ME1102 Engineering
Principles & Practice
WEEK-3 (Reading Material)
• Video files can be found in the following order:
EPP Week3 Slides with narration - Part1.mp4 (Vectors)
EPP Week3 Slides with narration - Part2.mp4 (Centre of Mass & Newton’s Law)
EPP Week3 Slides with narration - Part3.mp4 (FBDs & Static Equilibrium)
Outline
• Scalars and Vectors
• Centre of Mass
• Newton’s Law of Motion
• Free Body Diagram & Statics
Scalars and Vectors
Scalars and Vectors
• A scalar quantity has only magnitude.
• A vector quantity has both magnitude and direction.
Scalar quantities
Distance (m)
Speed (m/s)
Mass (kg)
Time (s)
Length, width, height (m)
Volume (m3)
Temperature (k)
Work (J)
Energy (J)
……
Vector quantities
Displacement (m)
Velocity (m/s)
Weight (N)
Force (N)
Acceleration (m/s2)
Impulse (Ns)
Moment (kgm/s)
……
Vectors
• To describe a vector quantity, one needs a coordinate system.
• Usually the “right-handed” Cartesian coordinate system XYZ is used.
z
O
Right-handed system
Y
x
• Following convention is used in this module:
Bold letter with an arrow on top to indicate a vector:
Magnitude or length of a vector : p (sometimes
Components of a vector: px, py, pz
)
Vector components in 2D
• x-component:
• y-component:
Y
py
• Magnitude (length):
• Direction:
O
θ
px
X
Vector components in 3D
• x-component:
• y-component:
• z-component:
pz Z
• Magnitude (length):
θ
• Direction:
O
px
𝒑
X
φ
py
Y
Unit vectors
• A unit vector is a vector with magnitude equal to one.
• A unit vector in the direction of an arbitrary vector is written:
• Three unit vectors defined by orthogonal components of the Cartesian coordinate
system are usually denoted as i, j, and k (as shown in the figure below, with i pointing
to the x-direction, j pointing to the y-direction, and k pointing to the z-direction, they
fulfil |i|=1, |j|=1, and |k|=1).
Z
p
• Any vector can be expressed in terms of i, j, and k :
z
= p x i + p y j + pz k
k
X-component
z-component
y-component
px
X
i
θ
O
φ
j
py
Y
Vectors
• A vector 𝒑 starts A(x0, y0, z0) ends B(x1,y1, z1) can be written as:
𝒑 = (x1-x0)i + (y1-y0) j + (z1-z0) k
• A vector 𝒑’ starts O(0, 0, 0) ends C(x1-x0, y1-y0, z1-z0) can be written as:
𝒑′ = (x1-x0)i + (y1-y0) j + (z1-z0) k
• Clearly, vector 𝒑 and vector 𝒑′ are equal: 𝒑 = 𝒑'
z
𝒑
k
(z1-z0)
𝒑’
j
(x1-x0)
i
O
C
(y1-y0)
x
• In fact, two vectors are equal as long as they have the same magnitude and direction.
y
Vector algebra - Summation
• Triangle rule: Put the second vector head to tail with the first and the resultant is the
vector sum. Example below: = +
𝒃
𝒄=𝒂+𝒃
𝒃
a
a
• Alternative, one can express each vector in terms of its components, for example:
= axi + ayj + azk and
Then, the summation is simply: =
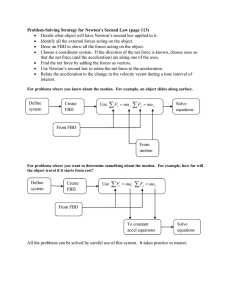
+
= bx i + b y j + bz k
= (ax+bx)i + (ay+by)j + (az+bz)k
Vector algebra - Subtraction
• Triangle rule again: =
-
=
+(- )
Step2 : apply
triangle rule
for summation
𝒃
𝒃
a
a
−𝒃
a
Step1 : flip
direction of 𝒃
-𝒃
𝒄=𝒂-𝒃
• Alternative, one can also express each vector in terms of its components, for example:
= axi + ayj + azk and
Then, the subtraction is simply: =
-
= b x i + by j + b z k
= (ax-bx)i + (ay-by)j + (az-bz)k
A taste of vector algebra
• Example: Find the tension in each cable (the system is stationary).
Express vectors using i, j, k:
Y
𝑫𝑨 = 9𝒊 + 12𝒋
B(-4,0,-6)
𝑫𝑩 = −4𝒊 + 12𝒋 − 6𝒌
𝑫𝑪 = −4𝒊 + 12𝒋 + 3𝒌
C(-4,0,3)
TB
130
KN
Z
TC
Express unit vectors in each direction:
A(9,0,0)
TA
D(0,-12,0)
X
𝒖
=
𝒖
=
𝒖
=
130 KN
9𝒊 + 12𝒋
3
4
= 𝒊+ 𝒋
5
5
9 + 12
𝒊
𝒋
𝒌
𝒊
𝒋
𝒌
=− 𝒊+ 𝒋− 𝒌
=−
𝒊+
𝒋+
𝒌
A taste of vector algebra
Express forces in each cable:
Y
B(-4,0,-6)
C(-4,0,3)
A(9,0,0)
TB
Z
TC
TA
D(0,-12,0)
X
𝑭
=𝑇 𝒖
=𝑇
𝑭
=𝑇 𝒖
=𝑇
𝑭
=𝑇 𝒖
=𝑇
3
4
𝒊+ 𝒋
5
5
2
6
3
− 𝒊+ 𝒋− 𝒌
7
7
7
4
12
3
− 𝒊+ 𝒋+ 𝒌
13
13
13
Express the weight of the box in terms of a vector:
𝑾 = −130𝒋
130 KN
𝑇
System in stationary: 𝑭
3
4
𝒊+ 𝒋 +𝑇
5
5
2
6
3
− 𝒊+ 𝒋− 𝒌 +𝑇
7
7
7
+𝑭
−
+𝑭
+𝑾=0
4
12
3
𝒊+ 𝒋+
𝒌 − 130𝒋 = 0
13
13
13
A taste of vector algebra
Y
B(-4,0,-6)
𝑇
C(-4,0,3)
TB
Z
TC
D(0,-12,0)
130 KN
3
2
4
𝑇 − 𝑇 − 𝑇
5
7
13
A(9,0,0)
TA
3
4
𝒊+ 𝒋 +𝑇
5
5
X
2
6
3
− 𝒊+ 𝒋− 𝒌 +𝑇
7
7
7
𝒊+
−
4
12
3
𝒊 + 𝒋 + 𝒌 − 130𝒋 = 0
13
13
13
4
6
12
3
3
𝑇 + 𝑇 + 𝑇 −130 𝒋 + − 𝑇 + 𝑇
5
7
13
7
13
Each component must be zero:
3
2
4
𝑇 − 𝑇 − 𝑇 =0
5
7
13
4
6
12
𝑇 + 𝑇 + 𝑇 −130 = 0
5
7
13
3
3
− 𝑇 + 𝑇 =0
7
13
𝑇 = 50 𝑘𝑁
Solve equations
to obtain:
𝑇 = 35 𝑘𝑁
𝑇 = 65 𝑘𝑁
𝒌=0
Vector algebra - Dot Product
• Definition: for two vectors
and , the dot product is defined as:
𝒃
θ
a
• Notice that the dot product takes two vectors and produces a scalar (i.e. number),
therefore dot product is sometime also known as the scalar product.
• It is easy to see that if two vectors
• It is also easy to see that:
and
are perpendicular, then
Vector algebra - Dot Product
• Properties of dot product:
(1) Commutative:
(2) Distributive:
(3) Positive definite:
In fact:
i.e. the length of a vector can be calculate with dot product:
(4) For unit vectors i, j, k
• Calculation of dot product using vector components:
𝒂 𝒃= 𝑎 𝒊+𝑎 𝒋+𝑎 𝒌
𝑏 𝒊+𝑏 𝒋+𝑏 𝒌 =𝑎 𝑏 +𝑎 𝑏 +𝑎 𝑏
Vectors algebra - Dot Product
• In mechanics, work done on a body by a force is a dot product of
force with displacement , i.e.
. Similarly, power is a dot
product of force with velocity, i.e.
.
𝑭
x
In the figure shown on the left, we know that the work done
by the force is a scalar, and its value (or magnitude) is defined
as: w = 𝐹𝑥 cos(𝜃), i.e. the force component in the direction
of displacement multiples the distance the object moved.
In a vector form, it is expressed as: 𝑤 = 𝑭 𝒙
𝐹 cos(𝜃)
Vectors algebra - Dot Product
• The applications of vector dot product is very broad. Examples include
calculation of the angle between two vectors and calculation of projection of
one vector onto another vector
• Example (Determine angle): Determine the angle θ in the figure below.
𝑨𝑩 = 0𝒊 − 7𝒋 + 10𝒌
𝑨𝑪 = 14𝒊 − 7𝒋 + 14𝒌
cos 𝜃 =
𝑨𝑩 𝑨𝑪
𝑨𝑩 𝑨𝑪
cos 𝜃 = 0.7373
θ = 42.5°
=
49 + 140
49 + 100 × 196 + 49 + 196
Vector algebra - Cross Product
• Definition: for two vectors 𝒂 and 𝒃, the cross product is defined as (Result is a vector):
𝒂 × 𝒃 = 𝒂 𝒃 sin 𝜃 𝒏
where 𝒏 is a unit vector in a direction perpendicular to both 𝒂 and 𝒃 , its direction determined by the
right-hand rule below.
Right-hand Rule
𝐴𝑟𝑒𝑎 = 𝒂 𝒃 sin 𝜃
Vector algebra - Cross Product
• Properties of cross product:
(1) Non-Commutative:
(in fact
)
(2) Distributive:
(3) Non-Associative:
(4) and are parallel:
(5) For i, j, k:
Note: think of
(i, j, k)
(j, k, i)
(k, i, j)
Cyclic permutation
Vector algebra - Cross Product
• Calculation of cross product using vector components:
𝒂×𝒃= 𝑎 𝒊+𝑎 𝒋+𝑎 𝒌 × 𝑏 𝒊+𝑏 𝒋+𝑏 𝒌
Using distributive property, as well as: 𝒊 × 𝒊 = 0,
𝒊 × 𝒋 = 𝒌, 𝒋 × 𝒊 = −𝒌, etc
𝒂×𝒃 = 𝑎 𝑏 −𝑎 𝑏 𝒊+ 𝑎 𝑏 −𝑎 𝑏 𝒋+ 𝑎 𝑏 −𝑎 𝑏 𝒌
• Above equation is much easier when we write in determinant form:
𝒊
𝒂×𝒃= 𝑎
𝑏
𝒋
𝑎
𝑏
𝒌
𝑎
𝑏
𝒊
𝑎
𝑏
𝒋
𝑎
𝑏
-
𝒌 𝒊
𝑎 𝑎
𝑏 𝑏
-
𝒋
𝑎
𝑏
+
+
+
Vector algebra - Cross Product
• Torque (or Moment) is the tendency of a force to cause an object to rotate about a pivot. It
is defined as force times perpendicular distance. By tradition, moment is typically used in
statics, and torque is typically used in dynamics (time dependent) applications.
Conceptually, they are the same.
In 3D:
In 2D:
Force
(Magnitude F)
Pivot O
𝝉=𝒓×𝑭
𝒓
θ
𝑭
θ
Torque Magnitude: Fdsin(θ)
Torque direction: Counter clockwise
Torque Magnitude: 𝒓 𝑭 sin 𝜃
Torque direction: Right-hand rule,
Perpendicular to both 𝒓 and 𝑭
• Torque (or Moment) is a vector and is defined by a cross product:
Vector algebra - Cross Product
• Example: The tension in the cable is 2 KN, determine the moment
about the based D due to the cable AB.
Z
Position vector: 𝑨𝑩 = 1𝒊 + 1𝒋 − 2𝒌
A (0, 2, 2)
𝒖
=
Force vector:
𝑭
=𝑇 𝒖
Y
D (0, 0, 0)
1𝒊 + 1𝒋 − 2𝒌
Unit vector AB:
1 +1 +2
= 0.41𝒊 + 0.41𝒋 − 0.82𝒌
= 2 0.41𝒊 + 0.41𝒋 − 0.82𝒌 [KN]
Position vector: 𝑫𝑨 = 0𝒊 + 2𝒋 + 2𝒌
Moment about D: 𝑴 = 𝑫𝑨 × 𝑭
X
B (1, 3, 0)
Vector algebra - Cross Product
• Example: The tension in the cable is 2 KN, determine the moment
about the based D due to the cable AB.
Z
A (0, 2, 2)
Moment about D: 𝑴 = 𝑫𝑨 × 𝑭
𝒊
= 0
0.82
𝒋
𝒌
2
2
0.82 −1.64
𝑴 = −4.92𝒊 + 1.64𝒋 − 1.64𝒌
Moment components:
D (0, 0, 0)
X
B (1, 3, 0)
𝑀
= −4.92 [KN. m]
𝑀
= 1.64 [KN. m]
𝑀
= −1.64 [KN. m]
Centre of Mass
https://en.wikipedia.org/wiki/Center_of_mass
Centre of Mass
• Consider the following problem. Two point masses (i.e. object has non-zero
mass yet its size is very small and can be ignored) having respectively the
masses of m1 and m2 are connected with a massless bar. Find the location
where you can place a pivot such that the bar is balanced.
y
x1
x2
m1
m2
x
m1g
m2g
The net moment about the pivot should be zero:
Hence:
If m1 = m2, then:
x
𝑥=
𝑥 +𝑥
2
𝑚 𝑔 𝑥−𝑥
𝑥=
=𝑚 𝑔 𝑥 −𝑥
𝑚 𝑥 +𝑚 𝑥
𝑚 +𝑚
Definition of
Centre of Mass
(i.e. mid point of the two masses)
Centre of Mass
• Generally, the Centre of Mass (CM ) for a set of discrete point masses
can be defined as:
For 2D:
m3
……
yCM
yN
yi
y3
Y
y2
y1
m1
x1 x3
mi
……
m2
=
∑ 𝑚𝑥
𝑚 𝑥 + 𝑚 𝑥 + ⋯+ 𝑚 𝑥
=
𝑚 + 𝑚 + ⋯𝑚
∑ 𝑚
𝑦
=
∑ 𝑚𝑦
𝑚 𝑦 + 𝑚 𝑦 + ⋯+ 𝑚 𝑦
=
𝑚 + 𝑚 + ⋯𝑚
∑ 𝑚
mN
CM(xCM,yCM)
x2 …… xi
𝑥
xN
For 3D:
∑ 𝑚𝑥
𝑚 𝑥 + 𝑚 𝑥 + ⋯+ 𝑚 𝑥
𝑥 =
=
𝑚 + 𝑚 + ⋯𝑚
∑ 𝑚
X
𝑦
=
∑ 𝑚𝑦
𝑚 𝑦 + 𝑚 𝑦 + ⋯+ 𝑚 𝑦
=
𝑚 + 𝑚 + ⋯𝑚
∑ 𝑚
𝑧
=
∑
𝑚 𝑧 + 𝑚 𝑧 + ⋯+ 𝑚 𝑧
=
𝑚 + 𝑚 + ⋯𝑚
∑
xCM
𝑚𝑧
𝑚
Centre of Mass
• Find the overall centre of mass for the two groups of point masses:
By definition, the overall centre of mass location (xCM, yCM), can be calculated with:
Y
Group-1 (a total of
N point masses)
mN
CM1(xCM1,yCM1)
m1
……
𝑥
MK
Mj CM2(x
=
∑
𝑚 𝑥 +∑
𝑀𝑥
𝑚 +∑
𝑀
∑
CM2,yCM2)
……
M3
M1
M2
mi
m2
Group-2 (a total
of K point mass)
X
Therefore: 𝑥
=
𝑀 𝑥
𝑀
Group-1 total mass: 𝑀
=
𝑚
Group-2 total mass: 𝑀
=
𝑀
xCM1
𝑀
𝑥
+𝑀 𝑥
+𝑀
=
×
∑
𝑚𝑥
𝑀
𝑀
and similarly:
+𝑀
×
∑
𝑀𝑥
𝑀
xCM2
+𝑀
𝑦
=
𝑀 𝑦
𝑀
+𝑀 𝑦
+𝑀
Centre of Mass
Y
Previous slide tells us that the overall centre of
mass is located at (xCM,yCM), where:
𝑥
𝑦
Y
𝑀 𝑥
𝑀
𝑀 𝑦
=
𝑀
=
Group-1 (a total of
N point masses)
mN
CM1(xCM1,yCM1)
m1
……
m2
Putting total
mass of Group-1
(MG1) here.
+𝑀 𝑥
+𝑀
+𝑀 𝑦
+𝑀
CM1(xCM1,yCM1)
MK
Mj CM2(x
CM2(xCM2,yCM2)
Overall CM
located at:
𝑥
=
𝑀 𝑥
𝑀
+𝑀 𝑥
+𝑀
𝑦
=
𝑀 𝑦
𝑀
+𝑀 𝑦
+𝑀
X
CM2,yCM2)
mi
Putting total
mass of Group-2
(MG2) here.
……
M3
M1
M2
Group-2 (a total
of K point mass)
X
In other words, if we know the locations of the
CMs for the two groups, we can put the total
mass of each group to its respective CM, and then
use a simple equation to estimate the location of
the overall centre of mass for the two groups.
Centre of Mass
• For simple rigid objects with uniform density, the centre of mass is located at the
centroid. For example for simple 2D shapes below:
Overall CM
located at:
Shape 1 with
mass m1
CM
CM
m1
CM1
CM2
Shape 2 with mass m2
𝑥=
𝑚 𝑥 +𝑚 𝑥
𝑚 +𝑚
𝑦=
𝑚 𝑦 +𝑚 𝑦
𝑚 +𝑚
m2
• A complex object may be represented as a collection of simple shapes, each
with uniform mass. We can then represent each component shape as a point
mass located at the centroid. The location of the centre of mass can then be
calculated using the equations for a set of discrete masses.
Centre of Mass
• CM Example: Find the centre of mass for the shaded shape shown below.
m1 = 24 u
Centroid (8,13)
m2 = 36 u
Centroid (4,7.5)
m3 = 12 u
Centroid (7.5,7)
m5 = -(1.5)2 u
Centroid (4.5,7.5)
m4 = 24 u
Centroid (8,2)
24 × 8 + 36 × 4 + 12 × 7.5 + 24 × 8 − 𝜋 × 1.5 × 4.5
24 + 36 + 12 + 24 − 𝜋 × 1.5
𝑥
=
𝑥
= 6.59
𝑦
=
𝑦
= 7.43
24 × 13 + 36 × 7.5 + 12 × 7 + 24 × 2 − 𝜋 × 1.5 × 7.5
24 + 36 + 12 + 24 − 𝜋 × 1.5
Centre of Mass
• Plumb Line Method for Centre of Mass: Suspend the object from two
locations and to drop plumb lines from the suspension points. The
intersection of the two lines is the centre of mass.
CM
Newton’s Law of Motion
https://en.wikipedia.org/wiki/Center_of_mass
Newton’s Law of Motion
• Newton's Laws of motion can be stated as:
First Law: Any object will remain in a state of rest or uniform motion in a straight line unless acted
upon by an external force.
Second Law: An object acted upon by an external force 𝑭 experiences an acceleration a that has same
direction as the force and a magnitude that is directly proportional to the force. Or, 𝑭 = 𝑚𝒂, where 𝑭
is the force (vector), 𝒂 is the acceleration (vector), and m is the mass of the object (scalar).
Third Law: The mutual forces of action and reaction between two objects are equal, opposite and
collinear. Or, 𝑭21 = - 𝑭12.
𝑭 12
1
𝑭21
2
𝑭21: force exerted by 2 on 1
𝑭12: force exerted by 1 on 2
Newton’s Law of Motion
• Consider the following problem:
An asteroid floating in space is initially stationary, at time t, it experiences
an external force at location A (maybe hit by a smaller asteroid), predict its
movement after t.
Prediction 1:
Pure translation
CM
A
CM: Centre of mass
𝑭
Prediction 2:
Translation &
rotation
But according to Newton’s
law of motion 𝑭 = 𝑚𝒂, it is
reasonable to conclude that
the asteroid should move
following the prediction 1.
From our experience, we
know that the asteroid
shall move following the
prediction 2.
Newton’s Law of Motion
• Newton's Laws of motion can be stated more precisely as :
First Law: Any particle will remain in a state of rest or uniform motion in a straight line unless acted
upon by an external force.
Second Law: A particle acted upon by an external force 𝑭 experiences an acceleration a that has same
direction as the force and a magnitude that is directly proportional to the force. Or, 𝑭 = 𝑚𝒂, where 𝑭
is the force (vector), 𝒂 is the acceleration (vector), and m is the mass of the object (scalar).
Third Law: The mutual forces of action and reaction between two particles are equal, opposite and
collinear. Or, 𝑭21 = - 𝑭12.
𝑭 12
1
𝑭21
2
𝑭21: force exerted by 2 on 1
𝑭12: force exerted by 1 on 2
Newton’s Law of Motion
• Any object (with extended size) can be considered as a collection of
particles, therefore, we will analyse Newton’s law for a collection of
particles:
𝑭 , 𝑭 , and 𝑭 are external forces
𝑭𝟏
1
𝑭21
2
𝑭12
𝑭𝟐
𝑭 ,𝑭 ,𝑭 ,𝑭
𝑭
etc. are internal forces, their fulfil Newton’s 3rd Law:
= −𝑭
𝑭
= −𝑭
𝑭
= −𝑭
𝑭32
𝑭31
𝑭23
𝑭13
3
𝑭𝟑
For each particle, we can apply Newton’s 2nd Law:
𝑭 +𝑭
+𝑭
= 𝑚 𝒓̈
𝑭 +𝑭
+𝑭
= 𝑚 𝒓̈
𝑭 +𝑭
+𝑭
= 𝑚 𝒓̈
Note: 𝒓̈ =
𝒓
=𝒂
Newton’s Law of Motion
• Newton’s law for a collection of particles:
𝑭𝟏
1
𝑭21
𝑭31
2
𝑭12
𝑭32
CM
𝑭𝟐
𝑭 +𝑭
+𝑭
= 𝑚 𝒓̈
𝑭 +𝑭
+𝑭
= 𝑚 𝒓̈
𝑭 +𝑭
+𝑭
= 𝑚 𝒓̈
Hence:
+𝑭
+𝑭 +𝑭 +𝑭 +𝑭 +𝑭
= 𝑚 𝒓̈ + 𝑚 𝒓̈ + 𝑚 𝒓̈
𝑭 + 𝑭 + 𝑭 = 𝑚 𝒓̈ + 𝑚 𝒓̈ + 𝑚 𝒓̈
𝑭23
𝑭13
𝑭 +𝑭
Define total mass M: 𝑀 = 𝑚 + 𝑚 + 𝑚
3
𝑭𝟑
𝑚 𝒓̈ + 𝑚 𝒓̈ + 𝑚 𝒓̈
𝑭 +𝑭 +𝑭 =𝑀
𝑀
Net external force
=𝑀
𝑑
𝑑𝑡
𝑚 𝒓 +𝑚 𝒓 +𝑚 𝒓
𝑀
Position of centre of mass
+𝑭
Newton’s Law of Motion
• Newton’s law for a collection of particles:
𝑭 +𝑭 +𝑭 =𝑀
𝑑
𝑑𝑡
Net external force
𝑭𝟏
1
𝑭21
2
𝑭12
𝑭32
𝑭31
𝑭23
𝑭13
3
𝑭𝟑
𝑭𝟐
𝑚 𝒓 +𝑚 𝒓 +𝑚 𝒓
𝑀
= 𝑀𝒂
Position of centre of mass
𝑭𝟏
2
CM
𝑭𝟐
1
𝑭𝟑
3
• The key result of this analysis is
that Newton’s law holds for any
rigid body provided it is applied to
the centre of mass!
𝑭
= 𝑀𝒂
Newton’s Law of Motion
• The utility of Newton's law for the description of the motion of extended objects
is the key to its general practical usefulness.
• The motion of any real object may be complex and involve rotations as well as
linear motions, but the motion of the CM follow exactly Newton's second law:
007 - Moonraker
Newton’s Law of Motion
• More examples: a pair of masses connected by a spring and launched
into a ballistic trajectory. Even with its complicated internal motion,
the centre of mass will still follow the same simple ballistic trajectory
like a simple particle.
Searching for planet X
CM
Source:
https://en.wikipedia.org/wiki/Center_of_mass
Free Body Diagram (FBD) & Statics
Free Body Diagram (FBD)
• FBD is a simple sketch of an isolated body, on which forces are
attached to the body as vectors or arrows.
• A suitable coordinate system (XYZ for 3D and XY for 2D) is then
chosen and the force vectors are resolved into their components
along the selected axes. This reduces the vector summation /
subtraction to simply scalar addition or subtraction of the vector
components along each axis.
• Newton’s law of motion is then be used to establish equations that
allow calculate the unknowns.
Statics: Rigid Body in Equilibrium (General 3D Case)
• An object is said to be in equilibrium if it experiences neither linear acceleration nor
angular acceleration. Therefore unless it is disturbed by external force or torque, it
will continue in that condition indefinitely.
• Examples of equilibrium: motionless & uniform motion in straight line.
• A rigid body is considered to be in equilibrium if, (1) the vector sum of all external
forces acting upon the body is zero, and (2) the vector sum of all external
moments/torques acting on the body equals zero.
O
𝑭𝟏
𝒓𝟏
𝑭=0
𝒓𝟐
𝒓𝑵
𝑭𝑵
𝑭𝟐
𝒓𝒊
𝑭𝒊
Conditions for an object in equilibrium (General 3D case):
Vector Form
Scalar Form
……
For an
arbitrary
point O
𝑴 =
𝒓 ×𝑭 =0
𝐹 =0
𝐹 =0
𝐹 =0
𝑀
𝑀
𝑀
=0
=0
=0
Statics: Rigid Body in Equilibrium (2D)
• If the external forces and movements (if any) of the object are all limited in a plane
(say xy plane, and sometimes the rigid body is also called planar rigid body), then
conditions for a 2D planar rigid body in equilibrium are reduced to three component
equations:
All 𝒓𝒊 and 𝑭𝒊 are in the
XY plane
Y
Z
.
X
O
𝑭𝟏
𝒓𝟏
𝒓𝟐
𝒓𝑵
𝑭𝑵
𝑭𝟐 For ∑ 𝑴 = ∑
𝒓𝒊
𝑭𝒊
For ∑ 𝑭 = 0 , we don’t
have to consider force
components on z-axis Fz.
……
𝒓 × 𝑭 = 0,
we don’t need to consider
moment/torque components
on x and y axes, i.e. Mox and
Moy, because there are no such
components.
Conditions for a 2D planar object in equilibrium:
𝐹 =0
Summation of all external force
components on x-axis is zero.
𝐹 =0
Summation of all external force
components on y-axis is zero.
𝑀
Summation of all z-components of the
moments about an arbitrary point O is
zero.
=0
Statics: Rigid Body in Equilibrium (2D)
• 2D planar rigid body in equilibrium continued :
Conditions for a 2D planar object in equilibrium:
Y
Y
Y
.
𝐹 =0
X
X
X
Z M.
Z
𝑭𝟏
O
𝑭𝑵
di
θ
𝑭𝟐
𝒓𝒊
𝑭𝒊
……
𝐹 =0
𝑀
=0
Let us further examine the z-component of the moment, take 𝒓 × 𝑭 for example.
As shown in the figure, since 𝒓 and 𝑭 both in the XY plane, the right-hand rule
indicates 𝒓 × 𝑭 is vector pointing to the –Z direction, and its magnitude is equal to
𝒓 𝑭 sin 𝜃 = 𝐹 𝑑 .
In other words, the magnitude of the moment on the object by 𝑭 with respect to
the point O is equal to the force times the perpendicular distance. And, the
direction of this moment points to –Z direction.
Since we only concern the object in 2D namely in XY plane, we can forget about the
Z-axis and denote the Moz to simply Mo. And we can define the sign of counter
clockwise moments “positive”, to preserve the consistency.
Therefore, ∑ 𝑀 = (−𝐹 𝑑 ) + (𝐹 𝑑 ) + ⋯ + (−𝐹 𝑑 ) + ⋯ + (−𝐹 𝑑 ) = 0 for the rigid body in the figure above.
Statics: Rigid Body in Equilibrium (2D)
• 2D planar rigid body in equilibrium continued:
Y
Conditions for a 2D planar object in equilibrium:
M
𝑭𝟏
X
d1 O
d2
𝑭𝑵
Summation of all external force components
on x-axis is zero.
𝐹 =0
Summation of all external force components
on y-axis is zero.
𝑀 =0
Summation of all moments about an arbitrary
point O is zero.
di
θ
𝑭𝟐
𝒓𝒊
𝑭𝒊
𝐹 =0
……
Free Body Diagram (FBD)
• Steps to solve FBD problems:
Step 1: Identify objects you will draw the FBDs (some problem requires you to draw
multiple FBDs)
Step 2: Identify all external forces acting on each object and draw them as vectors
Step 3: Establish a preferred coordinate system for each FBD (you don’t have to use a
single global coordinate system for all FBDs)
Step 4: Apply Newton’s law of motion, i.e. set the sum of the force components in
each axial direction as equal to the mass multiplied by the acceleration in that
direction.
Step 5: Solve the unknows.
Free Body Diagram
• Typical forces in a free body diagram
Force
Symbol
Direction
Weight
W
Downward
Normal force
N
Perpendicular to surface
Tension
T
Along string/rope/chain
Friction
f
Direction opposing relative motion
Frictional Force
• Types of frictional forces: Static friction & Kinetic friction
• Static friction: Occurs before the box starts to move. The direction of the frictional
force is opposite to the pushing force, and magnitude of the frictional force is equal
to the push force.
• If the pushing force continues to rise, eventually the box will starts to move. At the
point just before the box slips, the static frictional force reaches its maximum.
• This maximum static frictional force can be calculated:
normal force and is the static coefficient of friction.
N
, where N is the
Frictional Force
𝜇 𝑁
F
f
mg
𝜇 𝑁
Pushing Force
Frictional Force
• Types of frictional forces: Static friction & Kinetic friction
• Kinetic friction: As the box begins to slip, the type of friction changes from static
friction to kinetic friction. The direction of the kinetic friction is opposite to the
motion direction, and the magnitude of the kinetic friction is:
, where N is
the normal force and
is the kinetic coefficient of friction.
• Both static and kinetic coefficients of friction are dependent of the materials of the
box and ground. Typically,
N
Frictional Force Static friction
𝜇 𝑁
Kinetic friction
𝜇 𝑁
F
f
mg
𝜇 𝑁
Pushing Force
Free Body Diagram (FBD)
Example 1: Two wooden boxes m1 and m2 are stacked on a wooden floor as
shown in below. An external force pushes the box m1 and accelerates both the
two boxes. Determine the maximum magnitude of force F such that the two
boxes are not slip with each other. (The static and kinetic frictional coefficients
between two wooden surfaces are μs and μk, respectively)
m2
F
Wooden Floor
m1
Free Body Diagram (FBD)
Solution: Step 1 & 2
Draw FBDs & Identify
external forces
FBD of Box m1
FBD of Box m2
N
𝟏𝟐
Nfl
𝟐𝟏
fs
m2g
fs
𝟐𝟏
N
F
𝟏𝟐
kNfl
m1g
Note 1: N, f, m2g, …, these are scalars indicating the magnitudes of their respective forces. Any force, for
example 𝑵 (the normal force exerted by m1 on m2), is a vector and should be visualized as the arrow pointing
to the correct direction with its length or magnitude indicated beside it.
Note 2: The force 𝑵 and 𝑵 are a pair of action and reaction forces, so they are equal in magnitude, and
opposite in direction, or 𝑵 = −𝑵 by the Newton’s third law. Similarly, the static frictional force 𝒇 and
𝒇 are also a pair of action and reaction forces.
Free Body Diagram (FBD)
Solution: Step 1 & 2
Draw FBDs & Identify
external forces
FBD of Box m1
FBD of Box m2
a
N
fs
m2g
fs
Nfl
N
a
F
kNfl
mg
1
Note 3: If the two boxes do not slip, they have the same acceleration a.
Note 4: The only force on m2 that can generate the required acceleration is the static friction between box m1
and m2. Therefore, it should point to the same direction as the acceleration.
Note 5: The maximum value of the static friction between the two boxes is fs = sN. If this maximum static
friction can not match the required (m2a), then the two boxes slip with respective to each other. Hence, non-slip
condition is: sN m2a
Note 6: The box m1 is moving relative to floor, therefore the frictional force on m1 is the kinetic friction: fk = kNfl
Free Body Diagram (FBD)
FBD of Box m1
Solution: Step 3 & 4
Establish coordinate
system & write down
Newton’s law in terms
of axial components
y
fs
FBD of Box m2
y
fs
x
m1g
x component:
𝑓 =𝑚 𝑎
𝐹−𝑓 −𝜇 𝑁 =𝑚 𝑎
y component:
𝑁−𝑚 𝑔 =0
𝑁 −𝑚 𝑔−𝑁 =0
Non-slip condition:
𝑁 ≥ 𝑚 𝑎 or
𝑎≤
a
x
kNfl
m2g
Newton’s
Law
N
F
a
N
Nfl
𝑁
𝑚
Note 7: It is preferred to select motion direction as the positive axis direction.
Free Body Diagram (FBD)
Solution: Step 5
Solve unknows!
x component:
𝑓 =𝑚 𝑎
(1)
𝐹−𝑓 −𝜇 𝑁 =𝑚 𝑎
(3)
y component:
𝑁−𝑚 𝑔 =0
(2)
𝑁 −𝑚 𝑔−𝑁 =0
(4)
Non-slip condition:
𝑁 ≥𝑚 𝑎
Insert (2) to (4) and then insert (1) and (4) into (3):
Using non-slip condition:
Hence, we have:
𝑎≤
or
𝑎≤
𝑁
𝑚
𝐹 = 𝑚 +𝑚 𝑎+𝜇 𝑚 +𝑚 𝑔
𝑁 𝑚 𝑔
=
= 𝑔
𝑚
𝑚
𝐹 ≤𝜇 𝑚 +𝑚 𝑔+𝜇 𝑚 +𝑚 𝑔
Therefore, the max force we can push the boxes without worrying about slipping: 𝐹
=𝜇 𝑚 +𝑚 𝑔+𝜇 𝑚 +𝑚 𝑔
Free Body Diagram (FBD)
Alternative Solution:
FBD of Box m1
Nfl
N
fs
Use different FBDs
FBD of Box m2
N
fs
m2g
FBD of Stacked Boxes
Nfl
m2
F
F
kNfl
m1g
m1
kNfl
(m1+m2)g
Note 8: For FBD of stacked boxes, static friction and normal surface force pairs are now internal forces,
therefore they should not draw on the FBD.
Note 9: One can use the FBD of the stacked boxed to directly solve the problem.
Free Body Diagram (FBD)
Alternative Solution:
FBD of Stacked Boxes
y
Use different FBDs
Nfl
m2
a
F
m1
kNfl
Newton’s
Law
x
(m1+m2)g
x component:
𝐹 − 𝜇 𝑁 = (𝑚 +𝑚 )𝑎
y component:
𝑁 − (𝑚 +𝑚 )𝑔 = 0
Non-slip condition:
𝑁 ≥ 𝑚 𝑎 or
𝑎≤
𝑁
𝑚
Free Body Diagram (FBD)
Alternative Solution:
Use different FBDs
x component:
𝐹 − 𝜇 𝑁 = (𝑚 +𝑚 )𝑎
(1)
y component:
𝑁 − (𝑚 +𝑚 )𝑔 = 0
(2)
Non-slip condition:
𝑁 ≥ 𝑚 𝑎 or
𝑎≤
𝑁
𝑚
Insert (1) into (2):
𝐹 = 𝑚 +𝑚 𝑎+𝜇 𝑚 +𝑚 𝑔
Using non-slip condition:
𝑎≤
Hence, we have:
𝑁 𝑚 𝑔
=
= 𝑔
𝑚
𝑚
𝐹 ≤𝜇 𝑚 +𝑚 𝑔+𝜇 𝑚 +𝑚 𝑔
Free Body Diagram (FBD)
Take Home points:
• Selecting the correct object to represent by a FBD is an important
step, especially in more complicated situations.
• When drawing FBDs, draw external forces only.
• External forces on an object are due to causes that are external to the
object. (Examples: Weight)
• Internal forces are forces exerted by one part of the object on the
other part. These forces keep all the parts of an object together.
(Examples: Static friction in the above example when the stacked
boxes are considered as a whole, and bending moment in a beam)
Free Body Diagram (FBD)
• Example 2: As shown in the figure,
the trusses are massless, the pulleys
are massless, frictionless, and have
negligible radii. The string is
massless and unstretchable. The
whole system is motionless.
(g=10m/s2)
Find the reaction forces at the
support A.
Find the force in the truss AC.
String
A
Trusses
C
5m
5m
30
E
Pulley A
5m
D
Pulley B
5m
B
100 kg
Free Body Diagram (FBD)
Allow movement
along the xdirection as well
as rotation about
the pin.
No x & y
moments, no
rotation
Allow rotation
about the pin.
Rx
y
Rx
M
x
Ry
Ry
Roller Support
Pinned Support
Ry
Clamped Support
Note 1: The above diagrams shown the expected reactions from some commonly-used supports.
Free Body Diagram (FBD)
Solution: Step 1 & 2 Find the reaction forces at the support A.
Draw FBDs & Identify
external forces
Pinned support
A
RAx
RAy
C
5m
5m
30
T
E
5m
D
T
Pulley A
T
T
T
Pulley B
100 kg
5m
RBx
B
Roller support
mg
Note 2: Tension in a string is the same throughout the string.
Note 3: The whole system is motionless, therefore any of its part is also motionless. We can select suitable parts
of the system to draw FBDs to facilitate the solution.
Free Body Diagram (FBD)
Solution: Step 3 & 4
Establish coordinate
system & write down
Newton’s law in terms
of axial components
A
RAx
RAy
30
C
E
5m
5m
5m
D
5m
RBx
T
T
T
y
100 kg
x
y
M+
Pulley B
Pulley A
T
T
mg
x
B
∑𝐹 = 0 :
𝑅𝐴 + 𝑅𝐵 − 𝑇 cos 30° = 0
∑𝐹 = 0 :
𝑅𝐴 − 2𝑇 + 𝑇 sin 30° = 0
∑𝑀 = 0 :
𝑅𝐵
𝐴𝐵 − 𝑅𝐴
𝐴𝐸 = 0 Or, 𝑅𝐵
2𝑇 − 𝑚𝑔 = 0
5 − 𝑅𝐴
10 cos 30° = 0
Note 4: Both objects are motionless, meaning that they are in static equilibrium. In other words, ∑ 𝐹 = 0,
∑ 𝐹 = 0, and ∑ 𝑀 = 0, where O is an arbitrary reference point.
Free Body Diagram (FBD)
Solution: Step 5
Solve unknows!
∑𝐹 :
𝑅𝐴 + 𝑅𝐵 − 𝑇 cos 30° = 0
∑𝐹 :
𝑅𝐴 − 2𝑇 + 𝑇 sin 30° = 0
∑𝑀 :
𝑅𝐵
5 − 𝑅𝐴
Solution
Solving above equations results:
𝑅𝐴 = 750
𝑅𝐴 = −866
𝑅𝐵 = 1299
2𝑇 − 𝑚𝑔 = 0
𝑇 = 500 [N]
10 cos 30° = 0
866
RAx[N] A
[N]
[N]
RAy
C
5m
5m
5m
RBx
B
E
5m
D
[N]
30
T
T
Pulley A
T
Free Body Diagram (FBD)
Solution: Step 1 & 2 Find the force in truss AC.
Draw FBDs & Identify
external forces
A
RAx
RAy
C
5m
5m
5m
E
5m
D
RBx
30
T
T
Pulley A
T
FAC
C
FAD
FBD
30
T
E
5m
T
Pulley A
T
D
B
Note 5: Tension is assumed in the trusses AC, AD, and BD. If any of the forces FAC, FAD, and FBD is finally found to
be negative, then this just mean that the truss is experiencing compression instead of tension.
Free Body Diagram (FBD)
Solution: Step 3 & 4
FAC
Establish coordinate
system & write down
Newton’s law in terms
of axial components
FAD
30o
30o
FBD
30
C
T
E
5m
D
∑𝐹 = 0 :
−𝐹
−𝐹
∑𝐹 = 0 :
𝐹
sin 30° − 𝐹
∑𝑀 = 0 :
𝐹
5 sin 60° = 0
cos 30° − 𝐹
T
Pulley A
y
T
M+
x
cos 30° − 𝑇 cos 30° = 0
sin 30° − 2𝑇 + 𝑇 sin 30° = 0
{Note: there is a mistake in my video about this eq.}
Free Body Diagram (FBD)
Solution: Step 5
Solve unknows!
Solving above equations results:
∑𝐹 = 0 :
−𝐹
−𝐹
∑𝐹 = 0 :
𝐹
sin 30° − 𝐹
∑𝑀 = 0 :
𝐹
5 sin 60° = 0
𝐹
𝐹
𝐹
=0
cos 30° − 𝐹
[N]
Solution
sin 30° − 2𝑇 + 𝑇 sin 30° = 0
FAC
C
30
T
E
[N]
= −1500
= 866
cos 30° − 𝑇 cos 30° = 0
FAD
[N]
5m
D
1500
FBD [N]
Note 5: Truss AC is experiencing tension with a magnitude of 866 N.
T
Pulley A
T
Free Body Diagram (FBD)
Take Home points:
• If a system is in static equilibrium, then most likely any part of the
system is also in equilibrium. In this case, we can isolate suitable parts
of the system, draw their FBDs, and determine the internal forces.
• If a 2D rigid body is in static equilibrium, then
,
, and
, where O is an arbitrary reference point.
• When writing the equation for
, choosing a “good”
reference point O can simplify the equation a lot!
Free Body Diagram (FBD)
Example 3: As shown in below, the static and kinetic friction coefficients
between the box m and the slop are respectively μs and μk, the pulley is
frictionless, and the string is massless and unstretchable. (Assume M > m)
Determine acceleration.
Free Body Diagram (FBD)
Solution: Step 1 & 2
Draw FBDs & Identify
external forces
FBD of Box m
N
f = kN
mg
FBD of Box M
a
T
T
a
Mg
Note 1: Since the string is unstretchable, the magnitudes of acceleration for box m and box M are the same.
Note 2: Frictional force on the block m is a kinetic frictional force (relative motion), and direction is opposite to
the motion direction.
Note 3: Once again, it is reminded that the symbols in above FBDs denote magnitudes (or lengths), they are
scalars.
Free Body Diagram (FBD)
Solution: Step 3 & 4
Establish coordinate
system & write down
Newton’s law in terms
of axial components
FBD of Box M
FBD of Box m
y
N
y
a
T
T
x
a
f = kN
mg
Newton’s
Law
x
Mg
x component: 𝑇 cos(𝜃) − 𝑁 sin(𝜃) − 𝜇 𝑁 cos(𝜃) = 𝑚𝑎 cos(𝜃)
y component: 𝑁 cos(𝜃) + 𝑇 sin(𝜃) − 𝜇 𝑁 sin 𝜃 − 𝑚𝑔 = 𝑚𝑎 sin 𝜃
𝑇 − 𝑀𝑔 = −𝑀𝑎
Too complicated! You don’t have choose a global coordinate system for all
FBDs! Each FBD can have its own coordinate system.
Free Body Diagram (FBD)
Solution: Step 3 & 4
Establish coordinate
system & write down
Newton’s law in terms
of axial components
FBD of Box M
FBD of Box m
y
N
a
T
T
x
mgsin(θ)
f = kN
mg
a
y
Mg
mgcos(θ)
x
Newton’s
Law
x component:
𝑇 − 𝑚𝑔 sin(𝜃) − 𝜇 𝑁 = 𝑚𝑎
y component:
𝑁 − 𝑚𝑔 cos(𝜃) = 0
𝑀𝑔 − 𝑇 = 𝑀𝑎
Note 4: Each FBD can use its own most convenient coordinate system.
Note 5: It is preferred to select the motion direction as the positive axis direction.
Free Body Diagram (FBD)
Solution: Step 5
Solve unknows!
x component:
𝑇 − 𝑚𝑔 sin(𝜃) − 𝜇 𝑁 = 𝑚𝑎
(1)
y component:
𝑁 − 𝑚𝑔 cos(𝜃) = 0
(2)
Insert (2) and (3) into (1):
The acceleration is:
𝑀𝑔 − 𝑀𝑎 − 𝑚𝑔 sin(𝜃) − 𝜇 𝑚𝑔 cos(𝜃) = 𝑚𝑎
𝑎=
𝑀𝑔 − 𝑚𝑔 sin(𝜃) − 𝜇 𝑚𝑔 cos(𝜃)
𝑀+𝑚
𝑀𝑔 − 𝑇 = 𝑀𝑎
(3)
Free Body Diagram (FBD)
Take Home points:
• No need to select a global/common coordinate system for all FBDs, in
fact, each FBD can choose its own coordinate system to reduce the
complexity of Newton’s Equations.
• It is convenient to choose the positive direction of an axis pointing to
the direction of the motion.
The End