Mar21
advertisement

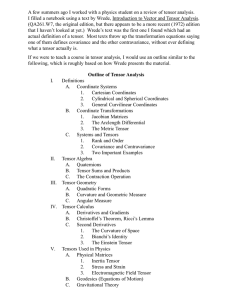
March 21, 2011 Turn in HW 6 Pick up HW 7: Due Monday, March 28 Midterm 2: Friday, April 1 4-vectors and Tensors Four Vectors x,y,z and t can be formed into a 4-dimensional vector with components 0 x ct x1 x x y 2 x3 z Written x 0 , 1 , 2 , 3 4-vectors can be transformed via multiplication by a 4x4 matrix. The Minkowski Metric 1 0 0 0 0 0 0 1 0 0 0 1 0 0 0 1 Or 1if 0 1if 1,2 0if Then the invariant s s c t x y z 2 2 2222 can be written 3 3 s 2 0 0 xx It’s cumbersome to write 3 3 s 2 0 0 xx So, following Einstein, we adopt the convention that when Greek indices are repeated in an expression, then it is implied that we are summing over the index for 0,1,2,3. (1) becomes: s xx 2 (1) Now let’s define xμ – with SUBSCRIPT rather than SUPERSCRIPT. Covariant 4-vector: x Contravariant 4-vector: x x 0 ct x 0 ct x1 x x1 x x2 y x3 z More on what this means later. x y 2 x3 z x x So we can write x x i.e. the Minkowski metric, can be used to “raise” or “lower” indices. 2 s x x Note that instead of writing we could write s xx 2 assume the Minkowski metric. The Lorentz Transformation 0 0 0 0 where 0 0 1 0 0 0 0 1 v 1 and 2 c 1 Notation: F 00 F 10 F F 20 30 F F 01 F 02 F 03 F 11 F 12 F 13 F 21 F 22 F 23 F 31 F 32 F 33 Instead of writing the Lorentz transform as x ( x vt ) y y z z v t (t 2 x ) c we can write x x 0 0 ct t x x 0 0 x x 0 y y 0 10 0 01 0 z z or ct ct x x x ct y y z z We can transform an arbitrary 4-vector Aν A A 0for 1 for Kronecker-δ Define 1 0 0 0 Note: (1) 0 0 0 1 0 0 0 1 0 0 0 1 (2) For an arbitrary 4-vector A A A Inverse Lorentz Transformation ~ We wrote the Lorentz transformation for CONTRAVARIANT 4-vectors as x x The L.T. for COVARIANT 4-vectors than can be written as ~ x x Since where ~ s xx is a Lorentz invariant, xx xx ~ x x x x ~ or Kronecker Delta 2 General 4-vectors Transforms via A (contravariant) A A A A Covariant version found by Minkowski metric Covariant 4-vectors transform via ~ A A Lorentz Invariants or SCALARS A A Given two 4-vectors and B B SCALAR PRODUCT A A BB This is a Lorentz Invariant since A B ~ A B ~ A B A B A B Note: A A can be positive (space-like) zero (null) negative (time-like) The 4-Velocity dx u d (1) The zeroth component, or time-component, is 0 dx dt 0 u c c d d u and where u 1 u2 1 2 c u u mag of ord the el dxdydz , , dt dt dt Note: γu is NOT the γ in the Lorentz transform which is 1 v2 1 2 c dx u d The 4-Velocity (2) The spatial components i dx i i u uu d So the 4-velocity is c uuu where u 1 u2 1 2 c u ord the el So we had to multiply by u to make a 4-vector, i.e. something whose square is a Lorentz invariant. dxdydz , , dt dt dt u u How does so... u transform? u0 (u0 u1) u1 (u0 u1) u2 u2 u3 u3 where u u 2 u 1 2 c u 1 c v 1 2 c 2 2 2 or uc(cu uu ) 1 1 uu (cu uu ) uu2 uu2 uu3 uu3 1/ 2 1 / 2 1 / 2 where v=velocity between frames 1 Wave-vector 4-vector Recall the solution to the E&M Wave equations: E exp( i k r it ) The phase of the wave must be a Lorentz invariant since if E=B=0 at some time and place in one frame, it must also be = 0 in any other frame. /c k k Tensors (1) Definitions zeroth-rank tensor first-rank tensor second-rank tensor Lorentz scalar 4-vector 16 components: (2) Lorentz Transform of a 2nd rank tensor: T T T 0,1,2,3 0.1.2.3 (3) T T contravariant tensor covariant tensor related by T T transforms via ~ ~ T T (4) Mixed Tensors one subscript -- covariant one superscript – contra variant T T T T so the Minkowski metric “raises” or “lowers” indices. (5) Higher order tensors (more indices) T T etc (6) Contraction of Tensors Repeating an index implies a summation over that index. result is a tensor of rank = original rank - 2 Example: T is the contraction of T (sum over nu) (7) Tensor Fields A tensor field is a tensor whose components are functions of the space-time coordinates, 0 1 2 3 x ,x ,x ,x (7) Gradients of Tensor Fields Given a tensor field, operate on it with x for x x 0, x1, x 2, x 3 to get a tensor field of 1 higher rank, i.e. with a new index Example: if scal ar then x We denote x is a covariant 4-vector as , Example: if T is a second-ranked tensor T , x where third rank tensor co the o T m f (8) Divergence of a tensor field Take the gradient of the tensor field, and then contract. Example: A Divergence is A , Divergence is T, Given vector Example: Tensor T (9) Symmetric and anti-symmetric tensors If If T T T T then it is symmetric then it is anti-symmetric COVARIANT v. CONTRAVARIANT 4-vectors Refn: Jackson E&M p. 533 Peacock: Cosmological Physics Suppose you have a coordinate transformation which relates or x to x 0 1 2 30 1 2 3 x , x , x , x x , x , x , x by some rule. A COVARIANT 4-vector, Bα, transforms “like” the basis vector, or 0 1 2 3 x x x x x or B B B B B B B 0 1 2 3 x x x x x A CONTRAVARIANT 4-vector transforms “oppositely” from the basis vector x A A x For “NORMAL” 3-space, transformations between e.g. Cartesian coordinates with orthogonal axes and “flat” space NO DISTINCTION Example: Rotation of x-axis by angle θ y’ y x x’ But also so x dx dx x dx dx dx dx x cos cos x cos cos dx dx Peacock gives examples for transformations in normal flat 3-space for non-orthogonal axes where dx dx dx dx Now in SR, we add ct and consider 4-vectors. However, we consider only inertial reference frames: - no acceleration - space is FLAT So COVARIANT and CONTRAVARIANT 4-vectors differ by A A Where the Minkowski Matrix is 1 0 0 0 0 0 0 1 0 0 0 1 0 0 0 1 So the difference is the sign of the time-like component Example: Show that xμ=(ct,x,y,z) transforms like a contravariant vector: xx ct ctct x x x x x x 0 1 2 3 x x x x 0x 1x 2x 3x x x x x Let’s let 0 x ct ' x 0 x ct 0 x x 1 x x 1 x In SR In GR x x A g A g th metric ten e so Gravity treated as curved space. Of course, this type of picture is for 2D space, and space is really 3D Two Equations of Dynamics: 2 d x dx dx 0 2 d d d 22 c d g d d x x where and proper e tim g g g 1 g 2 x x x = The Affine Connection, or Christoffel Symbol For an S.R. observer in an inertial frame: 1 0 g 0 0 0 1 0 0 0 0 1 0 0 0 0 1 And the equation of motion is simply 2 dx 0 2 d Acceleration is zero. Covariance of Electromagnetic Phenomena Covariance of Electromagnetic Phenomena 4-current and 4-potentials Define the 4-current where j c j j = 3-vector, current = charge density Recall the equation for consersvation of charge: In tensor notation j ,0 j0 t Let’s look at all this another way: Consider a volume element (cube) with dimensions containing N electrons Charge in the cube = N e Charge density Ne 0 3 l0 Suppose in the K’ frame, the charges are at rest, so that the current j0 0 What is the current in the K frame? Assume motion with velocity v, parallel to the x-direction l0 l0 l0 The volume in K will be l0 1 v 2 c l0 l0 l0 1 length contraction in one direction The number of electrons in the volume must be the same in both the K and K’ frames. Thus, Ne l0 1 3 v 2 c 0 1 v 2 c 3 v 2 c Similarly, for the current: j v Nev l0 3 1 v 2 c 0 v 1 v 2 c Now, in analogy to the expression for proper time: 2 22 2222 c c t x y z we can write c 2 2 jx jy jz c 20 2 2 2 2 The transformation equations are: jx j x v 1- v 2 c jy j y jz j z vj x /c 2 1- v 2 c 4-Potential Recall the vector potential which satisfied A scalar potential and 2 1 A 4 2 A 2 2 j c t c 1 2 2 2 2 4 c t and the Lorentz guage Define the 4-potential 1 A 0 c t Ax A A Ay A z 1 A 0 c t can be written 2 1A 4 2 A 2 2 j c t c 1 2 2 2 2 4 c t A, 0 become 4 , A , j c 4-vector Wh about E an B ? at d Recall that E and B are related to A and φ by BA 1A E c t E and B have 6 independent components, so we’ll write the Electro-magnetic force as an anti-symmetric 2nd rank tensor with 6 independent components: F A , A , F A , A , Can show that E E 0 E x y z 0 B B E x z y F E B 0 B z x y E B B 0 y x z We can re-write Maxwell’s Equations E4 1E 4 B j c t c B0 1B E 0 c t 4 F j c , F F F 0 , , , More Notation: Instead of writing F F F 0 , , , Write F 0 , where [ ] means: permute indices even permutations + sign odd permutations - sign E.G.: A A A Transformation of E and B: Lorentz transform Fμν Let ~ ~ F F vvelocity between frame K' and K v c E component of E ,B parallel to v |, |B | | E ,B component perp. to v E E B B || || || || E E B B B E or, for v = velocity in x-direction Ex Ex Ey Ey vBz Ez Ez vBy Bx Bx vE z By By 2 c vE y B z B z 2 c NOTE: The concept of a pure electric field (B=0) or a pure magnetic field (E=0) is NOT a Lorentz invariant. if B=0 in one frame, in general 0 in other frames E 0and B What is invariant? (1) F F i.e. (2) r2 r 2 2 B E 2 2 2 2is an invariant B E B E r r det F E B so 2 is an invariant E B E B Fields of a Uniformly Moving Charge If we consider a charge q at rest in the K’ frame, the E and B fields are qx Ex 3 r qy Ey 3 r qz Ez 3 r where Bx 0 By 0 Bz 0 r x y z 3 2 2 2 3/2 Transform to frame K We’ll skip the derivation: see R&L p.130-132 The field of a moving charge is the expression we derived from the Lienard-Wiechart potential: r E q r2 r r n 1 r3 2 R We’ll consider some implications 1 n Consider the following special case: (1) charged particle at x=y=z=0 at t=0 v = (v,0,0) uniform velocity (2) Observer at x = z = 0 and y = b sees Ex Ey qvt v t 2 2 2 b 2 3/2 qvb v t 2 2 2 b Ez 0 Bx By 0 Bz Ey 2 3/2 What do Ex(t), Ey(t) look like? Ex(t) and Ey(t) (1) max(Ey) >> max (Ex) particularly for gamma >>1 (2) Ey, Bz strong only for 2t0 (3) max( Ey) max( Ex) t0 b v As particle goes faster, γ increases, E-field points in y-direction more Ex(t) and Ey(t) (4) The observer sees a pulse of radiation, of duration (5) When gamma >>1, β~1 so (6) To get the spectrum that the observer sees, take the B E E z y y fourier transform of E(t) E(w) We can already guess the answer 2b v The spectrum will be where ˆ() E dW ˆ 2 c E ( ) dAd is the fourier transform 1 Eˆ ( ) E y (t)e it dt 2 qb 2 2 2 2 3 / 2 it v t b e dt 2 The integral can be written in terms of the modified Bessel function of order one, K1 qb b ˆ E ( ) K 1 b v v v The spectrum cuts off for ~ v b Rybicki & Lightman give expressions for dW d and some approximate analytic forms -- Eqns 4.74, 4.75 see Numerical Recipes Bessel Functions Bessel functions are useful for solving differential equations for systems with cylindrical symmetry Bessel Fn. of the First Kind Bessel Fn. of the Second Kind Jn(z), n integer Yn(z), n integer Jn, Yn are linearly independent solutions of 2 d y dy 2 2 2 z z z n y 0 2 dz dz Modified Bessel Functions: I ( z ), K ( z ) ar solu e to n n 2 d y dy 2 2 2 z z z n y 0 2 dz dz