Task allocation in Multi Robots System
advertisement

INDIAN INSTITUTE OF TECHNOLOGY MADRAS
Department of Engineering Design
ROBOTICS LABORATORY
Agent Based Control Architecture in Multiple Mobile Robots for Cooperative Tasks.
Task Allocation is one of the key modules in a multi-robot system. It is a mechanism which determines the assignment of tasks for
each robot in the system so as to achieve the overall mission objectives. The existing allocation methodologies can only provide
solution to a specific problem domain and cannot be generalized on the merits of cooperative tasks. The task allocation module
should also adapt to the changes in the environment and the behaviors of the robots during the mission. In order to develop a system
for cooperative tasks working in a multiple heterogeneous mobile robots environment, there is a need for creation of a control
architecture and an optimal task allocation scheme to handle heterogeneous group of robots.
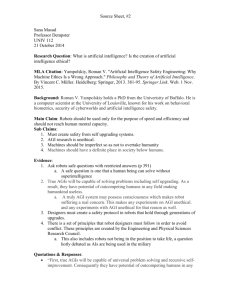
Control Architecture for Cooperative Task Allocation
• To design and develop control architecture for agent
based multiple mobile robots with cooperative tasks.
Task Interaction
Results
Robot 2
Robot 1
Task Allocation
Algorithm
Tasks (subtasks)
Tasks (subtasks)
Computational
Tasks
Task Interaction
Task Interaction
Remote Execution
Robot 3
Platform
Objective
The whole architecture must assure the safety of the
robot and the environment, so it should provide the
mechanisms to deal with hardware and software
failures.
• To develop planning and task allocation algorithm
with scheduling strategies and thereafter the
communications schemes for cooperation.
Task Interaction
Results
Task Allocation without Cooperation Vs. Task Allocation with Cooperation
T1 = { RC-A,
PC-2 }
Allocation
without
cooperation :
T1-R2,then T2-R2
Task Allocation without Cooperation among
robots for cooperative task
T
T2 = { RC-A,
RC-C
PC-2 }
Allocation with
cooperation:
T2-R2 and T1-R3
R1 = {RC-A1,
RC-B , PC-1 }
R2 = {RC-A2,
RC-C, PC-1,
PC-2 }
T1
T2
T-Task
R-Robot
R1
R3 = {RC-A3,
RC-B, PC-2}
R3
R2
Task Allocation with Cooperation among robots
for cooperative task
T
T1
T-Task
T2
R-Robot
T – Task
R - Robot
RC - Robot Capabilities (Hardware) – { A-A1,A2,A3, B , C }
PC - Processing Capabilities (Software) – { PC1,PC2 }
R1
R2
R3
Multiple Robot Task Allocation
Multiple Robot Task Allocation is a mapping of tasks Tn to robots Rm according to a Cost function U
U (Ti* , R*j )
Tn Rm
U = Processing cost + Communication cost
Where processing cost is the total amount of execution cost for all the tasks, Communication cost is the total amount for the
interaction among tasks assigned to different robots.
Researchers : Thareswari. N , Dr. Asokan Thondiyath