mp_ch7
advertisement

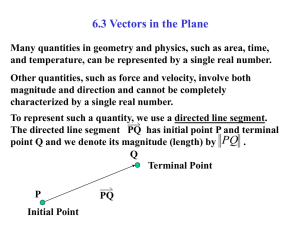
Chapter 7 Vector algebra 7.1 Scalars and vectors Scalar: a quantity specified by its magnitude, for example: temperature, time, mass, and density Vector: a quantity specified by a magnitude and a direction, for example: force, momentum, and electric field Vector a Chapter 7 Vector algebra 7.2 Addition and subtraction of vectors a C ommutativ e: a b b a Associativ e: a (b c ) (a b ) c b ab a b a ( b ) ab a b b ba ab a b Chapter 7 Vector algebra 7.3 Multiplication by a scalar ( )a ( a ) (a ) (a b ) a b ( )a a a x a a Ex: A point P divides a line segment AB in the ratio λ: μ. If the position vectors of the point A and B are a and b respectively, find the position vector of the point P. OP a AP a a (b a ) AB (1 )a b a b B P b p A a O Chapter 7 Vector algebra Ex: The vertices of triangle ABC have position vector a, b and c relative to some origin O. Find the position vector of the centroid G of the triangle. 1 1 1 1 OD d a b , OE e a c 2 2 2 2 th eposi ti onve ctorof a ge n e ralpoi n ton th e l i n eC D th atdi vi de sth e l i n ei n th erati o : (1 - ) E 1 rCD (1 )c d (1 )c (a b ) 2 e th epoi n tve ctoron l i n eBE i s A 1 G rBE (1 )b e (1 )b (a c ) 2 for poi n tG : rCD rBE 1 1 c (1 )c (a b ) (1 )b (a c ) a D 2 2 d 1 1 2 , 1 , 1 b 2 2 3 OG g (a b c ) / 3 C F B Chapter 7 Vector algebra 7.4 7.4Basis Basisvectors vector and and components components a a1e1 a2e2 a3e3 * thre eve ctorse1 , e2 , ande3 forma basis * a1 , a2 anda3 are thecompone ntsof the ve ctora with re spe ctto thebasis A basis set must (1) have as many basis vectors as the number of dimension (2) be such that the basis vectors are linearly independent c1e1 c2e2 ......... c N e N 0 exceptc1 c2 ... c N 0 In Cartesian coordinate system ( x, y, z ) a a x iˆ a y ˆj a z kˆ (a x , a y , a z ) a b (a x bx )iˆ (a y b y ) ˆj (a z bz )kˆ Chapter 7 Vector algebra 7.5 Magnitude of a vector a | a | a x2 a 2y a z2 is themagnitudeof ve ctora unitve ctoraˆ a / | a | 7.6 Multiplication of vectors (1) scalar product a b (2) vector product a b (1) Scalar product: a b abcos 0 b cos is theproje ctionof b ontothedire ctionof a The Cartesisn basis vectors ˆ ˆ i , j andkˆ are mutually orthogonal iˆ iˆ ˆj ˆj kˆ kˆ 1 iˆ ˆj ˆj kˆ kˆ iˆ 0 Ex: work: W F r potential energy: E m B b O b cos a Chapter 7 Vector algebra Commutative and distributive: ab b a a (b c ) a b a c In terms of the components, the scalar product is given by a b (a iˆ a ˆj a kˆ ) (b iˆ b ˆj b kˆ ) x y z x y z a x bx a y b y a z bz Ex: Find the angle between the vector a iˆ 2 ˆj 3kˆ and b 2iˆ 3 ˆj 4kˆ ab cos a b 1 2 2 3 3 4 20 ab a 12 2 2 3 2 14 b 2 2 3 2 4 2 29 20 cos 0.9926 0.12 rad 14 29 Chapter 7 Vector algebra direction cosines of vector a a iˆ a x cos x a a a ˆj a y cos y a a a kˆ a z cos z a a scalar product for vectors with complex components a b a *x bx a *y b y a *z bz * a b (b a ) * (a ) b a b a (b ) a b a | a | a a Chapter 7 Vector algebra (1) Vector product: a b magnitudeis | a || b | sin ab dire ctionpe rpe ndicu lar to both a andb b Properties: (a b ) c a c b c b a (a b ) (a b ) c a (b c ) aa 0 a b 0 a is paralle or l an tiparall e l to b F Ex: The moment or torque about O is r F and| || r || F | sin O r a Chapter 7 Vector algebra Ex: If a solid body rotates about some axis, the velocity of any point in the body with position vector r is v r . For the basis vector in Cartesian coordinate: iˆ iˆ ˆj ˆj kˆ kˆ 0 iˆ ˆj ˆj iˆ kˆ ˆj kˆ kˆ ˆj iˆ kˆ iˆ iˆ kˆ ˆj a b (a y bz a z b y )iˆ (a z bx a x bz ) ˆj (a x b y a y bx )kˆ iˆ ˆj kˆ ax ay az bx by bz Chapter 7 Vector algebra Ex: a iˆ 2 ˆj 3kˆ , b 4iˆ 5 ˆj 6kˆ find a b and the area of parallelogram. iˆ ˆj kˆ b a b 1 2 3 3iˆ 6 ˆj 3kˆ a 1 2 | a || b | sin | a b | 2 4 5 6 A | a b | ( 3) 2 6 2 ( 3) 2 54 Scalar triple product a (b c ) [a, b, c] v a b v ab si n v c vc cos c cos OP (a b ) c v c (ab si n )(c ) cos | b | sin v vol u m eof a paral l e l eippe d O a (b c ) 0 a , b andc are coplanar c b a Chapter 7 Vector algebra a x a y az c x c y cz bx b y bz a (b c ) bx b y bz a x a y a z c x c y c z c x c y cz bx b y bz a x a y a z c (a b ) b (c a ) a (c b ) c (b a ) b (a c ) Useful formulas: (1) (a b ) (c d ) (a c )(b d ) (a d )(b c ) Lagran ges' i de n ti ty (2) a (b c ) (a c )b (a b )c (3) a (b c ) b (c a ) c (a b ) 0 Some basic operations: (1) Kron e ck e rde lta: ij 1 if i j 0 if i j (2) Le vi - C ivitasym bol: εijk 1 e ve npe rm u tatio n ijk mnk im jn in jm k 1 odd pe rm u tatio n 0 an y two of i , j , an d k are e qu al Chapter 7 Vector algebra a b ai b j ij a i bi i j for 3D i j k 1,2,3 i (a b ) k a i b j ijk i j Ex: Show that a (b c ) (a c )b (a b )c Proof: [a (b c )]k a i (b c ) j ijk a i bm cn mnj ijk i j i j m n a i bm cn ( mnj ikj ) a i bm cn [ mi nk mk ni ] i , j m ,n i m ,n a i bi ck a i bk ci ( a i ci )bk ( a i bi )ck i i [(a c )b (a b )c ]k i i Chapter 7 Vector algebra 7.7 Equations of lines, planes and sphere Equation of a line: A line passing through the fixed point A with position vector a and having a direction b , the position vector r of a general point R on the line is r a b (r a ) b (r a ) b b b 0 Lineequation: (r a ) b 0 b R A r a O Chapter 7 Vector algebra nˆ Equation of a plane: A : fi xe dpoi n ton a pl an e ,re pre se n te d by a ve ctora R : ge n e ralpoi n ton a pl an e ,re pre se n te d by a ve ctorr nˆ : th eu n i tn orm alve ctorof a pl an e ( r a ) nˆ 0 r nˆ a nˆ d r xiˆ yˆj zkˆ an d nˆ liˆ mˆj nkˆ lx my nz d R A a d r O pl an ee qu ati on The equation of a plane containing points A, B and C with position vectors a, b, andc r a (b a ) (c a ) r a b c ( nˆ r ) ( nˆ a ) ( nˆ b ) ( nˆ c ) d nˆ r ( nˆ a ) ( nˆ b ) ( nˆ c ) d d d d 1 ba B ca A a b O c C Chapter 7 Vector algebra Ex: Find the direction of the line of intersection of the two planes x+3y-z=5 and 2x-y+4z=3. Normal vector of the planes are n1 iˆ 3 ˆj kˆ n2 2iˆ ˆj 4kˆ The direction vector of line is along the direction of iˆ ˆj kˆ n1 n2 1 3 1 10iˆ 6 ˆj 8kˆ 2 1 4 r c r Equation of a sphere with radius a: | r c |2 (r c ) (r c ) a 2 c O a Chapter 7 Vector algebra Ex: Find the radius of the circle that is the intersection of the plane nˆ r p and the sphere of radius a centered on the point with position vector c . Th e sph e ree qu ation: | r c |2 a 2 2 Th e in te rse cti n g circlee qu ation: | r b | 2 c : th epositionve ctorof th ece n e trof a sph e re nˆ b : th epositionve ctorof th ece n te rof th ecircle r : a positionve ctroon th e in te rse cti n g circle plane (b c ) || nˆ b c nˆ b 2 | b c |2 a 2 2 a 2 2 c 2 2 b c nˆ c a nˆ r 2 2 | r b | ( r b ) ( r b ) r 2r b b 2 r 2 - 2r (c a 2 2 nˆ ) c 2 2(c nˆ ) a 2 2 a 2 2 2 O for | r c |2 r 2 2r c c 2 a 2 an d nˆ r p p - (c nˆ ) a 2 2 a 2 ( p c nˆ ) 2 Chapter 7 Vector algebra 7.8 Using vectors to find distances P pa The minimum distance from a point to a line d | p a | sin | ( p a ) bˆ | A a p b O Ex: Find the minimum distance from the point P with coordinate (1,2,1) to the line r a b , where a iˆ ˆj kˆ , b 2iˆ ˆj 3kˆ b 1 bˆ ( 2iˆ ˆj 3kˆ ), p iˆ 2 ˆj kˆ b 14 1 1 ( p a ) bˆ ˆj [2iˆ ˆj 3kˆ ] [2kˆ 3iˆ ] 14 14 d 1 2 13 (2 32 ) 14 14 d Chapter 7 Vector algebra P The minimum distance from a point to a plane d (a p) nˆ * The signof d de pe ndson whichsideof the planeP is situate d. d nˆ p O pa a Ex: Find the distance from the point P with coordinate (1,2,3) to the plane that contains the point A, B and C having coordinates (0,1,0), (2,3,1) and (5,7,2). b a 2iˆ 2 ˆj kˆ , c a 5iˆ 6 ˆj 2kˆ n (b a ) (c a ) 2iˆ ˆj 2kˆ nˆ n / | n | ( 2iˆ ˆj 2kˆ ) / 3 d (a p) nˆ ( iˆ ˆj 3kˆ ) ( 2iˆ ˆj 2kˆ ) / 3 5 / 3 for P(0,0,0),d 1 / 3 P(1,2,3)i s on th eoppositesideof th eplan efrom th eorigin Chapter 7 Vector algebra b The minimum distance from a line to a line ab nˆ d | ( p q ) nˆ | | ab | Q q q p P p Ex: A line is inclined at equal angles to the x-, y- and z-axis and pass through the origin. Another line passes through the points (1,2,4) and (0,0,1). Find the minimum distance between the two lines. r1 0 ( iˆ ˆj kˆ ), r2 kˆ ( iˆ 2 ˆj 3kˆ ) n ( iˆ ˆj kˆ ) ( iˆ 2 ˆj 3kˆ ) iˆ 2 ˆj kˆ nˆ ( iˆ 2 ˆj kˆ ) / 6 p q kˆ d | kˆ ( iˆ 2 ˆj kˆ ) / 6 | 1 / 6 nˆ a Chapter 7 Vector algebra The distance from a line to a plane r a b (1) A lineis notparalle to l a plane b nˆ 0, d 0 (2) A lineis paralle to l a plane b nˆ 0 d | (a r ) nˆ | b nˆ ar r O ˆ ˆ ˆ Ex: A line is given by r a b, where a i 2 j 3kand b 4iˆ 5 ˆj 6kˆ Find the coordinates of the point P at which the line intersects the plane x+2y+3z=6. n iˆ 2 ˆj 3kˆ an d b n 4 10 18 0 r a b xiˆ yˆj zk (4 1)iˆ ( 2 5 ) ˆj ( 3 6 )kˆ x 4 1, y 2 5 an d z 3 6 pu t in toplan ee q. -1/4 x 0, y 3 / 4 an d z 3 / 2 (0,3 / 4,3 / 2) is th ein te rse cti n g poin t a Chapter 7 Vector algebra 7.9 Reciprocal vectors and ' ' ' are called reciprocal sets if The twosets of vectors a , b, c a ,b ,c ' ' ' aa b b c c 1 ' ' ' ' ' ' a b a c b a b c c a c b 0 bc c a ab a' b' c' a (b c ) a (b c ) a (b c ) whe re a (b c ) 0, a , b andc are not coplanar ' ' ' if a , b andc are m utuallyorthogonalunitve ctorsthe na a , b b , c c ˆ Ex: Construct the reciprocal vector of a 2i , b ˆj kˆ andc iˆ kˆ a (b c ) 2iˆ [( ˆj kˆ ) ( iˆ kˆ )] 2 a ' ( ˆj kˆ ) ( iˆ kˆ ) / 2 ( iˆ ˆj kˆ ) / 2 ' b ( iˆ kˆ ) 2iˆ / 2 ˆj c ' 2iˆ ( ˆj kˆ ) / 2 ˆj kˆ Chapter 7 Vector algebra Define the components of a vector a with respect basis vectors eˆ1 , eˆ2 andeˆ3 that are not mutually orthogonal. (1) For C arte si anbai sive ctoriˆ , ˆj an d kˆ a (a iˆ )iˆ (a ˆj ) ˆj (a kˆ )kˆ (2) Foe n on- orth on ormlabasi se1 , e2 an de3 , i tsre ci procal basi sve ctori s e1' , e2' an de3' a a1eˆ1 a 2 eˆ 2 a 3 eˆ 3 a e1' a1eˆ1 eˆ1' a 2 e2 eˆ1' a 3 eˆ 3 eˆ1' a1 a 2 a eˆ 2' a 3 a eˆ 3' a (a eˆ1' )eˆ1 (a eˆ 2' )eˆ 2 (a eˆ 3' )eˆ 3