Electrical PPT

1
2
• CanSat Is a Simulation of a Real Satellite
• It Performs a Mission and Collects Data
• Typical Missions Can Be Atmospheric Measurements, Video
• Capture, Picture Taking, Communications, or Navigation
• The Missions Can Be Simple or Complex
• The Only Requirement Is that the Mission Must Fit in a Twelve Ounce Soda Can
• This Program will introduce you to
How CanSat is Built
• It Includes most subsystems found in Satellites
3
• CanSat Shall Be Built to Fit in a Standard Soda Can–
• Diameter Is 130+/- 2 mm
• Weight is usually less than 700 gms.
• No Parts of the CanSat Shall Extend Beyond the Surface of the Soda Can Until
Deployed
• CanSat Shall Operate off of Battery or Solar Power
• CanSat Can Use Communications(usually RF communications)
– Antennas Should Be Flexible.
• A Parachute Shall Be Properly Secured to One End of the CanSat.
4
• CanSat Is Launched on a High-
Powered Model Rocket
– The Rocket Is 4” in Diameter and
About 7’ Tall
– Capable of Reaching Over a Mile in
Altitude
– CanSat Is Stowed in the Upper
Airframe Below the Nose Cone
• The Rocket Is Launched and When It
Reaches Apogee, the Rocket Breaks
Apart to Eject the Main Parachute
– This Causes the Upper Portion of the Rocket to Point Down
• The Nose Cone Will Fall Out and the
CanSat Will Fall Afterwards
• The Parachute Brings the CanSat
Gently Back to Earth
5
Team Logo
Here
(If You Want)
• “Satellite is an object which has been placed into orbit by human endeavor” -
Wikipedia
• “An artificial body placed in orbit round the earth or another planet in order to collect information or for communication” – Oxford Dictionary
• Various Definitions for satellites have been given.
• Main concepts for the satellite –
• Orbit around the planet.
• Collects information for sending back to ground station.
6
Team Logo
Here
(If You Want)
• A Satellite Is Made Up of Six Major Subsystems:
• Power Subsystem
• Data Handling Unit/Ground Control Systems
• Communications Subsystem
• Sensor Payload or Subsystems
• Structure
• Attitude Control Subsystem
• Following slides will explain each subsystem in larger detail and will use <satellite name> as reference
7
Team Logo
Here
(If You Want)
• The Power Subsystem Provides Electrical Power to the Satellite. Usually, this is provided using solar panels.
• Solar Panels Are Comprised of Solar Cells, i.e., Semiconductor Devices
Called Photovoltaic.
• Designers Select the Types of Solar Cells to Meet Their Power Requirements,
Budget, Mass and Size.
• Various types of Batteries used in the power system are –
• Ni-Cd.
• NiH
2
• Li-Ion.
• The main precautions required in the design of the power system is the fault detection unit.
8
Team Logo
Here
(If You Want)
• The Data Handling Unit (DHU) Is a Computer That Controls the Flow of Data and Instructions.
– It Controls Payloads and Collects Data From the Payloads
– It Accepts Commands Received by the Communications System and Sends
Data to the Communications System for Transmission to the Ground Station
– It Is the Brains of the Satellite.
9
Team Logo
Here
(If You Want)
• The satellite usually contains a radio receiver for transmitting data to the ground system and receiving commands from the ground station.
• The Spacecraft Has a Transmitter Used to Send Telemetry (i.e., the Name for Data Sent or “Down-Linked” From the Spacecraft).
10
Team Logo
Here
(If You Want)
• Payloads on a Satellite Are Generally Some Type of Sensor
• It Can Be a Radio Receiver Designed to Detect Certain types of
Signals
• It Can Be a Camera Used to Take Pictures of the Earth in Various
Light Spectrums.
• It Can Be Radiation Detectors, or Any Type of Sensor to Detect
Something.
• The sensors are responsible for the navigation and control system.
11
Team Logo
Here
(If You Want)
• The structure of satellite is generally made of Al or other light-weight material.
• Attitude Control Systems Allow the Orientation of the Spacecraft to Be
Controlled.
12
13
• Time Limit: 45 minutes
14
15
Team Logo
Here
(If You Want)
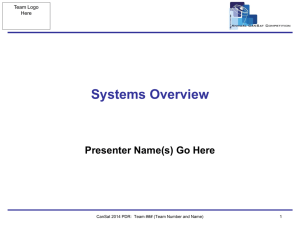
Electrical
Subsystem
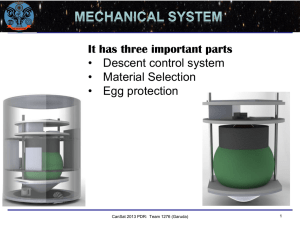
Mechanical
Design
Software
Analysis
16
Team Logo
Here
(If You Want)
Kill switch/signal
Buzzer(5V)
CanSat
Batteries
9V
9V
Motor(9V)
Voltage
Measurement
Hardware(9V)
9V
5V
Arduino
(9V)
3.3 V
5V on/off
Motor Driver(5V)
GPS(3.3V)
Motor
Driver(3.3V)
SD card(3.3V)
P&T
Sensor(3.3V)
Radio
Transceiver(3.3V
17
Team Logo
Here
(If You Want)
• The power budget is the allocation of power to be consumed by the components of the system.
• This requires the analysis of the power requirement of each of the components and is an integral part of the design of the power system.
• This is required to determine the distribution of power and total power required in the system.
18
Team Logo
Here
(If You Want)
• The Antenna selection is done on the basis on Link Budget.
• Link Budget equation –
P
RX
= P
TX
+ G
TX
+ G
RX
– L
TX
– L
RX
– 20log(4πd/λ)
• P: Power
• G: Gain
• L: loss in transmission or receiver
• The last term accounts for channel loss
19
Team Logo
Here
(If You Want)
BMP 085 (T&P sensor)
Sampling rate: 50 KHz
Gather
Data
Buzzer
GPS Data
(Sampling Rate: 1
Hz)
Read GPS Data
MMA 7361
(Accelerometer)
(Sampling rate: 100
Hz)
Impact
Measurement after payload has landed
FSW written on
Arduino Nano
(Payload)
Transmit Data to Ground
Xbee Radio
‘START’ to activate telemetry
Battery Voltage
Data Read
SD Card
Electromechanical
Deployment
Mechanism + Aerobraking structure
20
Team Logo
Here
(If You Want)
• The Communications Subsystem Is a Transmitter Radio Used to transmit telemetry Which Is the Data Collected in the CanSat.
• This system allow the CanSat to send the data back to the Ground Station that can process the data to get relevant information.
• This is one of the most critical parts of the CanSat design that requires the knowledge of the CanSat, the Ground System as well as the channel.
• The following are the selection criterion:
• Gain
• Range
• Frequency
• Price
21
Team Logo
Here
(If You Want)
• The micro-controller is the main data handling unit for the CanSat.
• We are using an Arduino as the microcontroller unit for the CanSat.
• The selection is done considering the following outlined requirements:
Processor Speed(MHz)
Operating Voltage
Data Interface (D/A)
Size(cm x cm)
Flash Memory(kB)
Price(in USD)
Arduino Uno
16
5
14/6
6.5x5.2
32
25
Arduino Mega 2560
16
5
54/16
10.1x5.2
128
65
Arduino Nano
16
5
14/8
4.3x1.85
32
50
22
Team Logo
Here
(If You Want)
Factors affecting sensor selection for a CanSat system: (in priority order)
1) According to the desired operation
2) Operating Frequency, accuracy, sensitivity, range of operation
3) Data interface required
4) Power Consumption
5) Weight, cost and dimensions
23