")
See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/331415540
A review on kinematic analysis and dynamic stable control of space flexible
manipulators
Article in Aerospace Systems · February 2019
DOI: 10.1007/s42401-018-00024-4
CITATIONS
READS
12
741
3 authors, including:
Zhongliang Jing
Jianzhe Huang
Shanghai Jiao Tong University
Shanghai Jiao Tong University
269 PUBLICATIONS 2,523 CITATIONS
60 PUBLICATIONS 849 CITATIONS
SEE PROFILE
All content following this page was uploaded by Jianzhe Huang on 21 March 2019.
The user has requested enhancement of the downloaded file.
SEE PROFILE
Aerospace Systems
https://doi.org/10.1007/s42401-018-00024-4
ORIGINAL PAPER
A review on kinematic analysis and dynamic stable control of space
flexible manipulators
Zhongliang Jing1 · Qimin Xu1 · Jianzhe Huang1
Received: 26 October 2018 / Revised: 3 December 2018 / Accepted: 31 December 2018
© Shanghai Jiao Tong University 2019
Abstract
A review on state of the art of kinematic analysis and dynamic stable control of space flexible manipulators (SFMs) is
presented. Specially, SFM as a significant assembled part of autonomous space robotics (ASRs) play an important role in
precision-positioning and accurateness-controlling for space engineering application since this lightweight structure possesses
a high-efficient payload-to-arm weight ratio. Further, the existing studies of kinematic analysis and dynamic stable control
of SFMs are critically examined to ascertain the trends of research and to identify unsolved problems through comparing
with different methods. Motivated by the current research results of the two aspects, some suggestions for future research are
given concisely in our published literature: (1) a fast eliminate solution algorithm of forward kinematics is presented. (2) Two
observer-based control methods are suggested after dynamic modeling of SFMs. (3) How to choose a suitable closed-loop
strategy to describe system dynamic features is discussed in a comparison study of the two proposed observer-based control
methods.
Keywords Space flexible manipulators · Variable geometry truss · Kinematic analysis · Dynamic stable control
1 Introduction
With the sustaining exploration of extravehicular activities
and the deepening research of space systems, more and more
space missions need to be finished, such as spacecraft capturing and servicing in orbit, repairing disabled satellites,
removing and reusing of space debris, and so on. Taking
harshness and complexity of space environment into account,
space flexible manipulators (SFMs) have important significance in space industrial applications [22, 39, 49, 52–54, 64,
66, 75, 76].
Generally, different changes of configurations have different flexibilities of the SFMs; space flexible manipulation
and control is of special interest in space robotic systems
and vehicles [39, 66, 75, 76]. Therefore, such a class of
ASRs plays a significant role for long-distance operation in
on-orbit servicing (OOS), especially in some special space
B Zhongliang Jing
zljing@sjtu.edu.cn
B Qimin Xu
xuqimin@sjtu.edu.cn
1
School of Aeronautics and Astronautics, Shanghai Jiao Tong
University, Shanghai 200240, China
tasks with unstructured environments [54, 64] since flexible characteristic deformation of SFMs in three-dimensional
coordinate system can be freely reached. Therefore, SFM as
an indispensable significant tool of autonomous OOS technologies becomes a more challenging [49, 53] and promising
project, including the space station remote manipulator system (SSRMS) in Canada by Sallaberger et al. [64] and
orbital express by defense advanced research projects agency
(DARPA) by Friend [22]. Jing et al. [39] reported three main
specific attributes of soft robots to account for SFMs had
excellent prospects in practical space applications.
On the other hand, conventional rigidity manipulators are
often established to be heavy and bulky for high structural
stiffness [66, 71]. Some inherent drawbacks of the structures are difficult to overcome, such as actuators with high
capacity, high power consumption, and low payload ratio,
even if they can be easily controlled. Therefore, some new
flexible manipulators with a high-efficient payload-to-arm
weight ratio are preferred to be selected [39, 49, 53, 54, 66,
75, 76]. However, some drawbacks and new problems of
flexible structures may be yielded. Wang et al. [71] pointed
out that some new problems from flexibility of the structures
were found such as a high degree of elastic vibration especially during the high-velocity maneuver of the manipulators,
123
Aerospace Systems
and joint friction resulted in a very complicated dynamics
especially during low-velocity operation of the manipulators.
Further, the dynamic equations of motion are nonlinear and
of large dimensions. Ultimately, these problems will increase
the difficulty of manipulation and control of SFMs.
To the best of the authors’ knowledge, there have been few
papers to study kinematic analysis and dynamic stable control problems of space flexible manipulators, which are still
open. Motivated by the works of kinematic analysis of SFMs
(Stewart platform manipulator by Dasgupta and Mruthyunjaya [17], planar snake-like robot mechanism by Prada et al.
[58]), and dynamic stable control of SFMs (control and sensor system by Kiang et al. [42], Cartesian control by Aghili
[1]), the current research is an extensive review on kinematic
analysis and dynamic stable control for SFMs is investigated.
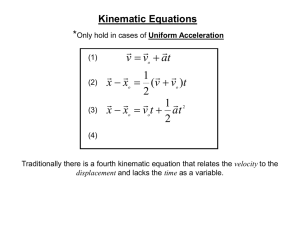
Fig. 2 Snake-like robot using screw-drive mechanism by Fukushima
et al. [24] (@ Copyright 2012 IEEE)
2 Kinematic analysis of space flexible
manipulators
As a typical kind of space structures, space flexible manipulators considered as a class of robotic arms play an important
role in many industrial areas. Since most of the robotic arms
were inspired by biological systems and exhibit optimal flexibility, the biological snake’s movement can be used for
activities such as dimensionally confined space [56, 67], people after earthquakes [41], and pipe systems [40, 80] as shown
in Fig. 1.
On the framework of screw theory, a state-of-the-art
review of the literature on the Stewart platform by Dasgupta
and Mruthyunjaya [17] was investigated, and the authors
reported that one of the salient features of theory of screws
was the enunciation of the duality and reciprocity between
instantaneous kinematics and statics. Thus, it means that different Stewart platforms of SFMs may be maintained with
the same equivalent kinematic mechanism by Hesselroth and
Fig. 3 Positioning and checking mission of SFMs for the OOS by Debus
and Dougherty [18] (@ Copyright 2009 AIAA)
Hennessey [28]. For example, a cable-driven robot by Carricato [10] was considered as one class of the flexible robotics
with a special structure of Stewart platform. Similarly, screwdrive mechanism by Fukushima et al. [24] was applied to one
kind of snake-like robot by Prada et al. [58] as shown in Fig. 2.
Thus, the selection of biological systems is always preferred to some flexible structures in the requirements of a
certain task function for OOS. With the help of SFMs, a
demonstration of positioning and checking mission for the
OOS is shown in Fig. 3.
2.1 Different kinematic analysis methods
Fig. 1 Snake-like robots by Prada et al. [58] (@ Copyright Science and
Education Publishing)
123
Whatsoever, kinematic analysis of flexible manipulators
(FMs) is the first step in studying system performance. In
recent years, many scholars devoted to deriving the kinematic
model by the use of direct topology geometry relationships of
flexible manipulators, such as space orthogonal property by
Jafari and McInroy [37] in different planes, or an equivalent
isomorphic kinematic model [48, 83, 84]. So many kinematic analysis approaches have been attracted, such as direct
Aerospace Systems
kinematic analysis (DKA) [13, 35, 36], algebraic geometry
analysis (AGA) [87, 88], and general natural coordinated
analysis (GNCA) [19, 20].
tation and real time for all serial robot manipulators. Some
details of kinematic transformation matrix are presented,
using the Euler representation for a rotation θ :
2.1.1 Direct kinematic analysis
θ
R exp − π
2
In different hybrid kinematic mechanisms, the research of the
position kinematic problem is still challenged. Innocenti and
Parenti-Catelli reported direct position analysis (DPA) for the
Stewart platform mechanism by Innocenti and Parenti-Catelli
[35], 6–4 fully parallel mechanisms by Innocenti [36]. With
the help of algebraic geometry, Zsombor-Murray and Hyder
[87] analyzed the mobility of a double equilateral tetrahedral
mechanism, and they suggested a unified kinematic approach
based on point transformation by Zsombor-Murray and Gfrerrer [88]. Such a unified approach involves some advantages
such as reducing the complexity of solution and keeping good
dynamic performance. More details are presented as follows.
If p and q are homogeneous point coordinate vectors with
respect to a point P and its image Q under β, the general
Euclidean displacement β in 3-space can be described:
q Mp,
(1)
where M is a 4 × 4 matrix:
⎤
t0 0 0 0
⎢ t1 a 1 a 2 a 3 ⎥
⎥
M⎢
⎣ t2 b1 b2 b3 ⎦,
t3 c1 c2 c3
⎡
(2)
where ai , bi , ci , t i are study parameters for i 1,2,3 seen
in Zsombor-Murray and Gfrerrer [88]. Another interesting
result of a unified kinematic approach was given by Ding
et al. [20], they attempted to construct a unified topological representation model by Ding and Huang [19] based on
the characteristics of topological graphs of planar kinematic
chains.
2.1.2 Geometry algebra analysis
It is not easy to solve inverse kinematics [59, 60] of flexible
manipulators when mathematical statements of forward kinematic equations are complicated, highly nonlinear, coupled
and multiple solutions. However, the problem of inverse kinematics can be dealt with well since several extensive related
investigations of kinematics were discussed using several
geometry algebra (GA) approaches [87, 88]. For example,
Fu et al. [23] applied theory of GA to kinematic modeling
of 6R robot manipulators, so a group of closed-form kinematic equations was generated to reformulate the generalized
eigenvalue problem [4]. The merit of GA approach is to have
a universal meaningfulness on geometric intuition, compu-
θ
cos
2
− π sin
θ
.
2
(3)
Baroon and Ravani [5] used line geometry to develop a
three-dimensional generalized approach [51] based on the
classical Reuleaux method by Eberharter and Ravani [21].
In this theory, direction moment of the screw can be determined by utilizing the common perpendicular relation of
intersect lines, so moment of the screw is transformed into a
Lagrangian conditional minimum problem:
min E s̄ min
s̄
s̄
As̄ T + Bs T · As̄ T + Bs T − λ0 s̄s T
,
(4)
where s̄ is the moment vector, λ0 is a Lagrangian multiplier,
A is a series of direction vectors with respect to screw axis s,
B is an adjoint matrix with respect to A in Plücker coordinates
S (s,s̄).
With the mapping mechanism of distance geometry, Rojas
and Thomas [63] used point geometry (PG) theory to trace
coupler curves of pin-jointed linkages well. Further, a general
GA approach for geometric error modeling of lower mobility
parallel manipulators (LMPMs) was investigated by Lin et al.
[52]. The main advantage of this approach is it is not only that
some desired poses can be separated by dealing with the error
of different signal sources but also several prior conditions
can be obtained by providing for suitable measurements.
2.1.3 General natural coordinated analysis
Through making full use of modularized decoupling relations of feedback controllers, the manipulation and control
capability at the end-effector of the structure was presented
by switching different sub-models of kinematics in Cartesian
coordinates Kim and Kim [44]. The merit of this method is
to minimize structural errors and to weaken negative effect
of measurement errors by means of generalized inverse of
kinematics.
However, the above methods of kinematic analysis are
often referred to coordinate transformation, so the occurrence of transcendental functions in velocity and acceleration
analyses is not easy to be avoided. Motivated by the works
of Waldron and Hunt [70], Zhao et al. [85] utilized tetrahedron coordinate method to discuss kinematic mechanism of
spatial parallel manipulators with four non-coplanar points’
Cartesian coordinates. The rotational matrix is given as
⎤
cψcφ − cθ sφsψ −sψcφ − cθ sφcψ sθ sφ
R ⎣ cψsφ + cθ cφsψ −sψsφ + cθ cφcψ −sθ cφ ⎦, (5)
sψsθ
cψsθ
cθ
⎡
123
Aerospace Systems
where s and c denote sine and cosine, respectively, for the
Euler angles (ϕ, θ , ψ) that describe the orientation of the
manipulator. The merit of this approach is that: (1) extra new
variables are not introduced as the increasing of investigated
points; (2) the inherent intrinsic characteristics of natural
coordinate (NC) method are not lost.
2.1.4 Finite element modular analysis
Recently, Aguirrebeitia et al. [2] proposed eigensensitivity
analysis methodologies by comparing with similar research
[7, 8] for VGT redundant multi-body systems. The reason
is that a complete finite element (FE) model of a VGT
manipulator can be substituted by groups of fewer equivalent parametric macroelements (EPMs):
{U ([δ])} {V ([δ], { A})},
(6)
where all the submodel elastic energies are stored in the vector {U}, all the EPM elastic energies are stored in the vector
{V }, and the parameters are stored in vector {A}. Then the
related EPM parameters in an equivalent mechanism can be
optimized using nonlinear least square principles. More discussion of the parameter estimation is given in Bai et al. [3],
and Chen and Jackson [14].
2.1.5 Structural geometry analysis
1. Symmetrical geometry analysis
As a matter of fact, the topology structure for fundamental units of many SFMs in design is symmetrical since
some symmetry (or mirror) technologies can be straightly
applied to get space vector representation of kinematics. Based on Denavit–Hartenberg transformation (DHT)
method, Williams II [72] reported the kinematic solution process of an adaptive structure with the structural symmetry
using the constraints between flexible-link length (L i , i 1,2,3) and separating points (B Qi , i 1,2,3) of the structure:
⎧
2
−−−→ B
2
⎪
Q2 − B Q1
⎨ L 1 Q1 Q2 2
−−−→ L 22 Q 2 Q 3 B Q 3 − B Q 2 .
⎪
2
⎩ 2 −−−→ L 3 Q3 Q1 B Q1 − B Q3
(7)
As for one class of symmetrical 6–6 Stewart platforms, a
concise algebraic elimination algorithm of the closed-form
forward kinematics was presented by solving a univariate
polynomial equation with a relatively small size by Huang
et al. [33]. If the position vector P between the two origin
points O1 and O2 , and the transformation matrix R in two
different coordinate systems (Ai , Bi , for i 1,…,6) are given,
the leg vectors (L i , i 1,…,6) satisfied
123
L i R Bi + P − Ai .
(8)
But with the increase of rotational degrees of freedom,
the kinematic analysis of flexible manipulators is not feasible
since the corresponding Jacobian matrix cannot be obtained.
To overcome this drawback, some reasonable suggestions
were proposed by Zhao et al. [85]. Further, motion control of free-floating system comprised by multiple VGTs
was studied thoroughly by taking into account two aspects
of kinematic mechanisms: forward kinematics (FKs) and
inverse kinematics (IKs) as in Huang et al. [31, 32]. Based on
conservation of momentum without external force, the geometrical definition of the center of mass of flexible structure
is given by
M G pG N
M ip pi + Mai pi,a + M 0p p0 ,
(9)
i1
where pi,a is the center-of-mass vector of the active plane in
the ith bay, and the masses of a passive plane and an active
plane are M ip and M ia for i 1,…, N, respectively.
2. Asymmetrical geometry analysis
Compared with a similar symmetrical structure, an asymmetrical topology structure of space flexible manipulators
possesses larger workspace [79], and more changeable configurations, so many kinematic analysis approaches of asymmetrical structures have been studied extensively [26, 38, 45,
46, 47, 50, 57, 77]. A lot of contributions to forward displacement analysis (FDA) of different asymmetrical parallel
manipulators were made, such as a quadratic 3T1R PM by
Kong and Gosselin [46], third-class analytic 3-RPR PM by
Kong and Gosselin [45], and a special 2 degrees of freedom
(2-DOF) 5R spherical PM by Kong and Gosselin [47].
In more recent times, Gallardo-Alvarado et al. [26]
reported kinematics of one class of asymmetrical manipulators by means of screw theory; if a set of generalized
coordinates are given, the expression of kinematic equations
is represented in echelon form:
⎧
2 0
⎨ (S3 − S1 ) · (S3 − S1 ) − S13
2 0,
(10)
(S − S2 ) · (S3 − S2 ) − S23
⎩ 3
(S3 − B3 ) · (S3 − B3 ) − q32 0
where qi are generalized coordinates, S i are coordinates of
the points for i 1,2,3. Then a good solution of the FDA
is found. B3 is the coordinate of the points attached at the
moving platform.
Aerospace Systems
2.2 The existing problems and some suggestions
on kinematic analysis
2.2.1 The existing problems on kinematic analysis
Throughout the mentioned methods of kinematic analysis, comparison studies among different kinematic analysis
methods are shown in Table 1.
It is seen from Table 1 that kinematic mechanisms of
different SFMs are able to be found in different kinematic
analysis methods. For instance, Lee and Bejczy [50] reported
an inverse solution method using a group of joint parameter
equations, but this method cannot be directly applied to a limited joint angle case. Usually, kinematic analysis was focused
on some characteristics, such as position, direction, velocity, acceleration, and the corresponding high-order derivative
form, so some potential problems of kinematics are still open.
1.
The solution process of kinematics is more complicated
since kinematic analytic process of space flexible structures is difficult;
2. the analytic closed-loop solutions of transcendental equations are not easy to obtain since the computational
redundant problem of kinematics is challenged.
Table 1 Comparison analysis among different kinematic analysis methods
Analysis
methods
Advantages
Disadvantages
Applications
DKA
Equivalent
closed-form
solution
Analysis
difficultly,
transcendental
equations
Velocity and
acceleration
analyses
GAA
Did not
induce new
variables
Exaggerated
computation
consumptions
Kinematics
and
dynamics
analyses
GNCA
Unified
description
Limited on
GA theory
Suitable for
any system
in theory
FEA
Eigensensitivity
analysis
Decreased
precision of
modules
Space bionic
structures
Symmetry,
simplified
solution
Applied D–H
transformation
Space
adaptive
system
Asymmetry,
larger than
workspace
Limited on
PG theory
and GA
theory
Suitable for
dimensionally
confined
space
SGA
2.2.2 Some suggestions on kinematic analysis
Here, the prototype of a variable geometry structure of SFMs
is designed in Fig. 4. In fact, the kind of structure is equivalent
to a class of double Stewart platforms by Hesselroth and
Hennessey [28].
Inspired by these works of Williams II [72] and GallardoAlvarado et al. [26], it is seen from Fig. 4b that the structure
geometry relationship for an asymmetrical VGT platform
(A-VGTP) is analyzed by constructing some geometry auxiliaries. Also, using D–H parameter transformation by Jain
and Kramer [38] of coordinates in Cartesian space, the target position, position–direction and motion configurations
can be formulated within a vector-parameter expression on
a measurable vector space. See a similar report in Page et al.
[57]; space coordinates of the target vector can be expressed
as a group of equations:
X A2 +B32 +C2
,
(11)
n̄
n n̄
where A2 , B2 , and C 2 are three vertexes for the mobile platform. n̄ is the orientation vector. X and n are the position
center vector and the orientation vector of SFMs.
As for the mentioned solution problem of kinematic analysis process, we find transcendental equations of A-VGTP
are not easy to solve, but a fast eliminate solution process of
forward kinematics of A-VGTP in our published paper by
Xu et al.[77] is shown in Fig. 5.
Therefore, the main contributions of our proposed
approach are incarnated in two aspects:
1. The key transcendental equations are successfully formulated into compact polynomial ones using a group of
parameter transformation.
2. Compared with the screw approach by Gallardo
Alvarado et al. [26] with the complexity of O 11 × n 5 ,
our
proposed
approach with the complexity is O
8 × n 4 , so the computational efficiency of our approach
is increased by 16.27%.
2.3 The trends of research on kinematic analysis
Some potential trends of research on kinematic analysis are
summarized as follows:
1. Adaptive characteristics of structure addressed by Miura
and Furuya [55], which can make arbitrary configurations in three-dimensional plane. To describe structure
flexible deformation by means of adaptive characteristics, some structure characteristics of SFMs are adopted
such as co-existing in stiffness and flexibility, modularity
and mobility. To solve structure redundant problem of a
flexible multi-body system, FEA method is an effective
123
Aerospace Systems
Fig. 4 SFMs comprised of
asymmetrical variable geometry
structures by Xu et al. [77] (@
Copyright 2017 SAGE) with
a asymmetrical VGT platform
and b geometry analysis of
A-VGT platform
X2
C2
n
A2
Z2
X
Y2
B2
X1
A1
Z1
3
O1
Y1
C1
(a) A-VGTP
B1
(b) Geometry analysis of A-VGTP
optimal geometry planning. For examples, Gosselin and
Angeles [27] used an input–output mapping of velocity
transmission to study singularities of a Gough–Stewart Platform (GSP). Zlatanov et al. [86] extended this
approach to arbitrary non-redundant mechanisms.
Fig. 5 The fast eliminate solution analysis of forward kinematics
strategy to find groups of fewer equivalent parametric
macroelements.
2. To satisfy flexibility or stiffness of SFMs during executing space tasks for OOS, several new theories of
kinematics will be developed, such as point or line geometry theory and algebra geometry theory. For example,
screws of theory by Hong and Choi [29] or Grassmann–Cayley algebra (GCA) by Ben-Horin and Shoham [6]
can be used to analyze kinematics of different equivalent
Stewart platforms. Although kinematics of an n-DOF
(n is sufficiently large) flexible structure is not easy
to solve straightly, equivalent mechanism of kinematics
can be derived by constructing combination motion of
several of geometry groups by means of geometry algebra theory. In additional, some geometry methods based
on coordinate transformation in Cartesian coordinated
system are applied extensively.
3.
To find more kinematic extensive performance, the
application of kinematics of SFMs will be broadened,
such as Jacobian analysis [34], kinematic singularity,
123
According to the mentioned trends of research, we will
find kinematic analysis.
1. It lays the foundation of dynamic stable control.
2. It offers a powerful support of space assignment for
the long-distance effect, even in hostile surroundings by
Takayama and Hirose [67] or in dimensionally confined
space by Kakogawa and Ma [40] for the OOS.
3 Dynamic stable control of space flexible
manipulators
To the best of the authors’ knowledge, the main purpose of
dynamic feature analysis of SFMs is to delineate the corresponding deformation of flexible systems or to design system
stable controllers. Generally, two representative methods
with description of deformation are as follows:
Aerospace Systems
1. Characteristic representative: a series of tests (such as
bending moment test or tension test) are implemented to
detect dynamic characteristics of SFMs;
2. model-based representative: an equivalent rigid-body
dynamic model, such as a descending dimension method
by Zhang et al. [83] was considered to make the
whole flexible system translated into a combination
of slow time-varying sub-system and fast time-varying
sub-system. But the application of this approach has a
limitation of variable payloads of the end-effector.
Thus, if an equivalent stiffness of dynamics is found, the
description of system dynamic features can be expressed analytically.
3.1 Modeling of dynamics
To avoid computational efficiency problems of
flexibility–rigidity-coupled systems in a finite element
approach, Hu and Hong [30] borrowed the Hamilton principle to establish the key dynamic equations by giving a
complete quantitative relation with respect to an equivalent
stiffness of dynamics:
∂ T S M ∂U S M
d ∂ T SM
−
+
QSM ,
(12)
dt
∂ q̇
∂q
∂q
where T SM is the kinetic energy of the single flexible-link
manipulator with a moving base (SFLMB), U SM is the potential energy of the SFLMB, and QSM is the generalized force
vector corresponding to a generalized coordinate q.
To derive the closed-form dynamic equations of a SFM
with velocity constraints of the end-effector, the natural
orthogonal basis of the Jacobian matrix in a linear homogeneous form is obtained using Lagrange approach in an
independent generalized coordinate. Considering the physical meanings of nonlinear Euler–Bernoulli equation (Eq. 12),
a dynamic equation based on a discretized spring-massdamper model by Simo and Quoc [65] is established:
M(q)q̈ + F(q, q̇) + K q Bτ ,
(13)
where M is the mass matrix, F(q,q̄) represents the summation of the Coriolis, centrifugal and gravity forces, K is the
stiffness matrix, B is a constant matrix, and τ is a combination
of the torques of the link’s actuator.
However, different types of flexible constraints may be
with respect to different configurations; Vogtmann et al. [69]
presented a characteristic representative of the elastic joints
to increase control precision of dynamic error model of flexible systems. Briot and Khalil [9] used a symbol regression
law to investigate a dynamic modeling approach satisfying
Newton–Euler principle and then the global elastodynamic
model (GEM) of the virtual structure is addressed in the following form:
⎡
τt
⎣ 0n e
fp
⎤
q̈ s
TM J
t + ci j M q̈ t + c ,
⎦
J
M
p
t
t
i, j i j i j i j
ṫ p
ṫ p
cp
(14)
where τ t is the vector of the tree-structure input efforts, f p is
the platform reaction wrench, J ij is the Jacobian matrix, M ij
is the global Jacobian matrix, M p is the platform mass matrix,
qt is an assembled vector of passive and elastic variables, t p
is the platform velocity screw, and the other variables are
defined in Briot and Khalil [9]. It implies that the distributed
flexibility can be extended by taking effort to reduce the number of the symbol regression operator.
Model-based method in Rigatos [61] was robust for
all unknown parameters of dynamics. Applying nonlinear
Euler–Bernoulli equation (Eq. 12), a group of dynamic equations is expressed:
M 11 θ̈ + M 12 v̈ + F 1 (z, ż) T (t)
,
M 21 θ̈ + M 22 v̈ + F 2 (z, ż) + Dv̇ + K v 0
(15)
where unknown parameters defined in Eq. (15) are similar as
that of Eq. (13). If energy-based control of flexible-link robots
is considered, the torque of the ith motor (control output) can
be given by choosing a suitable PD-type controller. But the
whole system performance could not be evaluated accurately
due to nonlinear multiplier effects. On the other hand, some
negative effects of system performance in free-model-based
method were avoided, but system inverse dynamics could be
out of control due to inaccurate or non-equivalent description
of flexibility.
3.2 Control strategies of dynamic systems
Due to additive effects of flexible systems assembled by multiple adaptive model cells, the precision of system control is
difficult to be guaranteed. To gain a good robustness of a
flexible system, Rodriguez et al. [62] adopted a linearization
feedback control strategy to make flexible joints be equivalent to a linear rotating spring, but system control precision
was still not guaranteed. To overcome these drawbacks, some
main control approaches of flexible systems have been proposed, such as linear feedback control (LFC) [11, 25, 43],
nonlinear control (NC) [12, 15, 74], and adaptive control
(AC) [16, 68].
3.2.1 Linear feedback control method
To reduce vibration of a micro-damping flexible structure, a
linear input feedback control (LIFC) method was reported by
Kim et al. [43] in a comparison study of negative and posi-
123
Aerospace Systems
tive position feedback (PPF) control. If the output-dependent
integral sliding surface without any observers and extraperturbations is
ẋ(t) (A + DG(t)H )x(t) + B(u(t) + f (x, u, t)) + Ed(t)
,
y(t) C x(t)
TSMC surface during a finite time by implanting a differentiation–integration (DI) controller into a sign integral terminal
sliding function:
t
sign(e(τ ))dτ , s(0) 0 ,
(20)
s(t) e(t) + α
0
(16)
where x(t) is the state, u(t) is the control input, y(t) is the
output, f (x(t)) are nonlinear perturbations, d(t) is extra disturbances, system matrices (A, B, C, D, H, and E) are known
with G(t)G(t) ≤ I . To eliminate perturbations and nonlinear disturbances, Chang [11] used a dynamic output feedback
sliding mode control (DOF-SMC) strategy by Gadewadikar
et al. [25], taking advantage of SMC:
s(t) (C B)+ y(t) −
t
v(τ )dτ ,
where α > 0, and e(t) is defined as the tracking error.
Thus, a conclusion is given that convergence velocity of
DI-TSMC method is faster than traditional terminal sliding mode control (TSMC) method. Since system error was
defined as a residual signal that can be mapped into a matrix
null-space with linear measurement distribution, Wu and
Shi [74] suggested a sub-optimal adaptive variable structure
state estimation (AVS-SE) method to ensure all system errors
maintain an ultimate terminal boundary region.
(17)
0
3.2.3 Adaptive control method
where (CB)+ is a generalized inverse of CB, and the dynamic
output feedback controller is v(t) −F y(t).
3.2.2 Nonlinear control method
NC method includes several different types, such as shape
control, variable structure control, and SMC. Different nonlinear control strategies may be adopted for different control
conditions of nonlinear systems; SMC method, as one representative of NC methods, whose physical meaning is defined
as a dynamic behavior that non-continuous system signals are
forced to reach an equivalent stable sliding mode surface.
However, a single SMC method has been used rarely due
to the complexity of engineering applications. If a nonlinear control affine system with n-generalized coordinates and
m input variables was considered,
At special space surroundings, inertia of payloads of space
flexible manipulators is often beyond inertia of themselves.
It implies that manipulation and control of SFMs is very difficult since the control precision of position tracking of the
end-effectors may be reduced, especially for position drifting or unknown disturbances from the changes of payloads of
end-effectors. Damaren [16] introduced the concept of passivity to make dynamic systems of SFMs with the payload
changes of the end-effectors be global stable by adjusting
an adaptive control law. Ulrich et al. [68] gave a definition
of almost strict passivity to describe decentralized modified
simple adaptive control (DMSAC) techniques:
u K e (t)e y + K x (t)xm + K u (t)u m ,
(21)
for dynamic equations:
q̈ f (q, q̇, t) + B(q, t)u(t).
(18)
An adaptive SMC method was given by Zeinali and
Notash [82],
u(t) B̂ −1 q̈r − fˆ − K b sgn(S) ,
(19)
to eliminate structure vibration of robot manipulators without prior knowledge, where q is the vector of generalized
coordinates, the vector u(t) is the control input, and f (q,q̇,t)
is a bounded nonlinear vector function that represents the
nonlinear deriving terms. B(q,t) is an invertible and bounded
positive definite nonlinear function. K b is the bounds of
uncertainty vector. Chiu [15] introduced a labeled symbol
and decomposition technology to force system state trajectory to be tracked consistently to an equivalent stable
123
M(q)q̈ + C(q, q̇)q̇ − k(qm − q) 0
,
Jm q̈m + k(qm − q) τ
(22)
where K e is the time-varying stabilizing control gain matrix,
K x and K u are time-varying feed-forward control gain
matrices that contribute to maintaining the stability of the
controlled system, and the other parameters defined in (22)
are similar as Eq. (13).
However, adaptive control method is not suitable for
all control systems. For instance, some overstrike problems of AC method may bring some serious outcomes for
dynamic behaviors of flexible systems. In other words, velocity response is not decreased sharply, even if switch gain of
system controller becomes large enough due to initial tracking error.
Aerospace Systems
3.3 The existing problems and some suggestions
on dynamic stable control
3.3.1 The existing problems on dynamic stable control
1. The existing problems on modeling of dynamics
Here, if an equivalent mechanism of dynamic characteristics for a SFM is found, the description of system
dynamic features can be expressed analytically. Thus,
modeling problem of dynamics concentrates on the two
following aspects:
1. The control variables of the manipulator are strictly
less than the DOF of dynamic system.
2. Linear excitation of flexible parts cannot be separated
from nonlinear excitation.
In practice, an ideal dynamic model with some dynamic
feature constraints is difficult to gain since dynamic parameters of flexible systems are not easily determined.
2. The existing problems on dynamic stable control
Throughout the mentioned control strategies of SFMs,
comparison analysis of different control strategies is
shown in Table 2.
It is seen from Table 2 that there is not an optimal
strategy for all control systems with SFMs since each
control strategy has certain advantages with unexpected
disadvantages. In practice, some potential problems on
dynamic stable control are incarnated on two aspects as
follows:
1. Dynamic system of SFMs with coupling relation
between dynamic characteristics and controller is
a complicated and strongly coupled nonlinear one
by Hu and Hong [30]. But the research of dynamic
modeling approaches or dynamic stable control
approaches for such a complicated system is relative
rarely and not completed.
2. Space flexible manipulator is a complicated structure
with some properties such as high DOF and MIMO;
therefore, dynamic model of SFMs has uncertainties,
nonlinearities, or some strongly coupled features.
Table 2 Comparison study of three control strategies
Approaches
Advantages
Disadvantages
LFC
Non-conditional stability
Excessive frequency,
sensitive to noises
NC
SMC, conditional
stability
More DOF, large
computation
AC
Adaptive
Overstrike phenomenon
Moreover, we find that a single control method has been
adopted rarely. But to discover further system dynamic characteristics or to strengthen system performance, one control
method together with the other control methods to generate
a new assembled method is still open.
3.3.2 Some suggestions on dynamic stable control
1. Some suggestions on modeling of dynamics
Since the purpose of dynamic modeling is to choose the
function of forces or torques to act on its kinematic equations when some inertia of kinematics are differentiable,
in our published paper by Xu et al. [78], an equivalent description of inertia variables of flexible system
was given, and then a Lagrangian derivation process was
proposed to describe modeling of dynamics. If an independent variable is introduced by utilizing a generalized
coordinate parameter and Hamilton principle, a statespace representative of dynamic equation is obtained:
ẋ(t) A(x)x(t) + B(x)u(t) + E(x) f (x(t))
,
y(t) C(x)x(t)
(23)
where x(t) ∈ n is the state, u(t) ∈ n is the control
input, y(t) ∈ n is the output, and f (x(t)) ∈ n are
nonlinear perturbations due to the gravity and its strain
energy, and external disturbance of the flexible manipulator from the link’s flexibility. When the position of
the key joint or the actuator is detected to be measurable, system matrices (A(x), B(x), C(x), and E(x)) can be
dealt with in a local state-feedback linear parameterization approach by Lee and Bejczy [50] at operation point
x(t); a linearized expression of nonlinear system (23) is
considered:
⎧
⎨ ẋ(t) (A + A)x(t) + (B + B)u(t)
+ (E + E) f (x(t)) + Dw(t) ,
⎩
y(t) (C + C)x(t)
(24)
where w(t) ∈ r denotes a Gaussian whitenoise stochastic process, and uncertainty matrices
A, B, C, E are measurable approximately.
2. Some suggestions on dynamic stable control based
on observer
As is well known, dynamic system of SFMs is a class of
non-minimum phased one with time variation and uncertainty, which may bring about destruction seriously for
the designed controller by Wu et al. [73]. To keep high
velocity and good payload capacity for the end-effector
of SFMs, space tasks may be much heavy. It means that
the precision of kinematic displacement and the accurateness of dynamic control need to reach a higher level.
123
Aerospace Systems
Therefore, it is necessary to study dynamic stable control
problems of SFMs to strengthen system performance or
to improve system control precision.
Here, two observer-based control methods will be discussed by constructing suitable closed-loop mechanisms.
1. To overcome reduction of the precision of flexible
system (24) due to system transmission errors.
2. To maintain system performance of stability or
robustness against system nonlinearity or uncertainty.
1. Some suggestions on linear state observer-based control
A K1 , K 2 , G
d
A d , K 3 , K 4 , K5 , G
Hf
sup
w 0,2
DTf e jw H dT
AcfT
Z cfT
1
T
H ed
f
H
Fig. 6 General framework of NS-OBC for SFMs
In our proposed algorithm by Xu et al. [78], a linear state
observer-based control (LS-OBC) with rank-full by Wang
et al. [71] is considered:
˙ G x̂(t) + K y
x̂(t)
.
u(t) L r x(t)
With a linear state-observer1gain
K P2−1 Θ T R −1 + SUR− /2
,
G Â − K Ĉ
(25)
(26)
where the unknown parameters defined in the above equation
can be seen in Xu et al. [78]. As a result, asymptotical stability
(AS) of nonlinear system (24) is derived using Lyapunov
stability theory.
2. Some suggestions on nonlinear state observer-based control
Since all dynamic behaviors can be regarded as a combination
of motion assembled by all motions of each structure fundamental cells of SFMs, some error sources may be yielded due
to additive effect of structure flexibility. Therefore, dynamic
responses of flexible systems remain strong nonlinear characteristics in Yan [81], and then a new control strategy is chosen
by taking the place of a linear state observer that is inevitable.
Here, a nonlinear state observer-based control (NS-OBC) is
worthy to study further in a suitable closed-loop mechanism:
⎧
⎪
⎪
⎨
˙ (A + A)x̂(t) + (B + B)u(t)
x̂(t)
+ (E + E) f x̂(t) + G ∗ y(t) − ŷ(t)
.
⎪
u(t) K 1 x(t)
⎪
⎩
ŷ(t) (C + C)x̂(t)
(27)
(a) For a non-delay time case, a new closed-loop augment
system with NS-OBC (27) is proved to be AS in the
square mean, if AS algorithm is designed with nonlinear
state observer gain
123
⎧
1
κ /2 VaT∗ UaT∗ −κ I
⎪
⎪
K
⎪
2
⎪
BλT P2 +P1 Bλ
⎪
⎨
−1/2
1
T
VbT∗ UbT∗ − β − /2 ΘbT∗ ,
K
R
∗
1
b
⎪
⎪
⎪
⎪
1
⎪
⎩ G ∗ P2−1 ΘcT∗ − Uc∗ Vc∗ Rc/∗2 Rc−1
∗
(28)
where unknown parameters defined in the above equation are
similar as (26) seen in Xu et al. [78].
(b) For a delay time case, once a delay factor d is introduced
to the designed nonlinear state observer (27), then the
original system is transformed into a new singular augment system with time delay. Further, AS of the new
singular system is also derived using LMI technology.
Throughout the design process of two nonlinear observers,
a general framework of NS-OBC for SFMs is shown in Fig. 6.
3.3.3 Performance comparison study of two state OBC
methods
How to select a suitable closed-loop mechanism to describe
system dynamic characteristics is? A comparison study of the
two proposed observer-based control methods is discussed in
the following aspects.
1. Comparison of system control effect with two kinds of
state observers
To evaluate system dynamic performance of SFMs, two
observer-based control gains are compared with the same
physical conditions as described in Table 3.
Remark 1 It is seen from Table 3 that
Aerospace Systems
Table 3 Comparison of two observer-based control gains
Maximum eigenvalues
LS-OBC gain
NS-OBC gain
λmax (G)
λmax (K )
6.7106
6.8594
− 4.9616
− 1.4563
Fig. 7b, some similar conclusions with respect to Fig. 7a
can be obtained by analyzing H∞ robustness of system (24).
Thus, the delay time may destroy system stability and robustness.
3.4 The trends of research on dynamic stable control
1. from the standpoint of measurement gain, the change
of measurement estimation is not large in different state
OBC methods;
2. from the standpoint of state-feedback gain, the change of
state-feedback estimation is large in different state OBC
methods.
Therefore, the precision of system state estimation of NSOBC will be superior to LS-OBC case. It means that the
change of state observer from LS-OBC to NS-OBC is helpful
for eliminating system uncertainties, nonlinearities, and perturbations since some potential system performances (such
as stability and robustness) with NS-OBC of dynamic system
(24) are preformed sufficiently.
2. Comparison of state trajectories and H∞ robust performance in different state observers
To further illustrate the results of Remark 1, the change
of system state trajectories and the change of H∞ norm in
different state observers are displayed in Fig. 7, respectively.
Remark 2 From Fig. 7a, the fastest convergence speed is
NS-OBC for a transient case. Also, the second convergence
speed is LS-OBC for a transient case. The slowest convergence speed is NS-OBC for a delay case since the delay
effect of dynamic behavior is due to system flexibility. From
Some potential trends of research on dynamic stable control
are concluded.
1. An efficient and equivalent description of dynamic mechanism plays a significant role in modeling of dynamics.
Therefore, dynamic parameters can be obtained using
several neural networks or on-line learning machine.
Then a relative ideal dynamic model of SFMs may be
gained if some assumptions and flexible constraints are
addressed in a concise and reasonable way.
2. Synthesis of multiple conventional control methods or
development of a new unconventional control method
may be a good strategy. Control system of SFMs is
often attributed to a class of nonlinear, uncertain, and
non-minimum phased systems, so an optimal assembled
control strategy is a feasible path to solve such a class of
complicated systems.
3. The selection of control strategies may be limited by
dynamic environment and different requirements of
space tasks. In aerospace applications, the manipulation
and control of SFMs is usually complex and difficult to
be finished. But to study a large-scale system of SFMs,
a single control method is preferred to realize one-toone matched control for each sub-system. Also, for a
complex space-task assignment, a combination of multi-
Fig. 7 Comparison analysis of system performance of different state observers on two aspects: a state trajectories and b comparisons of H∞ norm
123
Aerospace Systems
ple control methods is preferred to excavate much more
dynamic characteristics.
4 Conclusion
In this article, a state-of-the-art review on kinematic analysis
and dynamic stable control of space flexible manipulators
(SFMs) is investigated. First, some open problems in the
field of kinematic analysis for SFMs are enumerated, and
then one new approach of kinematic analysis is suggested
in our published literature. Further, different dynamic stable
control methods of SFMs are concisely reviewed. Also, two
observer-based control methods on dynamic stable control
are proposed in our published literature. Several challenging problems on modeling of dynamics and dynamic stable
control for SFMs are enumerated. At last, some trends of
research on kinematic analysis and dynamic stable control
of SFMs are pointed out.
Acknowledgements This work was supported by the National Natural
Science Foundation of China (Grant nos. 61673262 and 61175028) and
Shanghai key project of basic research (Grant no. 16JC1401100).
References
1. Aghili F (2010) Cartesian control of space manipulators for onorbit servicing. In: Proceedings of AIAA guidance, navigation,
and control conference (AIAA, GNCC), Toronto, Canada, pp 2–5
2. Aguirrebeitia J, Angulo C, Macareno LM, Avilés R (2009) A
metamodeling technique for variable geometry trusses design
via equivalent parametric macroelements. ASME J Mech Design
131:104501
3. Bai S, Hansen MR, Andersen TO (2009) Modelling of a special class of spherical parallel manipulators with Euler parameters.
Robotica 27(2):161–170
4. Bandyopadhyay S, Ghosal A (2006) Geometric characterization
and parametric representation of the singularity manifold of a 6-6
Stewart platform manipulator. Mech Mach Theory 41:1377–1400
5. Baroon J, Ravani B (2010) Three-dimensional generalizations of
Reuleaux’s and Instant center methods based on line geometry.
ASME J Mech Robot 2:041011
6. Ben-Horin P, Shoham M (2009) Application of Grassmann-Cayley
algebra to geometrical interpretation of parallel robot singularities.
Int J Robot Res 28(1):127–141
7. Bilbao A, Avilés R, Aguirrebeitia J, Fernández de Bustos I (2009)
Eigensensitivity based optimal damper location in variable geometry trusses. AIAA J 47(3):576–591
8. Bilbao A, Avilés R, Aguirrebeitia J, Bustos IF (2011) Eigen
sensitivity analysis in variable geometry trusses. AIAA J
49(7):1555–1558
9. Briot S, Khalil W (2014) Recursive and symbolic calculation of
the elastodynamic model of flexible parallel robots. Int J Robot
Res 33(3):469–483
10. Carricato M (2013) Direct Geometrico-Static problem of underconstrained Cable-driven parallel robots with three cables. ASME
J Mech Robot 5:031008
123
11. Chang JL (2012) Dynamic output feedback integral sliding mode
control design for uncertain systems. Int J Robust and Nonlinear
22:841–857
12. Chaoui H, Gueaieb W, Yagoub M, Sicard P (2006) Hybrid neural fuzzy sliding mode control of flexible-joint manipulators with
unknown dynamics. In: Proceedings of IEEE conference on industrial electronics (IEC), pp 4082–4087
13. Chen N, Song S (1994) Direct position analysis of the 4-6 Stewart
platforms. ASME J Mech Design 116:61–66
14. Chen C, Jackson D (2011) Parameterization and evaluation of
robotic orientation workspace: a geometric treatment. IEEE Trans
Robot 27(4):656–663
15. Chiu CS (2012) Derivative and integral terminal sliding mode
control for a class of MIMO nonlinear systems. Automatica
48:316–326
16. Damaren CJ (1996) Adaptive control of flexible manipulators carrying large uncertain payloads. J Robotic Syst 13(4):219–228
17. Dasgupta B, Mruthyunjaya TS (2000) The Stewart platform manipulator: a review. Mech Mach Theory 35:15–40
18. Debus TJ, Dougherty SP (2009) Overview and performance of the
Front-end robotics enabling Near-term demonstration (FREND)
robotic arm. In: Proceedings of AIAA Infotech Aerospace Online
Conference (AIAA, IAOC), Reston, USA
19. Ding HF, Huang Z (2007) A unique representation of the kinematic
chain and the Atlas database. Mech Mach Theory 42(6):637–651
20. Ding HF, Zhao J, Huang Z (2009) Unified topological representation models of planar kinematic chains. ASME J Mech Design
131:114503
21. Eberharter JK, Ravani B (2006) Kinematic registration in 3D using
the 2D Reuleaux method. ASME J Mech Design 128:349–355
22. Friend R B (2008) Orbital express program summary and mission
overview. In: Proceedings of SPIE defense and security symposium
(SPIE, DSS), Orlando, pp 695–803
23. Fu ZT, Yang WY, Yang Z (2013) Solution of inverse kinematics
for 6R Robot manipulators with offset wrist based on geometric
algebra. ASME J Mech Robot 5:031010
24. Fukushima H, Satomura S, Kawai T, Tanaka M, Kamegawa T,
Matsuno F (2012) Modeling and control of a snake-like robot using
the screw-drive mechanism. IEEE Trans Robot 28(3):541–554
25. Gadewadikar J, Lewis FL, Abu KM (2006) Necessary and sufficient
conditions for H∞ static output feedback control. J Guid Control
Dyn 43:915–920
26. Gallardo-Alvarado J, Ramírez-Agundis A, Rojas-Garduño H,
Arroyo-Ramírez B (2010) Kinematics of an asymmetrical threelegged parallel manipulator by means of the screw theory. Mech
Mach Theory 45:1013–1023
27. Gosselin C, Angeles J (1990) Singularity analysis of closed-loop
kinematic chains. IEEE Trans Robotic Autom 6(3):281–290
28. Hesselroth AH, Hennessey MP (2014) Analytical evaluation of
the double Stewart platform tensile truss stiffness matrix. ASME J
Mech Robot 6:011003
29. Hong MB, Choi YJ (2011) Formulation of unique form of Screw
based Jacobian for lower mobility parallel manipulators. ASME J
Mech Robot 3:011002
30. Hu ZD, Hong JZ (1999) Dynamic modeling and analysis of a stiffness-to-flexibility structure. Appl Math Mech
20(10):1087–1093
31. Huang S, Natori MC, Miura K (1996) Motion control of freefloating variable geometry truss part 1: kinematics. J Guid Control
Dynam 19(4):756–763
32. Huang S, Natori MC, Miura K (1996) Motion control of freefloating variable geometry truss part 2: inverse kinematics. J Guid
Control Dynam 19(4):764–771
33. Huang XG, Liao QZ, Wei SM (2010) Closed-form forward kinematics for a symmetrical 6-6 Stewart platform using algebraic
elimination. Mech Mach Theory 45:327–334
Aerospace Systems
34. Huang T, Liu HT, Chetwynd DG (2011) Generalized Jacobian
analysis of lower mobility manipulators. Mech Mach Theory
46:831–844
35. Innocenti C, Parenti-Catelli V (1989) Direct position analysis of the
Stewart platform mechanism. Mech Mach Theory 26(6):611–621
36. Innocenti C (1995) Direct kinematics in analytical form of the 6-4
fully-parallel mechanism. ASME J Mech Design 117:89–95
37. Jafari F, McInroy JE (2003) Orthogonal Gough-Stewart platforms
for micromanipulation. IEEE Trans Robot Autom 19(4):595–603
38. Jain S, Kramer SN (1990) Forward and inverse kinematic solution
of variable geometry truss robot based on Ncelled tetrahedron truss.
ASME J Mech Design 112(1):16–22
39. Jing ZL, Qiao LF, Pan H, Yang YS, Chen WJ (2017) An overview
of the configuration and manipulation of soft robotics for on-orbit
servicing. Sci China Inf Sci 60:050201
40. Kakogawa A, Ma S (2010) Mobility of an in-pipe robot with screw
drive mechanism inside curved pipes. In: Proceedings of IEEE
international conference on robotics and biomimetics (RBC), pp
1530–1535
41. Kamegawa T, Yamasaki T, Igarashi H, Matsuno F (2004) Development of the snake-like rescue robot KOHGA. In: Proceedings of
IEEE international conference on robotics and automation (RAC),
pp. 5081-5086
42. Kiang CT, Spowage A, Yoong CK (2015) Review of control
and sensor system of flexible manipulator. J Intell Robot Syst
77:187–213
43. Kim SM, Wang S, Brennan MJ (2011) Comparison of negative
and positive position feedback control of a flexible structure. Smart
Mater Struct 20(1):015011
44. Kim HJ, Kim BK (2014) Online minimum-energy trajectory planning and control on a straight-line path for three-wheeled omnidirectional mobile robots. IEEE Trans Ind Electron 61(9):4771–4779
45. Kong X, Gosselin CM (2001) Forward displacement analysis of
Third-class analytic 3-RPR parallel manipulators. Mech Mach Theory 36(9):1009–1018
46. Kong X, Gosselin C M (2008) Forward displacement analysis of a
quadratic 3T1R parallel manipulator: the 4-DOF quadrupteron. In:
Proceedings of the second international workshop on fundamental
issues and future research directions for parallel mechanisms and
manipulators (FIFRD-PMM), Montpellier, France, pp 31–39
47. Kong X, Gosselin CM (2010) A formula that produces a unique
solution to the forward displacement analysis of a quadratic spherical parallel manipulator: the agile eye. ASME J Mech Robot
2:044051
48. Lan ZH, Du R (2008) Representation of topological changes in
metamorphic mechanisms with matrices of the same dimension.
ASME J Mech Design 130(7):074501
49. Larouche BP, Zhu GZH (2013) Investigation of impedance controller for autonomous on-orbit servicing robot. Can Aeronaut
Space J 59:15–24
50. Lee S, Bejczy AK (1991) A redundant arm kinematic control based
on parameterization. In: Proceedings of IEEE international conference on robotics and automation (RAC), Sacramento, USA, pp
458–465
51. Liu H, Huang T, Chetwynd DG (2011) A general approach for
geometric error modeling of lower mobility parallel manipulators.
ASME J Mech Robot 3:021013
52. Lin HT, Leisk GG, Trimmer BA (2013) Soft robots in space: a
perspective for soft robotics. Acta Futura 6:69–79
53. Long A, Richards M, Hastings DE (2007) On-orbit servicing: a new
value proposition for satellite design and operation. J Spacecraft
Rockets 44:964–976
54. Maciejewski AA, Klein CA (1985) Obstacle avoidance for kinematically redundant manipulators in dynamically varying environments. Int J Robot Res 4(3):109–117
55. Miura K, Furuya H (1988) Adaptive structure concept for future
space applications. AIM J 26(8):995–1002
56. Osuka K, Kitajima H (2003) Development of mobile inspection robot for rescue activities: MOIRA. In Proceedings of
IEEE/RSJ International conference on intelligent robotics and systems (IRSC), pp 3373–3377
57. Page A, de Rosario H, Mata V, Atienza C (2009) Experimental
analysis of rigid body motion: a vector method to determine finite
and infinitestimal displacements from point coordinates. ASME J
Mech Design 131:031005
58. Prada E, Gmiterko A, Lipták T, Miková Ľ, Menda F (2013) Kinematic analysis of planar Snake-like robot mechanism using of
matrices formulation. Am J Mech Eng 1(7):447–450
59. Qiao S, Liao Q, Wei S, Su HJ (2010) Inverse kinematic analysis
of the general 6R serial manipulators based on double quaternions.
Mech Mach Theory 45(2):193–199
60. Raghavan M, Roth B (1993) Inverse kinematics of the general
6R manipulator and related linkages. ASME J Mech Design
115(3):502–508
61. Rigatos GG (2009) Model-based and model-free control of
flexible-link robots: a comparison between representative methods. Appl Math Model 33:3906–3925
62. Rodriguez H, Astolfi A, Onega R (2004) On the construction of
static stabilizers and static output trackers for dynamically linearizable systems related results and applications. In: Proceedings of
IEEE conference on decision and control (DCC)
63. Rojas N, Thomas F (2013) Application of distance geometry to
tracing coupler curves of Pin-jointed linkages. ASME J Mech
Robot 5:021001
64. Sallaberger C, Force SPT, Agency CS (1997) Canadian space
robotic activities. Acta Astronaut 41:239–246
65. Simo JC, Quoc VL (1987) The role of nonlinear theories in
transient dynamic analysis of flexible structures. J Sound Vib
119(3):487–508
66. Sun FC, Wu FG, Liu HP (2008) Research prospect on faced to
on-orbit servicing remote-manipulation technologies. Syst Control
Technol Appl 34(1):33–37
67. Takayama T, Hirose S (2001) Development of ‘Souryu
I&II’—connected crawler vehicle for inspection of narrow and
winding space. ASME J Robot Mech 15(1):61–69
68. Ulrich S, Sasiadek JZ, Barkana I (2013) Nonlinear adaptive output
feedback control of Flexible-joint space robot manipulators. In:
Proceedings of AIAA guidance, navigation, and control conference
(GNCC), AIAA Paper 2013-4523-CP
69. Vogtmann DE, Gupta SK, Bergbreiter S (2013) Characterization
and modeling of elastomeric joints in miniature compliant mechanisms. ASME J Mech Robot 5:041017
70. Waldron KJ, Hunt KH (1991) Series-parallel dualities in actively
coordinated mechanisms. Int J Robot Res 10(5):473–480
71. Wang ZD, Zeng HQ, Ho DWC, Unbehauen H (2002) Multiobjective control of a four-link flexible manipulator: a robust H∞
approach. IEEE Trans Control Syst Technol 10(6):866–875
72. Williams II R L (1994) Kinematic modeling of a double octahedral
variable geometry truss (VGT) as an Extensible Gimbal. NASA
Technical Memorandum, p 109127
73. Wu DL, Li HY, Peng WB (2002) The stability analysis of
large space extensible structures on space station. Acta Astronaut
23(6):98–102
74. Wu HN, Shi P (2010) Adaptive variable structure state estimation
for uncertain systems with persistently bounded disturbances. Int
J Robust Nonlin 20:2003–2015
75. Xu WF, Liang B, Cheng L, Xu YS (2009) Autonomous target
capturing of free-floating space robot: theory and experiments.
Robotica 27(3):425–445
123
Aerospace Systems
76. Xu WF, Liang B, Cheng L, Xu YS (2010) Autonomous rendezvous
and robotic capturing of non-cooperative target in space. Robotica
28(5):705–718
77. Xu QM, Yang YS, Jing ZL, Hu SQ (2017) Forward kinematics
analysis for a class of asymmetrical parallel manipulators. Int J
Adv Robot Syst 14(1):1–12
78. Xu QM, Jing ZL, Hu SQ (2018) Stability analysis of nonlinear
dynamic system with linear observer for a multilink flexible manipulator. Int J Non-Linear Mech 103:27–36
79. Yahya S, Moghavvemi M, Mohamed HAF (2011) Geometrical
approach of planar hyper-redundant manipulators: inverse kinematics, path planning and workspace. Simul Model Pract Theory
19:406–422
80. Yamaguchi T, Kagawa Y, Hayashi I, Iwatsuki N, Morikawa K,
Nakamura K (1999) Screw principle microrobot passing steps
in a small pipe. In: Proceedings of international symposium
micromechatronics human sciences (SMHS), pp 149–152
81. Yan SZ (2004) Advanced in nonlinear dynamic problems on structural gaps for spacecraft. J Dyn Control Syst 2(2):48–52
82. Zeinali M, Notash L (2010) Adaptive sliding mode control with
uncertainty estimator for robot manipulators. Mech Mach Theory
45:80–90
123
View publication stats
83. Zhang L, Wang D, Dai JS (2008) Biological modeling and evolution based synthesis of metamorphic mechanisms. ASME J Mech
Design 130(7):072303
84. Zhang XD, Sun HX, Jia QX (2008) The research on control strategy
of space flexible robots. Dissertation Paper, Beijing University of
Posts and Telecommunications
85. Zhao JS, Chu FL, Feng ZJ (2014) Kinematics of spatial parallel manipulators with tetrahedron coordinates. IEEE Trans Robot
30(1):233–243
86. Zlatanov D, Fenton RG, Benhabib B (1998) Identification and
classification of the singular configurations of mechanisms. Mech
Mach Theory 33(6):743–760
87. Zsombor-Murray PJ, Hyder A (1992) Design, mobility analysis and
animation of a double equilateral tetrahedral mechanism. Robot
Auton Syst 9:227–236
88. Zsombor-Murray PJ, Gfrerrer A (2010) A unified approach to direct
kinematics of some reduced motion parallel manipulators. ASME
J Mech Robot 2:021006