THE
RISE OF THE
CRASH-PROOF CAR
John Capp &
Bakhtiar
Litkouhi
IEEE Spectrum
May 2014
IS 376
September 4,
2014
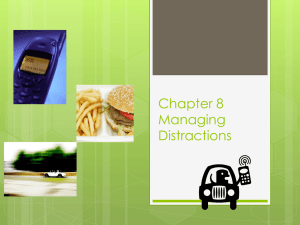
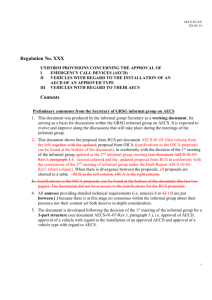
WATCHFUL CARS
THE TRANSPORTATION
INFRASTRUCTURE (ROAD SIGNS,
TRAFFIC SIGNALS, ETC.) TRANSMIT
CURRENT LOCAL CONDITIONS
WIRELESS
COMMUNICATION
BETWEEN
VEHICLES HELPS
PREVENT
COLLISIONS
IS 376
SEPTEMBER 4, 2014
SATELLITE
SYSTEMS PROVIDE
NAVIGATION DATA
SENSORS PROVIDE
INFORMATION ABOUT
THE IMMEDIATE VICINITY
SURROUNDING THE CAR
PEDESTRIANS AND CYCLISTS WITH WEARABLE DEVICES (E.G.,
MOBILE PHONES) MAKE THEIR PRESENCE KNOWN TO THE VEHICLE
THE RISE OF THE CRASH-PROOF CAR
PAGE 2
SATELLITE NAVIGATION
GLOBAL POSITION SYSTEMS USE TRILATERATION
TO PINPOINT THE LOCATION OF A RECEIVER.
MULTIPLE SATELLITES ORBIT THE
EARTH, TRANSMITTING THEIR
CURRENT POSITIONS.
THE RECEIVING STATION COMPUTES ITS DISTANCE FROM THREE OF
THOSE SATELLITES AND CALCULATES THE TWO POINTS OF
INTERSECTION OF THE APPROPRIATE SPHERES SURROUNDING THEM.
ONE OF THOSE TWO POINTS IS ON THE SURFACE OF THE EARTH, AND THAT POINT IS
THE GPS LOCATION OF THE RECEIVER.
TO COMBAT ATMOSPHERIC CONDITIONS AND STRUCTURAL INTERFERENCE, THE
SATELLITES PERIODICALLY TRANSMIT TO EARTH STATIONS WITH FIXED LOCATIONS,
ADJUSTING THEIR CALCULATIONS ACCORDINGLY.
IS 376
SEPTEMBER 4, 2014
THE RISE OF THE CRASH-PROOF CAR
PAGE 3
360°
SENSING
ULTRASONIC SENSORS USE ACOUSTIC WAVES TO PROVIDE PROXIMITY DETECTION
FOR LOW-SPEED EVENTS; IT IS BLIND IF THE CAR IS MOVING FASTER THAN A PERSON
CAN WALK.
RADAR (RADIO DETECTION AND RANGING) IS MUCH MORE EXPENSIVE, BUT WORKS IN
ANY KIND OF WEATHER AND HAS SHORT-, MEDIUM-, AND LONG-RANGE CAPABILITIES
TO SUPPORT ADAPTIVE CRUISE CONTROL, BLIND-SPOT DETECTION, ETC.
IS 376
SEPTEMBER 4, 2014
THE RISE OF THE CRASH-PROOF CAR
PAGE 4
V2V COMMUNICATION
VEHICLE-TO-VEHICLE COMMUNICATIONS IS A PROPOSED WIRELESS NETWORK IN
WHICH AUTOMOBILES SEND MESSAGES TO ONE ANOTHER ABOUT WHAT THEY’RE
DOING (E.G., SPEED, LOCATION, DIRECTION OF TRAVEL, BRAKING, LOSS OF
STABILITY).
WITH A COMMUNICATION
RANGE OF 1000 FEET AND THE
ABILITY TO RETRANSMIT
RECEIVED SIGNALS, V2V
COULD POTENTIALLY MAKE
CERTAIN THAT DRIVERS
ALWAYS HAVE INFORMATION
CONCERNING TRAFFIC
CONDITIONS A MILE AHEAD.
IN AUGUST 2014, THE U.S. DEPARTMENT OF TRANSPORTATION ANNOUNCED PLANS
TO CREATE A NEW FEDERAL MOTOR VEHICLE SAFETY STANDARD REQUIRING V2V
COMMUNICATION CAPABILITY FOR LIGHT VEHICLES (PROBABLY BY 2016).
IS 376
SEPTEMBER 4, 2014
THE RISE OF THE CRASH-PROOF CAR
PAGE 5
V2I
COMMUNICATION
THE U.S. DEPARTMENT OF TRANSPORTATION IS DEVELOPING THE REQUIREMENTS
FOR A VEHICLE-TO-INFRASTRUCTURE SYSTEM.
RED LIGHT VIOLATION
WARNING
ROADSIDE EQUIPMENT
(RSE) BROADCASTS
SIGNAL PHASE AND TIMING
(SPAT) MESSAGE,
GEOMETRIC INTERSECTION
DESCRIPTION, AND GPS
CORRECTION
IN-VEHICLE DEVICE
DETERMINES IF VEHICLE IS
IN DANGER OF VIOLATING A
RED LIGHT
IS 376
SEPTEMBER 4, 2014
CURVE SPEED
WARNING
ROADSIDE EQUIPMENT
BROADCASTS GEOMETRIC
AND WEATHER
INFORMATION TO INVEHICLE DEVICE
IN-VEHICLE DEVICE
DETERMINES
APPROPRIATE SPEED FOR
THAT PARTICULAR
VEHICLE, WITH WARNINGS
TAILORED TO SPECIFIC
VEHICLE CAPABILITIES
STOP SIGN GAP ASSIST
ROADSIDE SENSORS
DETECT ONCOMING TRAFFIC
ROADSIDE EQUIPMENT
BROADCASTS TRAFFIC
STATUS
IN-VEHICLE DEVICE
DETERMINES IF THERE IS
ANY DANGER FOR VEHICLE
ON MINOR ROAD
THE RISE OF THE CRASH-PROOF CAR
RAILROAD CROSSING
VIOLATION WARNING
ROADSIDE EQUIPMENT
CONNECTED WITH EXISTING
TRAIN DETECTION
EQUIPMENT
IN-VEHICLE DEVICE
DETERMINES PROBABILITY
OF VEHICLE CONFLICT WITH
APPROACHING TRAIN AND
ISSUES ALERT TO DRIVER
PAGE 6
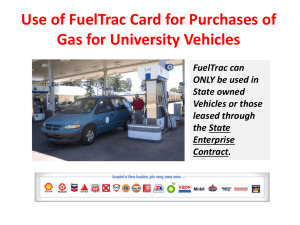
MORE V2I COMMUNICATION
SPOT WEATHER IMPACT WARNING
ROADSIDE EQUIPMENT CONNECTED TO
REMOTE WEATHER INFORMATION
SYSTEM (RWIS)
WEATHER EVENTS AND LOCATIONS
BROADCAST TO VEHICLE IN REAL-TIME
IN-VEHICLE DEVICE ISSUES ALERT TO
DRIVER
IS 376
SEPTEMBER 4, 2014
OVERSIZE VEHICLE WARNING
ROADSIDE EQUIPMENT
BROADCASTS BRIDGE/TUNNEL
DIMENSIONS AND DETECTED
VEHICLE DIMENSIONS TO OVERSIZE
VEHICLE
IN-VEHICLE DEVICE ISSUES ALERT
TO DRIVER TO TAKE ALTERNATE
ROUTE OR A WARNING TO STOP
REDUCED SPEED/WORK ZONE
WARNING
ROADSIDE SENSORS CONNECTED TO
TRAFFIC MESSAGE CHANNEL (TMC)
AND/OR LOCAL NETWORK IN WORK
ZONE
ROADSIDE EQUIPMENT BROADCASTS
SPEED LIMIT INFORMATION AND WORK
ZONE INFORMATION
IN-VEHICLE DEVICE ISSUES ALERT TO
DRIVER TO REDUCE SPEED, CHANGE
LANES, AND/OR PREPARE TO STOP
THE RISE OF THE CRASH-PROOF CAR
PAGE 7
ROBOT, YOU
CAN DRIVE
MY CAR
Philip E. Ross
IEEE Spectrum
June 2014
GOOGLE CAR
In 2010, Google modified a Toyota Prius with an array of sensors to
navigate public roads without a human driver.
A rotating sensor on
the roof scans more
than 200 feet in all
directions to
generate a precise 3D
map of the car’s
surroundings.
A sensor mounted on the left
rear wheel measures small
movements made by the car and
helps to accurately locate its
position on the map.
A video camera mounted near the rear-view
mirror detects traffic lights and helps the car’s
onboard computers recognize moving
obstacles like pedestrians and cyclists.
IS 376
September 4, 2014
ROBOT, YOU CAN DRIVE MY CAR
Four radar sensors, three in
front and one in the rear, help
determine the positions of
distant objects.
Page 9
VOLVO SARTRE
The expense and complexity of the Google
system encouraged Volvo to pursue the Safe
Road Trains for the Environment project,
using the concept of “platooning”.
A driver finds a platoon that’s going the
right way by selecting a destination and
following the navigation system’s
directions. The driver joins the platoon
at the rear and the system takes control.
When one car leaves the
platoon, the following cars
automatically close the gap and
continue until their drivers
decide to peel off and go their
own way.
A professional drives the
platoon’s lead vehicle, which
communicates with the
following cars by radio.
IS 376
September 4, 2014
Drivers in the following vehicles relax. When
the platoon approaches their various
destinations, each driver pulls to the side and
drives on independently.
ROBOT, YOU CAN DRIVE MY CAR
Page 10
VOLVO: MAGNETIC ROADS
In February 2014, Volvo unveiled its research on
the concept of embedding magnets in roadways
as a means of supporting driverless cars.
Their conclusion was that, at a cost of $109
per car and $40K per mile on a two-line road,
it represents the most economically feasible
approach currently in existence.
IS 376
September 4, 2014
ROBOT, YOU CAN DRIVE MY CAR
Page 11
SAFETY ISSUE: INATTENTION
A recent study by the Highway Loss Data
Institute indicates that many vehicles with
lane departure warning systems actually
experienced an increase in collisions.
To some critics, this provides supporting
evidence that dependence on such systems
may cause drivers to reduce their vigilance
during driving.
IS 376
September 4, 2014
ROBOT, YOU CAN DRIVE MY CAR
Page 12
SAFETY ISSUE: HACKING
Advanced driver assistance systems, such as emergency braking and intersection
surveillance, could potentially be invaded by external hackers.
Current proposed measures to combat such hacking are primarily variations of
the safety and security procedures used in the aviation industry.
IS 376
September 4, 2014
ROBOT, YOU CAN DRIVE MY CAR
Page 13
SAFETY ISSUE: IRRESPONSIBILITY
Will reliance on advanced safety features result in irresponsible
behavior behind the wheel?
IS 376
September 4, 2014
ROBOT, YOU CAN DRIVE MY CAR
Page 14
PREDICTED TIMELINE
1948
2003
2007
2020?
2025?
Modern
Cruise
Control
Pre-Crash
Mitigation
System
DARPA
Urban
Challenge
Driverless
Traffic Jam
Assistance
DriverSupported
Autonomous
1966
2001
Mechanical
Antilock
Brakes
LaneDeparture
Warning
1987
Electronic
Stability
Control
IS 376
September 4, 2014
2010
2018?
2030?
Google Car
First V2V &
V2I Vehicles
Fully
Autonomous
Cars
1995
2012
2014
2032?
Adaptive
Cruise
Control
Nevada
Autonomous
Car Licenses
NHTSA
Autonomous
Rulemaking
Half of All
New Cars
Autonomous
ROBOT, YOU CAN DRIVE MY CAR
Page 15