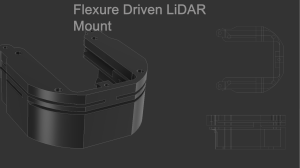
Through the week of this quarter, I had my work divided up between two teams: automation and server/processing. Before we can begin analyzing and processing our data, we needed to get it to read the data. The LiDar has the following microcontroller interface: Utilizing the Lidar’s simple I2C interface, we were able to begin reading the measurements through our Raspberry Pi. We found that it sends two points of data for every measured time interval. In addition to the distance measurement, the Lidar also records a ‘velocity’ measurement. This measurement is the difference between the last distance measurement and the current one. As of right now, we do not have any technical use for this second measurement. If possible, we could eliminate it to preserve processing power. Given that the data point is so miniscule, that may be unnecessary. According to the data sheet and observation of available data, the Lidar record with accuracy ±2.5cm for distances under 5 meters and ± 10cm for distances greater than that. For the next quarter, we will need to be converting data from polar to rectangular coordinates. The errors in the measurements may propagate through those calculations. We would need to make adjustments for those errors, probably through interpolation and averaging. To visualize data, we are choosing between MATPLOTLIB and another python based program. We would prefer one that would take in polar coordinates; this would save any errors exaggerated in in conversion calculations. In automation, we constructed the pivot-tilt rack. The tilting mechanism is motorized by our servo motor. A simple calibration is used to make sure that the angle in our program matches the actual angle of the Lidar mounted on our robot. It was simple to implement code to operate the servo – each a voltage is related to each angle. We decided that we need angles from about −20𝑜 to 90𝑜 . Our next step is to implement the pivoting motion using a stepper motor. We had put a pause on this process because the stepper motor we had purchased draws too much current and weight a bit too much. We may consider using a gear system to increase the resolution of our pivot. Right now, the stepper gives 400 steps for the 360𝑜 . With a 2:1 gear ratio, we may increase that up to 800 per full circle. This may be an important aspect for larger rooms.