Paper Report
advertisement

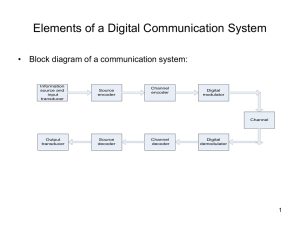
Wireless Information Transmission System Lab. Channel Estimation 2012/08/13 蒲俊瑋 Institute of Communications Engineering National Sun Yat-sen University Outline Introduction Channel Estimation Techniques in OFDM Systems LS Channel Estimation Linear Interpolation Channel Estimation MMSE Channel Estimation MLS Channel Estimation Pilot Arrangement in OFDM Systems and DecisionFeedback Channel Estimation Channel Equalization in Timing Varying Channel 2 Wireless Information Transmission System Lab. Introduction Institute of Communications Engineering National Sun Yat-sen University Small Scale Fading Multi-path channel 4 Channel Impulse Response A mobile radio channel may be modeled as a linear filter with a time varying impulse response, where the time variation is due to receiver motion in space. The filtering nature of the channel is caused by the summation of amplitudes and delays of the multiple arriving waves at any instant of time. 5 Channel Impulse Response In the absence of noise, the received signal can be expressed as y (t ) x(t ) h(t ) x( )h(t )d where h(t ) is the channel impulse resonse. x(t ) is the transmitted signal. y (t ) is the received signal. After sampling, the discrete received signal is given by L 1 y[n] x[k ]h[n k ] k 0 6 The Multi-Path Channel Effect The multi-path channel effect EX: Data = [1 2 3 4] Channel = [1 1] y= 1234 1234 = 13574 1 2 3 4 1 2 3 4 7 path1 path2 The Matrix Form of Channel The wireless stationary channel impulse response is given by h [h 0 , h 1 ,..., h L 1]T , where L is the total number of resolvable paths. We assume that each tap of the channel impulse responses h l , 0 l L 1 , are independently distributed complex Gaussian 2 random variables with zero-mean and variance h l . the magnitude 1 0.5 0 1 2 3 4 5 the lth tap of the channel 8 6 7 8 The Matrix Form of Channel The matrix G is constructed as follows: h 0 0 h 0 h L 1 h 0 G h L 1 h 0 0 0 h L 1 0 1 1 Gx 0 0 EX: Data = [1 2 3 4] Channel = [1 1] 9 0 1 1 0 0 0 h 0 0 0 1 1 0 1 1 0 2 3 0 3 5 1 4 7 The Matrix Form of Channel The matrix G tail is constructed as follows: G tail 0 0 0 h L 1 0 CP 10 h 1 h L 1 0 0 The Matrix Form of Channel Furthermore, a circular convolution matrix G circular can be obtained: G circular =G + G tail h 0 0 h 0 h 1 h L 1 0 h L 1 0 0 h L 1 0 h 0 0 h L 1 11 h 0 h 1 h L 1 0 0 h 0 The Transmitted OFDM Signal After the inverse discrete Fourier transform (IDFT) operation, the ith transmitted OFDM symbol in time domain can be expressed by: xi F H Xi where Xi and F H are an N 1 vector and an N N matrix standing for modulated symbols and an IDFT matrix. 12 The Received CP-OFDM Symbol Assuming the synchronization is perfect and CP is adopted, the received ith OFDM symbol can be expressed as: ri Gxi G tail xi wi G circular xi wi xi N h w i where N denotes the circular convolution and wi denotes the additive white Gaussian noise (AWGN) vector in the time domain 2 with zero mean and variance w . We note that there is no ICI and ISI in each OFDM symbol. 13 The Received CP-OFDM Symbol After DFT operation, the ith received OFDM symbol in the frequency domain can be expressed as: R i Fri F xi N h w i HXi Wi where Wi is the AWGN in the frequency domain and H is a N × N diagonal matrix denoting the channel response in frequency domain. 14 The Received CP-OFDM Symbol Any circular matrix can be diagonalized by DFT matrix: FG circular F H H H 0 0 0 H 1 0 0 H N 1 0 0 The received signal can be expressed as: Ri Fri F G circular xi w i F G circular FXi w i FG circular FXi Fwi HXi Wi 15 Wireless Information Transmission System Lab. Channel Estimation Techniques in OFDM Systems Institute of Communications Engineering National Sun Yat-sen University Introduction In general, channel estimation can be cataloged into three kinds of estimation schemes: 1. Blind 2. Superimposed 3. Pilot-based The first two structures can obtain some bandwidth merit, but the computational complexity is usually not acceptable in practical realization. 17 Introduction The pilot-based estimation can be cataloged into two kinds of approaches: 1. The parameters are deterministic but unknown constant, such as maximum likelihood (ML) estimator and least square (LS) estimator. 2. The parameters are random variables, such as minimum mean square error (MMSE) estimator and maximum a posteriori (MAP) estimator. 18 System architecture 19 System architecture 1 Input to Time Domain xn IDFTX k n 0,1,2,..., N 1 2 4 Guard Interval xN n, n N g , N g 1,...,1 x f n n 0,1,..., N 1 xn, Guard Removal 3 y f x f n hn wn 5 yn y f n n 0,1,...,N 1 6 Output Channel ICI Channel Output to Frequency Domain Y k DFTyn k 0,1,2,..., N 1 AWGN Y k X k H k I k W k k 0,1,..., N 1 20 7 Channel Estimation Estimated Channel Y k X e k k 0,1,...,N 1 H e k System Model Generally, the pilot symbols are multiplexed into an OFDM symbol in frequency domain: Pk , k qT , q 0,1,..., Q 1. Xk Sk , others. In addition, the power allocation of data and pilot symbols are given by: 2 k qT , q 0,1,..., Q 1. Pk Q , 2 Xk S 2 1 , others. k N Q ρ: Total Power β: Power Allocation Factor N: Number of Subcarriers 21 System Model If system is perfectly synchronized, and the CP is added and removed appropriately, there is no ISI and inter-carrier interference (ICI). As a result, the ith received OFDM symbol after DFT can be expressed as: Ri HXi Wi where H is a N N diagonal channel matrix with the kth element standing for the channel frequency response of the kth sub-carrier and W is a complex white Gaussian noise vector with covariance matrix CW W2 I N . 22 The LS Channel Estimator M Define R i1 R i , where Ri denotes the received pilot signal. The channel estimator based on the LS method is given by: Γ 1R 1 1 H LS H Γ W M M where Γ denotes a Q Q diagonal matrix whose diagonal elements are given by q,q Pk , k qT , q 0,1,..., Q 1. 23 Linear and Second Order Interpolation Linear Interpolation H e k H e m L l l H p m 1 H p m H p m L 0l L Second Order Interpolation [1-2] H e k H e mL l c1 H p m 1 c0 H p m c1H p m 1 1 , c1 2 where c0 1 1 , 1 , c1 2 24 l/N Linear Interpolation Estimated Channel (Channel + Noise)’s Upper Bound Real Channel Pilot Subcarrier (Channel + Noise)’s Lower Bound Data Subcarrier Frequency Domain 25 The MMSE Channel Estimator The MMSE channel estimator is given by [3, 4] HMMSE RHH p RH p H p (ΓΓ ) 2 W H 1 1 HLS where R HH p represents the cross-correlation between all the subcarriers and the pilot subcarriers, and RH p H p represents the autocorrelation matrix between the pilot subcarriers. 26 The Low-Rank MMSE Channel Estimator A low-rank MMSE channel estimator is given by [1]: HMMSE UΔL U H HLS where Δ L is a diagonal matrix with entries l l c SNR , l 0,1, 2,..., L 1, l 0, l L,..., N 1, Note that l can be viewed as the attenuation of the lth tap of the channel impulse response: 2 l hl and c can be expressed as [3]: 2 2 c E xk E 1 xk 27 The Realization of MMSE Channel Estimator In practice, the channel power of the lth transform coefficient l can be obtained from the results of the LS channel estimation. First, the estimate of the channel impulse response h can be acquired by taking the IDFT of the channel frequency response obtained from the LS channel estimate: h FH HLS 2 2 2 2 ˆ ˆ ˆ ˆ ˆ ˆ ˆ And then the λ 0 , 1 ,..., L 1 h h0 , h1 ,..., hL 1 is obtained. 28 The Modified LS (MLS) Channel Estimator The modified LS (MLS) channel estimator is given by HMLS FΔLF H HLS where ΔL is a diagonal matrix. The entries l of ΔL are: 1, l 0,1,..., L 1. l 0, l L,..., N 1. The MLS channel estimator can be considered as a low-pass filter, which is also termed as DFT-based scheme. 29 Wireless Information Transmission System Lab. Pilot Arrangement in OFDM Systems [2] and Decision-Feedback Channel Estimation Institute of Communications Engineering National Sun Yat-sen University Introduction The channel estimation can be performed by either inserting pilot tones into all of the subcarriers of OFDM symbols with a specific period (block type) or inserting pilot tones into each OFDM symbol (comb type). Freq. Comb Type Block Type Time 31 LTE Reference Symbol Arrangement LTE pilot symbol arrangement 1 2 32 Band Edge Virtual subcarriers DC Virtual subcarriers f Active Band … … … … Pilot Data 33 Decision-Feedback Channel Estimation When the channel is slow fading, the channel estimation inside the block can be updated using the decision feedback equalizer at each sub-carrier. Decision Directed Channel Estimation (DDCE) is one of the earliest methods studied for OFDM, mainly because of its popularity in legacy systems. In the earlier studies, DDCE was applied mostly in training based systems. 34 Decision-Feedback Channel Estimation The main idea behind DDCE is to use the channel estimation of a previous OFDM symbol for the data detection of the current estimation, and thereafter using the newly detected data for the estimation of the current channel. For fast fading, the comb-type estimation performs much better. 35 Wireless Information Transmission System Lab. OFDM Systems in Time-Variant Multipath Channels Institute of Communications Engineering National Sun Yat-sen University Introduction Orthogonal frequency-division multiplexing (OFDM) is generally known as an effective technique for high bit rate applications such as DAB, DVB and WiMAX, since it can prevent intersymbol interference (ISI) by inserting a guard interval and can mitigate frequency selectivity of a multipath channel using a simple onetap equalizer. 37 Introduction In an OFDM system, although the degree of channel variation over the sampling period becomes smaller as data rates increase, the time variation of a fading channel over an OFDM block period causes a loss of subchannel orthogonality, resulting in an error floor that increases with the Doppler frequency. The performance degradation due to the interchannel interference (ICI) becomes significant as the carrier frequency, block size, and vehicle velocity increase. 38 Block Diagram for An OFDM System The time-domain transmitted signal is given by N 1 xn X me j 2 nm N , 0 n N -1 m0 The time-domain received signal is then given by L 1 yn hn xnl wn l 0 Binary Data Data Symbol Modulator Xm IDFT Data Symbol Demodulator Add CP Channel Hˆ m Binary Data xn Xm Channel Estimator Equalizer 39 Ym wn DFT + yn Remove CP ICI Analysis The frequency-domain received signal is then given by N 1 L 1 Ym X k H l( m k ) e j 2 lk k 0 l 0 N Wm N 1 L 1 L 1 0 j 2 lm N ( m k ) j 2 lk H l e X X H e m k l k m l 0 l 0 m X m m Wm , 0 m N 1 N Wm where Wm denotes the frequency-domain noise and Hl( mk ) represents the FFT of timing-variant channel, i.e., N 1 1 H l( mk ) hn,l e j ( mk ) N N n 0 40 * ICI Analysis In the general case where the multipath channel cannot be regarded as time-invariant during a block period, the received signal can be expressed in vector form as Y = HX + W T T T where Y = Y0 , Y1 ,..., YN 1 , X X 0 , X 1 ,..., X N 1 , W W0 ,W1 ,...,WN 1 and a0,0 a 1,0 H aN 1,0 a0,1 a1,1 aN 1,1 ( mk ) ( m k ) j k a H H e with m,k 0 1 N a0, N 1 a1, N 1 aN 1, N 1 ... H L( m1k ) e j k ( L1) N , 0 m, k N 1 41 Channel Equalization After performing channel equalization, the equalized signal can be expressed as X H1Y X + H 1W where a0,0 a 1,0 H 1 aN 1,0 a0,1 a1,1 aN 1,1 a0, N 1 a1, N 1 aN 1, N 1 1 The inverse operation increases the system computation complexity. 42 Conclusions Assuming that the channel is stationary over the period of an OFDM symbol, the conventional frequency-domain equalizer with one-tap in an OFDM system compensates the frequencyselectivity of a multipath fading channel. The one-tap frequency-domain equalizer cannot eliminate ICI for the case of a time-varying channel. In time-varying channel, the computation complexity of the frequency-domain equalizer is increased. 43 References [1] Sinem Coleri, Mustafa Ergen, Anuj Puri, and Ahmad Bahai, “Channel Estimation Techniques Based on Pilot Arrangement in OFDM Systems,” IEEE transactions on Broadcasting, Vol. 48, No. 3, September 2002. [2] G.-S. Liu and C.-H. Wei, “A new variable fractional sample delay filter with nonlinear interpolation,” IEEE Trans. Circuits and Systems-11: Anulog andDigiral Signal Processing, vol. 39, no. 2, Feb. 1992. [3] O. Edfors, M. Sandell, J.-J. van de Beek, S. K. Wilson, and P. O. Borjesson, “OFDM Channel Estimation by Singular Value Decomposition,” IEEE Transactions on Communications, vol. 46, no. 7, pp. 931-939, Jul. 1998. [4] S. M. Kay, Fundamentals of Statistical Signal Processing: Estimation Theory, New Jersey: Prentice Hall, 1993, pp. 380-382. 44 Appendix A. LMMSE estimator Y XH W 1 Hˆ LMMSE RHY RYY Y RHY E HH H X H RHH X H H RYY E XH W XH W E XHH H X H 2 I N XRHH X H 2 I N 45 Appendix A. LMMSE estimator 1 H H 2 ˆ H LMMSE RHH X XRHH X I N Y RHH X RHH RHH H X X H 1 H 1 1 XR X IN H HH X XR X X X R X X X Y 1 H H 1 HH 2 H 1 1 1 HH 46 1 2 IN X 2 1 H X 1 1 1 1 X X 1 Y 1 Y