Z变换
advertisement

Ch7 Representation Signals by Using DiscreteTime Complex Exponentials: The Z-Transform
(用离散时间复指数信号表示信号:Z变换)
Ch7.1 Introduction(引言)
(一)使用Z变换分析信号
•The Z-Transform (Z变换)
•Properties of Z-Transform ( Z变换的性质)
•Inversion of the Z-Transform ( Z反变换)
(二)使用Z变换分析系统
•Solving Differential Equations With Initial Conditions
(系统响应求解)
•The Transfer Function (系统函数)
Ch7.2 the Z-Transform
(Z变换)
•
•
•
•
Definitions (定义)
Regions of Convergence (收敛域)
z plane (z平面)
Zeros and Poles (零极点)
The Z-Transform(Z变换)
双边z变换
X ( z)
x[n]z n
n
z反变换
1
n 1
x[n]
X
(
z
)
z
dz
2πj
离散信号可表示为不同频率复指数ej n的加权叠加,
权重正比于X(z) 。
符号表示:
正变换:X(z)=Z{x[n]}
反变换: x[n] =Z-1{X(z)}
z
x[n]
X ( z)
Regions of Convergence(收敛域)
收敛域: 双边Z变换存在的条件
x[n] r n
n
Regions of Convergence (ROC):使上式成立的所有r值。
Regions of Convergence(收敛域)
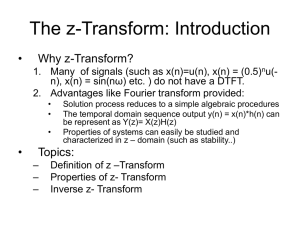
Illustration of a signal that
has a
z-transform, but does not
have a DTFT.
(a) An increasing
exponential signal for which
the DTFT does not exist.
(b) The attenuating factor r–n
associated with the ztransform. (c) The modified
signal x[n]r–n is absolutely
summable, provided that r >
, and thus the z-transform
of x[n] exists.
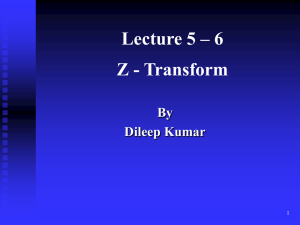
The z-Plane(z 平面)
The z-plane. A point z = rej is located at a distance r– from the
origin and an angle relative to the real axis.
The z-Plane(z 平面)
The unit circle, z = ej, in the z-plane.
Z变换与DTFT变换的关系
1)当收敛域包含单位圆时,Z变换和DTFT均存
在。 X ( e j ) X ( z ) j
z e
2)当收敛域不包含单位圆时,Z变换和DTFT
均不存在。
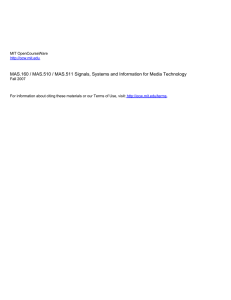
Zeros and Poles(零极点)
Ex7.2: Determing the Z-transform of the signal x[n] = nu[n]
Depict the ROC and the locations of poles and zeros of in
the z-plane.
Solution:
X ( z) a z
n 0
n n
1
1 az1
ROC : z a
Locations of poles and zeros of x[n] = nu[n] in the
z-plane. The ROC is the shaded area.
基本信号的Z变换
[n]
1
ROC : z 0
n
a u[n]
1
1
1 az
ROC : z a
u[n]
1
1 z 1
ROC : z 1
nu[n]
nanu[n]
Z
Z
Z
Z
Z
z
1
1 z
ROC : z 1
1 az
ROC : z a
1 2
z 1
1 2
Ch7.4 properties of Laplace Transform
(Z变换的性质)
z
x[n]
X ( z) with ROC Rx
z
y[n]
Y ( z) with ROC Ry
1. Linearity(线性特性)
Z
ax[n] by[n]
aX ( z) bX ( z) with ROC at least Rx Ry
2. Time Reversal (时域翻转)
1
x[n] X ( )
z
Z
with ROC
1
Rx
3. Time Shift(时移特性)
Z
x[n n0 ]
z n0 X ( z)
with ROC Rx , except possibly z 0 or z
4. Multiplication by a Exponential Sequence
(指数加权性质)
x[n] X ( )
n
Z
z
with ROC Rx
5. Convolution(卷积特性)
x[n]* y[n]
X ( z)Y ( z) with ROC at least Rx Ry
Z
6. Differentiation in the z-domain (z域微分特性)
dX ( z )
nx[n] z
dz
Z
6. Differentiation in the z-domain (z域微分特性)
dX ( z )
nx[n] z
dz
Z
Ex:
1
L[u (t )]
s
d 1 1
L[tu (t )] ( )
2
s
ds s
2
d 1
L[t u (t )] ( 2 ) 3
ds s
s
n!
n!
n t
n
L[t e u(t )]
L[t u(t )] n 1
n 1
(
s
)
s
2
Ch7.5 Inversion of z-transform
(由X(z)求x(n))
bM z M b1 z 1 b0
X ( z)
aN z N a1 z 1 a0
1
c0 c1 z cM N z
当MN时存在
( M N )
B( z )
A( z )
真分式
B( z )
x(n) c0 (n) c1 (n 1) cM N (n (M N )) Z
A
(
z
)
1
if
then
Where,
Ex:
kN
B( z )
k1
k2
1
1
A( z ) 1 r1 z
1 r2 z
1 rN z 1
B( z )
n
n
n
F
(
k
r
k
r
k
r
1 1
2 2
N N )u (n)
A( z)
1
B( z )
ki (1 ri z )
A( z )
5 1
5 z
6
X ( z)
1 1 1 2
1 z z
6
6
1
z 1
1
1
x[n] 4 u[ n] u[n]
2
3
n
n
1
ri
, 求x[n]
Ex: Find the inverse z-transform of
1
H ( z)
1 2 z 1 1 3z 1
Solution:
A
B
H ( z)
1
1 2z
1 3z 1
A (1 2z 1 )H ( z) z 2 2
B (1 3z 1 )H ( z) z 3 3
2
3
H ( z)
1
1 2z
1 3z 1
1)
z 3
2) 2 z 3
3)
z 2
h[n] (2n1 3n1 )u[n]
n1
n1
h[n] 2 u[n] 3 u[n 1]
n1
n1
h[n] 2 u[n 1] 3 u[n 1]
Ch7.6 The Transfer Function(系统函数)
x[n]
X(z)
h[n]
H(z)
yzs[n]=x[n]*h[n]
Yzs(z)=X(z)H(z)
系统函数:系统在零状态条件下,输出的拉氏变换式
与输入的拉式变换式之比,记为H(z)。
Z [ y zs ( z )] Yzs ( z )
H ( z)
Z [ x( z )]
X ( z)
The Transfer function and Difference Equation
(系统函数与差分方程)
Ex: Find the transfer function of the LTI system descriped
by the difference equation
y[n] + 0.7 y[n-1] +0.1 y[n-2] = 2 x[n] + x[n-1]
Solution:
1
2
1
[1 0.7 z 0.1z ]Y ( z) (2 z ) X ( z)
Y ( z)
2 z 1
H ( z)
X ( z) 1 0.7 z 1 0.1z 2
Causality and Stability(因果性与稳定性)
The relationship between the location of a pole and the impulse response
characteristics for a causal system. (a) A pole inside the unit circle contributes
an exponentially decaying term to the impulse response. (b) A pole outside the
unit circle contributes an exponentially increasing term to the impulse response.
Causality and Stability(因果性与稳定性)
A system that is both stable and causal must have all its poles inside
the unit circle in the z-plane, as illustrated here.
Causality and Stability(因果性与稳定性)
离散时间LTI系统BIBO稳定的充分必要条件是
h[n]
n
因果系统在s域有界输入有界输出(BIBO)的充要
条件是系统函数H(z)的全部极点位于 z平面单位圆内。
Ex: A causal system has the transfer function
1
2 z
H ( z)
1 0.7 z 1 0.1z 2
Find the impulse response. Is the system stable?
Solution :
极点z= 0.5,在 z平面单位圆内;
极点z=0. 2, 在z平面单位圆内。
The system is stable(稳定)。
Ch7.10 The Unilateral z-Transform (单边Z变换)
1. Definition:
单边z变换
X ( z ) x[n]z n
n 0
符号表示:
x[k ] X ( z)
zu
Ch7.10.1 Properties of Unilateral z-Transform
(单边Z变换的性质)
Time Shift(时移特性)
x[n] X ( z)
zu
zu
x[n 1]
x[1] X ( z) z 1
1
x[n 2] x[2] x[1]z X ( z) z
zu
2
1
x[n k ] x[k ] x[k 1]z
zu
x[1]z k 1 x[1]z 1 X ( z ) z k
Ch7.10.2 Solving Difference Equations with
Initial Conditions(利用Z变换分析系统响应)
解差分方程
时域差分方程
时域响应y[k]
z
z
反
变
换
变
换
z域代数方程
z域响应Y(z)
解代数方程
Solving Difference Equations with Initial
Conditions(利用Z变换分析系统响应)
y[n] a1 y[n 1] a2 y[n 2] b0 x[n] b1 x[n 1] n 0
已知初始状态为y[-1], y[-2],求y[n]。
求解步骤:
1) 经Z变换将时域差分方程变换为Z域代数方程
2) 求解z域代数方程,求出Yzi(z), Yzs(z)
3) Z反变换,求出响应的时域表示式
Solving Diffrential Equations with Initial
Conditions(利用拉普拉斯变换分析系统响应)
Y ( z ) a1 z 1Y ( z ) a1 y[1] a2 z 2Y ( z ) a2 y[2] a2 y[1]z 1
b0 X ( z ) b1 z 1 X ( z )
b0 b1 z 1
a1 y[1] a2 y[2] a2 y[1]z 1
Y ( z)
X ( z)
1
2
1
2
1 a1 z a2 z
1 a1 z a2 z
Yzi(z)
Yzs(z)
y[n] yzs [n] yzi [n] Z 1 Yzi ( z) Yzs ( z)
Ex: Use the z-transform to determine the output of a system
y[n] 0.7 y[n 1] 0.1y[n 2] 7 x[n] 2 x[n 1] n 0
in response to input x[n] = u[n] . The initial conditions
are y[-1]=-26, y[-2]=-202.
Solution:Taking the unilateral z-transform of both sides of
the difference equation(对差分方程取z变换可得)
Y ( z ) 0.7 z 1Y ( z ) y[1] 0.1 z 2Y ( z ) y[2] y[1]z 1
7 X ( z ) 2 z 1 X ( z )
(0.7 0.1z 1 ) y[1] 0.1y[2]
7 2 z 1
Y ( z)
X ( z)
1
2
1
2
1 0.7 z 0.1z
1 0.7 z 0.1z
2 2.6 z 1
7 2 z 1
Y ( z)
1
1
(1 0.2 z )(1 0.5z ) (1 0.2 z 1 )(1 0.5z 1 )(1 z 1 )
Yzi(z)
Yzs(z)
Ex: Use the z-transform to determine the output of a system
y[n] 0.7 y[n 1] 0.1y[n 2] 7 x[n] 2 x[n 1] n 0
in response to input x[n] = u[n] . The initial conditions
are y[-1]=-26, y[-2]=-202.
0.5
5
12.5
7 2 z 1
Yzs ( z )
1
1
1
1
1
1
1
0
.
2
z
1
0
.
5
z
1
z
(1 0.2 z )(1 0.5z )(1 z )
yzs [k ] Z 1{Yzs ( z)} [0.5(0.2)n 5(0.5)n 12.5]u[n]
10
12
2 2.6 z 1
Yzi ( z )
1
1
1
1
1
0
.
2
z
1
0
.
5
z
(1 0.2 z )(1 0.5 z )
yzs [k ] Z 1{Yzi ( z)} [10(0.2)n 12(0.5)n ]u[n]
y[n] yzs [n] yzi [n]