7. Physical Memory

7. Physical Memory
7.1 Preparing a Program for Execution
–
Program Transformations
–
Logical-to-Physical Address Binding
7.2 Memory Partitioning Schemes
–
Fixed Partitions
–
Variable Partitions
– Buddy System
7.3
Allocation Strategies for Variable Partitions
7.4
Dealing with Insufficient Memory
Operating Systems 1
Preparing Program for Execution
• Program Transformations
– Translation (Compilation)
– Linking
– Loading
Operating Systems 2
Address Binding
•
Every logical address must be mapped to a physical address
•
This may occur at once or in stages
• Each time the program is moved from one address space to another: Relocation
• Static binding
–
Programming time
–
Compilation time
– Linking time
– Loading time
•
Dynamic binding
– Execution time
Operating Systems 3
Static Address Binding
• Different addresses are bound at Programming,
Compilation, Linking, or Loading Time
•
All addresses are bound (physical) before execution starts
Operating Systems 4
Dynamic Address Binding
• Binding to physical address is delayed until execution time – just prior to memory access same as before
Operating Systems 5
Address Binding
• How to implement dynamic binding
– Must transform each address at run time: pa = address_map(la)
– Simplest form of address_map: Relocation Register : pa = la + RR
– More general form:
• Page or Segment Table (Chapter 8)
Operating Systems 6
Memory Partitioning Schemes
The problem:
• Memory is a single linear sequence
• Every program consists of several components (program, data, stack, heap)
• Some of the components are dynamic in size
•
Multiple programs need to share memory
• How to divide memory to accommodate all these needs?
– Fixed partitions, variable partitions
Operating Systems 7
Fixed Partitions
• Single-program system: 2 partitions (OS/user)
– System must manage dynamic data structures within each partition
• Multi-programmed systems: need n partitions
–
Different-size partitions
• Program size limited to largest partition
• Internal fragmentation (unused space within partitions)
• How to assign processes to partitions ( scheduling : smallest possible, smallest available, utilization vs starvation)
–
Same-size partitions (most common)
• Must permit each component to occupy multiple partitions (pages, Chapter 8)
Operating Systems 8
Variable Partitions
• Memory not partitioned a priori
• Each request is allocated portion of free space
• Memory = Sequence of variable-size blocks
– Some are occupied, some are free (holes)
•
External fragmentation occurs: many small holes
• Adjacent holes (right, left, or both) must be coalesced to prevent increasing fragmentation
Operating Systems 9
Implementation
• How to keep track of holes and allocated blocks?
• Requirements: Must be able to efficiently:
– Find a hole of appropriate size
– Release a block (coalesce)
• Bitmap implementation
•
Linked list implementation
– Problems:
• How to know the size of a hole or block
• How to know if neighbor is free or occupied
Operating Systems 10
Linked List Implementation 1
• Type
, Size tags at the start of each block/hole
• Holes contain links to previous and next hole (why not blocks?)
• Checking neighbors of released block (e.g. C below):
– Right neighbor (easy): Use size of C
– Left neighbor (clever): Use sizes to find first hole to C ’s right, follow its back link to first hole on C ’s left, and check if it is adjacent to C .
– Holes must be sorted by physical address
Operating Systems 11
Linked List Implementation 2
• Better solution (due to Donald Knuth, Stanford U.)
– http://en.wikipedia.org/wiki/Donald_knuth
– Replicate tags at both ends
• Checking neighbors of released block C :
– Right neighbor: Use size of C as before
– Left neighbor: Check its (adjacent) type , size tags
• Holes need not be sorted
– insert is easier (append at end)
Operating Systems 12
Bitmap Implementation
• Memory is divided into fix-size blocks
• Bitmap: binary string, 1 bit/block: 0 =free, 1 =allocated
• Implemented as char , integer, or byte array
Example: B[0], B[1], … = 0010 0111, 0001 0000, … blocks 2, 5-7, 11 … are occupied
• Operations:
– Release : AND with 0
– Allocate : OR with 1
–
Search for free block (look for 0): Repeat:
AND with 1; if result=0 then stop, else consider next bit
• Operations use bit masks:
M[0], M[1], …,M[7 ] = 1000 0000, 0100 0000,…, 0000 0001
M’[0],M’[1],…,M’[7] = 0111 1111, 1011 1111, …, 1111 1110
Operating Systems 13
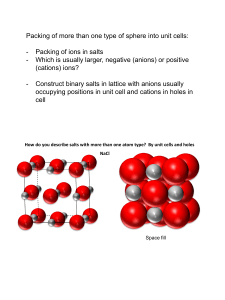
Example
Assume
• Memory is broken into blocks of size 1KB
• Memory map is a byte array
• Release block D:
B[1] = B[1] & '11011111‘
B[1] = B[1] & M’[2]
• Allocate first 2 blocks of block A:
B[0] = B[0] | '11000000‘
A 3 KB Free
B 2 KB Occupied
C 5 KB Free
D 1 KB Occupied
E 5 KB Free
B[0] B[1]
000 11 000 00 1 00000
B[0] = B[0] | M[0] | M[1] 000 11 000 00000000
11 0 11 000 00 1 00000
14 Operating Systems
Allocation Strategies with Variable Partitions
• Task: Given a request for n bytes, find hole
≥ n
• Goals:
– Maximize memory utilization (minimize external fragmentation)
– Minimize search time
• Search Strategies:
– First-fit: Always start at same place. Simplest.
–
Next-fit: Resume search. Improves distribution of holes.
–
Best-fit: Closest fit. Avoid breaking up large holes.
–
Worst-fit: Largest fit. Avoid leaving tiny hole fragments
• First Fit is generally the best choice—how to measure?
Operating Systems 17
Measures of Memory Utilization
• Compare number of blocks versus number of holes
–
50% rule (Knuth, 1968):
#holes = p × #full_blocks/2 p = probability of inexact match (i.e., remaining hole)
– In practice p=1 , because exact matches are highly unlikely, so
#holes = #full_blocks/2
– 1/3 of all memory block are holes, 2/3 are occupied
• How much memory space is wasted?
– If average hole size = average full_block size then
33% of memory is wasted
– If average sizes are different?
Operating Systems 18
How much space is unused (wasted)
• Utilization depends on the sizes ratio k = hole_size/block_size unused_memory = k/(k+2)
• Intuition:
– When k=1 , unused_memory
1/3 (50% rule)
– When k
, unused_memory
1 (100% empty)
– When k
0 , unused_memory
0 (100% full)
• What determines k ?
– The block size b relative to total memory size M
– Determined experimentally via simulations:
• When b
M/10 , k=0.22
and unused_memory
0.1
• When b=M/3 , k=2 and unused_memory
0.5
• Conclusion: M must be large relative to b
Operating Systems 19
Dealing with Insufficient Memory
•
Swapping
– Temporarily move process to disk
– Requires dynamic relocation
• Virtual memory (Chapter 8)
– Allow programs large than physical memory
– Portions of programs loaded as needed
• Memory compaction
– Move blocks around to create larger holes
– How much and what to move?
Operating Systems 20
Memory compaction
Initial Complete
Operating Systems
Partial Minimal
21