Week 1
advertisement

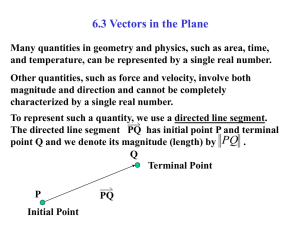
Continuum Mechanics Mathematical Background Syllabus Overview Week 1 – Math Review (Chapter 2). Week 2 – Kinematics (Chapter 3). Week 3 – Stress & Conservation of mass, momenta and energy (Chapter 4 & 5). Week 4 – Constituative Equations & Linearized Elasticity (Chapter 6 & 7). Week 7 – Fluid Mechanics, Heat Transfer & Viscoelasticity (Chapters 8 & 9). Assessment Computer Project – 30% Mid Term (Take Home) – 25% Final (Take Home) – 30% Homework - (15%) Some Examples Continuum mechanics forms the basis of CFD, Solid Mechanics, Thermal Profile Modeling. General Procedure for solving a continuum mechanics problem 1. 2. 3. 4. 5. 6. 7. Decide upon the goal of the problem and desired information; Identify the geometry of the solid to be modeled; Determine the loading applied to the solid; Decide what physics must be included in the model; Choose (and calibrate) a constitutive law that describes the behavior of the material; Choose a method of analysis; Solve the problem. Vectors • • • Vectors are important in continuum mechanics. The direction and magnitude of many variables can be most easily described by vectors. Unit vector – a vector of unit length (often denoted by a caret (pointy hat). Vector addition – add like components (A+B=B+A therefore vector addition is commutative) – ((A+B)+C=A+(B+C) therefore associative) A 2i 3j k ˆe A A 2i 3j 1k A 22 32 12 Vectors 2 • • • • • • Multiplication by a scalar (same as addition – therefore associative and commutative. Scalar (dot product) – multiply like terms and add to give a scalar result. Vector product – most easily found using matrices – vector product is a vector perpendicular to the plane containing the vectors multiplied. (BxA=-AxB). Triple Scalar product (A.BxC) – a scalar that is equal to the area of a parallelepiped defined by the 3 vectors. Triple Vector Product (Ax(BxC)) a vector in the same plane as B and C can be found by: Ax(BxC)=B(A.C)-C(A.B) F d Fd cos F d Fd sin eˆ Matrices • Matrix methods are exceptionally useful for dealing with vectors, (& tensors). • To determine the cross product of two vectors you can evaluate the determinant of a matrix which is made up of the basis and the two vectors. i j k Fd 3 2 3 1 3 4 n det D dij 1 di1 Di1 i 1 i 1 Where i is row number and j column number and the last term on the rhs is the determinant of the n-1 by n-1 matrix when the ith row and first column of D are removed Matrices • Transpose (interchange rows and columns) A T T A ( A B )T A T B T sym m etric AT A skewsym m etric aij a ji 1 4 3 1 3 1 A 3 2 3 AT 4 2 3 1 3 4 3 3 4 Matrices • Multiplication (scalar multiplication of rows by columns) AB C n C cij aik bkj k 1 5 2 8 7 AB C 2 4 1 9 1 36 3 1 2 4 6 36 6 3 5 7 9 3 6 2 1 9 0 57 5 2 49 28 28 7 39 87 18 39 43 59 Inverse Matrices 1 A AdjA det A 1 The Adjoint (also called adjunct) of a matrix is the transpose of the matrix obtained by replacing each element by its cofactor. 2 5 1 cof11 A cof12 A cof13 A 29 22 19 12 7 A 1 4 3 adj( A) cof21 A cof22 A cof23 A 1 cof31 A cof32 A cof33 A 11 16 3 2 3 5 det A 245 3 3 155 1 3 253 14 74 Tensors Properties of anisotropic solids can be represented by tensors. For the most part we will consider rank 1 (vectors) and rank 2 (matrices) tensors. 11 12 13 σ 21 22 23 31 32 33 Matrix methods can be used to solve tensor (i.e. anisotropic continuum mechanics problems). The trace of a tensor is the sum of its diagonal terms. Eigenvalues & Eigenvectors In general a tensor can be considered as an operator that can stretch and rotate space. It is possible to find components that have no rotation. These special components are eigenvalues and eigenvectors. How could this be useful? A.x x A I .x 0 det A I 0 Example 3.4.4 • The state of strain at a point in an elastic body is given by (microstrain). Determine the principal strains and principal directions of the strain. 4 4 0 E 4 0 0 0 0 3 Good review of vector calculus • http://www.enm.bris.ac.uk/admin/courses/ EMa2/EMAT20200_index.html