Statics7
advertisement

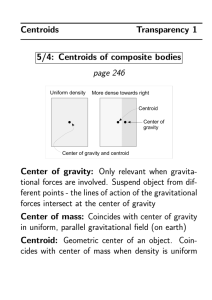
7. CENTROIDS AND CENTERS OF MASS CENTROID - an average position of any set of quantities with which we can associate positions (*) x xi ci i ci y y i ci i ci i i xi, yi - coordinates ci - any quantity associated with position (e.g. area, volume, mass, weight, etc.) 7.1 CENTROIDS OF AREAS In order to determine the centroid (average position of the area), consider an arbitrary area A in the x-y plane, divide the plane area into parts A1, A2, …, AN and denote the positions of the parts by (x1, y1), (x2, y2), …, (xN, yN). The centroid can be obtained using Eqs. (*), but there is a question: What are the exact positions of the areas A1, A2, …, AN ? Some obvious cases: circle, rectangle, areas that are symmetric about one or two axes. To determine the exact location of the centroid of an arbitrary area, we must take the limit as the sizes of the parts approach zero: x x dA A dA A y y dA A dA A x, y - coordinates of the differential element of area dA 7.2 CENTROIDS OF COMPOSITE AREAS Integration process becomes difficult for complicated areas. COMPOSITE AREA x - an area that consists of a combination of simple areas - the centroid can be determined without integration, if the centroids of its parts are known (some of them tabulated in Appendix B). x dA A x dA A x dA A x dA A dA 1 A y 2 n dA dA dA A1 A2 An xi Ai x1 A1 x2 A2 xn An i A1 A2 An Ai i yi Ai i Ai (**) i If the composite area contains some cutouts, the centroid of that area can be determined using the same Eqs. by treating the cutouts as negative areas. Procedure: 1. Choose the parts - divide the area into parts whose centroids are known or can be easily determined 2. Determine the values (the centroid and the area) for the parts 3. Calculate the centroid using the Eqs. (**) 7.3 DISTRIBUTED LOADS - loads continuously distributed along lines - it is described by a function w such that the force exerted on an infinitesimal element dx of the beam is w dx - the dimensions of w are (force)/(length), i.e. [N/m] or [lb/ft] The total force exerted by the distributed load (assuming that the function w is known): F w dx L (integrate the loading curve (graph of w) with respect to x) the total force exerted by the distributed load is equal to the “area” between the loading curve and the x axis The total moment about a point (origin) due to the distributed load: M xw dx L Distributed load can be represented by a single equivalent force F acting at the position x xw dx L w dx L (moments of F and distributed load about the origin, have to be equal) 7.4 CENTROIDS OF VOLUMES AND LINES CENTROIDS OF VOLUMES - considering a volume V and its differential element dV with coordinates x, y and z, by analogy with Eqs. for a centroid of an area, the coordinates of the centroid of V are: x dV xV dV y dV yV V dV z dV z V V dV V If a volume has the form of a plate with uniform thickness and cross-sectional area A, its centroid coincides with the centroid of A and lies at the midpoint between the two faces. CENTROIDS OF LINES x - considering a differential element dL with coordinates x, y and z, the coordinates of the centroid of a line L are: x dL L dL L y y dL L dL L z z dL L dL L The centroids of some simple volumes and lines are tabulated in Appendixes B and C. CENTROIDS OF COMPOSITE VOLUMES AND LINES - the same approach and procedure as for the composite areas x xiVi i Vi y yiVi i Vi x i Li i i Vi i i xi Li z ziVi y yi Li i Li - for a composite volume i z zi Li i Li i - for a composite line i 7.5 THE PAPPUS-GULDINUS THEOREMS - two simple and useful theorems relating surfaces and volumes of revolution to the centroids of the lines and areas that generate them FIRST THEOREM - consider a line L in the x-y plane rotating about the x-axis (the line does not intersect the x-axis and the coordinates of its centroid are x, y ) - the area of the surface of revolution is A 2 y L SECOND THEOREM - consider an area A in the x-y plane rotating about the x-axis (the area does not intersect the x-axis and the coordinates of its centroid are x, y ) - the volume of the volume of revolution is V 2 y A 7.6 DEFINITION OF CENTER OF MASS of an object is the centroid of its mass x dm y dm xm ym dm m dm m z dm zm dm m x, y, z - coordinates of the differential element of mass dm The weight of an object can be represented by a single equivalent force acting at its center of mass. 7.7 CENTERS OF MASS OF OBJECTS The variable of integration is changed from mass to volume by introducing the mass density ; dimensions of are (mass)/(volume), i.e. [kg/m3] or [slug/ft3]. dm dV the mass of a differential element of a volume m dm dV total mass of an object m V m dV V total mass of a homogeneous object (its mass density is uniform) V The weight density is g and can be expressed in [N/m3] or [lb/ft3]. The coordinates of the center of mass (in terms of volume integrals) are: x dV xV dV y dV yV V z dV z V dV dV V V In some particular cases, centers of mass coincide with centroids of volumes, areas and lines the center of mass of a homogeneous object coincides with the centroid of its volume the center of mass of a homogeneous plate of uniform thickness coincides with the centroid of its cross-sectional area the center of mass of a homogeneous slender bar of uniform cross-sectional area coincides approximately with the centroid of the axis of the bar 7.8 CENTERS OF MASS OF COMPOSITE OBJECTS x xi mi i mi y yi mi i mi i x xiWi i Wi i z zi mi i mi i y yiWi i Wi i - center of mass of a composite object i z ziWi i Wi i - center of weights of a composite object