Drive Trains Part 2
advertisement

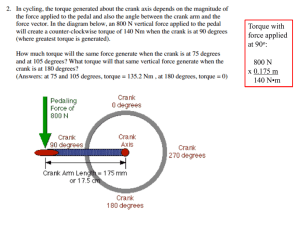
FRC Robot Mechanical Principles Continuing Subjects: • Review understanding from last week – Robot agility and maneuverability? – Chassis types & options – Speed and Torque? • Torque vs. Speed – – – – – Gear ratios Breakaway torque limit 2 speed 3 CIM vs. 2 CIM 3 CIM + 2 Speed – vs. 3 CIM single speed • Wheels: Friction FRC Engineering/Design Review: • Every year our Strategic Design has called for: – “Fast, Stable, Maneuverable With Good, Pushing Power” – How do you get maneuverable – agile – quick turning? – How do you get stable? – How do you get both? 1 – How do you get Fast? – How do you get good pushing power? – How do you get both? 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 23.5" wide x 10" long 2.35:1 23.5wide x 10 length 23.5 wide x 16" (6wd) = 2.35 1.46875 An example of an 8WD agile & stable tank drive layout • Chassis & Drive train layout defined by middle of week 1? Friction Classical Friction Theory • Torque at wheel imparts a “Drive force” at wheel carpet contact point • This is reacted by a “Friction Force” of up to the “Friction coefficient” times the weight on the wheel – The friction coefficient is a characteristic of the materials involved – If the Drive force is greater than the Friction force, the wheels will slip • The maximum Torque that can be transmitted by the drivetrain is the “Breakaway Torque” that creates a Drive force equal the Weight = Friction coefficient x Weight on wheel mass*gravity = =m*m*g m*g Friction reaction force =m*m*g Torque Drive Force = Torque/radius Drive Motors, Transmissions, Sprockets and Wheel Diameter • How to translate speed of motor to speed of robot? – Motor speed inputs into transmission with a gear ratio • Motor load results in speed loss – Transmission output to sprockets connected by chain • Ratio of sprocket teeth decreases speed • Overall Ratio includes motors, transmissions, sprockets/belts, wheel diameter Drive Motors, Transmissions, Sprockets and Wheel Diameter • Simple Transmission Gearbox (as in the CIMple Gear box) – 2 CIM motor input Output Speed = 5300 * 14/65 = 1150 RPM 5300 RPM CIM Motor Free Speed 65 teeth 14 teeth 14 teeth 5300 RPM CIM Motor Free Speed Basic Relationships - Review Wheel / Transmission Mechanics • Torque = Radius x Force = T (in-lbs) • Rotational speed = w • Velocity = v = (w*2*P*r)/(60 *12) • Frictional Coefficient = • Maximum Traction Force = FT = m x W (weight of the robot = mg) • (rpm) m (ft/sec) “empirical” – test wheel grip to carpet, with weight Maximum Torque at wheel that can be transferred by friction – Tm= m * W * radius • Max torque delivered by motor is at stall • Torque decreases with speed T Fw r v W Ft w Drive Motors, Transmissions, Sprockets and Wheel Diameter Drive Motor RPM - no Load Transmission gear ratio Tranmission output speed Sprocket 1 number teeth Sprocket 2 number teeth Sprocket ratio Wheel Speed (no load) Wheel Diameter Linear speed (no load) Motor Load speed loss coef Linear speed (loaded) w (RPM) Velocity = v = (w*2*P*r)/(60 *12) (ft/sec) 5300 RPM CIM motor 4.65 :1 CIMple gearbox 1139.8 RPM 12 s1 24 s2 2.00 :1 s2 / s1 569.9 RPM 4 inches 9.95 feet per seconds 0.81 acquired by measurement of loaded robot 8.06 feet per seconds COTS Drive Transmission Options Drive Transmissions - CIM motor inputs Name CIMple Toughbox Toughbox mini Supershifter Ball Shifter Single Speed Dual Speed Single Speed Vendor Gear Ratio # CIMs AM 4.65 2 AM 12.75 2 AM 10.71 2 AM 6 & 24 2 other ratios available VexPro 3.66 & 8.33 2 other ratios available Vexpro 7 or 6 or 5.33 3 WCP 15 & 5.6 2 other ratios available WCP various 2 Drive Motors, Transmissions, Sprockets and Wheel Diameter 1-Speed Drivetrain Free Speed Stall Torque (RPM) (N*m) CIM 5310 # Gearboxes # Motors per in Drivetrain Gearbox 2 3 2.43 Stall Current (Amp) 133 Free Current (Amp) 2.7 Total Weight (lbs) Weight on Driven Wheels 140 100% Max (Stall) Acceleration in/s 2 81% 90% 1068.39 1104 Max Max wheel acceleration torque Wheel Dia. (in) Wheel Coeff (breakaway) (breakaway) in lbs. in / s 2 4 1.3 364 502.32 Speed Loss Constant Drivetrain Efficiency Motor Stall Torque (in lbs) 21.5055 T = W*mu*R W = mg = T/(mu*R) Wheel Torque = Motor torque*Gear ratio F = ma F= T/R Driving Gear Driven Gear 1 1 1 1 6 1.00 1 1 Wheel Max Max cont. Pushing Match Max (Stall) continuous acceleration Current per Torque (40 Amp) 2 Motor in / s (in-lbs) wheel torque 15.45 ft/s 12.51 ft/s 70.76 Amps 603.92 774.20 437.63 6.00 : 1 <-- Overall Gear Ratio 1.55 Breakaway Amp 33.27 1.202267179 Drivetrain Free-Speed Drivetrain Adjusted Speed a = T/(R*m) m=W/g g=386.4 in/s m=T/(mu*R*g) a= mu*g • Spreadsheet simulations allow quick iterations to explore different combinations of gearboxes, sprockets and wheel diameters. 2 Gear Ratio Effects Gear Ratio Optimization Trades Off Speed and Torque 2CIMS in each of 2 single speed gearboxes • Higher gear ratio – Lower max speed – More low end torque – May not be able to use all of Torque? • Lower Gear Ratio – Higher max speed – Less max torque – May not ever get to top speed? • Torque provides acceleration – T=F*r =m*a *r – increasing speed m = 1.3 Gear Ratio Max Speed m = 1.1 5.03 : 1 14.9 ft/s 7.30 : 1 10.3 ft/s 11.42 : 1 6.6 ft/s m = 0.9 Torque=> • Torque decreases with speed • Wheel friction limits amount of Torque that can be transmitted without spinning wheels <= Speed <= Distance – Only get advantage of higher gear ratio if friction is high – For Instance: m = 0.9 there is no advantage to a gear ratio above 7.3 • For typical m = 1.1 What is optimum gear ratio? Time (seconds) Gear Ratio Effects 2 Speed Gearbox Allows Optimization of Speed and Torque 2CIMS in each of 2 two speed gearboxes • Desire to “shift” when acceleration (or Torque) crosses m = 1.3 – Here shift from 11.43 ratio to 5.03 ratio at about 25 in-lbs and 16 fps – Very slight advantage in distance / time m = 1.1 Gear Ratio Max Speed 5.03 : 1 14.9 ft/s 7.30 : 1 10.3 ft/s 11.42 : 1 6.6 ft/s m = 0.9 • If m = 1.1 then get up to 320 in-lbs torque at low speed • And up to 15 fps! Torque=> <= Speed • Only is advantage if shifted at right times • Driver shifting is difficult – Automation opportunity? – Read speed on encoder and shift automatically? <= Distance Time (seconds) 2 CIM vs 3 CIM Drive 3 CIM / Gearbox Drive Eliminates Need For 2 Speed Gearbox • 3 CIMs provide 50% more torque at any gear ratio • Minimal benefit for 2 speed gearbox – Friction becomes more important than gear ratio • Can have ~14 fps robot (very fast) and have max transmittable torque • 3 CIMs provide quicker acceleration – getting more distance vs. time. – Equal to 2 CIM – 2 speed 3 CIMS in each of 2 single speed gearboxes m = 1.3 m = 1.1 Gear Ratio Max Speed 5.03 : 1 14.93 : 1 7.30 : 1 10.28 : 1 11.42 : 1 6.58 : 1 m = 0.9 Torque=> <= Speed <= Distance 2 CIM vs 3 CIM Drive When May 3 CIM – 2 Speed Make Sense? • Low gear ratio – high speed – High gear ratio set at level of max useful torque benefit • and not trip breakers • Here for m = 1.2, Ratio~ 9:1 – Low gear maintains high acceleration – Makes difference only if accelerating over 15 feet distance • At 20 feet may get up to 3-5 foot advantage • May not be controllable m = 1.3 m = 1.1 Gear Ratio Max Speed 3.44 : 1 21.8 ft/s 5.33 : 1 14.1 ft/s 9.50 : 1 7.9 ft/s m = 0.9 Torque=> <= Speed <= Distance Drive Simulation Allows Convenient Evaluation Of Different Drive Train Configurations • Useful to understand trends – But make sure to anchor to test data • Includes considerations for: – Speed loss coefficient – how much slower motor is under load • Free speed is 5300 RPM, loaded speed ~ 4300 RPM (81%) • May be dependent on gear ratio – further test data needed – Torque accelerates speed, but torque reduces with speed – Speed desired called by voltage – Voltage drops when load is first applied, current spike • Simulation – Iterative time step solution - excel – Test data can be taken to improve simulations – Spreadsheets from team 33 and 148 (JVN) used and here-bye credited • Modified both in calculations and display.