPOSIUM ON COMPUTER GEOMETRY SCG ’ 2004, VOLUME 13, pp. xy -xz t , u u, 16 3 16 u 2 28 t , 12 16 u 2 12t 2 256 16 u 2 t 2 16 3t 2 16 u 2 12t 2 256 3t 2 3 16 u 2 28 t 16 u 2 t 2 16 u, 16 , 12 3t 2 16 u 2 12t 2 256 3t 2 16 u 2 12t 2 256 (5) The equations (5) show that we change the role of the curve directors we obtain different surfaces. The result can be seen in Fig. 4: Fig. 4 We obtain different surfaces changing the curve directors. The other posibility is to change the collineation, e.g. changing the position of the centre S . We choose the point S at the point 0, yS, zS, zS0, yS0 in the next example. Let be a generalized parabolicalparabolic sphenoid surface. The surface has the same curve directors as generalized parabolical-parabolic sphenoid surface . Despite of the concrete values the equation of the surface is comparatively wide-ranging (see Fig. 6, 7). Fig. 6 3.3. Example 3 In the last example let the curve director k be a sinus curve in yz-plane, k (t ) 0, t , zV cos(t ) , the curve passes through the point V [0, 0, zV ] . Similarly let the curve h be also a sinusoid in xz-plane, h(u ) u,0, zV cos(u ) . It is easy to see that both curves are PROCEEDINGS OF SYMPOSIUM ON COMPUTER GEOMETRY SCG ’ 2004, VOLUME 13, pp. xy -xz passing through the point V. Thus we can create a generalized sinus-sinus surface (see Fig. 7), which is parameterized by the function: t , u 2 cosu 7t cosu cost u, , 10 2 cost 2 cosu 2 cosu cost 7 2 cost 2 cosu 2 cosu cost 7 Fig. 7 The surfaces are too complicated for a practical use. Also the classical Hacar surfaces has no realisation in architectural practice (no realisation is known to the authors). The authors tried to complete the sophisticated work [5] by suitable pictures. The paper has been supported by the project No. MSM 6840770010 References [1] KADEŘÁVEK, F. Vývoj plochy podmíněný praxí, Vědecká konference ČVUT, 1955 [2] HAVEL, V. O plochách klínových I, Časopis pro pěstování matematiky, 1955, vol. 80, pp. 51-59, MÚ ČSAV. [3] HAVEL, V. O plochách klínových II, Časopis pro pěstování matematiky, 1955, vol. 80, pp. 308-316, MÚ ČSAV. [4] HAVEL, V. O projektivním pojetí translačních ploch, Časopis pro pěstování matematiky, 1956, vol. 81, pp. 331-334, MÚ ČSAV. [5] HARANT, F. O kolineačních plochách, 1972, habilitation, unpublished.