beta-skeletons
advertisement

Open problems for -skeletons in
R2 and R3.
Miroslaw Kowaluk
University of Warsaw
EuroGIGA meeting, Lugano 2011
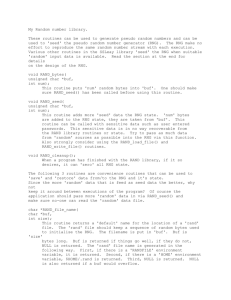
For a given set P containing n points in Rm and the parameter we define
-skeleton as a graph (P , E), in which xy E iff any point from P\{x,y}
doesn’t belong to an area R(x,y,), where
1. For = 0, R(x,y,) is the segment xy .
x
2. For 0 < < 1, R(x,y,) is the intersection of
two spheres with the radius d(x,y)/2, which
boundaries contain the both points x i y.
= 0,8
y
3. For 1 < , R(x,y, ) is a intersection of two spheres with radius
d(x,y)/2 and centered in points (1-/2)x+(/2)y and (/2)x+(1-/2)y resp.
4. For = , R(x,y,) is an unbounded strip between two lines containing x
and y resp. And perpendicular to the segment xy.
=1
=2
=
x
y
lune-based
definition
sphere-based definition
3. For 1 < , R(x,y,) is the union of
two spheres, whose boundaries contain
the both points x i y.
x
4. For = , R(x,y,) is the whole plane .
= 1,25
y
Properties of -skeletons.
The -skeleton for a set of points P and = 1 is called Gabriel Graph
(GG(P)) (Gabriel,Sokal 69), and for = 2 is called Relative Neighbourhood
Graph (RNG(P)) (Toussaint 80).
Theorem (Kirkpatrick,Radke 85).
MST(P) RNG(P) GG(P) DT(P)
z
z
x
y
y
x
w
Theorem.
For 0 < 1 the –skeleton can have (n2) edges.
Theorem (Hurtado, Liotta, Meijer, 2003)
For 0 < 1 the –skeleton can be computed in the optimal time O(n2).
Theorem (Jaromczyk, Kowaluk, Yao)
For 1 2 the –skeleton in R2 in Lp (for 1 < p < ) can be computed
from DT(P) in linear time .
Open problem.
Is there algorithm computing –skeleton for 2 <
that requires o(n2) time ?
The –spectrum defines for each pair of points in P the maximum
value of for which area R(x,y,) is empty.
Theorem (Hurtado, Liotta, Meijer, 2003)
The –spectrum for all pairs of points in P can be found in time
O(n2).
Open problem.
Is there an algorithm finding –spectrum only for edges
which belong to Delaunay triangulation of the given set of
points P that requires o(n2) time ?
Let L(u,v) be a length of the shortest path between vertices u and v in a
connected graph G in R2, and D(u,v) be a distance between u i v.
Spanning ratio S of the graph G is defined as follows
S = max (u,v) G L(u,v)/D(u,v) .
L(u,v)
u
D(u,v)
v
Theorem (Keil,Gutwin 92).
Spanning ratio of the DT(P), where |P| = n, is O(1).
Theorem (Bose,Devroye,Evans,Kirkpatrick 02).
Spanning ratio of the RNG(P), where |P| = n, is (n).
Spanning ratio GG(P), where |P| = n, is (n1/2).
Open problem.
Find a better estimation of the spanning ratio for the –
skeleton where 1 2.
Theorem (Chazelle,Edelsbrunner,Guibas,Hershberger,Seidel,Sharir 90).
GG(P) in R3 can have (n2) edges.
Theorem (Agarwal, Matoušek 92).
RNG(P) in R3 in general position of points in Lp (for 1 < p < ) has O(n4/3)
edges and can be found in expected time O(n3/2+).
Open problem.
What is the graph complexity for the –skeleton in R3 where
12?
Thank you for your attention