Kinematics equations in 1
advertisement

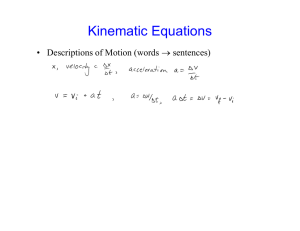
Kinematics equations in 2-D (assume to=0) dr v dt d 2 r dv a dt dt 2 For a constant we get : 1 r ro vo t at 2 2 2 2 vi voi 2ai (ri roi ) v vo a t where i x or y Newton’s Laws of Motion 1st. Objects have inertia. 2nd. F ma , the net force on a body causes acceleration. 3rd. FAB FBA , 3rd law pairs do not act on the same body. Static Friction : f s,m ax s N Kinetic Friction : f k k N Springs : Hooke' s Law F -kx Circular Motion: Centripetal Acceleration : 2 vt r In order to move in a circle needs sum of forces on body to equal : F ma c ac Tangential Acceleration and Velocity : s r ds v t r dt d 2s a t r dt 2 Angular Kinematics Equations o t 2 o 2 ( o ) 2 1 2 o o t t 2 Momentum and Impulse p mv dp Fn et dt Impulse Ft p In collisions with no external force : Fn et 0, p f po