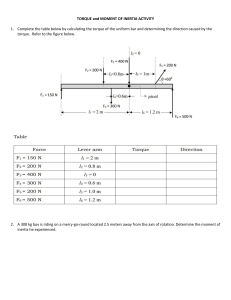
Home (/) Torque and Rotational Motion Tutorial What is Torque? Torque is a measure of how much a force acting on an object causes that object to rotate. The object rotates about an axis, which we will call the pivot point, and will label 'O'. We will call the force 'F'. The distance from the pivot point to the point where the force acts is called the moment arm, and is denoted by 'r'. Note that this distance, 'r', is also a vector, and points from the axis of rotation to the point where the force acts. (Refer to Figure 1 for a pictoral representation of these definitions.) Figure 1: Definitions Torque is defined as Γ = r × F = rFsin(θ). In other words, torque is the cross product between the distance vector (the distance from the pivot point to the point where force is applied) and the force vector, 'a' being the angle between r and F. − Cross Product Read Cookie Policy We use cookies on our site to provide you with the best user experience. OK Using the right hand rule, we can find the direction of the torque vector. If we put our fingers in the direction of r, and curl them to the direction of F, then the thumb points in the direction of the torque vector. − Right Hand Rule Imagine pushing a door to open it. The force of your push (F) causes the door to rotate about its hinges (the pivot point, O). How hard you need to push depends on the distance you are from the hinges (r) (and several other things, but let's ignore them now). The closer you are to the hinges (i.e. the smaller r is), the harder it is to push. This is what happens when you try to push open a door on the wrong side. The torque you created on the door is smaller than it would have been had you pushed the correct side (away from its hinges). Note that the force applied, F, and the moment arm, r, are independent of the object. Furthermore, a force applied at the pivot point will cause no torque since the moment arm would be zero (r = 0). Another way of expressing the above equation is that torque is the product of the magnitude of the force and the perpendicular distance from the force to the axis of rotation (i.e. the pivot point). Let the force acting on an object be broken up into its tangential (F tan) and radial (F rad) components (see Figure 2). (Note that the tangential component is perpendicular to the moment arm, while the radial component is parallel to the moment arm.) The radial component of the force has no contribution to the torque because it passes through the pivot point. So, it is only the tangential component of the force which affects torque (since it is perpendicular to the line between the point of action of the force and the pivot point). We use cookies on our site to provide you with the best user experience. Read Cookie Policy OK Pivot Point Figure 2: Tangential and radial components of force F There may be more than one force acting on an object, and each of these forces may act on different point on the object. Then, each force will cause a torque. The net torque is the sum of the individual torques. Rotational Equilibrium is analogous to translational equilibrium, where the sum of the forces are equal to zero. In rotational equilibrium, the sum of the torques is equal to zero. In other words, there is no net torque on the object. ∑τ = 0 Note that the SI units of torque is a Newton-metre, which is also a way of expressing a Joule (the unit for energy). However, torque is not energy. So, to avoid confusion, we will use the units N.m, and not J. The distinction arises because energy is a scalar quanitity, whereas torque is a vector. Here is a useful and interesting interactive activity on rotational equilibrium. Torque and Angular Acceleration In this section, we will develop the relationship between torque and angular acceleration. You will need to have a basic understanding of moments of inertia for this section. We use cookies on our site to provide you with the best user experience. − Moment of Inertia Read Cookie Policy OK Figure 3: Radial and Tangential Components of Force, two dimensions Imagine a force F acting on some object at a distance r from its axis of rotation. We can break up the force into tangential (F tan), radial (F rad) (see Figure 3). (This is assuming a two-dimensional scenario. For three dimensions -- a more realistic, but also more complicated situation -- we have three components of force: the tangential component F tan, the radial component F rad and the z-component F z. All components of force are mutually perpendicular, or normal.) From Newton's Second Law, F tan = ma tan However, we know that angular acceleration, α , and the tangential acceleration atan are related by: a tan = rα Then, F tan = mrα If we multiply both sides by r (the moment arm), the equation becomes F tanr = mr 2α Read Cookie Policy We use cookies on our site to provide you with the best user experience. OK Note that the radial component of the force goes through the axis of rotation, and so has no contribution to torque. The left hand side of the equation is torque. For a whole object, there may be many torques. So the sum of the torques is equal to the moment of inertia (of a particle mass, which is the assumption in this derivation), I = mr 2 multiplied by the angular acceleration, α. ∑τ = I ⋅ α We use cookies on our site to provide you with the best user experience. Read Cookie Policy OK Panel 4: Radial, Tangential and z-Components of Force, three dimensions If we make an analogy between translational and rotational motion, then this relation between torque and angular acceleration is analogous to the Newton's Second Law. Namely, taking torque to be analogous to We use cookies on our site to provide you with the best user experience. force, moment of inertia analogous to mass, and angular acceleration analogous to acceleration, then we Read Cookie Policy OK have an equation very much like the Second Law. Example Problem: The Swinging Door Question In a hurry to catch a cab, you rush through a frictionless swinging door and onto the sidewalk. The force you extered on the door was 50N, applied perpendicular to the plane of the door. The door is 1.0 m wide. Assuming that you pushed the door at its edge, what was the torque on the swinging door (taking the hinge as the pivot point)? Hints 1. Where is the pivot point? 2. What was the force applied? 3. How far from the pivot point was the force applied? 4. What was the angle between the door and the direction of force? − Solution Physics Tutorials Home (/outreach/physics-tutorials) Torque Self-Test The Right Hand Rule (/torque-self-test-right-hand-rule) Definition of Torque (/torque-self-test-definition-torque) Net Torque (/torque-self-test-net-torque) Angular Acceleration (/torque-self-test-angular-acceleration) Department Resources Course Outlines (//www.physics.uoguelph.ca/course-outlines) Physics Tutorials (//www.physics.uoguelph.ca/outreach/physics-tutorials) We use cookies on our site to provide you with the best user experience. Read Cookie Policy OK Machine Shop (//www.physics.uoguelph.ca/machine-shop) Machine Shop Requisition Form (//www.physics.uoguelph.ca/workshop-requisition-form) Poster Boards (//www.physics.uoguelph.ca/poster-boards) NMR Centre (https://www.uoguelph.ca/aac/facilities/nmr-centre) The Observatory is not available for public visits at this time. Administrative Links Campus Directory (https://www.uoguelph.ca/directory/) Gryph Mail (https://mail.uoguelph.ca) Physics Intranet (https://uoguelphca.sharepoint.com/sites/physics-intranet/) Employee Portal (https://hr.uoguelph.ca/EmployeePortal) Illness or Injury Incident Report (https://www.uoguelph.ca/hr/sites/uoguelph.ca.hr/files/public/Incident%20Report%20Form%202017.pdf) Undergraduate Calendar (https://www.uoguelph.ca/registrar/calendars/undergraduate/current/) Graduate Calendar (https://www.uoguelph.ca/registrar/calendars/graduate) CUPE 3913 (https://cupe3913.on.ca/) Contact Us Department Chair: Dr. Stefan Kycia (//www.physics.uoguelph.ca/people/stefan-kycia) Administrative Officer: Rachel Baker (mailto:physadmin@uoguelph.ca) IT Help: phys-it-help@uoguelph.ca (mailto:phys-it-help@uoguelph.ca) Other Inquiries: physinfo@uoguelph.ca (mailto:physinfo@uoguelph.ca) Department of Physics, Main Office MacNaughton Building, Room 207 1-519-824-4120 x 52261 Courier to: 488 Gordon Street Physics, Science Complex, Rm 1110 Guelph, ON | N1G 2W1 We use cookies on our site to provide you with the best user experience. Read Cookie Policy OK