Kwansoo Chung
Myoung-Gyu Lee
Basics of
Continuum
Plasticity
Basics of Continuum Plasticity
Kwansoo Chung Myoung-Gyu Lee
•
Basics of Continuum
Plasticity
123
Kwansoo Chung
Department of Materials Science
and Engineering
Seoul National University
Seoul
Korea (Republic of)
Myoung-Gyu Lee
Department of Materials Science
and Engineering
Seoul National University
Seoul
Korea (Republic of)
ISBN 978-981-10-8305-1
ISBN 978-981-10-8306-8
https://doi.org/10.1007/978-981-10-8306-8
(eBook)
Library of Congress Control Number: 2018932195
© Springer Nature Singapore Pte Ltd. 2018
This work is subject to copyright. All rights are reserved by the Publisher, whether the whole or part
of the material is concerned, specifically the rights of translation, reprinting, reuse of illustrations,
recitation, broadcasting, reproduction on microfilms or in any other physical way, and transmission
or information storage and retrieval, electronic adaptation, computer software, or by similar or dissimilar
methodology now known or hereafter developed.
The use of general descriptive names, registered names, trademarks, service marks, etc. in this
publication does not imply, even in the absence of a specific statement, that such names are exempt from
the relevant protective laws and regulations and therefore free for general use.
The publisher, the authors and the editors are safe to assume that the advice and information in this
book are believed to be true and accurate at the date of publication. Neither the publisher nor the
authors or the editors give a warranty, express or implied, with respect to the material contained herein or
for any errors or omissions that may have been made. The publisher remains neutral with regard to
jurisdictional claims in published maps and institutional affiliations.
Printed on acid-free paper
This Springer imprint is published by the registered company Springer Nature Singapore Pte Ltd.
part of Springer Nature
The registered company address is: 152 Beach Road, #21-01/04 Gateway East, Singapore 189721,
Singapore
Dedicated to my one and only life-time
partner, Meeyoung, and two life time
precious nuisances, Youn and Jean
—Kwansoo Chung
Foreword
The first time I studied the theory of plasticity goes back to 1997, when
Prof. Kwansoo Chung initiated a course on plasticity at the Department of Materials
Science and Engineering at the Seoul National University (SNU). The course soon
became known as one of the best courses in interdisciplinary studies in the college
of engineering. Since 2010, when I started teaching courses on plasticity, I have
wished for a good textbook which could be used by both undergraduate and
graduate students. A few years ago, I was very happy to learn that Prof. Chung was
planning to write such a book, and I quickly promised him my best assistance if he
ever needed it. In 2016, he showed me a draft of the book, which was mostly in
good shape. At the same time, though, along with everyone close to him, I was in
deep sorrow to know that he had been fighting a terminal cancer and wrapping up
his life’s duties before his death. Even in the last 3 months at a hospital,
Prof. Chung continued working on the book. He died on December 22, 2016.
What I have done was mostly to add completeness to his book, and my overall
effort is minimal compared with what it had taken Prof. Chung to write it.
Even though Prof. Chung was a fine gentleman and teacher in the Western
standards, the relationship between him and me was strongly traditional Korean, as
well. That is, he was like a loving, yet firm, parent to me. Prof. Chung was always
gentle and most generous with his time and energy for his students, although, being
his very first student who pursued a doctoral degree, I had received more attention
from him than others did. I am most saddened by having lost my lifetime teacher,
who also was one of the most distinguished scholars in the world of plasticity in
which I am in.
Seoul, Korea
Myoung-Gyu Lee
vii
Preface
The 1970s saw the first successful application of the numerical finite element
method (FEM) based on classical elasticity to structural analyses, and it was followed by major efforts to implement plasticity into FEM for metal forming analysis.
The first such efforts were based simply on rigid plasticity for two-dimensional
analysis. Soon thereafter, more advanced efforts followed based on elastoplasticity
static explicit/implicit as well as dynamic explicit formulations. In the 1980s, many
universities and laboratories at both private sectors and national levels were
working on plasticity methodologies and developing their own codes. Pursuing
greater accuracy, these efforts employed static implicit formulations.
However, the static implicit codes, while accurate, failed to provide useful
solutions to industrial forming applications due to its problematic, intrinsic
numerical divergence. At the same time, even though the dynamic explicit codes
could provide solutions, they were not as accurate as those of the static implicit
code. Additionally, the computation time was too long to be practical. Later, with
the advent of faster computers, such obstacles have become a non-issue and the
dynamic explicit code could be used by the industry. Commercial codes were
actively developed and marketed in the 1990s, equipped with various user-friendly
features. Today, there is hardly any code development at universities, with the
exception of a few special-purpose codes. Furthermore, commercial codes are used
everywhere, from industrial operations to university labs, where the dynamic
explicit code is mainly employed for industrial problems and the static implicit code
is used for academic purposes. One important, advantageous feature of most
of these commercial codes is that they provide subroutines, which allow users to
define their own material properties.
In spite of the popularity of plasticity FEM codes in the industry, an unfortunate
situation has existed that a considerable fraction of engineers engaged in using the
codes did not possess sufficient knowledge of plasticity theory required for proper
use of these codes. One key reason for this is the lack of dedicated courses on
plasticity in most colleges. Therefore, this book has been written with the purpose
of providing basic knowledge on plasticity to students and engineers who desire to
perform plasticity analyses in their professional lives. Whereas most of currently
ix
x
Preface
available books on plasticity analyses are intended for advanced professionals, the
present book will be useful to beginning students as well as to the more experienced
users. Those who study this book will be able to define and write their own
user-defined subroutines for commercial codes by the time they finish this book.
This book is intended to be self-sufficient such that readers can study it independently without taking another formal course. However, there are some prerequisites before taking on this book. Readers of this book are expected to have
completed a course on engineering mathematics as well as an introductory course
on solid mechanics, which are usually required during the sophomore year at most
engineering schools. In addition, readers are required to have taken a course on the
finite element method (on elasticity). Knowledge on continuum mechanics,
preferably nonlinear continuum mechanics, is highly desirable but self-study of the
basics will be sufficient. Finally, a solid understanding of elasticity at the graduate
level will be helpful, though not required.
This book may be used as a textbook for a one-semester course lasting 14 weeks
or longer. Generally, one chapter can be covered in a week, with the exception of
Chaps. 2 and 3, Chaps. 4 and 5, and Chaps. 7 and 8, for which each pair of chapters
can be covered in a week’s time. Homework problems have been designed to fortify
understanding, not to introduce new knowledge. Their answers are provided,
although often they may not be obvious and straightforward. While this book was
written for the beginner in mind, some of the topics and homework problems may at
first be difficult for some (for example, Chap. 17). In such cases, readers are
encouraged to revisit these topics and associated homework problems later after
establishing a firmer understanding of other chapters. Since my research experiences in plasticity have mainly been focused on sheet metal forming, two chapters
are specifically devoted to sheet metal forming applications, while the remainder
of the book covers plasticity more generally. Note also that much of the concepts
covered in the book apply mainly to metals at room temperature. An ideal way to
manage a class based on this textbook is to allocate one hour to a summary of the
chapter to be covered the following week. Students should then be allowed to
review the details independently outside of class and prepare questions for the next
session.
The contents of this book are based on my own study notes that have accumulated throughout my entire career. A considerable part of this book is based on
my own Ph.D. thesis and research publications. Exceptions to this are Chaps. 2–6,
which were based on the lecture notes of Prof. E. H. Lee’s class in 1981 at Stanford
University. Nevertheless, considerable changes have been made to the lecture notes
in preparing this book. Most of my knowledge of plasticity has been self-taught
through decades of research, and I must acknowledge that most of them were
performed in collaboration. I feel deeply thankful to all of my research collaborators, particularly my former graduate students at my materials mechanics lab, which
I started in the spring of 1996. All of my research works on plasticity were supported by various industrial companies and organizations, the project coordinators
of which I would like to acknowledge for their generous support: Owen Richmond
at Alcoa Technical Center, Chongmin Kim of General Motors, Oh-joon Kwon and
Preface
xi
Sung Ho Park, both of POSCO, and Rahul Verma of TATA. To have lead me to
pursue a path of a researcher/scholar, I owe a great deal to my previous academic
advisors, Prof. Sang-Yong Kim and Prof. E. H. Lee, as well as Prof. R. L. Mallett.
Finally, I am most thankful to the following individuals, without whose contributions this textbook would not have been completed. All the figures in this book
were created by Youngwoo Koh, Wonjae Kim, and Hyunki Kim, all my last
cohorts of students. Chung Youn reviewed this book for correctness in English.
Hongyu Wang was the first student to do his self-study with this book. Wonoh Lee,
Ji Hoon Kim, and Jeong Whan Yoon provided critical reviews of this book.
I wrote this book while concurrently undergoing multiple bouts of cancer
treatments. I would like to thank many of the faculty and staff at Seoul National
University Hospital, particularly Prof. Bhumsuk Keam, Prof. Eun-Jae Chung, and
Dr. Sang Youp Lee. With their care, I was given the time needed to complete the
writing of this book.
Seoul, Korea
Kwansoo Chung
Contents
Part I
One-dimensional Plasticity
1
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1 Overview of (Newtonian Continuum) Mechanics . .
1.2 Particle Mechanics for Deformable Body Dynamics
1.2.1 Rigid Body Dynamics . . . . . . . . . . . . . . . .
1.2.2 Deformable Body Statics . . . . . . . . . . . . . .
1.3 Continuum Mechanics . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3
3
5
10
15
19
2
Plasticity Characteristics (in Simple Tension/Compression)
2.1 Engineering Stress-Engineering Strain Data . . . . . . . . .
2.2 True Stress-True Strain Data . . . . . . . . . . . . . . . . . . . .
2.2.1 Simple Tension Data . . . . . . . . . . . . . . . . . . . .
2.2.2 Simple Compression Data . . . . . . . . . . . . . . . .
2.3 Viscoelasticity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
23
24
28
30
32
36
42
3
Instability in Simple Tension Test . . . . . . . . . . . . . . . . . .
3.1 Necking for Metals . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Neck Propagation for Polymers (Cold Drawing) . . . .
3.3 Strain-Rate Sensitivity Effect . . . . . . . . . . . . . . . . . .
3.4 Strain Localization and Fracture for Sheet Specimens
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
43
43
46
48
49
51
4
Physical Plasticity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 Theoretical Strength of Metals . . . . . . . . . . . . . . . . . . . .
4.1.1 Tensile (or Cleavage) Strength by Orowan (1949)
4.1.2 Shear Strength by Frenkel (1926) . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
53
53
53
54
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
xiii
xiv
Contents
4.2
Imperfections in Crystals . . . . . . . .
4.2.1 Point Defects . . . . . . . . . . .
4.2.2 Line Defects (Dislocations) .
4.2.3 Surface Defects . . . . . . . . .
References . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
55
56
56
58
62
5
Deformation of Heterogeneous Structures . . . . . . . . . . . . . . . . . . . .
5.1 Loading . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2 Unloading . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
63
66
68
6
Pure Bending and Beam Theory . . . . . .
6.1 Pure Bending (or Simple Bending)
6.1.1 Initial Bending . . . . . . . . . .
6.1.2 Reverse Bending . . . . . . . .
6.2 Beam Theory . . . . . . . . . . . . . . . .
6.3 Limit Analysis . . . . . . . . . . . . . . .
73
73
74
80
88
99
7
Torsion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
Part II
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Basics of Continuum Mechanics
8
Stress . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
9
Tensors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.1 Transformation Laws for Vectors and Tensors . . .
9.2 Eigenvectors and Eigenvalues in Linear Algebra . .
9.3 Principal Values and Principal Directions of Real
Symmetric Tensors . . . . . . . . . . . . . . . . . . . . . . .
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 131
. . . . . . . . . . 134
. . . . . . . . . . 139
. . . . . . . . . . 141
. . . . . . . . . . 152
10 Gradient, Divergence and Curl . . . . . . . . . . . . . . . . . . .
10.1 Gradient . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10.2 Divergence: Divergence Theorem, Heat Equation,
Work Rate and Virtual Work Principle . . . . . . . . . .
10.3 Curl: Potential Function in Line Integral and Linear
Elasticity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10.4 Curvilinear Coordinate System . . . . . . . . . . . . . . .
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 153
. . . . . . . . . 153
. . . . . . . . . 155
. . . . . . . . . 160
. . . . . . . . . 167
. . . . . . . . . 171
11 Kinematics and Strain . . . . . . . . . . . . . . . . . . . . . . . . . . .
11.1 Infinitesimal Strain Tensor . . . . . . . . . . . . . . . . . . . .
11.2 Tensors for Finite Deformation . . . . . . . . . . . . . . . .
11.3 Rate of Deformation Tensor and True Strain Tensor .
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
173
173
179
184
195
Contents
Part III
xv
Three-dimensional Plasticity
12 Yield
12.1
12.2
12.3
12.4
12.5
12.6
12.7
Function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Basic Features of the Yield Surface . . . . . . . . . . . . . .
Independence on Hydrostatic Stress: Incompressibility
Isotropy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
von Mises Isotropic Yield Function . . . . . . . . . . . . . .
Tresca Isotropic Yield Function . . . . . . . . . . . . . . . . .
Drucker Isotropic Yield Function . . . . . . . . . . . . . . . .
Non-quadratic Isotropic Yield Functions Generalized
from von Mises Yield Function . . . . . . . . . . . . . . . . .
12.8 Hill 1948 Quadratic Anisotropic Yield Function . . . . .
12.9 Drucker-Prager Compressible Isotropic Yield Function
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
13 Normality Rule for Plastic Deformation . . . . . . . . . . . . . .
13.1 Effective Plastic Strain Increment and Duality
in Normality Rule . . . . . . . . . . . . . . . . . . . . . . . . . . .
13.2 Incompressibility . . . . . . . . . . . . . . . . . . . . . . . . . . . .
13.3 Isotropy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
13.4 von Mises Isotropic Plastic Strain Increment Function .
13.5 Tresca Isotropic Plastic Strain Increment Function . . .
13.6 Non-quadratic Isotropic Plastic Strain Increment
Functions Generalized from von Mises Plastic Strain
Increment Function . . . . . . . . . . . . . . . . . . . . . . . . . .
13.7 Hill 1948 Effective Plastic Strain Increment . . . . . . . .
13.8 Drucker-Prager and Its Modified Compressible
and Isotropic Effective Plastic Strain Increment . . . . .
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14 Plane
14.1
14.2
14.3
14.4
14.5
14.6
Stress State for Sheets . . . . . . . . . . . . . . . . . .
von Mises Conjugate Set . . . . . . . . . . . . . . . . .
Tresca Conjugate Set . . . . . . . . . . . . . . . . . . .
Inverse Tresca Conjugate Set . . . . . . . . . . . . . .
Hosford and Inverse Hosford Sets . . . . . . . . . .
Hill 1948 Quadratic Anisotropic Conjugate Set .
Drucker-Prager and Its Modified Compressible
and Isotropic Conjugate Sets . . . . . . . . . . . . . .
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
15 Hardening Law for Evolution of Yield Surface .
15.1 Isotropic Hardening . . . . . . . . . . . . . . . . . .
15.2 Kinematic Hardening . . . . . . . . . . . . . . . .
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
199
199
203
205
207
211
215
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
222
228
228
230
. . . . . . . 231
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
232
235
239
241
243
. . . . . . . 246
. . . . . . . 249
. . . . . . . 250
. . . . . . . 253
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
255
262
266
267
268
270
. . . . . . . . . . . . 274
. . . . . . . . . . . . 286
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
287
291
291
296
xvi
Contents
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
297
297
302
305
306
309
314
.......
.......
.......
(1967) . .
.......
.......
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
315
317
322
324
335
339
16 Stress Update Formulation . . . . . . . . . . . . . .
16.1 Elasto-plasticity: Analytical Formulation
16.2 Elasto-plasticity: Numerical Formulation
16.3 Rigid-Plasticity: Analytic Formulation . .
16.4 Rigid-Plasticity: Numerical Formulation .
16.5 Finite Deformation Theory . . . . . . . . . .
References . . . . . . . . . . . . . . . . . . . . . . . . . . .
17 Formability and Sprinback of Sheets . .
17.1 Dorn Criterion (1947) . . . . . . . . . .
17.2 Hill Criterion (1952) . . . . . . . . . . .
17.3 M-K (Marciniak-Kuczynski) Model
17.4 Springback . . . . . . . . . . . . . . . . . .
References . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Appendix: Basics of Crystal Plasticity . . . . . . . . . . . . . . . . . . . . . . . . . . . . 341
Index . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 357
Part I
One-dimensional Plasticity
The main features of plasticity are covered utilizing one-dimensional constitutive
laws of plasticity for simplicity in Part I. In Part III, those one-dimensional laws are
extended to general three-dimensional laws based on basics of continuum
mechanics covered in Part II.
Chapter 1
Introduction
The following are foundational assumptions for continuum mechanics:
(1) Discrete scale versus Continuum scale
The real world is discrete in the atomistic scale: the discrete (atomistic) scale.
However, more often than not, our interest is not in detailed information on the
atomistic scale, but the average physical phenomenon resulting from behavior on
the atomistic scale. If then, details on the atomistic scale are simplified into an
averaged phenomenon, which is mainly handled mathematically (even ignoring the
very concept of atoms): the continuum scale. Therefore, in the continuum scale,
quantities are ‘averaged’, ‘mathematical’ and ‘phenomenological’.
(2) Newtonian mechanics
Continuum mechanics is generally based on Newtonian mechanics, which
fundamentally differs from the theory of relativity or quantum mechanics. The size
of an atom is known to be on the angstrom (Å) scale, which is one tenth of the nano
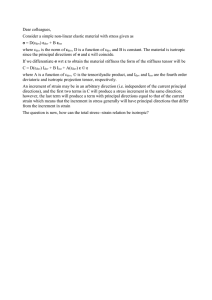
scale, 109 m: Refer to Fig. 1.1 to indirectly grasp the nano scale, by comparing the
effects of up-scaling and down-scaling the typical size of an object commonly
available in our daily life (here, a leaf).
1.1
Overview of (Newtonian Continuum) Mechanics
Continuum mechanics is the study of the relationship between external forces
applied to a continuum object as well as the reaction of the object as a result of
applied forces. Such reactions may include changes of shape and motion in terms of
translation and rotation. In order to grasp the main aspects of mechanics, a continuum object is simplified here as a particle or a set of particles, following a similar
procedure taken up in high school physics courses: particle mechanics.
© Springer Nature Singapore Pte Ltd. 2018
K. Chung and M.-G. Lee, Basics of Continuum Plasticity,
https://doi.org/10.1007/978-981-10-8306-8_1
3
4
1
Introduction
Fig. 1.1 a The vision of the earth b when a leaf is up-scaled by 109 , while c the atom size is the
downscale of it by 109
In continuum mechanics, a whole body is composed of elements, which have an
individual mass, shape and volume. In particle mechanics, a whole body is
assumed to be composed of particles, which have individual mass but no volume
nor shape, even though distances between particles are accounted for. Continuum
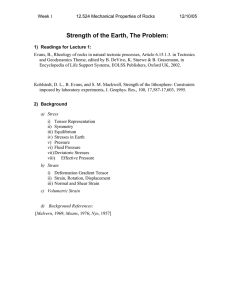
mechanics (therefore, particles mechanics also) is classified into the following three
categories for convenience as illustrated in Fig. 1.2:
Deformable body dynamics: the most general case of continuum mechanics, in
which all changes in shape and motion (translation/rotation) are accounted for. Such
a case is too complex and there are no separate courses for solids on this subject
except fluid dynamics and gas dynamics (in which thermodynamic laws/measures
are combined with mechanics). For solids, which are the main target of this book,
there are two extremes:
Fig. 1.2 Classification of continuum (or particle) mechanics
1.1 Overview of (Newtonian Continuum) Mechanics
5
i. (Rigid body) Dynamics: Here, change in motion is the main focus when
change in shape is minimal as is the case in high school and college physics
courses.
ii. (Deformable body) Statics: This focuses on change in shape with minimal
change in motion, and thus covers the topics of strength of materials, elasticity, viscoelasticity and plasticity (which is the subject of this book).
1.2
Particle Mechanics for Deformable Body Dynamics
Applying Newton’s (combined) first and second laws of motion for a single
particle leads to, as shown in Fig. 1.3,
X
d
d
Fi ¼ ma ¼ ðmvÞ ¼ p ¼ p_
dt
dt
ð1:1Þ
where Fi is the external force, a and v are the reactive acceleration and velocity,
respectively, while m is mass (or the translational inertia known as the measure of
resistance to the change in translational motion), p is linear momentum (here, the
expression ‘linear’ implies a ‘translational’ motion, as opposed to an ‘angular’ or
‘rotational’ motion) and t is time. Note that all discussions in this text are based on
the inertial (or ground) reference coordinate system.
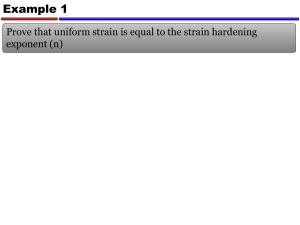
When the same law is applied for a set of particles, particularly a set of three
particles as shown in Fig. 1.4,
Fig. 1.3 A particle under
external forces
6
1
Introduction
Fig. 1.4 A set of three particles under external forces
F1 þ f 12 þ f 13 ¼m1 a1
F2 þ f 21 þ f 23 ¼m2 a2
ð1:2Þ
F3 þ f 31 þ f 32 ¼m3 a3
where, by Newton’s third law (the law of action and reaction),
f 12 ¼ f 21 ; f 13 ¼ f 31 ; f 23 ¼ f 32
ð1:3Þ
Here, f ij is the internal force exerted on the i-th particle by the j-th particle and
ri is the position vector. Now, there are six known quantities
(F1 ; F2 ; F3 ; m1 ; m2 ; m3 ) and nine unknowns (f 12 ; f 21 ; f 13 ; f 31 ; f 23 ; f 32 ; a1 ; a2 ; a3 )
with six equations.
Consequently, Newton’s laws alone do not provide enough information for
unique solutions in Newtonian mechanics in principle. Such a consequence is not
surprising, since it can be easily recognized that responses to external forces would
differ for different materials. This, therefore, further suggests that additional
equations (three more equations in this example), that would enable unique solutions, could be supplied from the description of material properties. It can be
concluded then that the subject of Newtonian mechanics is closely tied with those
of materials science and engineering.
In this simplified particle mechanics model, a whole body is composed of
multiple particles electrically bonded together. When each particle is assumed to
1.2 Particle Mechanics for Deformable Body Dynamics
7
represent an atom with positively charged protons at its nucleus surrounded by
negatively charged electrons, there is an electrical equilibrium state, which determines the relative distance between two neighboring particles as shown in Fig. 1.5.
Changing the relative distance and thereby disrupting the initial equilibrium state,
causes resistance to develop as internal (or inter-particle) force: a tensile force to
keep a farther distance and a compressive force for a shorter distance. The relationship between the change in relative distance and the internal force is a material
property, which can be exemplified with a simple linear law such as with spring
behavior (for a solid) or dash-pot behavior (for liquid). Electrical resistance from
changes in relative distance can be replaced by the resistance of a spring or a
dash-pot to deform. For the example shown in Fig. 1.4, there are three material
properties for three internal forces, completing the whole system of equations for a
unique set of solutions.
When energy is considered, Eq. (1.2) becomes
X Z
Fi dri
Z
ff 12 dðr2 r1 Þ þ f 23 dðr3 r2 Þ þ f 31 dðr1 r3 Þg
¼
þ
X mi jvi j2
2
ð1:4Þ
Fig. 1.5 Inter-atomic
distance in the electrical
equilibrium state
8
1
Introduction
Therefore, the total external energy provided to each particle by an external force
is utilized as the kinetic energy of each particle (the second term on the right hand
side) and the deformation energy (the first term of the right hand side) applied to
overcome the electrical resistance to changes in the relative distance of particles (or
the resistance of a spring or a dash-pot to deform).
2
m i vi HW #1.1
R
Show that mi ai dri ¼ 2
When material properties are not available, there are two ways to manipulate
Eq. (1.2) to develop two new equations by eliminating internal forces.
Manipulation I Summing all three in Eq. (1.2), considering Eq. (1.3), leads to
X
Fi ¼
X
ðmi ai Þ ¼
o d X X
d nX
ðmi vi Þ ¼
pi ¼
p_ i
dt
dt
ð1:5Þ
Now, referring to the values at the center of mass (MC), which are the
mass-weighted average values of all particles,
rmc
P
P
P
ð mi ri Þ
ð m i vi Þ
ð m i ai Þ
P
P
P
; vmc ¼
; amc ¼
¼
Mð mi Þ
Mð mi Þ
Mð mi Þ
Equation (1.5) becomes
X
Fi ¼ Mamc
ð1:6Þ
ð1:7Þ
Conclusion of the first manipulation: from the total external forces, the
(mass-weighted) average acceleration of all particles can be calculated, without
knowing any individual accelerations.
Manipulation II When the position vector of a fixed point (with respect to the
inertial reference coordinate system) is q and ~ri is the position vector of the i-th
particle from the fixed point as shown in Fig. 1.4,
ri ¼ ~ri þ q
ð1:8Þ
vi ¼ ~vi ; ai ¼ ~ai
ð1:9Þ
~r1 ðF1 þ f 12 þ f 13 Þ ¼~r1 m1 a1 ¼ ~r1 m1 ~
a1
~r2 ðF2 þ f 21 þ f 23 Þ ¼~r2 m2 a2 ¼ ~r2 m2 ~
a2
~r3 ðF3 þ f 31 þ f 32 Þ ¼~r3 m3 a3 ¼ ~r3 m3 ~
a3
ð1:10Þ
Therefore,
and
1.2 Particle Mechanics for Deformable Body Dynamics
9
while
~ri f ij þ ~rj f ji ¼ 0
ð1:11Þ
Consequently,
X
o X
X X
d nX
_i
aiÞ ¼
ðer i Fi Þ Mi ¼
ðer i mi e
ðer i mi e
H
viÞ ¼
dt
ð1:12Þ
where Mi is the moment and Hi is the angular momentum, since the contributions
by all internal forces are eliminated.
HW #1.2
Prove Eq. (1.11).
Note that Eq. (1.12) obtained for a fixed point is also valid for the center of
mass, which is not a fixed point in general; i.e.,
X
X mc nX mc
o d nX mc
o
er mc
er i mi e
er i mi e
Mi
a mc
¼
v mc
¼
i Fi
i
i
dt
X mc
_
¼
Hi
ð1:13Þ
Proof Consider q ¼ 0 in Fig. 1.4 and Eq. (1.8), then
X
X
~ri ¼ ri ¼ rmc þ ~rmc
vi ¼ vi ¼ vmc þ ~vmc
ðmi~rmc
ðmi ~
vmc
i ;
i Þ ¼0
i ; ~
i Þ ¼ 0;
ð1:14Þ
Now, Eq. (1.12) becomes
X
ðrmc þ ~rmc
i Þ Fi ¼
i
d hX
mc
~
ðrmc þ ~rmc
Þ
m
ðv
þ
v
Þ
i mc
i
i
dt
ð1:15Þ
Therefore,
rmc X
X
Fi þ
ð~rmc
i Fi Þ
h
i
X
X
X
X
d
rmc ð
mi Þvmc þ rmc ðmi ~
ðmi~rmc
ð~rmc
¼
vmc
vmc
i Þþ
i Þ
i Þ vmc þ
i mi ~
dt
ð1:16Þ
Since the first terms of the left and right sides are equal and the second and third
term of the right hand side vanishes, Eq. (1.13) is obtained from Eq. (1.16). Note
that the results obtained in Eqs. (1.7), (1.12) and (1.13) are generally valid,
regardless of material properties.
10
1
Introduction
EX #1.1
Here, Eq. (1.2) becomes
fðt) ¼ m1 a1 ðt) and Fðt) fðt) ¼ m2 a2 ðt)
where f is an internal force. There are two equations and three unknowns:
(f; a1 ; a2 ). Therefore, after the following spring behavior is assumed as the material
property, also generally called ‘the constitutive behavior’
f ¼ kðu1 u2 Þ
where k is the stiffness, ui is the displacement of the i-th particle, a set of two
simultaneous ordinary differential equations are obtained for two displacements:
f ¼ m1 a1 ¼ m1 €u1 or kðu1 u2 Þ ¼ m1 €
u1
Fkðu1 u2 Þ ¼ m2 u€2
For the solution scheme of this set of simultaneous ordinary differential equations, refer to any college level mathematics book.
We will now move on to discuss the two extreme cases of deformable body
dynamics, which are illustrated in Fig. 1.2.
(1) Rigid body dynamics—When deformation (by internal forces) is so small that it
may be disregarded and all ai ’s mainly contribute to the change in motion
(translation and rotation)
(2) Deformable body statics—When motions are negligibly small and all ai ’s
mainly contribute to deformation (by internal forces)
1.2.1
Rigid Body Dynamics
The material property of a rigid body is mathematically represented by the following Chasles’ theorem:
vi ¼ vR þ w ~rRi
ð1:17Þ
where vR is the velocity of the reference particle, w is the angular velocity of the
rigid body and ~rRi is the position vector of the i-th particle from the reference point.
Here, note that vR and w are commonly applied to all particles of the body and that
1.2 Particle Mechanics for Deformable Body Dynamics
11
the reference particle can be arbitrarily chosen. The first and second terms on the
right side of Eq. (1.17) account for translational and rotational effects, respectively.
EX #1.2
To better understand Eq. (1.17), compare the three cases here, which result in the
same velocity distribution, even though vR differs for each case. For simplicity,
consider the two-dimensional case with w ¼ ez . In this book, the rectangular
Cartesian coordinate system, which is denoted as x-y-z or 1-2-3 (for the indicial
notation), is extensively applied with unit base vectors, ex ð¼ e1 Þ, ey ð¼ e2 Þ and
ez ð¼ e3 Þ (Fig. 1.6).
Fig. 1.6 Illustration of Chasles’ theorem
12
1
Introduction
As shown in EX #1.2 for a simple case, the motion of a rigid body is the
summation of translation and rotation incurred by external forces, whose relationships are obtained by imposing Chasles’ theorem into Manipulation I and II [or
Eqs. (1.7) and (1.13)], respectively.
Translational law with force: Manipulation I When the center of mass is considered as a reference, Eq. (1.7) becomes
X
Fi ¼
o d hX
i
d nX
ðmi vi Þ ¼
mi ðvmc þ w ~rmc
i Þ
dt
dt
X
dX
ð1:18Þ
ðmi w ~rmc
¼ð
mi Þamc þ
i Þ
dt
X
X
d
w
mi~rmc
¼ð
mi Þamc þ
¼ Mamc
i
dt
Therefore,
X
Fi ¼ Mamc
ð1:19Þ
where M is the total mass as a measure of resistance to changes in translational
motion. Equation (1.19) is the extended version of Eq. (1.1) for a rigid body with
multiple particles. Note that Eqs. (1.7) and (1.19) look the same but they are
different in physics: amc in Eq. (1.7) is the mass-weighted average of various
accelerations of particles, which is valid regardless of material properties, while in
Eq. (1.19), amc is the value shared by all particles in the rigid body as exemplified in
EX #1.2.
Rotational law with moment: Manipulation II When the center of mass is a reference for a rigid body, ~vmc
rmc
i ¼ w~
i , considering Eq. (1.17), so that Eq. (1.13)
becomes
X
o d X
X
d nX
ð~rmc
½ f~rmc
ð~rmc
Mmc
rmc
¼
vmc
i Þ ¼
i
i Fi Þ i mi ~
i mi ðw ~
i Þg
dt
dt
d X
rmc
¼ ½ f~rmc
i w ðmi~
i Þg
dt
ð1:20Þ
When the two-dimensional case is considered for simplicity, in which all particles (including the center of mass) are on the same plane vertical to the axis of
rotation as shown in Fig. 1.7, Eq. (1.20) becomes
X
d X mc
d X
2
½ f~ri ðw mi~rmc
½ ðmi j~rmc
i Þg ¼
i j Þjwjez dt
dt
X
X
2 d
2
ðjwjez Þ ¼
¼
ðmi j~rmc
fmi j~rmc
i j Þ
i j ga ¼ Ia
dt
Mmc
i ¼
ð1:21Þ
1.2 Particle Mechanics for Deformable Body Dynamics
13
2
Fig. 1.7 Illustration of ~rmc
rmc
rmc
i mi ðw ~
i Þ ¼ ðmi j~
i j Þjwjez in the two-dimensional case
Here, the axis of rotation ez , which passes through the mass center, is parallel to
P
Mmc
i and a. In fact, Eq. (1.21) is generally valid even for a set of particles that
are three-dimensionally distributed as long as the axis of rotation is fixed; i.e.,
X
Mmc
i ¼ Ia
ð1:22Þ
where I is the rotational inertia or a measure of the resistance to change in
rotational motion. For such a case,
ZZZ
X
2
j
ð¼
r 2 qdV for a continuum bodyÞ
I¼
mi j~rmc
i
where j~rmc
i j (or r) is the distance from the axis of rotation, q is density and V is
volume. For the most general case, in which the axis of rotation is not fixed,
Eq. (1.20) is applied to obtain the angular acceleration with respect to the axis of
rotation, which passes through the center of mass.
For rigid body dynamics, all ai’s for a rigid motion are ultimately obtained from
Eqs. (1.19) and (1.20) or (1.22), which account for translation and rotation incurred
by external forces, respectively. Without any deformation, all energy provided to a
rigid body is transformed to kinematic energy as shown Eq. (1.4) for rigid body
dynamics.
As discussed, internal forces do not play a role in changing the motion of a rigid
body and can therefore be disregarded. However, the proper evaluation of internal
forces can be a major concern occasionally. One typical example is the fracture of a
rigid body such as a rock under impact, in which the rock may break when internal
forces reach a certain magnitude. As for the evaluation of internal forces, there are
two possible cases: dynamically determinate and dynamically indeterminate.
The case considered in Fig. 1.4 (as an example with three particles), if it is
applied to a rigid body, is ‘dynamically determinate’. For such a case, internal
forces are obtained from Newton’s laws, Eqs. (1.2) and (1.3) after all ai’s are
obtained from Eqs. (1.19) and (1.20) or (1.22), since there are six equations for six
internal forces.
14
1
Introduction
However, Fig. 1.4 is an exceptional case because the addition of one or several
more particles would cause the number of unknown internal forces to exceed the
number of equations Newton’s laws can provide. As such, dynamically indeterminate cases can be recognized as being more general than dynamically determinate
cases. Note however that internal forces of a dynamically indeterminate case cannot
be obtained under the rigid body dynamics formulation, in which the stiffness of the
material property is assumed to be infinitely large such that deformation vanishes.
For example, if spring behavior is assumed, f = k D‘, as the material’s property
for deformation, with f as the internal force, k as the stiffness and D‘ as the amount
of deformation, f becomes indefinite with k = 1 and D‘¼ 0 for a rigid body.
Therefore, internal forces for a rigid body can be found when solved as a
deformable dynamics problem with proper material properties, with the exception
of dynamically determinate cases.
It is important to include one last comment regarding a common trick for
evaluating the deformation of a body in deformable body dynamics, when deformation is infinitesimal without vibration. In such a case, the object may be assumed
to be a rigid body and then, if the case is dynamically determinate, internal force
and therefore deformation can be sequentially obtained after all ai’s are obtained
from the rigid body dynamics formulation. Examples of applying such a trick are
prevalent in textbooks as exercises.
EX #1.3
Two equations available from the Newton’s laws are
f ¼ m1 a1 ; F f ¼ m2 a2
For deformable body dynamics, there are two equations and three unknowns
(f; a1 ; a2 ) as discussed in EX #1.1. For a rigid body (or assuming a rigid body for a
deformable body with infinitesimal deformation), there are two equations for two
unknowns (f; a1 ¼ a2 ¼ amc ) and Eq. (1.19) becomes
F ¼ðm1 þ m2 Þamc ¼ ðm1 þ m2 Þa1 ¼ ðm1 þ m2 Þa2
F
a1 ¼ a2 ¼ amc ¼
m1 þ m2
1.2 Particle Mechanics for Deformable Body Dynamics
15
As for the internal force, this is a dynamically determinate case. For the 1st
particle,
f ¼ m 1 a1 ¼
m1 F
m1 þ m2
For the 2nd particle
F f ¼ m2 a 2 ¼
m2 F
m2 F
m1 F
; f ¼F
¼
m1 þ m2
m1 þ m2 m1 þ m2
And then using the trick, when a spring behavior is assumed for deformation,
a1 ¼ a2 ¼ amc ¼
F
m1 F
; f¼
¼ kðu1 u2 Þ ¼ kD‘
m1 þ m2
m1 þ m2
HW #1.3
Calculate the acceleration and the internal force for the following one-dimensional
case, for which the total mass is M with uniform mass density.
1.2.2
Deformable Body Statics
In addition to rigid body dynamics, another extreme includes deformable body
statics which deals with cases, in which the acceleration of each particle is so small
that it is assumed to vanish mathematically; i.e., Equation (1.2) now becomes
16
1
Introduction
F1 þ f 12 þ f 13 ¼ m1 a1 0
F2 þ f 21 þ f 23 ¼ m2 a2 0
F3 þ f 31 þ f 32 ¼ m3 a3 0
ð1:23Þ
Note that, for the deformation by internal force, particles are supposed to move so
that ai‘s are non-zero in a strict sense; however, ai‘s to move particles for deformation are so negligible in this extreme case (therefore, often called as
‘pseudo-static’), implying that particle movement for deformation is spontaneous in
a mathematical sense, not consuming any kinematic energy in Eq. (1.4).
Conditions for statics When procedures to derive Eqs. (1.7), (1.12) and (1.13) are
employed, the following two conditions are obtained for a whole body or any part
of a whole body as shown in Fig. 1.8:
F1 þ F2 þ f 13 þ f 23 ¼ 0
ð1:24Þ
M1 þ M2 þ M13 þ M23 ¼ 0
ð1:25Þ
and
Equation (1.25) is valid with respect to any fixed point including the center of
mass, which is virtually a fixed point in statics. Typically in statics problems, the
distribution of external forces is only partially described and then the two conditions for the whole body are often applied to complete external forces.
Fig. 1.8 Total or partial sum of forces and moments vanish for statics
1.2 Particle Mechanics for Deformable Body Dynamics
17
HW #1.4: Resultant force and resultant moment
(1) Consider an arbitrary distribution of forces as shown above, then the total sums
of forces and moments with respect to fixed points A and B are
FARES ¼
P
MARES ¼
FBRES ¼
Fi
P
P
Fi ¼ FARES
and
ðrAi Fi Þ
AB
MBRES ¼ MA
FARES
RES þ r
respectively. Now, prove that
AB
MBRES ¼ MA
FARES
RES þ r
and also that, when the total sum of forces vanishes, the total sum of moments
becomes equal regardless of the reference fixed point as happens in statics; i.e.,
A
B
If FA
RES ¼ 0; MRES ¼ MRES
(2) Now, consider two parallel forces with the same size and the opposite sign,
known as a couple.
Then, FRRES ¼ 0 regardless of the reference, while
MRRES ¼ r1 F r2 F ¼ ðr1 r2 Þ F ¼ r12 F ¼ ðd jFjÞen
18
1
Introduction
where en is a unit vector and d is the distance between two parallel F’s. Therefore,
the resultant moment of the couple is reference-insensitive because of its vanishing
resultant force. Consequently, it is convenient to replace the resultant moment with
a couple, even though a way to decompose the moment into the distance d and the
size of the force jFj is not unique. For example, when the resultant moment with
respect to a fixed point A MA
RES is replaced by a couple, the same previously derived
results are obtained as follows:
AB
FBRES ¼ FARES ; MBRES ¼ MA
FARES
RES þ r
Confirm this. Note that the couple does not affect the resultant force.
As for the solutions of Eq. (1.23) along with Eq. (1.3), the situation differs from
that of Eq. (1.2) for deformable body dynamics, since all ai ’s vanish here (therefore, no longer unknowns) and all internal forces are the only unknowns. The
situation is rather similar with that of rigid body dynamics, after all ai ’s are solved.
Therefore, two cases develop for deformable statics as does for rigid body
dynamics: statically determinate (SD) and statically indeterminate (SI) cases.
The case considered with Fig. 1.4 (as an example with three particles) is ‘statically determinate’. For such a case, internal forces are obtained from Newton’s
laws, Eq. (1.23) along with Eq. (1.3) as an exceptional case; therefore, internal
forces are independent of material properties. The deformation is sequentially
solved based on material properties after internal forces are obtained.
The statically indeterminate case can be considered to be the general case, for
which material properties imposed on internal forces are required, in addition to
Newton’s laws, Eqs. (1.23) and (1.3), for complete simultaneous solutions
regarding deformation as well as internal forces.
EX #1.4
For the following SD problem,
1.2 Particle Mechanics for Deformable Body Dynamics
19
f 1 ¼ f 2 ; f 2 ¼ f 3 ; f 3 ¼ F. Therefore, f 1 ¼ f 2 ¼ f 3 ¼ F
For change in shape (deformation), the spring behavior of a material property
may be applied, for example, as kD‘i¼1;2;3 ¼ F.
HW #1.5
For the following SI problem, Newtonian mechanics gives only three equations for
four internal forces. But, with material properties and kinematics, there are eight
equations and eight unknowns.
f 1 ¼ f 2 ; f 2 ¼ f 3 þ F; f 3 ¼ f 4
P Solve for f i¼1;2;3;4 and D‘i¼1;2;3;4 assuming that kD‘i¼1;2;3;4 ¼ f i¼1;2;3;4 and
D‘i¼1;2;3;4 ¼ 0.
1.3
Continuum Mechanics
Particle mechanics is employed in this chapter mainly to better understand the
basics of continuum mechanics while utilizing simpler mathematical formulations
since both particle and continuum mechanics qualitatively share the same basics.
However, quantitative details are somewhat different between the two. Quantitative
details of continuum mechanics are referred to Part II and the main aspect of
continuum mechanics is briefly reviewed here as a starting point to discuss plasticity (and understanding details is not required to read Part I).
In particle mechanics, an element of a whole body is a particle, which has only
mass without volume or shape. The translational movement of a particle and the
20
1
Introduction
change in relative distance between particles (therefore, one-dimensional in its
nature) account for the motion of each element and the deformation of the body,
respectively. In continuum mechanics, which is more sophisticated and therefore
more realistic, an element of a whole body not only has mass (dm: the differential
mass) but also volume (dV: the differential volume) and shape. The shape is typically considered to be a hexahedron whose six surfaces are aligned with the
rectangular Cartesian coordinate system as shown in Fig. 1.9. Therefore, the
translational and rotational motions as well as deformations are accounted for on
each individual element in continuum mechanics, and the internal force is a
three-dimensional surface force applied to each of the six surfaces of an element.
The internal force is further modified to the stress (as a force per unit area) measure
on each surface, which is then utilized to formulate the (rigid body) translational
and rotational motions as well as the deformation of an individual element.
The stress measure has eighteen components (three components for each surface
multiplied by six surfaces) but, after considering Newton’s third law (the law of
action and reaction), there are only nine independent components, which are often
stored in a three by three square matrix (mainly for convenience in handling the
transformation formulation associated with the rotation of the rectangular Cartesian
coordinate system).
When Newton’s laws are applied for the translational and rotational motions of
an element with rigid body dynamics, the following relationships are obtained,
Fig. 1.9 Elements of a continuum body in the rectangular Cartesian coordinate system
1.3 Continuum Mechanics
21
respectively (using the index and summation notation for the rectangular Cartesian
coordinate system):
rij;j þ qbi ¼ qai ¼ q€ui ¼ q_vi
for i; j ¼ 1; 2 and 3
ð1:26Þ
(in which the divergence of the first left term is with respect to the current
position vector x) and
rij ¼ rji
for i; j ¼ 1; 2 and 3
ð1:27Þ
where rij is the i-direction (Cauchy) stress tensor component on the surface facing
the j-direction, while ai, bi, vi and ui are the i-th direction components of acceleration, body force per unit mass, velocity and displacement, respectively, and q is
density. Here, 1, 2 and 3 refer to x, y and z directions, respectively. Note that
Eq. (1.26) is valid for deformable body dynamics and becomes
rij;j þ qbi ¼ qai 0 for i; j ¼ 1; 2 and 3
ð1:28Þ
for deformable body statics; however, Eq. (1.27) is valid for both. Consequently,
Eqs. (1.26)–(1.28) account for Newton’s laws for deformable body dynamics or
statics.
As for rigid body dynamics, since the main difference between particle
mechanics and continuum mechanics is the way to handle internal force, while the
internal force does not play any important role in dealing with the motion of a rigid
body, discussions on rigid body dynamics based on particle mechanics are applicable to continuum mechanics with mainly changing mathematical expressions
such as the summation into the integration, as demonstrated in the definition of the
RRR 2
P
2
rotation inertia, I ¼
mi j~rmc
r qdV for a continuum body).
i j ð¼
As for the deformation of a continuum body (either for dynamics and statics), the
stress measure is related to the deformation (or strain) measure, which accounts for
the changes in shape and size, as a material property (also known as the constitutive
law). Properly defining stress and strain measures for the constitutive law is
dependent on material properties and becomes a rather complex task especially if it
involves large deformation of a solid as will be discussed in Part II.
As an example, consider the linear elastic behavior for which deformation is
infinitesimal: the linear elastic or Hookean elastic solid. Then, the (symmetric)
strain measure becomes the infinitesimal strain tensor with its component,
1 @ui
@uj
1 @ui @uj
Eij ¼ ð
þ
Þ ð
þ
Þ for i; j ¼ 1; 2 and 3
2 @Xj @Xi
2 @xj
@xi
ð1:29Þ
where Xi and xi are the i-th component of the initial and current position vectors of a
material element, respectively, while the linear constitutive law is
22
1
rij ¼ Cijkl Ekl
for i, j, k and l ¼ 1; 2 and 3
Introduction
ð1:30Þ
with Cijkl as the elastic modulus tensor (consists of various elastic constants). The
modulus has only two independent elastic constants for an isotropic linear elastic
solid. Typical examples include Young’s modulus (or the modulus of elasticity as
a scalar value) E and Poisson’s ratio m. Now, there are 15 unknowns (for six
components of stress and strain measures and three displacement components) and
15 linear partial differential equations: Eqs. (1.29) and (1.30) either with Eq. (1.26)
for deformable body dynamics or with Eq. (1.28) for deformable body statics, after
Eq. (1.27) is applied.
When fluid dynamics is considered as an another example for the linear viscous
fluid or Newtonian viscous fluid, the proper value for deformation measure is the
rate of deformation tensor with its components,
1 @vi @vj
e_ ij ðor Dij Þ ¼ ð
þ
Þ
2 @xj @xi
for i, j ¼ 1; 2 and 3
ð1:31Þ
for i, j ¼ 1; 2 and 3
ð1:32Þ
while the linear constitutive laws are
rij ¼ pdij þ kDdij þ 2l e_ ij
Here, p is called the (static) pressure, Dð¼ e_ kk Þ is the rate of volume change per
unit volume and dij is the Kronecker delta, while k and l are two independent
material constants. Now, there are 15 unknowns (for six components of stress and
strain measures and three velocity components) and 15 linear partial differential
equations: Eqs. (1.26), (1.31) and (1.32), after Eq. (1.27) is applied
Solid mechanics as deformable body statics/dynamics deals with three typical
properties: elasticity, viscoelasticity and plasticity. Their constitutive laws are the
mathematical descriptions of those properties with proper descriptions of stress and
strain measures. Meanwhile, their Newton’s laws are commonly Eq. (1.27) paired
with Eq. (1.26) for dynamics or with Eq. (1.28) for statics. In this course on
plasticity, its constitutive laws will be discussed in Parts I and III. In Part II, there
will be derivations of Eqs. (1.26), (1.27) and (1.28) based on Newton’s laws as well
as discussions on various strain measures and kinematics including Eqs. (1.29) and
(1.31), along with the concept of tensors with their transformation laws, while
reviewing basics of continuum mechanics. Readers are encouraged to read Sect. 1.3
again after finishing Part II and before reading Part III.
Chapter 2
Plasticity Characteristics
(in Simple Tension/Compression)
As discussed in Chap. 1, material properties, or more specifically mechanical
properties, are required in addition to Newton’s laws to solve the deformation of
materials under external forces in continuum mechanics. However, mechanical
properties that address all the relationships between stress and strain measures under
various conditions are so diverse that measuring them, even only partially, remains as
one of the most challenging technical areas. It has fallen far behind the rapid
advancement of computational methods and awaits a major technical breakthrough.
The main obstacle in experiments seeking to measure mechanical properties of solids
is to properly introduce a significant amount of uniform deformation within a measurable area of a specimen during testing. Therefore, one-dimensional (or uni-axial)
simple tension tests at room temperature might be the singularly most common
experiment available to measure the mechanical property of solids. One-dimensional
properties measured using the simple tension test are extended to two- or
three-dimensional properties utilizing various simplifications and assumptions.
Figure 2.1 illustrates that a specimen undergoing the simple tension test with a
dog-bone shape has a uniform deformation range within the gauge length. In
contrast, deformation becomes non-uniform without the dog-bone shape because of
boundary constraints at the grip. Figure 2.1 includes views of the specimen having
a circular cross-section as a bulk sample and a flat sheet cross-section as a sheet
sample. The specimen is cut from a larger sample, while still keeping the properties
of the original sample intact as much as possible. There are standard procedures
which specify the shape and dimensions of bulk and sheet sample specimens. Note
that sheet and bulk samples having the same chemical compositions are expected to
have different material properties, since they would have different microstructures
as a result of being subjected to different processes to reach their final bulk or sheet
shapes.
© Springer Nature Singapore Pte Ltd. 2018
K. Chung and M.-G. Lee, Basics of Continuum Plasticity,
https://doi.org/10.1007/978-981-10-8306-8_2
23
24
2 Plasticity Characteristics (in Simple Tension/Compression)
Fig. 2.1 Non-uniform
deformation of a specimen
without a dog-bone shape and
uniform deformation with a
dog-bone shape during a
simple tension test
Sheet specimen
2.1
Bulk specimen
Engineering Stress-Engineering Strain Data
Figure 2.2 shows data customarily measured during simple tension tests for metals
at room temperature: applied force F and deformation (or the change in length) of
the gauge length of the specimen D‘. Since the stress measure needed is the force
per unit area, force F is divided by the initial cross-sectional area (from the middle
of the specimen) to obtain the engineering stress (or the nominal stress).
Meanwhile, change in length is divided by the initial gauge length to obtain the
engineering strain (or nominal strain).
There are two important measurements in the data related to plasticity: the yield
stress as the limit of the elastic deformation range and the ultimate tensile strength
(UTS) as the maximum engineering stress, which also indicates the limit of the
uniform deformation range within the gauge length, as will be further discussed
later.
2.1 Engineering Stress-Engineering Strain Data
25
Fig. 2.2 Engineering stress-engineering strain data customarily measured for metals at room
temperature with a simple tension test
Metals at room temperature generally form crystal structures, in which all atoms
are positioned at electrical equilibrium sites (at Point A in Fig. 2.2). When an
external force is applied, internal force and deformation (changes in inter-atomic
distances) develop. Note that, if an external force is not large enough (at Point B),
deformation vanishes as soon as the external force is removed and atoms return to
their initial positions: elastic behavior without any damage on the micro-structural
scale. When an external force is large enough (at Point D), some atoms in the
specimen deform too much (or move too far from their initial equilibrium sites) that
they are unable to recover and resume their initial positions when the external force
is removed. Instead, upon removal of the external force, atoms take up new equilibrium sites within a new arrangement of neighboring atom, thus incurring permanent deformation (at Point E): plastic behavior with damage on the
micro-structural scale. The amount of stress beyond which plastic behavior
occurs is the yield stress (at Point C). The shaded area surrounded by Points A, B,
C, D and E more or less represents the energy per unit volume externally provided,
which is mostly dissipated as heat. Plastic behavior, in which atoms move to new
equilibrium sites, occurs mainly by shear force, whose main features will be further
discussed briefly in Chap. 4.
In the case of elastic behavior, for which the measured figure is approximately
linear, the slope of the stress with respect to the strain is Young’s modulus E, while
the ratio of the cross-sectional shrinkage strain with respect to the measured tensile
strain at the gauge length (with the multiplication of a minus sign to make the ratio
a positive value) is Poisson’s ratio m. Among the many possible choices for two
26
2 Plasticity Characteristics (in Simple Tension/Compression)
independent elastic constants of the isotropic elastic modulus tensor in Eq. (1.30),
Young’s modulus E and Poisson’s ratio m are the most popular since they can be
directly measured from a simple tension test. The slope of the linear elastic behavior
of the initial slope, AC, and the new slope of the linear line after plastic deformation, DE, are approximately the same, especially when the amount of plastic
deformation remains small.
HW #2.1
Poisson’s ratio for metals as an isotropic linear elastic solid is usually near 0.3.
However, the value becomes approximately 0.5 for the isotropic incompressible
(implying no volume change) case (based on the engineering strain for infinitesimal
deformation). Prove this.
UTS (ultimate tensile strength) is the maximum engineering stress that a material
can withstand while being stretched. Most metals are so ductile that failure usually
occurs after UTS. However, there are exceptions which will be discussed later. The
importance of UTS is that the specimen is designed such that it deforms uniformly
within gauge length. However, its uniformity breaks down at UTS when deformation starts to be localized (or concentrated) at the center of the specimen; thus,
marking the start of necking (localized thinning of the specimen at the center
portion). A simple mechanical analysis of UTS as the limit of the uniform
deformation range within the gauge length will be further discussed in Chap. 3.
The data shown in Fig. 2.2 is typical for metals at room temperature. Its elastic
deformation is infinitesimal, for which the constitutive laws discussed with
Eq. (1.30) fits. Rubber as an amorphous material with three-dimensional
chain-network deforms quite differently from metals as shown in Fig. 2.3, which
schematically illustrates non-linear elastic behavior for the whole range of large
deformations: hyper-elasticity. For elasticity of metals and rubber, stress and strain
are not only related by functions but furthermore reversible deformation energy is
determined by the strain measure, without wasting energy for any micro-structural
change, which does not involve any permanent microstructural change.
Fig. 2.3 Nonlinear elastic
behavior of rubber
2.1 Engineering Stress-Engineering Strain Data
27
Fig. 2.4 Symmetric behavior
of tension and compression of
most metals with the
Bauschinger phenomenon and
the nature of deformation
history dependence of
plasticity
The simple compression behavior of metals is usually similar with the simple
tension behavior as shown in Fig. 2.4, with exceptions depending on crystal
structures, which will be further discussed briefly in Chap. 4. However, when a
simple tension test is performed beyond the yield stress and then unloaded to
Point E as shown in Fig. 2.4, the metal possessing a new arrangement of atoms by
plastic deformation usually exhibits larger tensile yield stress at Point D, compared
to the compressive yield stress at Point F. This incident, called the Bauschinger
phenomenon, is caused by heterogeneous micro-structures of metals associated
with poly-crystal structures and/or precipitates distributed within crystal structures
as second phase particles. Simple calculations will be performed in Chap. 5 to
briefly demonstrate the development of the Bauschinger phenomenon.
Another important nature of plasticity is its dependence on the history of
deformation shown in Fig. 2.4, which demonstrates that stress is not dependent on
the strain, but rather strain history. Note that the stress for Point B is shared by
Points B1 and B2 as well as infinitely many other deformation histories. The strain
for Points B1 is also shared by Points B3 and B4 as well as infinitely many other
deformation histories, each consuming different amounts of dissipation energy. For
the linear elasticity (elastic range C’B shown in Fig. 2.4) and the rubber elasticity
shown in Fig. 2.3, the stress and strain are determined by the strain and stress,
respectively, without any effect from deformation history, because they have a
one-to-one relationship.
Remark #2.1 The superposition principle for the linear boundary value
problem
As discussed in Chap. 1, continuum mechanics leads to the boundary value
problem, which consists of three major elements: Newton’s law, kinematics and
constitutive law. Newton’s law shown in Eqs. (1.26), (1.27) and (1.28) are linear.
Kinematics for the infinitesimal theory for solids or fluid dynamics shown in
28
2 Plasticity Characteristics (in Simple Tension/Compression)
Eqs. (1.29) and (1.31) is linear, while the constitutive laws shown in Eqs. (1.30),
(1.32), (2.25) and (2.26) for the linear elastic solid, linear viscous fluid and linear
viscoelasticity (to be discussed), respectively, are linear as well. For these cases, the
superposition principle is valid; i.e., the solution of a boundary condition can be
obtained by adding (or superposing) solutions of several boundary conditions as
long as those boundary conditions can be added up to construct the original
boundary condition. The constitutive law for plasticity is nonlinear; therefore, the
superposition principle, which is generally applied to linear elasticity and linear
viscoelasticity cases, is not applicable for plasticity. Besides, for large deformations
of solids, Eq. (1.29) becomes invalid and often nonlinear kinematics is applied;
therefore, the superposition principle is mainly for the infinitesimal theory for
solids.
2.2
True Stress-True Strain Data
In Fig. 2.2, stress and strain measures are obtained by normalizing force and
changes in length with the initial values of the cross-section and the gauge length,
respectively, as they are easily available. However, the resulting engineering values
do not properly describe material property when deformation is large. Therefore,
the engineering data needs further manipulation to convert it to true stress and true
strain data. This manipulation is a simple mathematical procedure, whose geometric
implication is also illustrated here. Discussions here are for simple tension and
compression test data; therefore, one-dimensional in nature. Also note that all the
differences related to engineering and true quantities including their
three-dimensional versions are valid only for the case of large deformations; they,
therefore, vanish for infinitesimal deformations.
As for true strain, its differential (known as the natural strain increment) is
defined as
det ¼
d‘
‘
ð2:1Þ
whose related three-dimensional version as a second order tensor (known as the
rate of deformation tensor) is defined in Eq. (1.31). Here, ‘ is the current length
(of the gauge length in the test). Therefore, the one-dimensional true strain (also
known as the logarithmic strain) becomes
Z
et ¼
Z
det ¼
d‘
‘
¼ ln
‘
‘o
ð2:2Þ
where ‘o is the initial length. The three-dimensional true strain tensor is supposedly
obtained by integrating Eq. (1.31), which is meaningful only under certain conditions as will be discussed later in Chap. 11.
2.2 True Stress-True Strain Data
29
As for the one-dimensional engineering strain (also known as the nominal
strain), its differential is
dee ¼
d‘
‘o
ð2:3Þ
Therefore,
Z
e ¼
e
Z
de ¼
e
d‘ ‘ ‘o D‘
¼
¼
‘o
‘o
‘o
ð2:4Þ
The three-dimensional version of the engineering strain tensor is Eq. (1.29), which
is known as the infinitesimal strain tensor since it is valid only for the case of
infinitesimal deformation. Considering Eqs. (2.2) and (2.4),
et ¼ lnð1 þ ee Þ or ee ¼ exp ðet Þ 1
ð2:5Þ
HW #2.2
As a continuation of HW #2.1, prove that Poisson’s ratio becomes exactly 0.5 for
the isotropic incompressible case based on true strain regardless of the deformation
size.
HW #2.3
Prove that et ee for infinitesimal deformation by graphically showing Eq. (2.5)
while applying the Taylor series for Eq. (2.5) for analytical demonstration.
The one-dimensional true stress is defined as
rt ¼
F
A
ð2:6Þ
where A is the current (cross-sectional) area (of the gauge length in the test). The
one-dimensional engineering stress (or the nominal stress) is
re ¼
F
Ao
ð2:7Þ
where Ao is the initial area. The difference between the current and initial areas
becomes trivial for infinitesimal deformation; therefore, the same can be stated for
the difference between true and engineering stresses. The three-dimensional true
stress tensor is the Cauchy stress tensor, which is most commonly used in the
constitutive laws including in Eqs. (1.30) and (1.32). There are several stress tensors available for the three-dimensional version of the engineering stress such as the
first and second Piola-Kirchhoff stress tensors but they are useful mainly to deal
with advanced topics.
The effort to obtain true stress-true strain data from the engineering data measured from a simple tension test is to characterize the hardening behavior for the
30
2 Plasticity Characteristics (in Simple Tension/Compression)
plastic deformation; however, the elastic strain of metals is infinitesimal in general;
therefore, it is common practice to regard the measured one-dimensional strain as
the plastic strain while ignoring the elastic strain, when large deformation plasticity
is considered.
Also, note that the plastic deformation is considered incompressible (implying
no volume change); i.e., there is virtually no volume change between Points A and
E in Fig. 2.2, since plastic deformation induces a new arrangement of atoms within
the same crystalline structure such that there is a permanent change in shape but
without any volume change.
2.2.1
Simple Tension Data
From Eq. (2.6),
rt ¼
F
F Ao
F ‘
‘ ‘o
¼
¼
¼ re
þ 1 ¼ re ðee þ 1Þ
A Ao A
Ao ‘o
‘o
ð2:8Þ
considering
Ao ‘o ¼ A‘
ð2:9Þ
which is the volume constant condition, Now, assume that the true stress-true strain
data is available for convenience. Then, obtain the true stress-engineering strain as
schematically shown in Fig. 2.5, considering Eq. (2.5) and 0 et \ee \1 for
tension.
Now, from Eq. (2.8),
1 : ð 1 þ e e Þ ¼ re : r t
Fig. 2.5 Schematic view of
the true stress-true strain
curve and the true stressengineering strain curve for
the simple tension data
ð2:10Þ
2.2 True Stress-True Strain Data
31
Fig. 2.6 Schematic view of the true stress-engineering strain curve and the engineering
stress-engineering strain curve for the simple tension data
Therefore, in Fig. 2.6,
1 : ð1 þ ee Þ ¼ AO : AC 0 ¼ re : rt ¼ OB : C 0 C ¼ C 0 B0 : C0 C
ð2:11Þ
where Point A is positioned at (−1, 0). For an arbitrary point C on the true
stress-engineering strain curve, Point B is obtained as an intersection of the y-axis
and the straight line connecting Points A and C. Hence, Point B’ which shares the
same engineering strain with Point C and the same engineering stress with point B
is on the engineering stress-engineering strain curve. Repeating the procedure for
all the points on the true stress-engineering strain curve leads to the construction of
the engineering stress-engineering strain curve. Now note that, since the engineering data is available from the test, the reverse procedure is taken to develop the
true stress-true strain curve from the measured engineering data.
In Fig. 2.6, there is one tangential line AE for the true stress-engineering strain
curve for metals, which meets at Point E. Then, Point D, the intersection of the line
AE and the y-axis and Point D’ on the engineering stress-engineering strain curve
represent the UTS point. As will be discussed later, deformation in the gauge length
after UTS is not uniform so that the true stress and strain data characterized is valid
as a material property only up to the UTS point (and any data obtained beyond the
tangential intersection Point E is discarded). The resulting true stress-true strain data
obtained up to the UTS point shows sustained hardening or saturation behavior
without any softening (with a negative slope) for metals.
32
2.2.2
2 Plasticity Characteristics (in Simple Tension/Compression)
Simple Compression Data
One-dimensional strain measures are generally positive for tension and negative for
compression as defined in Eqs. (2.2) and (2.4). However, one-dimensional strain
measures are considered positive here solely for convenience. Then, from Eq. (2.2),
et ¼ ln
‘o
‘
ð2:12Þ
with ‘o ‘ [ 0. Therefore, 0 et \1: Also, from Eq. (2.4),
ee ¼ 1 ‘
‘o
ð2:13Þ
so that 0 ee \1: Now, Eq. (2.5) becomes
et ¼ lnð1 ee Þ or ee ¼ 1 expðet Þ
ð2:14Þ
as shown in Fig. 2.7, while Eq. (2.8) becomes
rt ¼ re ð1 ee Þ
ð2:15Þ
Following the same procedure performed for the simple tension data, assume that
the true stress-true strain data is available for convenience. Then, obtain the true
stress-engineering strain curve as schematically shown in Fig. 2.8, considering
Eq. (2.14) and 0 ee \et for compression.
Now, from Eq. (2.15),
1 : ð1 ee Þ ¼ re : rt
Fig. 2.7 Schematic view of
the relationship between the
one-dimensional true and
engineering strains for
compression when they are
defined to be positive
ð2:16Þ
2.2 True Stress-True Strain Data
33
Fig. 2.8 Schematic view of
the true stress-true strain
curve and the true stressengineering strain curve for
the simple compression data
Fig. 2.9 Schematic view of
the true stress-engineering
strain curve and the
engineering
stress-engineering strain curve
for the simple compression
data
which is applied in Fig. 2.9 to construct the engineering stress-engineering strain
curve from the the true stress-engineering strain curve. Because engineering data is
also available from the test, the procedure is reversed to develop the true stress-true
strain curve from the measured engineering data. There is no UTS point for the
compression data; however, a simple compression test is tricky because the test is
prone to instability, especially to wrinkling for sheet samples. Since the true stress
and strain data for tension and compression are usually identical for most metals,
the most common practice to characterize the hardening behavior of metals is to
perform a simple tension test.
34
2 Plasticity Characteristics (in Simple Tension/Compression)
HW #2.4
Complete the discussion to construct the engineering stress-engineering strain curve
from the true stress-engineering strain curve for the simple compression data using
Fig. 2.9.
Empirical work hardening laws
The following four empirical hardening laws are commonly used to mathematically
fit the measured hardening data:
(1) Ludwick (1909),
¼r
y þ Ken
r
ð2:17Þ
¼ Ken
r
ð2:18Þ
¼ Kðe0 þ eÞn
r
ð2:19Þ
(2) Hollomon (1944),
(3) Swift (1952),
(4) Voce (1948),
¼ A B expðCeÞ; with B ¼ expðne0 Þ
¼r
0 expðnðe e0 ÞÞ or r
r
ð2:20Þ
and e are the effective (or equivalent) stress and the accumulated effective
Here, r
(or equivalent) strain, respectively, which will be extensively discussed later. They
are usually equivalent with the true stress and true strain in the one-dimensional
simple tension data, respectively. All other quantities are material constants. The
measured simple tension data is valid only up to the UTS point. Therefore, the
measured data is collected only up to this point and converted to the true stress and
strain data as a material property, fitted with one of the four laws listed above or
other more sophisticated laws. They are then frequently applied to a whole range of
deformations beyond the UTS point.
Remark Simplification of hardening laws
The true stress and true strain data ultimately obtained are often simplified to
pursue convenience in calculation or analysis. Figure 2.10 shows four typical
simplifications. In the rigid plasticity, the infinitesimal elastic deformation of
metals is ignored, while hardening behavior is ignored for perfect plasticity.
2.2 True Stress-True Strain Data
35
Fig. 2.10 Four typical simplified true stress and true strain data
HW #2.5
Assuming incompressibility for a rigid-perfect plastic material, find and plot the
corresponding engineering stress-engineering strain curves in tension and compression. For this model, at what stain would necking commence in a tension test?
HW #2.6
The following data was obtained with a simple tension test using a specimen with
the diameter of 1.282 cm.
Diameter, cm
Load, Newton
1.237
1.222
1.200
1.176
1.143
1.113
1.064
1.021
0.953
0.917
0.889
0.828
Fracture
30,024
41,144
46,259
48,483
49,372
49,817
48,928
48,038
45,369
43,145
42,256
39,809
36
2 Plasticity Characteristics (in Simple Tension/Compression)
Plot the engineering stress-engineering strain curve and the true stress-true strain
curve, assuming incompressibility. Also, assuming that the true stress-true strain
curves in tension and compression are the same, plot its engineering
stress-engineering strain curve in compression.
HW #2.7
The elastic deformation of metals is usually infinitesimal; however, that of polymers can be large. Here, consider a simple tension test for which the external force
F, the diameter of the circular cross-section of the specimen D0 and the gauge
length ‘0 are given. Then, set up equations to calculate the stress and the current
diameter of the circular cross-section for linear isotropic elasticity with Young’s
modulus E and Poisson’s ration m; (1) when deformation is infinitesimal (therefore,
based on the engineering stress and strain for simplicity) and (2) when deformation
is large (therefore, based on the true stress and strain). The resulting equations
would imply that all large deformation cases are generally statically indeterminate
(since the current area to calculate the true stress always involves a simultaneous
calculation for the amount of deformation) and the statically determinate case is
viable only when deformation is infinitesimal. However, most infinitesimal deformation cases are still statically indeterminate and a simple tension case, which
happens to be statically determinate, is more exception than rule.
2.3
Viscoelasticity
There are three major classes of mechanical properties of solids at room temperature: elasticity, plasticity and viscoelasticity. Since linear elasticity and plasticity
have already been briefly discussed, linear viscoelasticity, developed mainly to
describe time-dependent deformation such as of polymeric materials, is briefly
reviewed here for completeness. Since a variety of new materials are being
developed for numerous applications on a daily basis these days, having a reasonably good understanding of these three basic properties is instrumental for
engineers in the field of materials mechanics.
The one-dimensional version of linear viscoelasticity is discussed here since its
three-dimensional extension is rather straightforward, following similar procedures
that extend the one-dimensional linear elasticity or linear viscous fluid mechanics to
their three-dimensional versions. To account for time-dependent deformation, the
one-dimensioal linear viscoelasticity is constructed by combining the
one-dimensional versions of linear elasticity discussed with Eq. (1.30) and the
linear viscous fluid mechanics discussed with Eq. (1.32); thereby, as a mixture of a
typical solid and fluid, visocelasticty is applied not only to solids but also to fluids.
Theoretically, there is no distinction between true and engineering stress and strain
for infinitesimal deformation.
2.3 Viscoelasticity
37
Elastic solid
Viscous fluid
Maxwell fluid
Kelvin solid (or Voigt model)
Fig. 2.11 Four basic models of linear viscoelasticity
The one-dimensional linear elastic solid and linear viscous fluid are represented
by a spring and a dash-pot, respectively, in Fig. 2.11, with their properties as
rs ¼ Ees
ð2:21Þ
rd ¼ g_ed
ð2:22Þ
for a spring and
for a dash-pot, where g: is the viscocity. The subscripts, ‘s’ and ‘d’, identify the
values of the spring and the dash-pot, respectively. When the two are arranged
sequentially and in parallel, the Maxwell fluid and Kelvin (or Voigt) solid models
are obtained, respectively. Their constitutive laws become linear ordinary differential equations as
e_ ¼ e_ s þ e_ d ¼
r
r_
þ
E g
ðwhere r ¼ rs ¼ rd Þ
ð2:23Þ
ðwhere e ¼ es ¼ ed Þ
ð2:24Þ
for the Maxwell fluid and
r¼rs þ rd ¼ Ee þ g_e
for the Kelvin solid. For a given stress or strain history, time-dependent strain or
stress is obtained by solving those differential equations.
38
2 Plasticity Characteristics (in Simple Tension/Compression)
Fig. 2.12 The Dirac delta function and the Heaviside function
In viscoelasticity, creep (of strain) and relaxation (of stress) behaviors are particularly important. In the case of creep, the stress is prescribed using a Heaviside
function (also known as a step function) magnified with the size of r0 and the
strain is obtained as creep behavior. In the case of relaxation, the strain is prescribed
using a Heaviside function magnified with the size of e0 and the stress is obtained as
relaxation behavior. When r0 ¼ 1:0 or e0 ¼ 1:0 in particular, creep behavior and
relaxation behavior become creep compliance C(t) and the relaxation modulus R(t),
respectively, as viscoelastic property parameters that also have a one-to-one relationship between them. Note that solving the ordinary differential equation for creep
and relaxation behaviors involves singularity functions such as the Dirac delta
function dðt t0 Þ and the Heaviside function Hðt t0 Þ shown in Fig. 2.12. Creep
and relaxation behaviors of the Maxell and Kelvin models are shown in Fig. 2.13.
HW #2.8
Solve the creep and relaxation behaviors for the Maxwell and Kelvin models using
the standard method to solve differential equations.
(Hint: When solving differential equations based on the standard method, the
initial condition can be handled by considering two possible cases shown in
Fig. 2.14. For Case 1, the slope is zero at t = 0− and becomes finite at t = 0+, while
for Case 2, the slope becomes infinite at t = 0. The right and left hand sides of the
differential equation should be consistent for the initial condition, considering those
two cases shown in Fig. 2.14: Case 1 which is continuous but whose slope is finite
with discontinuity and Case 2 whose slope is infinite)
HW #2.9 (optional)
Review the Laplace transformation and then solve for the creep and relaxation
behaviors of the Maxwell and Kelvin models using the Laplace transformation.
Note that the Laplace transformation is especially convenient for solving linear
ordinary differential equations, which involve singularity functions.
In order to account for the general behavior of linear viscoelasticty, the Maxwell
model is generalized by arranging it in parallel or alternatively, the Kelvin model is
2.3 Viscoelasticity
Fig. 2.13 The creep and relaxation behaviors of the Maxell and Kelvin models
Fig. 2.14 Two possible cases
compatible with initial
conditions
39
40
2 Plasticity Characteristics (in Simple Tension/Compression)
(a)
(b)
Fig. 2.15 Generalization of a the Kelvin model and b the Maxwell model
generalized by arranging it sequentially as shown in Fig. 2.15. Note that the two
generalizations are interchangeable, without introducing a new generalized set. The
generalized model leads to high order linear differential equations as its mechanical
property and possesses its own C(t) and R(t). The Laplace transformation is particularly handy in deriving those differential equations for the generalized models.
In the generalized Kelvin model, when a single dashpot is sequentially arranged
with other members, it is regarded as fluid (such as the Maxwell fluid) and,
otherwise, it is regarded as solid (such as the Kelvin solid).
Aside from linear differential equations, there is an alternative way to describe
the linear viscoelastic property: the hereditary integral based on the creep compliance or the relaxation modulus. As shown in Fig. 2.16, the current amount of
strain at the time of t is the accumulation of the creep strain developed during the
elapsed time of t-t’, each of which is contributed by the increment of stress loaded at
the time of t’; i.e.,
eðtÞ ¼
X
Dei ¼
X
0
0
Zt0 ¼t
Drðti ÞCðt ti Þ !
0
Cðt t Þ
t0 ¼0
drðt0 Þ 0
dt
dt0
ð2:25Þ
2.3 Viscoelasticity
41
Fig. 2.16 Linear superposition of step inputs for the development of the hereditary integral
In deriving Eq. (2.25), the superposition principle is applied, which is valid here for
the linearity of viscoelasticity. Similarly, for the current stress,
Zt0 ¼t
0
Rðt t Þ
rðtÞ ¼
t0 ¼0
deðt0 Þ 0
dt
dt0
ð2:26Þ
Hereditary integrals are more commonly utilized than differential equations since
the relaxation modulus or the creep compliance, which is measured to characterize
the viscoelastic property, is directly applicable.
42
2 Plasticity Characteristics (in Simple Tension/Compression)
HW #2.10
Complete the two hereditary integrals for the Maxwell and Kelvin models,
respectively.
HW #2.11 (optional)
The hereditary integrals are convolutions (integrals) in mathematical terms. These
also become integral equations, for which the Laplace transformation is useful.
Review the theorem of the Laplace transformation for convolution.
References
Hollomon, J. H. (1944). The effect of heat treatment and carbon content Oil the work hardening
characterist ics of several steels. Transactions of American Society for Metals, 32, 123.
Ludwik, P. (1909). Elemente der technologischen Mechanik. Berlin: Springer.
Swift, H. W. (1952). Plastic instability under plane stress. Journal of the Mechanics and Physics of
Solids, 1, 1–18.
Voce, E. (1948). The relationship between stress and strain for homogeneous deformation. Journal
of the Institute Metals, 74, 537–562.
Chapter 3
Instability in Simple Tension Test
3.1
Necking for Metals
As discussed in Chap. 2, the UTS (ultimate tensile strength) point observed in the
simple tension test for both sheet and bulk specimens is important as it is the limit
of uniform deformation in the gauge length, which is analyzed here. In this simplified one-dimensional analysis, the entire specimen, particularly the centrally
located gauge length area, is considered to be made of one-dimensional slabs whose
boundaries are marked with dotted lines as shown in Fig. 3.1. As one-dimensional
slabs, their geometric continuity and force equilibrium are imposed only in the
tensile direction (and those in through-thickness direction are ignored for simplicity): the one-dimensional slab analysis.
Now, based on Eqs. (2.2), (2.8) and (2.9),
Fðet Þ ¼ rt ðet Þ Aðet Þ ¼ rt Ao
‘o
¼ rt ðet ÞAo expðet Þ
‘
ð3:1Þ
where the true stress and the cross-sectional area monotonously increases and
2 t
2
decreases, respectively, as shown in Fig. 3.2 (with ddert2 \0 and ddet2A [ 0). Here,
incompressibility of rigid-plasticity is assumed. Note that the force-true strain curve
and the engineering stress-engineering strain curve are similar to each other, having
one maximum point (as UTS), when the relationships between the force and the
engineering stress as well as the true strain and the engineering strain are considered
2
2 e
as shown in Eqs. (2.5), (2.7) and Fig. 2.5 (with ddet2F \0 and ddere2 \0) .
Now, consider that the initial cross-sectional area in the gauge length is uniform
in principle but slightly smaller at the center in truth; i.e.,
Ao1 \Ao2 \Ao3
© Springer Nature Singapore Pte Ltd. 2018
K. Chung and M.-G. Lee, Basics of Continuum Plasticity,
https://doi.org/10.1007/978-981-10-8306-8_3
ð3:2Þ
43
44
3 Instability in Simple Tension Test
123
Fig. 3.1 The one-dimensional slab analysis of the simple tension test
Fig. 3.2 Schematic view of the UTS point
where the subscript number identifies the location of the cross-sectional area in
Fig. 3.1. Physically, all slabs in the gauge length are not the same micro-structurally
such that one may be slightly weaker than the rest, making it the likely point of
fracture. This point may not be located at the center of the gauge length, even when
their cross-sectional areas are ideally the same. To induce a fracture at the center,
the specimen may be prepared by slightly tapering the specimen at the center in
accordance with Eq. (3.2). Even without such tapering, specimens often fail at the
center because of the boundary constraint effect, which is obvious in Fig. 2.1
without a dog-bone shape, but significantly subdued with a dog-bone shape.
Consequently, the center slab is slightly less constrained than its neighbors so that it
extends more, which is accounted for with the condition in Eq. (3.2).
When the condition shown in Eq. (3.2) is imposed on Eq. (3.1), F1 \F2 \F3 for
the same strain as shown in Fig. 3.3, all curves are similar in shape but magnified with
different initial cross-sectional areas; therefore, the UTS for each curve share the same
strain, meanwhile the engineering stress (or force) levels for UTS differ for each slab.
Now, the force equilibrium condition along the tensile direction is imposed at
every moment during the test
F ¼ F1 ¼ F2 ¼ F3
ð3:3Þ
where F is the external force at every moment. As shown in Fig. 3.3, which is
severely exaggerated, et3 \et2 \et1 ; however, their difference is so small in truth (as
is difference in the initial cross-sectional areas) that deformation is virtually uniform
before the external force reaches the UTS point, confirming that even the slight
tapering would not affect the uniformity of deformation. Once the external force
3.1 Necking for Metals
45
Fig. 3.3 The uniform deformation before UTS and abrupt deformation localization at the center
(neck formation) after UTS
reaches the UTS point, it starts to decrease as the rate at which the cross-sectional
area decreases starts to be more dominant than the rate at which the stress increases
at the center slab. Note that during this decrease of external force, the central slab
continues to deform; however, all other neighboring slabs stop deforming because
of unloading (which is elastic in reality) since the external force is unloaded before
they reach their own UTS points. As deformation is concentrated at the center slab
after the UTS point, the specimen exhibits necking, conspicuous diminishing of the
cross-sectional area at the center of the specimen.
The condition for the UTS point, as the maximum external force condition, is the
condition for the rate at which the cross-sectional area decreases to match with the
rate at which the stress increases; i.e.,
dF ¼ drt A þ rt dA ¼ 0 !
drt
dA d‘
¼
¼ det
¼
A
‘
rt
ð3:4Þ
considering Eq. (2.9). Therefore,
drt
¼ rt
det
ð3:5Þ
implying that the slope and the magnitude of the true stress match each other in the
true stress and strain data as schematically shown in Fig. 3.4: the Considère criterion (1885) for (diffuse) necking or the UTS point. Because of the similarity of
the two between the force-true strain and engineering stress-engineering strain
curves, the true strain of UTS obtained in Eq. (3.5) is simply converted to its
engineering value using Eq. (2.5) without any further manipulation.
When the criterion in Eq. (3.5) is applied for the Hollomon hardening law in
Eq. (2.18), the true strain for UTS becomes, et ¼ n. Therefore, the n-value (known
as the strain hardening exponent) is considered to be one of most important
material parameters associated with the propensity of a sample material for the
onset of deformation (or strain) localization.
46
3 Instability in Simple Tension Test
Fig. 3.4 Schematic view of
the UTS point in the true
stress-true strain curve
HW #3.1
For the four empirical hardening laws introduced in Eqs. (2.17)–(2.20), calculate
the true strains and engineering strains of UTS.
The one-dimensional slab analysis is effective in illustrating the break-down of
the uniform deformation in the gauge length at the UTS point. However, it is
unrealistic for deformation to be concentrated solely at the center slab after UTS,
since material elements are three-dimensionally continuous in reality, unlike the
one-dimensional slab model; therefore, even though deformation is localized at the
center element after UTS, neighboring elements deform together considerably for
most ductile metals before fracture occurs. A two-dimensional localized deformation
near the center in the gauge length, which is a more realistic deformation localization
model after UTS, will be further discussed in Chap. 17 for ductile sheets.
3.2
Neck Propagation for Polymers (Cold Drawing)
The one-dimensional slab analysis is also useful to explain the neck propagation
(also known as cold drawing) experimentally observed for some polymers, especially semi-crystalline polymers such as polypropylene. As shown in Fig. 3.5, such
a polymer has a plateau zone in its hardening behavior after initial hardening,
during which polymer chains are unfolded in the microstructure. With further
stretching of unfolded chains, hardening sharply increases after the plateau zone
until fracture. With this distinctive hardening behavior for such a polymer, their
force-true strain curve has local maximum and minimum points as shown in
Fig. 3.4.
When an analysis is performed for such a polymer with Fig. 3.6, as similarly
done for a metal, neck propagation shown in Fig. 3.7 is explained. In Figs. 3.6a and
3.2 Neck Propagation for Polymers (Cold Drawing)
47
Fig. 3.5 Schematic view of the force-true strain curve of some polymers
Fig. 3.6 a Uniform deformation before the local maximum point, b localization of deformation at
the center (neck formation) after the external force reaches the local maximum point (at P) with
ensuing slight unloading (at Q) and reloading (at R), c further deformation localization extended to
element 2 and d to element 3 (neck propagation)
Fig. 3.7 Schematic view of neck propagation (also known as cold drawing)
48
3 Instability in Simple Tension Test
3.7a, deformation is virtually uniform before external force reaches its local maximum point. Deformation is then localized at the center (neck formation) after the
force reaches the local maximum point as shown in Figs. 3.6b and 3.7b. When the
force is further loaded, slight unloading follows and soon reloaded again as shown
in Fig. 3.6c and deformation is localized at element 2 as shown in Fig. 3.7c. With
further loading, slight unloading and reloading leads to extension of deformation
localization to element 3 in Fig. 3.6d: neck propagation.
3.3
Strain-Rate Sensitivity Effect
When the simple tension test is performed with different grip speeds or deformation
rates, stress responses vary, showing strain-rate sensitivity. Even though the magnitude of strain-rate sensitivity is not so large for metals at room temperature, it has
a strong effect on deformation (strain) localization (or uniformity) along with the
n-value. The strain-rate sensitivity is typically represented in the constitutive law in
multiplicative form with the hardening law; i.e.,
m
e_
r ¼ f ðeÞ e_ o
ð3:6Þ
where f ðeÞ is the hardening law such as the four laws introduced in Eqs. (2.17)–
(2.20) and m is the strain-rate sensitivity exponent, while e_ o is the reference strain
rate. A positive m-value promotes uniformity of deformation (strain) distribution
and the negative m-value demotes uniformity of strain distribution in general. Most
metals have slight positive m-values at room temperature, with exception to aluminum alloys, which are known to have slight negative m-values but are assumed
to be strain-rate insensitive for practical purposes.
To demonstrate the positive m-value effect in the simple tension test, deformation before the UTS point is considered in Fig. 3.8a, in which A1 and A2 are the
positions of slabs 1 and 2, respectively, for the strain-rate insensitive case (with
m = 0). Now, assume that A1 of slab 1 is repositioned to B1 for the strain-rate
sensitive case with an added stress increment contributed by strain-rate, which is, in
average, etA1 divided by the process time t. Similarly, A2 might be repositioned to B2
for the strain-rate sensitive case with the similar contribution by strain-rate.
However, etA2 is smaller than etA1 ; therefore, the contribution by etA2 to the added
stress increment is smaller than that by etA1 such that force B2 is lower than that of
B1. Consequently, in order to satisfy the force equilibrium for the positive
strain-rate sensitive case, slab 2 is supposed to deform more than etA2 to etC2 ;
therefore, uniformity of deformation between slabs 1 and 2 is promoted for the
positive strain-rate sensitive case. Note however that deformation before the UTS
point is virtually uniform anyway; therefore, contribution by the positive m-value is
unnoticeable before UTS.
3.3 Strain-Rate Sensitivity Effect
49
Fig. 3.8 The promotion of strain uniformity by the positive strain-rate sensitivity a before and
b after the UTS point
As for the deformation after the UTS point shown in Fig. 3.8b, A1 and A2 are the
positions of slabs 1 and 2, respectively, for the strain-rate insensitive case. Now,
assume that A1 of slab 1 is repositioned to B1 for the strain-rate sensitive case with
an added stress increment contributed by strain-rate. To satisfy the force equilibrium for the strain-rate sensitive case, slab 2 is supposed to deform further plastically to etC2 , instead of elastic unloading for the strain-rate insensitive case, so that
uniformity of deformation between slabs 1 and 2 is promoted for the positive
strain-rate sensitive case. Note however that, unlike the case of deformation before
the UTS point in which contributions by the positive m-value is unnoticeable, the
promotion of uniformity (or demotion of strain localization) by the positive m-value
is conspicuous. In general, for positive strain-rate sensitive cases, the UTS point as
the maximum engineering stress becomes rather blurred with the strain-rate sensitivity effect and, even after the UTS point, some neighboring slabs deform
plastically along with the center slab for some time even in the one-dimensional
slab analysis. Also, the rate at which the engineering stress decreases after the UTS
point is subdued compared to that of the strain-rate insensitive case.
3.4
Strain Localization and Fracture for Sheet Specimens
Most commercial metals are so ductile at room temperature that their fracture in the
simple tension test occurs after the UTS point with severe strain location, typically
at the center of the specimen, as shown in Fig. 3.9a. However, some rather brittle
metals fail before the UTS point; therefore, without strain localization as shown in
Fig. 3.9b.
Failure patterns of fractures with or without severe strain localization are easily
discernible as shown in Fig. 3.10a for simple tension tests particularly of sheet
specimens. For DP980 (dual phase) and 340R (low carbon) steel sheets, which
fail with severe strain localization (after the UTS point), fracture lines appear
50
3 Instability in Simple Tension Test
Fig. 3.9 a Failure after necking and b failure before necking
skewed from the top view, while side views show conical shapes with rough
fracture surfaces resulting from significant micro-void growth during strain localization. The TWIP (twining induced plasticity) steel sheet shows a fracture that
appears vertical from the top view and skewed from the side view with clean
fracture surfaces without local thinning. Samples that fail with severe strain
localization demonstrate well developed voids and dimples at the fractured surface
when magnified. In contrast, those which fail without strain localization do not, as
shown in Fig. 3.10b.
Note that the TWIP steel sheet failed before the UTS point not because the sheet
is brittle, but rather because its uniform deformation limit is unusually large.
However, typical commercial metal sheets fail with severe strain localization after
the UTS point and strain localization starts at the UTS point as the one-dimensional
slab analysis implies: the onset of diffuse necking. Once strain localization starts,
material elements in the gauge length still continue to deform together with the
critical element, which eventually fails and fractures at the center, unlike what the
one-dimensional slab model suggests. Furthermore, their deformation modes are no
longer simple tension but biaxial stretching modes. The gradual strain localization
after the UTS point eventually leads to severe localization, in which strain is
virtually localized only at the very close neighbors of the critical element, thus
forming the skewed line shown in Fig. 3.10a. At the onset of severe localization (or
the skewed line formation), the critical element often deforms approximately twice
the uniform deformation limit (or the n-value) by itself. The angle of the skewed
line is dependent on material properties, which will be further discussed later in
Chap. 17.
Once severe strain localization begins and forms a skewed line, deformation is
three-dimensional and ultimately fractures at the critical element, which often
deforms four or five times the uniform deformation limit when it fails. The exact
amount of deformation of the critical element at the moment of fracture could be a
quantifiable material property. However, this information is extremely difficult to
measure because of severe localization. Fortunately, the exact measurement of
fracture deformation is not critically important for practical applications in forming
3.4 Strain Localization and Fracture for Sheet Specimens
51
(a)
Material
340R*
DP980
TWIP940*
Fracture
Fracture with strain
localization
Fracture with strain
localization
Fracture without strain
localization
Top
view
Side
view
(b)
Material
340R*
TWIP940*
Fractured
surfaces
Fig. 3.10 Fracture with or without severe strain localization observed in the simple tension test:
the view of a specimens and b magnified fractured surfaces (Chung et al. 2014)
process optimization, since the onset of severe strain localization practically
determines the deformation limit in forming operations. Therefore, it is common
practice to consider the deformation at the onset of severe localization and skewed
line formation as a material property, also known as the forming limit. The forming
limit is experimentally measured, using special tools and procedures. The
three-dimensional nature of the skewed line with its strain localization is known as
localized necking, which is different from the diffuse necking at the onset of initial
strain localization. The forming limit for a general case with biaxial stretching will
be further discussed in Chap. 17. When sheets fail without strain localization such
as the case of the TWIP steel sheet, fracture deformation is rather straightforward to
measure as a material property.
References
Chung, K., Kim, H., & Lee, C. (2014). Forming limit criterion for ductile anisotropic sheets as a
material property and its deformation path insensitivity. Part I: Deformation path insensitive
formula based on theoretical models. International Journal of Plasticity, 58, 3–34.
Considère, A. (1885). Annales des Ponts et Chaussées, 9, 574–775.
Chapter 4
Physical Plasticity
Physical plasticity deals with issues relevant to plastic deformation in the
microstructural level, which is therefore beyond the scope of continuum plasticity.
However, a few basic features are briefly reviewed here, since these provide some
theoretical foundations of continuum plasticity, as will be discussed later.
4.1
Theoretical Strength of Metals
Metals have crystalline structures at room temperature typically in body-centered
cubic (BCC), face-centered cubic (FCC) and hexagonal close-packed
(HCP) crystals: iron with BCC, aluminum, copper, lead, silver and nickel with
FCC, while magnesium with HCP. For FCC and HCP crystals, two-dimensional
close-packed planes are stacked in parallel as schematically shown in Fig. 4.1.
Then, two extreme cases of theoretical strength can be considered: one by normal
stress and the other by shear stress, which are shown in Fig. 4.1a and b, respectively. The atom size r0 is considered here as the inter-atomic distance for electrical
equilibrium shown in Fig. 1.5 and ‘o is the distance between the layers.
4.1.1
Tensile (or Cleavage) Strength by Orowan (1949)
The tensile or cleavage strength is the normal stress required to break the crystal as
shown in Fig. 4.1a. As the two layers are forced to be separated by the distance D‘y
from its stable position, ‘o , an inter-atomic force develops as shown in Fig. 1.5.
When the force is approximated by the sine function with the periodicity of 2d,
© Springer Nature Singapore Pte Ltd. 2018
K. Chung and M.-G. Lee, Basics of Continuum Plasticity,
https://doi.org/10.1007/978-981-10-8306-8_4
53
54
4 Physical Plasticity
Fig. 4.1 Theoretical strength of crystals for a tensile stress and b shear stress
2p D‘y
ry ¼ Ky sin
2d
Ky p D‘y
E D‘y
¼ Eey ¼
d
‘o
ð4:1Þ
assuming that the separation is small for simplicity and applying linear elasticity for
initial deformation. Therefore, the maximum strength becomes
¼ Ky rmax
y
Ed E
p‘o p
ð4:2Þ
considering that the half periodicity d and ‘o are in a similar order as their magnitude. The result shows that the theoretical cleavage strength of metals is in the
magnitude of Young’s modulus. Note however that the actual strength of metals is
orders of magnitude below that, because there are intrinsic micro-cracks as defects
in the crystals and the required (cleavage) stress is achieved at the tips of these
micro-cracks by stress concentration even when the material is loaded with stress,
which is only a fraction of that required stress.
4.1.2
Shear Strength by Frenkel (1926)
As for the theoretical shear strength, there is relative sliding of two neighboring
planes by shear stress, which is approximated by the sine function with the periodicity of r0 as shown in Fig. 4.1b. Then, for the relative sliding of D‘xy ,
2p D‘xy
2Kxy p D‘xy
G D‘xy
rxy ¼ Kxy sin
¼ 2Gexy ¼
r0
r0
‘o
ð4:3Þ
4.1 Theoretical Strength of Metals
55
assuming that the sliding is small for simplicity and applying linear elasticity for
initial sliding. Therefore, the maximum shear strength becomes
rmax
xy ¼ Kxy Gr0
G
2p‘o 2p
ð4:4Þ
considering that r0 and ‘o are in the similar order of their magnitude. The result
shows that the theoretical shear strength of metals for relative sliding is in the
magnitude of the elastic shear modulus. When the relationship between Young’s
modulus and the shear modulus for isotropic elasticity is considered
rmax
xy rmax
G
E
y
¼
¼
2p 4pð1 þ mÞ 4ð1 þ mÞ
ð4:5Þ
where m is Poisson’s ratio. Note however that the actual shear stress of metals to
introduce relative sliding of neighboring planes is orders of magnitude below the
theoretical value. The reason for this is that crystals have intrinsic line defects as
dislocations. The sliding of neighboring planes by shear stress is plastic deformation since it involves permanent shape (or dimensional) changes but without volume change (therefore, incompressible plastic deformation) nor breakage.
Dislocations significantly ease the sliding of planes, plastic deformation, as will be
further discussed below.
4.2
Imperfections in Crystals
The theoretical strength of crystals assumes that crystals are in perfect conditions
without any imperfections. However, in reality, all crystals in thermodynamically
stable states naturally have imperfections or defects, which are schematically
described in Fig. 4.2. The presence of these defects is so important since it strongly
affects material properties including the mechanical properties of crystals such as
the yield stress and the hardening behavior in plastic deformation. In addition to
micro-cracks, which affect cleavage strength, there are three kinds of defects: point
defects, line defects and surface defects.
Fig. 4.2 Schematic of
imperfections in crystals
56
4.2.1
4 Physical Plasticity
Point Defects
Point defects refer to defects with a single atom in the normal crystal array as
schematically illustrated in Fig. 4.3. There are three major point defects: vacancies,
interstitials and substitutional impurities (Meyers and Chawla 2009).
Vacancies: a vacancy is when an atom is missing within a crystal array.
Interstitials: an interstitial is an atom on a non-lattice site.
Substitutional impurities: an impurity is the substitution of a regular lattice atom
with an atom that does not normally occupy that site.
4.2.2
Line Defects (Dislocations)
Line defects refer to linear atom defects in the normal crystal array and the most
common type of line defect is a dislocation. There are two distinct types of dislocations: edge dislocation and screw dislocation (William D. Callister, Jr., 2013).
The edge dislocation shown in Fig. 4.4 describes an extra plane of atoms inserted in
a normal crystal structure, while the screw dislocation shown in Fig. 4.5 describes a
shifting of arrays above a line so that both dislocations have mismatched arrays
above and below dislocation line. These two types of dislocations are combined in
real crystal structures as shown in Fig. 4.6.
As shown in Figs. 4.4, 4.5 and 4.6, dislocations ease the plastic deformation as
can be explained by the analogy between moving a carpet (by pulling or folding)
and the sliding of a plane in crystals. The analysis of theoretical shear strength by
Frenkel accounts for the case when the whole carpet is pulled, while the sliding
involving dislocations accounts for the case when the carpet is moved by introducing a fold from one side, as schematically illustrated in Fig. 4.4 for the role of
the edge dislocation.
Fig. 4.3 Examples of point
defects
4.2 Imperfections in Crystals
57
Fig. 4.4 Edge dislocation, plastic deformation by shear stress and the representation of the
analogy between caterpillar moving and the dislocation motion
Fig. 4.5 Screw dislocation and plastic deformation by shear stress
Fig. 4.6 Combination of
edge and screw dislocations
and plastic deformation by
shear stress (Hensel 1979)
Plastic deformation involving a plane sliding by shear stress is mainly achieved
by dislocation sliding. However, the amount of shear stress necessary for the sliding
of dislocations depends on the crystal structures as well as the planes and directions
of sliding for a particular crystal structure; i.e., some particular sliding directions on
some particular planes are more prone to slide than the other and they are called the
preferred slip system of a particular crystal structure. In addition to the major
influence of crystal structures and their slip systems as well as the amount of
dislocations, point defects and surface defects also affect the shear stress amount
necessary for plastic deformation since they interfere with the sliding of
dislocations.
58
4.2.3
4 Physical Plasticity
Surface Defects
Surface defects refer to imperfections extended in two-dimensions, which include
the external surface since the atoms on the surface are not fully compatible with
atoms within a crystal as they have their neighbors only on one side of the surface.
A metal in a natural state contains many crystals of various orientations, even
though it may contain one phase such as FCC with copper. These individual
crystals are called grains and they are separated by grain boundaries, which is a type
of surface defect. Within a grain, crystal patterns and orientation are uniformly
distributed as schematically shown in Fig. 4.7: the polycrystalline structure. At
room temperature, the grain boundary interferes with dislocation sliding; therefore,
strength increases with finer grained structures, as accounted for by the Hall–Petch
theory. At elevated temperatures, the situation is reversed in that grain boundaries
can accommodate dislocations, resulting in creep behavior.
Along with external surfaces and grain boundaries, twinning boundaries (or
planes) illustrated in Fig. 4.8 are also one type of surface defect. Note that there are
two mechanisms for plastic deformation: one is the slipping (or sliding) of dislocations (with changing neighboring atoms) and the other is twinning (without
changing neighboring atoms). Both are by shear stress (Meyers and Chawla 2009).
Plastic deformation by twinning and dislocation sliding under shear stress is
schematically compared on the atomistic level in Fig. 4.9 and in the simple tension
test level in Fig. 4.10. Note that twinning involves atoms shifting positions in a
narrow zone by shear stress and does not involve any sliding (Reed-Hill and
Abbaschian 1973) and (William Callister, Jr., 2013).
Ultimately, dislocation sliding and twinning compete for plastic deformation
under shear stress, for which temperature, deformation speed, crystal structures and
stacking fault energy play important roles as summarized in the bellow (Meyers and
Chawla 2009).
Fig. 4.7 Schematic
polycrystalline structure of
metals
4.2 Imperfections in Crystals
59
Fig. 4.8 Schematic of twinning in FCC metals
(1) Dislocation slip involves diffusion of atoms (and friction between atoms) so
that it is temperature dependent, while twinning is not.
(2) In general, at low strain rates, slip is easier.
(3) At lower temperatures and high strain rates, twining is easier.
(4) As for the crystal structure effect, HCP has less slip systems so it is more prone
to twinning, while BCC is prone to twinning at low temperatures. On the other
hand, twinning is more difficult for FCC.
As a way to resolve global warming issues, major efforts have recently been
made to develop new sheet metals especially for automotive applications, some of
which involve twinning for plastic deformation as shown in Fig. 4.11. In the figure,
hardening behaviors of three automotive sheet metals at room temperature are
compared. The 340R is a low carbon steel with a BCC structure and its plastic
deformation mainly involves dislocation sliding. The TWIP (Twinning Induced
Plasticity) steel sheet is one of advanced high strength steels (whose significantly
high strength can be easily confirmed in Fig. 4.11), which has an FCC structure and
its plastic deformation predominantly involves twinning. The magnesium alloy
sheet has an HCP structure and its plastic deformation is mainly dislocation sliding
for tension and twinning for compression; therefore, hardening behaviors for tension and compression are not symmetric as confirmed in Fig. 4.11 (Note that the
data in Fig. 14.12c is the true stress-true strain data).
In summary, plastic deformation is introduced by shear stress, involving dislocation sliding and twinning, and is incompressible, which will be extensively utilized to formulate the three-dimensional constitutive laws for continuum plasticity
in Part III. There exist the slip systems for dislocation sliding (slip planes and slip
Fig. 4.9 Comparison of plastic deformation by a twinning and b dislocation sliding under shear stress
60
4 Physical Plasticity
4.2 Imperfections in Crystals
61
Fig. 4.10 Comparison of plastic deformation by a twinning and b dislocation sliding under shear
stress in the simple tension test
Fig. 4.11 Comparison of hardening behaviors of three automotive sheets at room temperature
a 340R (Chung et al. 2011) b TWIP (Chung et al. 2011) and c Mg (Lee et al. 2008)
directions for easy sliding) and the critical shear stress for a single crystal. Point/
line/surface defects contribute to the magnitude of the critical shear stress and its
evolution, which are accounted for in a phenomenological manner by measured
hardening behaviors for continuum plasticity. Meanwhile, crystal plasticity quantitatively addresses the effect of polycrystalline structures of metals in an average
sense, which will also be briefly reviewed in Appendix.
HW #4.1
Referring to any physical metallurgy textbook, briefly review crystal structures of
metals and their imperfections.
62
4 Physical Plasticity
References
Chung, K., Ahn, K., Yoo, D. H., Chung, K. H., Seo, M. H., & Park, S. H. (2011). Formability of
TWIP (twinning induced plasticity) automotive sheets. International Journal of Plasticity, 27,
52–81.
Frenkel, J. (1926). Zur Theorie der Elastizitätsgrenze und der Festigkeit kristallinischer Körper.
Zeitschrift für Physik, 37, 572–609.
Hensel, A., & S, T. (1979). Kraft- und Arbeitsbedarf bildsamer Formgebungsverfahren. Leipzig:
VEB Deutscher Verlag für Grundstoffindustrie.
Lee, M.-G., Wagoner, R., Lee, J., Chung, K., & Kim, H. (2008). Constitutive modeling for
anisotropic/asymmetric hardening behavior of magnesium alloy sheets. International Journal
of Plasticity, 24, 545–582.
Meyers, M. A., & Chawla, K. K. (2009). Mechanical behavior of materials. Cambridge:
Cambridge University Press.
Orowan, E. (1949). Fracture and strength of solids. Reports on Progress in Physics, 12, 185.
Reed-Hill, R. E., & Abbaschian, R. (1973). Physical metallurgy principles.
William D. Callister, D. G. R. (2013). Materials science and engineering: An introduction.
Chapter 5
Deformation of Heterogeneous
Structures
As previously discussed, plastic deformation occurs by dislocation sliding or
twinning, driven by shear stress; however, dislocation sliding is predominant at
room temperature for most metals with a few exceptions. As for the shear stress to
induce the plastic deformation, known as the critical shear stress, its true magnitude is much lower than the theoretical value, with sliding facilitated by dislocations, on a single crystal level. The shear stress is simplified to be elasto-perfect
plastic, without hardening, as shown in Fig. 5.1, despite the fact that the stress itself
hardens (or increases) to drive sustained plastic deformation due to point, line and
surface defects interfering dislocation sliding.
This simplified single crystal behavior is quite different from that of polycrystalline metals illustrated in Figs. 2.4 and 5.2, in which gradual hardening after the
initial yielding and the Bauschinger behavior during unloading are prominent.
These differences are attributed to the heterogeneous structure of polycrystalline
metals, in which some grains deform more easily than others because of their
favorable orientations within the slip system relative to the applied external force, as
analyzed here. In addition to polycrystalline structures, the presence of second
phase particles (or precipitates) within a single crystal also contributes to the
heterogeneity of structures, especially for the Bauschinger behavior.
In this analysis, a polycrystalline structure under a simple tension test is considered. To represent the grains with favorable and unfavorable orientations,
respectively, a simplified heterogeneous structure with two members is assumed as
shown in Fig. 5.3. Here, each member has the same simplified single crystal
property, the elasto-perfect plasticity.
In Fig. 5.3, which shows the side cross-sectional and top views of the structure,
Member 1 is the circular cylinder positioned at the core and surrounded by Member
2, which is a hollow cylinder. The initial lengths and cross-sectional areas of
Members 1 and 2 are ‘, A, a‘ and bA, respectively, assuming that a; b [ 1:0 for
simplicity. To analyze the relationship between the external force F and the
deformation of the structure d, consider the following:
© Springer Nature Singapore Pte Ltd. 2018
K. Chung and M.-G. Lee, Basics of Continuum Plasticity,
https://doi.org/10.1007/978-981-10-8306-8_5
63
64
5 Deformation of Heterogeneous Structures
σ
Y
Y
E
ε
Fig. 5.1 The elasto-perfect plasticity assumed for a single crystal
Fig. 5.2 Hardening and Bauschinger behaviors of polycrystalline metals
Fig. 5.3 Two-member heterogeneous structure under simple tension a side view and b top view
5 Deformation of Heterogeneous Structures
65
1. Force equilibrium condition
F ¼ F1 þ F2
ð5:1Þ
d ¼ d1 ¼ d2
ð5:2Þ
2. Geometric compatibility
3. Kinematics (infinitesimal deformation theory)
d
d
e1 ¼ ; e2 ¼
‘
a‘
ð5:3Þ
4. Constitutive law: elasto-perfect plasticity with the yield stress Y and Young’s
modulus E as shown in Fig. 5.1.
Within the elastic limit,
d1
d
d2
d
¼ E ; r2 ¼ Ee2 ¼ E ¼ E
‘
a‘
‘
a‘
d
d
b
F1 ¼ A1 r1 ¼ AE ; F2 ¼ A2 r2 ¼ ðbAÞðE Þ ¼ F1
‘
a‘
a
r1 ¼ Ee1 ¼ E
while
F2 ¼ F F1
Beyond the elastic limit,
d
dY
r1 ¼ E ! Y ¼ EeY1 ¼ E 1 ;
‘
‘
dY1 ¼
Y‘
E
66
5 Deformation of Heterogeneous Structures
r2 ¼ E
d
dY
! Y ¼ EeY2 ¼ E 2 ;
a‘
a‘
dY2 ¼
aY‘
¼ adY1
E
ða [ 1 ! dY2 [ dY1 Þ
F1 ¼ A1 r1 ¼ AE
¼ AY
d
‘
b
d
F2 ¼ A2 r2 ¼ AE
a
‘
¼ bAY
(For d\dY1 ,
5.1
F2
F1
Loading
¼ ba)
ðfor d\dY1 Þ
ðfor dY1 \dÞ
ðfor d\dY2 Þ
ðfor dY2 \dÞ
5.1 Loading
67
1. Points 1 * 2 (0 d dY1 ): both members are elastic,
b
F2 ¼ F1
a
F ¼ F1 þ F2 ¼ AE
d b
d
d
b
þ AE ¼ AE ð1 þ Þ
‘
a
‘
‘
a
dF AE
b
¼
ð1 þ Þ
dd
‘
a
At Point 2:
F 2 ¼ F12 þ F22 ¼ AY þ
b
AY
a
b
¼ AYð1 þ Þ
a
2. Points 2 * 3 (dY1 d dY2 ): member 1 is plastic and member 2 is elastic
F ¼ F1 þ F2 ¼ AY þ
dF bAE
¼
dd
a‘
b
d
AE
a
‘
68
5 Deformation of Heterogeneous Structures
At Point 3:
F 3 ¼ F13 þ F23 ¼ AY þ bAY
¼ AYð1 þ bÞ
3. Points 3 * 4 (dY2 d): both members are plastic,
F ¼ F1 þ F2 ¼ AY þ bAY ¼ AYð1 þ bÞ
dF
¼0
dd
5.2
Unloading
b
2
4. Points 4 * 8 (AY F1 AY): both members are in the elastic range, DF
DF1 ¼ a
At Point 5: F15 ¼ 0
5.2 Unloading
69
DF2 bAY F25 bAY F25 b
¼
¼
¼
a
DF1
AY
AY F15
1
F25 ¼ bð1 ÞAY
a
1
)F 5 ¼ F15 þ F25 ¼ bð1 ÞAY
a
At Point 6: F 6 ¼ 0 $ F16 ¼ F26
DF2 bAY F26 bAY þ F16 b
¼
¼
¼
a
DF1
AY F16
AY F16
bAYð1 aÞ
)F16 ¼
¼ F26
aþb
F16 and F26 are the residual forces here
70
5 Deformation of Heterogeneous Structures
At Point 7: F27 ¼ 0
DF2 bAY F27
bAY
b
¼
¼
¼
7
7
DF1
AY F1 a
AY F1
)F17 ¼ AYð1 aÞ ¼ F 7
At Point 8: F18 ¼ AY
DF2 bAY F28 bAY F28 b
¼
¼
¼
a
DF1
2AY
AY F18
2
F28 ¼ AYð1 Þb
a
2b
8
8
1Þ
)F ¼ F1 þ F28 ¼ AYðb a
5. Point 8 * 9: member 1 is plastic and member 2 is elastic, F1 ¼ AY
At Point 9: F29 ¼ bAY
)F 9 ¼ F19 þ F29 ¼ AYð1 þ bÞ
The analysis shows that the relationship between force and deformation or
between engineering stress and strain, qualitatively comply with typical measured
test results well, which are schematically illustrated in Fig. 5.2 for polycrystalline
metals, as summarized here:
(1) During initial loading and unloading, all members are elastic and the elastic
slope is the same.
(2) After the initial yielding at Points 2 and 8, not all members are plastic until
force reaches Points 3 and 9, suggesting that plastic deformation propagates
from one grain to another after the initial yielding, during which the material
gradually hardens on the global level.
(3) The magnitude of F 4 is larger than that of F 8 , accounting for the Bauschinger
behavior.
5.2 Unloading
71
Fig. 5.4 Continuous hardening of a multi-member heterogeneous structure
(4) The magnitude of the difference between F 4 and F 8 is twice as large as F 2 (this
is not usually the case for measured data, unlike the results of the analysis,
because of hardening behavior in the single crystal level).
(5) The magnitude of F 3 is the same as that of F 9 .
(6) Increasing the members of heterogeneous structures would lead to more realistic continuous hardening behavior during loading and unloading as
schematically shown in Fig. 5.4.
HW #5.1
1. For the heterogeneous structure considered in Fig. 5.3, plot the ðF1 ; F2 Þ diagram
and the ðF; dÞ diagram (1) for loading tension up to ða þ2 1Þ dY1 and unloading
(2) for reloading after unloading half way between Points 8 and 9 (3) for
reloading after full unloading at Point 9.
2. Consider the pin jointed structure shown below. The rods are all of cross-section A,
Young’s modulus E and yield stress Y. Find the elastic limit load Fe and the collapse
(or maximum) load Fc . After Fc has been reached, the load is reduced to zero and
then changes sign. At what load does plastic flow in compression set in? Assume
that buckling of the rods in compression is prevented and deformation is
infinitesimal.
Chapter 6
Pure Bending and Beam Theory
The deflection of a beam, defined as a uniform long straight slender bar under
transverse loading, is discussed here. Note that the discussion here is all based on
the one-dimensional isotropic constitutive law of elasto-perfect plasticity.
6.1
Pure Bending (or Simple Bending)
In beam theory, the pure bending theory is extensively utilized; however, note that
the pure bending theory is important as a separate topic since it deals with the exact
analytic solution of the linear isotropic elasticity with infinitesimal deformation.
Meanwhile beam theory is an approximate solution even for the infinitesimal
elasticity solution (known as the formulation for strength of materials).
In pure bending theory, a straight uniform prismatic bar is subjected to resultant
moments at two ends without resultant forces (refer to HW #1.4 for their definitions), while lateral surfaces are traction-free. The bar is not necessarily slender and
may have an arbitrary uniform cross-sectional shape. The infinitesimal elastic
solution is extended here for an approximate elasto-plasticity solution with finite
deformation.
The solution procedure is to assume that vertical planes remain vertical to curved
outer lateral surfaces and inner planes (parallel to outer, upper and bottom surfaces)
after deformation as shown in Fig. 6.1, regardless of material properties with isotropy (therefore, commonly applicable for elastic, viscoelastic and plastic materials
with isotropy and infinitesimal deformation). The cross-section is assumed to be
rectangular for simplicity (with the width of ‘b’ and the height of ‘2h’).
In Fig. 6.1, there exists a neutral plane, which does not change its length after
bending and the origin of the coordinate system is positioned at the middle of the
neutral plane. However, the exact vertical position of the neutral plane in the
cross-section is unknown in advance. Now,
© Springer Nature Singapore Pte Ltd. 2018
K. Chung and M.-G. Lee, Basics of Continuum Plasticity,
https://doi.org/10.1007/978-981-10-8306-8_6
73
74
6 Pure Bending and Beam Theory
y
y
2h
z
o
x
b
Cross-section
Mz
Mz
Δθ
R
y
Neutral line
0
Fig. 6.1 The schematic view of the bar under the pure bending
‘0 ¼ RDh;
‘ ¼ ðR yÞDh
ð6:1Þ
Therefore,
ex ¼
D‘
yDh
y
¼ ¼ yK
¼
‘0
RDh
R
ð6:2Þ
where R and K are the radius of curvature and the curvature of the neutral plane,
respectively. The relationship between the bending moment, Mz, and the bending
curvature during initial bending and reverse bending under the pure bending condition is analyzed here.
6.1.1
Initial Bending
Within the elastic limit,
(1) Kinematics:
eð¼ ex Þ ¼ Ry ¼ yK, ðe ¼ 0 at the neutral plane ðy ¼ 0ÞÞ
6.1 Pure Bending (or Simple Bending)
75
(2) Constitutive law:
rð¼ rx Þ ¼ Ee ¼ E
y
¼ EyK
R
ð6:3Þ
(3) Equilibrium conditions for resultant moment and resultant force at two ends:
Fð¼ Fx Þ ¼ 0; Mð¼ Mz Þ 6¼ 0; therefore,
Z
F¼
Z
rdA ¼ y
E
E dA ¼ R
R
Z
Z
ydA ¼0 !
ydA ¼0
ð6:4Þ
which implies that the neutral plane is the centroidal plane; therefore, the origin
of the coordinate system is commonly positioned at the centroid of the
cross-section conveniently as shown in Fig. 6.1. Now,
Z
M¼
E
rydA ¼
R
Z
y2 dA ¼
EI
2Ebh3 K
ð¼ EIK ¼
Þ
R
3
ð6:5Þ
where the second moment of the cross-section, I, becomes, for the rectangular
cross-section shown in Fig. 6.1,
Zh
I¼
Zh
y dA ¼
by2 dy ¼
2
h
h
2bh3
3
ð6:6Þ
Beyond the elastic limit,
(1) Kinematics is the same with Eq. (6.2).
(2) Constitutive law is the elasto-perfect plasticity.
As illustrated in Fig. 6.2, the elastic limits of strain, bending curvature and the
radius of bending curvature are obtained when the stress reaches the yield stress Y
at the top and bottom edges of the cross-section during bending; i.e.,
ee ¼
Y
ðhÞ
1
Y
¼
¼ ðhÞKe and Ke ¼
¼
E
Re
Re Eh
ð6:7Þ
When bending goes beyond the elastic limit, boundaries of the elastic and plastic
ranges form as plastic deformation propagates from the top and bottom edges as
shown in Fig. 6.2. The location of the boundary becomes
n Ke
¼
for K Ke
h K
ð6:8Þ
76
6 Pure Bending and Beam Theory
Fig. 6.2 Stress distribution evolution in the cross-section of the beam during the initial bending
considering that
ee ¼
Y
¼ hKe ¼ nK
E
ð6:9Þ
Now, the stress distribution becomes, as shown in Fig. 6.3,
r¼
Y for n j yj h
Yn y for 0 j yj\n
ð6:10Þ
(3) Equilibrium conditions for resultant moment and resultant force at two ends:
Fð¼ Fx Þ ¼ 0;
Mð¼ Mz Þ 6¼ 0
The condition to have the resultant force vanish at two ends leads to
Z
F ¼ rdA ¼0
ð6:11Þ
which confirms that the force distribution shown in Eq. (6.10) is valid and that the
neutral plane is the centroidal plane when deformation is completely elastic. Note
6.1 Pure Bending (or Simple Bending)
77
Fig. 6.3 Stress distribution
in the cross-section of the
beam when bending is beyond
the elastic limit
that this conclusion is valid for a rectangular cross-section, which is symmetric with
respect to the z-axis.
As for the bending moment,
Z
M¼
Z
rydA ¼ 2
0
n
Y 2
y ðbdyÞ þ 2
n
Z
h
YyðbdyÞ
n
n2
Þ ðwhere 0 n hÞ
3
1 Ke
¼ bYh2 ð1 ð Þ2 Þ (where Ke K 1Þ
3 K
¼ bYðh2 ð6:12Þ
for which the bending moment of the elastic limit and the maximum bending
moment are (Fig. 6.4)
2
MðK ¼ Ke Þ ¼ Me ¼ bYh2
3
ð6:13Þ
2
MðK ¼ 1Þ ¼ Mc ¼ bYh
Since derivation here is based on the infinitesimal deformation theory, the
maximum moment is invalid in a strict sense but considered as a first approximation
for engineering purposes.
HW #6.1
The stress state in pure bending is the simple tension, accounting for traction-free
lateral surfaces. Therefore, within the elastic limit,
ez ð¼ ey Þ ¼ mex ¼ yðmKÞ
which represents one of the double curvatures that the neutral surface has in the y-z
plane, known as the anticlastic curvature, K anti ¼ mK, while the major curvature on
the x-y plane is K in Eq. (6.2). When bending goes beyond the elastic limit
(K > Ke), derive the following anticlastic curvature:
78
6 Pure Bending and Beam Theory
Fig. 6.4 The relation between the moment and the bending curvature as well as the evolution of
the boundary between the elastic and plastic ranges during the initial bending
K anti ¼ 0:5K þ
ðm 0:5ÞY
Eh
Here, assume that total strain is the sum of the elastic and plastic strains and also
that the isotropic linear elasticity is applicable for plastic strains with Poisson’s
ratio, m ¼ 0:5, to account for the incompressibility of plastic deformation. Note that
such an application of the linear elasticity with the incompressibility condition for
plasticity is generally invalid.
HW #6.2
For a cross-section which is not symmetric with respect to the z-axis, the neutral
plane is not the centroidal plane when deformation is beyond the elastic limit [to
simultaneously satisfy Eqs. (6.3) and (6.11)]. Derive the relationship between the
moment and the bending curvature for a triangular cross-section shown in Fig. 6.5
along with the evolutions of the neutral plane position and the boundary between
elastic and plastic ranges. When analytical solutions are not available, set up
equations to solve. For convenience, consider the bottom center of the triangle as
the origin of the coordinate system, taking care to modify Eq. (6.3) accordingly.
The relationship between the moment and the bending curvature during initial
bending, reverse bending and re-bending are plotted in Fig. 6.6. The relationship
for the initial bending previously derived is shown with Point 1, which is the elastic
limit, and Point 2.
y
2h
Fig. 6.5 A triangular
cross-section
o
b
z
6.1 Pure Bending (or Simple Bending)
79
(a)
(b)
Fig. 6.6 The relationship between the moment and the bending curvature during initial bending,
reverse bending and re-bending a when the initial bending is equal or larger than twice the elastic
limit ðK2 2Ke Þ and b when the initial bending is smaller than twice the elastic limit
ðKe \K2 \2Ke Þ
80
6 Pure Bending and Beam Theory
Fig. 6.7 The stress evolution during reverse bending in the upper half of the cross-section based
on the updated initial state
6.1.2
Reverse Bending
Reverse bending after initial bending covers Points 2 8, while re-bending is
performed at Point 6 in Fig. 6.6. Derivation of the relationship is carried out based
on the method of sequential superposition, in which the strain, stress and moment
during reverse bending (denoted with a prime) are obtained first based on the newly
updated initial state, Point 2, along with the new bending curvature, K′, with K′ = 0
at Point 2. They are then superposed to those values at Point 2. The sequential
superposition method here properly takes into account the deformation history for
plasticity and does not pursue the well-known superposition principle, which is
valid for the linear boundary value problem, as discussed in Chap. 2.
The stress evolution during reverse bending in the upper half of the cross-section
based on the updated initial state is illustrated in Fig. 6.7. Note that all material
elements in the upper half can be stretched to the yield stress Y, regardless of their
stress states at Point 2. Therefore, while it is in the plastic range at Point 2, the
element has a new yield stress for stretching, 2Y, based on the updated initial state, as
shown for Points 5 and 7 in Fig. 6.7. Consequently, the new elastic limit for reverse
bending based on the updated initial state becomes K′ = 2Ke (with M′e = 2Me) as
shown in Fig. 6.6. Such an analysis leads to that, when the initial bending is equal or
larger than twice the elastic limit ðK2 2Ke Þ, Point 6 for full unbending of the initial
bending (K = K2 − K′2 = 0) comes after the elastic limit of unbending as shown in
Fig. 6.6a, while, when the initial bending is smaller than twice the elastic limit
ðKe \K2 \2Ke Þ, Point 6 arrives during the elastic unbending as shown in Fig. 6.6b.
Therefore, derivations are considered for each case, separately, here.
Case 1: K2 2Ke
1. Points 1*2 ðKe K K2 with n2 n hÞ
6.1 Pure Bending (or Simple Bending)
81
Z
M1 2 ¼ Zn
rydA ¼ 2
Y 2
y ðbdyÞ þ 2
n
0
Zh
YyðbdyÞ
n
n2
1 Ke 2
Þ ¼ bYh2 ð1 ð
Þ Þ
3 K1 2
3
1 Ke
M2 ¼ bYh2 ð1 ð Þ2 Þ
3 K2
Ke
n
ee ¼ Ke h ¼ K1 2 n !
¼
K1 2 h
h
K2 ¼ Ke ðwhere 2Ke K2 1Þ
n2
¼ bYðh2 2. Points 2*5 ð0 K 0 2Ke ¼ Ke0 Þ
M20 5 ¼
2bYh2 0 2bYh2 0 2bEh3 0
K ¼
K
Y K ¼
3Ke
3
3ðEh
Þ
M2 5 ¼ M2 M20 5
and
r0 ¼ EyK 0
r2 5 ðyÞ ¼ r2 ðyÞ þ r02 5 ðyÞ
82
6 Pure Bending and Beam Theory
(1) Point 3 ðK30 ¼ Ke Þ
M30 ¼ Me ¼
2bYh2
3
M3 ¼ M2 M30
bYh2
Ke 2
1ð Þ
¼
3
K2
and
r3 ðyÞ ¼ r2 ðyÞ þ r03 ðyÞ
(represented by the shaded area in the figure)
(2) Point 4 ðM4 ¼ 0Þ
M4 ¼ M2 M40 ¼ 0
1 Ke
2Ebh3 K40
bYh2 ð1 ð Þ2 Þ ¼0
3 K2
3
3Y
1 Ke
ð1 ð Þ2 Þ
K40 ¼
2 Eh
3 K2
r4 ðyÞ ¼ r2 ðyÞ þ r04 ðyÞ
6.1 Pure Bending (or Simple Bending)
83
0
2Y
(3) Point 5 ðK50 ¼ 2Ke ¼ Ke0 ¼ 2Y
Eh with ee ¼ 2ee ¼ E Þ
4Ebh3 Ke 4Ybh2
¼
¼ 2Me
3
3
2
Ybh
Ke
1 þ ð Þ2
M5 ¼ M2 M50 ¼ 3
K2
M50 ¼
Remark #6.1
0 0
1 Ke 2
2Y
0
0
(1) Here, 2K40 ¼ 3Y
Eh ð1 3 ðK2 Þ Þ [ Eh ¼ K5 ; therefore, M4 [ M5 M4 , which
is the Bauschinger effect in the moment-bending curvature curve, comparable
to that of the stress-strain curve shown in Fig. 2.4.
Y
, implies that when the initial bending moment is completely
(2) Also, K40 / Eh
released, the amount of curvature recovery is proportional to the yield stress
(Y) and inversely proportional to Young’s modulus (E) and thickness (h).
Additionally, as bending (K2) becomes larger, so does the recovery. The same
implication is applied for the curvature recovery of the moment (M6) after the
initial bending curvature is fully released (K1s and K2s to be derived below). This
will be further discussed in Chap. 17 relating to the springback of sheets
subjected to bending.
84
6 Pure Bending and Beam Theory
(3) Points 5*7 ð2Ke ¼ K50 K 0 K70 ¼ 2K2 with n2 g hÞ
M50 7
Zg
¼ 4bf
Y
ð yÞydy þ
g
0
¼ 2bYh2 f1 Zh
1 g
Yydyg ¼ 2bYh2 f1 ð Þ2 g
3 h
g
0
1 Ke 2
ð
Þ g
3 K50 7
¼ 2M1 2
M5 7 ¼ M2 M50 7
2Y
h
¼ gK50 7 ¼ hKe0 ! K50 7 ¼ Ke0
e0e ¼
E
g
(1) Point 6 ðK6 ¼ 0Þ
K6 ¼ K2 K60 ¼ 0; K60 ¼ K2 ð 2Ke Þ
1 Ke
1 2Ke 2
M6 ¼ M2 M60 ¼ bYh2 ð1 ð Þ2 Þ 2bYh2 ð1 ð
Þ Þ
3 K2
3 K2
7 Ke
¼ bYh2 ð1 ð Þ2
3 K2
6.1 Pure Bending (or Simple Bending)
85
Now, the curvature recovery of M6
3Y
7 Ke
jM6 j
ð1 ð Þ2 Þ
¼
3
2 Eh
3 K2
3 Ebh
KS1 ¼ 2
Point 7 ðK70 ¼ 2K2 ; g ¼ n2 Þ
M7 ¼ M2 M70 ¼ M2 2M2 ¼ M2
Remark 6.2 The M(K) relationship between Points 5 and 7 is twice the stretch of
the M(K) relationship between Points 1 and 2.
4. Points 7*8 ð0 g n2 Þ
M70 8
Zg
¼ 2bð
Zn2
r3 ydy þ
0
Zh
r2 ydy þ
g
r1 ydyÞ
n2
1 n
1 g
¼ 2bYh2 f1 ð 2 Þ2 ð Þ2 g
6 h
6 h
1 Ke 2 1
K0
2
¼ 2bYh f1 ð Þ ð 0 e
Þ2 g
6 K2
6 2K7 8 K70
86
6 Pure Bending and Beam Theory
ðConsidering
with h ¼
Y
Y
g + Y = EgK70 8 ; g ¼
n2
EðK70 8 EnY 2 Þ
2Y
and K70 ¼ 2K2
EKe0
K2 n2 ¼ Ke h ¼
Y
E
g
Ke0
Ke0
Ke0
¼
¼
¼
0
0
Y
0
K
h 2ðK7 8 En2 Þ 2ðK 0 7 Þ 2K7 8 K70
78
2
M7 8 ¼ M2 M70 8
(1) Point 7 ðK70 ¼ 2K2 ; g ¼ n2 Þ
1 Ke
M70 ¼ 2bYh2 f1 ð Þ2 g ¼ 2M2
3 K2
ðTherefore; the result is consistent)
6.1 Pure Bending (or Simple Bending)
87
(2) Point 8 ðK80 ¼ 1; g ! 0Þ
1 Ke
M80 ¼ 2bYh2 ð1 ð Þ2 Þ
6 K2
M8 ¼ M2 M80 ¼ bYh2
K8 ¼ K2 K80 ¼ 1
Case 2: Ke K2 2Ke
Here, the main difference from Case 1 is that Point 6 for the full recovery of the
initial bending curvature occurs during elastic unloading from the initial bending.
All relationships derived for Case 1 are also valid for Case 2, otherwise:
K60 ¼ K2
M60 ¼
2Ebh3 K60 2Ebh3 K2
¼
3
3
1 Ke
2Ebh3 K2
M6 ð 0Þ ¼ M2 M60 ¼ bYh2 f1 ð Þ2 g 3 K2
3
M
3
Y
1
K
j
j
6
e
f1 ð Þ2 g ¼ K2 K40
KS2 ¼ 2
¼ K2 3
2 Eh
3 K2
3 Ebh
88
6.2
6 Pure Bending and Beam Theory
Beam Theory
Beam theory provides a method to calculate the deflection of a beam (defined here
as a long, slender, straight uniform bar under transverse loading). For simplicity, a
rectangular cross-section with isotropic properties is assumed here, even though
some of geometric assumptions such as the straight beam and its rectangular
cross-sectional shape can be released with added complexity in the solution
procedure.
There are two beam theories for the infinitesimal elastic solution: the
Timoshenko beam theory and the Euler-Bernoulli beam theory. Even though the
pure bending theory is extensively utilized in beam theory, the beam is subjected to
a bending moment as well as shear force, unlike the beam in the pure bending
theory. The Timoshenko beam theory is a more rigorous beam theory that takes into
account both the moment and shear force to calculate the deflection. However,
when the beam is long and slender, while the property is approximately isotropic, as
considered here, the contribution by shear force is negligible so that deflection is
obtained considering only the bending moment, assuming the pure bending theory:
the Euler-Bernoulli beam theory as a subset of the Timoshenko theory. When the
beam becomes thicker and/or shorter or the shear modulus becomes too small, the
Euler-Bernoulli theory is not valid anymore. Here, the Euler-Bernoulli beam theory
for the infinitesimal elasticity is applied to plasticity based on the elasto-perfect
plasticity for a first order finite deformation solution.
As mentioned earlier, the beam theory is an approximation, unlike the pure
bending theory for infinitesimal deformation, based on the formulation for strength
of materials. One distinctive nature of this formulation is that, considering the thin
structure, the stress distribution in thickness is represented by the resultant stress
and moment, which is discussed in HW #1.4, and Newton’s equilibrium conditions,
kinematics and the constitutive law are expressed with these resultant measures
along with the bending curvature and the deflection of the beam, replacing those 15
equations in Eqs. (1.27), (1.28), (1.29) and (1.30) for the linear elasticity. The
formulation based on the resultant measures for the beam theory is extended also
for two-dimensional and three-dimensional thin structures shown in Fig. 6.8 in the
plate and shell theories, respectively (Fig. 6.9).
Beam
Plate
Shell
Fig. 6.8 1-D, 2-D and 3-D thin structures considered in the beam, plate and shell theories
6.2 Beam Theory
89
HW #6.3
Resultant force and moment for a beam with symmetric cross-sections
In beam theory simplified here, the beam has a symmetric cross-section with respect
to the y-axis, while the origin of the coordinate system is positioned at the centroid
of the cross-section, and it is loaded along the y-axis with w(x), load intensity per
length. For such a case, stress distributions at the cross-section are symmetric with
respect to the y-axis as schematically illustrated in Fig. 6.9. Now, confirm that,
among the three force components and three moment components (with respect to
the origin), only Fx, Fy and Mz are non-vanishing. Among these three, Fx is assumed
to be vanishing here for simplicity. Furthermore, Fy = −V as a resultant shear force
and Mz = M as a resultant moment as illustrated in Fig. 6.10.
Fig. 6.9 Schematic view of the symmetric stress distribution for a beam with a symmetric
cross-section
Fig. 6.10 The resultant moment M(x), shear force V(x) and load intensity per length w(x) with
their positive sign convention
90
6 Pure Bending and Beam Theory
1. Equilibrium conditions for the beam
As for the force equilibrium, Vðx þ dxÞ þ wdx ¼ VðxÞ þ dV þ wdx ¼ VðxÞ in
Fig. 6.10; therefore,
wðxÞ ¼ dV
dx
ð6:14Þ
As for the moment equilibrium (with respect to the center just for convenience)
dx
dx
dx
in Fig. 6.10, VðxÞ dx
2 þ Vðx þ dxÞ 2 ¼ VðxÞ 2 þ ðVðxÞ þ dVÞ 2 ¼ Mðx þ dxÞ
MðxÞ ¼ dM; therefore,
VðxÞ ¼
dM
dx
ð6:15Þ
Remark #6.3
(1) The resultant moment is reference-sensitive with a non-vanishing resultant
force as discussed in HW #1.4 and it becomes reference-insensitive with a
vanishing resultant force. In deriving Eq. (6.15), the resultant force is vanishing
in Fig. 6.10; therefore, selecting the center as the reference point here is just for
convenience and the same result, Eq. (6.15), can be obtained for any other
reference point. On the other hand, the resultant moment for Fig. 6.10 is sensitive to reference since the resultant force is not vanishing in general.
Therefore, the conclusion in HW #6.3, that only Mz is non-vanishing among
three moment components is valid for that particular coordinate system.
However, if Fx is assumed to vanish, the amount Mz is insensitive to the
location of the origin of the coordinate system as is the case for the moment for
the pure bending. Note that the non-vanishing Fz does not affect Mz here.
(2) Note that the signs in Eqs. (6.14) and (6.15) are dependent on the sign convention of M, V and w; therefore, the current result is valid for the sign convention defined in Fig. 6.10.
2. Kinematics: infinitesimal deformation theory
Kð¼
d 2 v=dx2
f1 þ ðdv=dxÞ2 g
Þ
3=2
d2v
dx2
ð6:16Þ
6.2 Beam Theory
91
where K is the bending curvature and v is the deflection of the beam, which is
generally negative with the positive w defined in Fig. 6.10. Equation (6.16) is
applied here even for finite deformation for a first order approximate solution.
3. Constitutive law based on the one-dimensional elasto-perfect plasticity: the
entire relationship between M and the bending curvature K derived for the pure
bending theory as shown in Fig. 6.6.
For linear elasticity, the constitutive law is M = EIK; therefore, considering
Eqs. (6.14), (6.15) and (6.16) leads to
wðxÞð¼ dV
d2 M
d4v
¼ 2 Þ ¼ EI 4
dx
dx
dx
ð6:17Þ
The elasto-perfect plastic version of Eq. (6.17) becomes
wðxÞð¼ dV
d2 M
d2f
d2f d2 v
¼ 2 Þ ¼ 2 ðKðxÞÞ ¼ 2 ð 2 ðxÞÞ
dx
dx
dx
dx dx
ð6:18Þ
where the relationship between M and K is M = f(K). Equations (6.17) and (6.18)
are 4th order ordinary differential equations for the deflection v(x), when the load
intensity w(x) is prescribed with boundary conditions on v and dv=dx as well
d 2 v=dx2 as d 3 v=dx3 , which are related to M and V, respectively. The procedure to
solve differential equations in Eqs. (6.17) and (6.18) is often mathematically
cumbersome. Therefore, the following standard procedure which consists of three
stages is commonly executed to solve for the beam deflection for elasticity as well
as elasto-plasticity:
In the first stage, the two equilibrium conditions on force and moment are
applied to determine V(x) and M(x) for a given w(x). If it is successful, it is
categorized as a SD (statically determinate) problem. If not, it is a SI (statically
indeterminate) problem. For exercise purposes, SD cases are more common in
textbooks, while SI cases are more common in reality. In the second stage, the
moment-curvature relationship obtained from the pure bending theory for elasticity
or elasto-plasticity is applied to determine the bending curvature K(x). Then, in the
third stage, Eq. (6.16) is applied to set up the differential equation for the deflection
v(x) with boundary conditions on v and dv=dx. For the SD case, M(x) is explicitly
obtained in the first stage and there are enough boundary conditions for the differential equation in the third stage to uniquely determine the deflection. For the SI
case, M(x) is not fully determined but involves several numbers of unknown
quantities in the first stage. However, there are added boundary conditions for the SI
case in the third stage such that the deflection is uniquely determined with added
boundary conditions. The procedure will be further discussed with examples later.
92
6 Pure Bending and Beam Theory
As for the way to determine V(x) and M(x) for a given w(x) in the first stage,
there are two methods. The one is to directly integrate two equilibrium equations on
force and moment, Eqs. (6.14) and (6.15), considering boundary conditions on
V (=dM/dx) and M; i.e.,
d2M
¼ wðxÞ
dx2
ð6:19Þ
This method is also somewhat mathematically cumbersome; therefore, a more
common practice is based on a second approach. In the second approach, the two
equations are applied to solve for two boundary reaction forces and/or moments
such as two reaction forces R1 and R2 for a simply supported beam and M and V at
the wall in the case of a cantilever beam as shown in Fig. 6.11. M(x) and V(x) are
solved sequentially by applying the two equilibrium conditions for the free-body
diagram, which involves the boundary reaction force/moment and w(x). For the SD
case, there are only two boundary reaction quantities so that M(X) and V(x) are
explicitly solved in the first stage. For the SI case, there are more than two boundary
reaction quantities to solve, counted as redundancy; therefore, explicitly solving
M(x) and V(x) in the first stage alone is not feasible so that the solution procedure
involves material properties and kinematics as well as the simultaneous solution of
v(x) through all three stages.
HW #6.4
For the following four typical SD beam problems, derive the deflection for isotropic
linear elasticity following the standard procedure, considering the boundary conditions described in Fig. 6.11. Try both approaches to obtain M(x) in the first stage
based on direct integration of two equilibrium relationships as well as the free-body
diagram along with boundary reaction force/moment. Note that the point force
P here is one kind of load intensity w(x), which can be conveniently represented by
pdðx ¼ x0 Þ for mathematical manipulation [using the Dirac delta function,
dðx ¼ x0 Þ].
Fig. 6.11 Two typical boundary conditions for the beam theory
6.2 Beam Theory
93
0xa
P 3
ðx 3x2 aÞ
v¼
6EI
ax‘
P
½ðx aÞ3 þ x3 3x2 a
v¼
6EI
94
6 Pure Bending and Beam Theory
v¼
w 0 x2
ðx2 6‘2 þ 4‘xÞ
24EI
0xa
Pb 3
½x ð‘2 b2 Þx
v¼
6‘EI
ax‘
Pb 3 ‘
½x ðx aÞ3 ð‘2 b2 Þx
v¼
6‘EI
b
v¼
w0 x
ð‘3 þ 2‘x2 x3 Þ
24EI
Now, consider the following simply supported SD beam problem for
elasto-perfect plasticity as an exercise.
EX #6.1
6.2 Beam Theory
95
Considering the two equilibrium conditions, Eqs. (6.14) and (6.15),
V ¼ w0 x þ C1
at x ¼ ‘; V ¼ w0 ‘ )C1 ¼ 0
V ¼ w0 x
Z
M¼
¼
Vdx þ C2
w0 2
x þ C2
2
at x ¼ ‘; M ¼ 0 )C2 ¼
w0 2
‘
2
w0 2
ð‘ x2 Þ
2
which is valid for any material as a SD problem
M¼
at x ¼ 0;
we 2 2
4 bYh2
‘ ¼ bYh2 ; therefore; we ¼
3
3 ‘2
2
wc
2bYh2 3
Mc ¼ ‘2 ¼ bYh2 ; therefore; wc ¼
¼ we
2
2
‘2
where
Me ¼
0 w0 we : Elastic range
we w0 wc : Elasto-plastic range
As for the distribution of the boundary between the elastic and plastic ranges, the
relationship between nh and x‘ is derived here. Considering,
MðxÞ ¼
while
w0 2
awc 2
1 n
ð‘ x2 Þ ¼
ð‘ x2 Þ ¼ bYh2 ð1 ð Þ2 Þ
3 h
2
2
ð6:20Þ
2
2bYh2
a 1 and wc ¼
3
‘2
leads to the following hyperbolic equation:
1
n
a x2
ð Þ2 ð Þ ¼1
3ð1 aÞ h
1a ‘
ð6:21Þ
which converges to linear lines, when a ¼ 1,
pffiffiffiffiffi x
n
¼ 3að Þ
h
‘
ð6:22Þ
96
6 Pure Bending and Beam Theory
The boundary intersects with the nh-axis ðwith x‘ ¼ 0Þ and nh ¼ 1 at nh ¼
qffiffiffiffiffiffiffiffi
pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
n 3ð1 aÞ and x‘ ¼ 3a2
3a , respectively. Therefore, h becomes 1.0 and 0.0
x pffiffiffi
for a = 2/3 and 1, respectively, while becomes 0.0 and 1= 3 for a ¼ 2=3 and 1,
‘
respectively. Note that, when the beam is supposed to collapse with wc, a significant
portion of the beam still remains in the elastic range.
As for the deflection of the beam based on the Euler-Bernoulli beam theory, the
M and K relationship shown in Fig. 6.4 is considered for each zone with the elastic
deformation and plastic deformation, respectively. For the elastic zone,
ffiffiffiffiffiffiffiffi
x x q3a2
awc 2
d2 v
2
¼
‘
3a and M ¼ 2 ð‘ x Þ ¼ EIK ¼ EI dx2 , leading to
‘
d 2 v awc 2
3aY
x2
2
ð1
ð‘
¼
x
Þ
¼
Þ
dx2 2EI
2Eh
‘2
ð6:23Þ
while, for the plastic zone,
ffiffiffiffiffiffiffiffi
x x q3a2
awc 2
1 Ke 2
2
2
¼
‘
3a and M ¼ 2 ð‘ x Þ ¼ bYh ð1 3 ð K Þ Þ, leading to
‘
d2v
Ke
Y
¼ qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi ¼ qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
ð6:24Þ
dx2
x 2
3ð1 að1 ð Þ ÞÞ Eh 3ð1 að1 ðxÞ2 ÞÞ
‘
‘
When the deflection is taken care of for 0 x ‘, considering the symmetry of
this beam, the two second order linear differential equations involve four integral
constants, which are solved considering the following four boundary conditions:
vðx ¼ ‘Þ ¼ 0;
dv
ðx ¼ 0Þ ¼ 0
dx
and the continuity of v and dv/dx at x = x*. The solutions are
rffiffiffiffiffiffiffiffiffiffiffiffiffiffi
x x
3a 2
ðiÞ ¼
‘
3a
‘
pffiffiffiffiffi Y ‘ 3a 3a ‘2 2
1 4
5 4
pffiffiffiffiffi
x
‘
x
v¼
Eh 3a 2‘3
12
12
2
!
#
pffiffiffiffiffiffiffiffiffiffiffiffiffiffi!
pffiffiffiffiffiffiffiffiffiffiffiffiffiffi ð3a þ 1Þ
1 þ 3a 2
þ ln pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi 3a 2
ðx ‘Þ
3
3ð 1 aÞ
rffiffiffiffiffiffiffiffiffiffiffiffiffiffi
x x
3a 2
ðiiÞ 0 ¼
‘
3a
‘
ð6:25Þ
6.2 Beam Theory
"
pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi! pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
pffiffiffi
aðx2 ‘2 Þ þ ‘2
ax þ aðx2 ‘2 Þ þ ‘2
Y ‘
pffiffiffiffiffi x ln
pffiffiffiffiffiffiffiffiffiffiffi
pffiffiffi
v¼
Eh 3a
a
‘ 1a
!#
pffiffiffiffiffiffiffiffiffiffiffiffiffiffi!
1 þ 3a 2
ð3a þ 1Þ pffiffiffiffiffiffiffiffiffiffiffiffiffiffi 1 2a2 pffiffiffiffiffi
3a 2 þ
3a
‘ ln pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi þ
3
2a
3ð 1 aÞ
97
ð6:26Þ
and
" pffiffiffiffiffiffiffiffiffiffiffi
pffiffiffiffiffiffiffiffiffiffiffiffiffiffi!
1a
Y ‘2
1 þ 3a 2
pffiffiffiffiffi pffiffiffi ln pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
vðx ¼ 0Þ ¼
Eh 3a
a
3ð1 aÞ
ð3a þ 1Þ pffiffiffiffiffiffiffiffiffiffiffiffiffiffi 1 2a2 pffiffiffiffiffi
3a 2 þ
þ
3a
3
2a
ð6:27Þ
pffiffi
2
Y p‘ffiffiffi
ffi 5122 . The deflection at the center of the beam
with ve ðx ¼ 0; a ¼ 2=3Þ ¼ Eh
3a
rapidly increases during loading until the beam collapses with a ¼ 1, as shown in
Fig. 6.12.
HW #6.5
Derive Eqs. (6.23), (6.24) and (6.26).
HW #6.6
For the three SD beam problems considered in HW #6.4 (a), (b) and (c), (1) derive
Pe, Pc or we, wc (2) derive the distribution of the boundary between the elastic and
plastic ranges (3) derive the beam deflection when loading is beyond the elastic
limit.
Fig. 6.12 Deflection at the
center of the beam during
loading until the beam
collapses with a ¼ 1
98
6 Pure Bending and Beam Theory
Fig. 6.13 Elastic recovery of
curvatures during unloading
for SD beams
(a)
(b)
Now, consider the deflection of the beam after unloading once the beam
develops plastic deformation. Note that M vanishes everywhere when w vanishes
for all SD beams by the conditions of equilibrium. For such cases, residual
deflection after unloading is determined from a new curvature distribution considering elastic unloading everywhere, as illustrated in Fig. 6.13.
The new curvature distribution after elastic unloading becomes
d2 v
M0
MðxÞ
0
ð6:28Þ
¼ KðxÞ ¼
KðxÞ
DK
ðxÞ
¼
KðxÞ
dx2
EI
EI
2
Therefore, for the elastic zone for x‘ x‘ , K ¼ DK 0 so that ddx2v ¼ 0. As for the
x x
M
2
2
c
¼ aw
plastic zone for 0 ‘ ‘ , DK 0 ¼ EI
2EI ð‘ x Þ so that
d2v
Y
awc 2
ð‘ x2 Þ
¼ qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi dx2 Eh 3ð1 að1 ðxÞ2 ÞÞ 2EI
‘
0
1
¼
Y B
1
3
x2 C
@qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi að1 2 ÞA
Eh
‘
3ð1 að1 ðxÞ2 ÞÞ 2
ð6:29Þ
‘
The unloaded beam shares the same boundary conditions with those of the
loaded beam.
HW #6.7
Derive the unloaded deflection after the beam is loaded beyond the elastic limit.
Remark #6.4 As for the residual stress after unloading, stress vanishes within the
elastic zone, while, for plastic stress, the stress distribution for Points 4 in Fig. 6.6
remains, which is obtained considering the distribution of K(x) for a specified value.
Figure 6.14 shows the schematic view of the residual stress in the plastic zone.
6.3 Limit Analysis
99
Fig. 6.14 The schematic
view of the residual stress in
the plastic zone of the
unleaded beam
6.3
Limit Analysis
The elastic limit of loading and the load for a beam to collapse are considered here
based on the distribution of moment, as an extension of the beam theory. The elastic
limit is obtained from the elastic analysis of the moment distribution. As for the
collapse loading, the beam needs enough hinges to develop in order for it to
collapse during loading. For example, in the case of a simply supported beam
shown in Fig. 6.11, the beam needs three hinges. In this case, however, the two
ends are pre-existing hinges, since the beam may rotate without resistance at each
end during loading. The last remaining hinge needed for the beam to collapse
develops somewhere within the beam, based on the moment distribution, as loading
reaches a certain magnitude. For the case discussed in the previous section, the third
hinge develops at the center when its moment becomes Mc as loading reaches wc, as
discussed in Fig. 6.12. As for the cantilever beam shown in Fig. 6.11, a hinge needs
to develop at the wall during loading.
EX #6.2
100
6 Pure Bending and Beam Theory
For demonstration purposes, consider a SD cantilever beam problem here. The
equilibrium conditions lead to the development of the linear piecewise distribution
of M(x), which is maximum at the wall with M ¼ P‘.
Therefore,
2bYh2
3‘
bYh2
3
¼¼ Pe
Pc ¼
2
‘
Pe ¼
(1) Statically determinate problems
For SD cases, the moment distribution is determined with the two equilibrium
conditions on force and moment. Note that the solution M(x) is independent of
material properties; therefore, it is valid both for elastic and elasto-plastic analysis.
Moreover, M(x) is often proportional to loading w(x) with proper boundary conditions for the moment, as observed in the four cases considered in HW #6.4.
For such cases, the elastic limit load becomes 2/3 of the collapse load.
(2) Statically indeterminate problems
As for SI problems, solving M(x) and V(x) involves material properties and kinematics as well as the simultaneous solution of v(x) for both elastic and elasto-plastic
analysis. Two SI beam problems are considered here as an exercise.
EX. #6.3
The beam has three boundary reaction quantities, M(0) and R1 at the wall and R2
at the free-end; therefore, its redundancy is 1. Note that there are also three kinematic boundary conditions related to these three reaction quantities, v = dv/dx = 0
at the wall and v = 0 at the other end. Meanwhile the SD cantilever beam considered in EX #6.2 has two reaction quantities, M(0) and R1 at the wall, with two
corresponding kinematic conditions, v = dv/dx = 0 at the wall. The one added
kinematic condition for this SI case here having redundancy = 1 ultimately allows a
unique solution.
For the elastic analysis, the two equilibrium conditions and kinematics in
Eq. (6.16) as well as the property, M = EIK, leads to the following equations:
6.3 Limit Analysis
101
P ¼ R1 þ R2
Mð0Þ þ P‘ 2R2 ‘ ¼ 0 ðwith respect to x ¼ 0 for convenienceÞ
Mð0Þ þ R1 x for 0 x ‘
d2v
MðxÞ ¼ EIK ¼ EI 2 ¼
dx
Mð0Þ þ P‘ þ ðR1 PÞx for ‘ x 2‘
Therefore,
(
vðxÞ ¼
Mð0Þ 2
R1 3
2EI x þ 6EI x þ C1 x þ C2 for
ðMð0Þ þ PlÞ 2
ðR1 PÞ 3
x þ 6EI x þ D1 x þ D2
2EI
0x‘
for ‘ x 2‘
which has seven unknowns, M(0), R1 and R2 with four integral constants, while
there are seven conditions such as the two equilibrium conditions and v = dv/dx = 0
at x ¼ 0 and v = 0 at x ¼ 2‘ as well as two continuity conditions for v and dv/dx at
P 2
P 3
‘ , D2 ¼ 6EI
l , R1 ¼ 11
x ¼ ‘. The seven solutions are C1 = C2 = 0, D1 ¼ 2EI
16 P.
5
3
R2 ¼ 16 P and Mð0Þ ¼ 8 P‘
Finally, the moment distribution becomes
M
5
P
16
0
2
x
3
P
8
For 0 x ‘
3
11
Px
MðxÞ ¼ Mð0Þ þ R1 x ¼ P‘ þ
8
16
For ‘ x 2‘
5
5
MðxÞ ¼ Mð0Þ þ P‘ þ ðR1 PÞx ¼ Px þ P‘
16
8
Ultimately, the maximum moment occurs at the wall and the elastic limit
2
becomes Pe ¼ 16bYh
9‘ .
Remark #6.5 The superposition method
Aside from the standard procedure, an alternative procedure based on the superposition principle discussed in Chap. 2 is also available for the elastic analysis of SI
problems. The method involves decomposing a SI problem into several SD problems and then superposing the results of the SD problems for the SI problem. When
the SD solutions are easily available, the superposition method is particularly
effective. This method is applied here for EX #6.3, utilizing the SD solutions
available in HW #6.4.
102
6 Pure Bending and Beam Theory
As for ðiÞ 0 x ‘
P 3
v¼
ðx 3x2 ‘Þ
6EI
ðiiÞ ‘ x 2‘
i
P h
ðx ‘Þ3 þ x3 3x2 ‘
v¼
6EI
As for ` 0 x 2‘
R2 3
v¼
x 6x2 ‘
6EI
As for þ `
ðiÞ 0 x ‘
1
ðPx3 R2 x3 3Px2 ‘ þ 6R2 x2 ‘Þ
v¼
6EI
ðiiÞ ‘ x 2‘
i R
P h
2
ðx ‘Þ3 þ x3 3x2 ‘ v¼
x3 6x2 ‘
6EI
6EI
The unknown R2 is solved from
the boundary condition at x ¼ 2‘; v ¼ 0 so that
6.3 Limit Analysis
103
R2 ¼
5
P;
16
R1 ¼
11
P
16
ðfrom P ¼ R1 þ R2 Þ
d2v
dx 2
2 d v
3
and Mð0Þ ¼ EI 2 ¼ P‘
dx
8
Now; MðxÞ ¼ EI
x¼0
As for the collapse load, the standard procedure for the elasto-plastic analysis
method is generally not as effective since the deflection is so complex to calculate,
meanwhile the superposition method is not applicable for nonlinear problems. The
collapse load can only be found by properly identifying the locations of hinges with
Mc by applying the equilibrium conditions; therefore, the solution procedure for the
collapse load is simpler than that of the elastic limit load for SI problems.
For this particular EX #6.3 case, considering the force equilibrium condition,
Eq. (6.14), the distribution of V(x) is constant with R1 (>0) in the left half of the
beam and constant with −R2 (<0) in the right half of the beam, for which
P = R1 + R2, as shown in the attached figure below. Now, using the moment
equilibrium condition, Eq. (6.15), the moment distribution linearly increases with a
slope of R1 on the left half and then linearly decreases with a slope of −R2 on the
right half, until the moment vanishes at the right end. Here, one of R1 and R2 is
unknown for this SI problem and, once this is determined, V(x) and M(x) are also
fully determined. This unknown is determined with kinematic conditions on
deflection, which requires complex calculations for the elasto-plastic analysis in
general.
However, the moment distribution at the instant of collapse can be determined
considering that the particular beam needs three hinges for collapse. As there is one
pre-existing hinge at the right end, two remaining hinges are required, for which the
moment is Mc. Two possible locations for the maximum moment are at the wall and
the center. Therefore, the moment distribution at the instant of collapse linearly
increases from −Mc to Mc between the wall and the center and then linearly
decreases between the center and the right end. Consequently, R1 ¼ 2M‘ c ¼ 2R2 and
2
27
3
Pc ¼ 3M‘ c ¼ 3bYh
‘ ¼ 16 Pe 6¼ 2 Pe .
The distributions of V(x), M(x) and the boundary between the elastic and plastic
ranges at the moment of collapse are shown here.
104
6 Pure Bending and Beam Theory
For the zone with plastic deformation:
For 0 x ‘
2Mc
x Mc jM j ¼ ‘
1 n2
2
¼ bYh 1 ð Þ
3 h
1 n
¼ M c 1 ð Þ2
3 h
For ‘ x 2‘
Mc
x þ 2Mc j M j ¼ ‘
6.3 Limit Analysis
105
1 n2
1 n2
¼ bYh 1 ð Þ ¼ Mc 1 ð Þ
3 h
3 h
2
x 1
For 0 ;
‘ 6
5 x
For 1;
6 ‘
x 4
For 1 ;
‘ 3
rffiffiffiffiffiffiffiffiffi
n
x
¼ 6ð Þ
h
‘
rffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
n
x
¼ 6ð1 Þ
h
‘
rffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
n
x
¼ 3ð 1Þ : All parabola
h
‘
EX #6.4
The beam here has cantilever beam boundary conditions at two ends; therefore,
there are four boundary reaction quantities: the moment M and the reaction force
R at the left and right ends. Considering symmetry for this particular beam, M and
R at the left and right ends are the same; however, the moment at the center is an
additional boundary reaction quantity. Therefore, the beam is an SI case with a
redundancy of 1. For the elastic analysis, the two equilibrium conditions and
kinematics in Eq. (6.16) as well as the property, M = EIK, leads to the following:
106
6 Pure Bending and Beam Theory
From the force equilibrium condition,
V ¼ w0 x þ C
and at x ¼ ‘; V ¼ w0 ‘ so that
V ¼ w0 x
From the moment equilibrium condition,
Z
M¼
Vdx þ C
w0 2
x þC
2
and at x ¼ ‘; M ¼ Mð‘Þ so that
w0 2
ð‘ x2 Þ
M ¼ Mð‘Þ þ
2
¼
Here, Mð‘Þ is unknown which is determined, considering the deflection.
The deflection is
d 2 v M Mð‘Þ w0 ‘2 w0 x2
¼
þ
¼
dx2 EI
EI
2EI
2EI
dv Mð‘Þ
w0 ‘2
w0 3
¼
xþ
x
x þ C1
dx
EI
2EI
6EI
Mð‘Þ 2 w0 ‘2 2
w0 4
x þ
x x þ C1 x þ C2
v¼
2EI
4EI
24EI
with the following boundary conditions for three unknowns, C1, C2 and Mð‘Þ:
vð‘Þ ¼
dv
dv
dv
ð‘Þ ¼ ðx ¼ 0Þ ¼ 0; ðor vð‘Þ ¼ ð‘Þ ¼ 0Þ
dx
dx
dx
w0 ‘
Therefore, C1 ¼ 0, C2 ¼ 24EI
and Mð‘Þ ¼ 13 w0 ‘2 , while
4
1
w0 2
ð‘ x2 Þ
MðxÞ ¼ w0 ‘2 þ
3
2
Consequently, the maximum moment occurs at the two walls and the elastic
2
limit becomes we ¼ ‘22 Mc ¼ 2bYh
‘2 .
Note that the beam here shares the same V(x) in EX #6.1 since both share the
same w(x). However, the moment distribution in EX #6.1 is fully determined from
the equilibrium conditions since the moment at the two ends is specified to vanish
as a SD problem, which is not the case here since the moment at the two ends is
unknown as a SI problem. For the derivation of the collapse load; however, the
moment at the two ends and the center becomes Mc, since three hinges for collapse
6.3 Limit Analysis
107
develop at those sites, considering the distribution of V(x). Therefore, the collapse
load is obtained from the moment equilibrium condition under the circumstance;
2
i.e., for the reference point at the left end, 2Mc ¼ wc2‘ ; therefore,
4bYh
3
c
wc ¼ 4M
‘2 ¼ ‘2 ¼ 2we 6¼ 2 we .
The distributions of V(x), M(x) and the boundary between the elastic and plastic
ranges at the moment of collapse are summarized here.
VðxÞ ¼ wc x ¼ MðxÞ ¼ 4Mc
x
‘2
2Mc 2
x þ Mc
‘2
108
6 Pure Bending and Beam Theory
Considering
2Mc
2
MðxÞ ¼ 2 x2 þ Mc ¼ Me ¼ Mc
3
‘
for the zones with the plastic deformation and
2Mc 2
1 n2
j M j ¼ 2 x Mc ¼ Mc 1 ð Þ
3 h
‘
1 n
x
1 ð Þ2 ¼ 2ð Þ2 1
3 h
‘
leads to
x r1ffiffiffi n
pffiffiffi x
For 0 ; ¼ 6ð Þ : linear line
‘
6 h
‘
rffiffiffi rffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
5 x
n
x 2
For
Þ : ellipse
\1; ¼ 6ð1 6 ‘
h
‘
HW #6.8
For the following four SI beams with the length of 2‘, obtain Pe or we , Pc or wc ,
VðxÞ, MðxÞ with their diagrams the moments of the elastic limit and collapse. Also
find nh ðxÞ along with their diagrams at the moment of collapse. The figures of V and
M here are the schematic view at the moment of collapse. As for the elastic limit,
apply the superposition method.
6.3 Limit Analysis
109
Hint for (b):
V(x) represents a linear line with two constants; therefore, M(x) is the quadratic
function with three constants, which are solved considering that M(x) = Mc at the
left end and at the point where V(x) = 0, while M vanishes at the right end.
Chapter 7
Torsion
Torsion of a cylindrical shaft is an important engineering problem especially since it
has the exact analytical solution of the linear isotropic elasticity with infinitesimal
deformation for a circular cylinder. The uniform circular cross-section may have an
arbitrary size (with the radius of ‘a’ here). Note that the pure bending also has the
exact analytical solution of the linear isotropic elasticity but its object may have an
arbitrary cross-sectional shape unlike the case of torsion here, which is only for
circular cross-sections. The infinitesimal elastic solution is extended here for
plasticity with finite deformation considering the one-dimensional elasto-perfect
plasticity as a first order approximate solution.
The circular cylinder under torsion is twisted by equal and opposite torques (or
moments) at two ends, while traction is free at the side wall as shown in Fig. 7.1, in
which the origin of the coordinate system is at the center of the cylinder. The
procedure for the exact solution supports that circular cross-sectional planes of the
cylinder remain as planes and rotate about the x-axis, regardless of material
properties with isotropy (therefore, commonly applicable for elastic, viscoelastic
and plastic materials with isotropy and infinitesimal deformation).
As for the rotation of circular cross-sections, an initial straight line at the inner
side wall (of a cylinder with the radius r), AB, remains a straight line and rotates to
AB’ under torsion so that
BB0
rD/
d/
¼r
¼ lim
Dx!1 Dx
Dx!1 Dx
dx
cx/ ð¼ c/x ¼ 2ex/ Þ ¼ b ¼ lim
ð7:1Þ
where d/
dx (also denoted by /;x ) is the rate of twist. The relationship between the
torque T and the rate of twist /;x during initial twisting under torsion is analyzed
here. Note that, for cylinders with non-circular cross-sections, the cross-sectional
planes of the cylinder do not remain as planes so that Eq. (7.1) is invalid.
© Springer Nature Singapore Pte Ltd. 2018
K. Chung and M.-G. Lee, Basics of Continuum Plasticity,
https://doi.org/10.1007/978-981-10-8306-8_7
111
112
7 Torsion
Fig. 7.1 The schematic view of the circular cylinder under torsion
Within the elastic limit,
1. Kinematics
c¼r
d/
¼ r/;x
dx
2. Constitutive law
sð¼ rx/ Þ ¼ Gc ¼ Gr/;x
ð7:2Þ
3. Moment equilibrium condition at the two ends
Z
Z
Tð¼ Mx Þ ¼
rsdA ¼ G/;x
r 2 dA ¼ GJ/;x ð¼
Gpa4 /;x
Þ
2
ð7:3Þ
where the polar moment of area, J, becomes
Za
J¼
Za
r dA ¼
2pr 3 dr ¼
2
0
0
pa4
2
ð7:4Þ
7 Torsion
113
The total angle of twist D/ between two cross-sections ‘ distance apart becomes
Z‘
D/ ¼
0
T
T‘
dx ¼
GJ
GJ
ð7:5Þ
Beyond the elastic limit,
1. Kinematics is the same with Eq. (7.1)
2. Constitutive law is the elasto-perfect plasticity.
As illustrated in Fig. 7.2, the elastic limits of the engineering shear strain and the
rate of twist are obtained when the shear stress reached its yield stress K at the side
wall of the cylinder, r = a; i.e.,
ce ¼
K
K
¼ að/;x Þe and ð/;x Þe ¼
G
Ga
ð7:6Þ
When twisting goes beyond the elastic limit, there is the boundary of the elastic
and plastic ranges as the plastic deformation propagates from the side wall to the
center as shown in Fig. 7.2. The location of the boundary becomes
n ð/;x Þe
¼
for /;x ð/;x Þe
a
/;x
ð7:7Þ
considering that
ce ¼
K
¼ að/;x Þe ¼ n/;x
G
Fig. 7.2 Evolution of stress distribution at the cross-section of the cylinder in torsion
ð7:8Þ
114
7 Torsion
Fig. 7.3 Stress distribution at the cross-section of the cylinder when twisting is beyond the elastic
limit
Now, the stress distribution becomes, as shown in Fig. 7.3,
s¼
for n r a
for 0 r n
K
K
n
r
ð7:9Þ
3. Moment equilibrium condition at two ends
As for the torque for twisting,
Z
Tð¼ Mx Þ ¼
Z
rsdA ¼
0
n
K 2
r ð2prdrÞ þ
n
Z
n
2pKa
1 ð/;x Þe
ð1 ¼
3
/;x
4
3
a
Krð2prdrÞ ¼
!3
2pK 3 n3
ða Þ ðwhere 0 n aÞ
4
3
Þ ðwhere ð/;x Þe ð/;x Þ 1Þ
ð7:10Þ
for which the elastic limit torque and the maximum torque are (Fig. 7.4)
pKa3
2
2pKa3
Tð/;x ¼ 1Þ ¼ Tc ¼
3
Tð/;x ¼ ð/;x Þe Þ ¼ Te ¼
ð7:11Þ
Since derivation here is based on the infinitesimal deformation theory, the
maximum moment is invalid in a strict sense but considered as a first approximation
for engineering purposes.
HW #7.1
Note that all the relationships for pure bending and torsion are similar to each other
including the relationships between the torsion/bending moment and the rate of
twist/bending curvature during initial loading as well as reverse loading as shown in
Figs. 6.6 and 7.5. Derive the relationship between the torque and the rate of twist
during reverse loading as well as residual stress for Fig. 7.5 as done for pure
bending with Fig. 6.6 in Sect. 6.1.
7 Torsion
115
Fig. 7.4 The relation between the torque and the rate of twist as well as the evolution of the
boundary between the elastic and plastic ranges during torsion
Fig. 7.5 The relationship
between the torque and the
rate of twist in torsion a when
the initial twisting is equal or
larger than twice the elastic
limit (ð/;x Þ2 2ð/;x Þe ) and
b when the initial torsion is
smaller than twice the elastic
limit
(ð/;x Þe ð/;x Þ2 2ð/;x Þe )
(a)
(b)
Part II
Basics of Continuum Mechanics
The basics of continuum mechanics are briefly reviewed in this part, since a solid
understanding of these basic concepts is vital for three-dimensional constitutive
laws of plasticity. This is not intended to be a comprehensive overview but rather a
review of only the necessary fundamentals.
Chapter 8
Stress
In continuum mechanics, an element of a whole body has a mass (dm: the differential mass) and a volume (dV: the differential volume) as well as a shape.
The shape is typically considered to be a hexahedron whose six surfaces are aligned
with the coordinate system as shown in Fig. 8.1. The coordinate system in this
whole book is the rectangular Cartesian coordinate system, which is denoted as
x-y-z or 1-2-3 (for the indicial notation), with unit base vectors, ex ð¼ e1 Þ, ey ð¼ e2 Þ
and ez ð¼ e3 Þ. Here, the internal force is a three-dimensional surface force applied
on each of the six surfaces of a volume element: DFx ; DFy ; DFz on three surfaces
facing positive x, y and z directions, respectively. These internal forces are
dependent on the surface size; therefore, they are normalized by the surface size,
considering that their sizes converge to zero as the number of elements becomes
infinite (as a limit), to define stress components; i.e.,
0
rxx
1
DFx dFx
B
C
¼
tx ¼ @ rxy A
DA
dA
rxz
0
1
ryx
DFy dFy
B
C
¼
ty ¼ @ ryy A
lim
DA!0 DA
dA
ryz
0
1
rzx
DFz dFz
B
C
¼
tz ¼ @ rzy A
lim
DA!0 DA
dA
rzz
lim
DA!0
ð8:1Þ
Here, the traction vectors, tx ; ty ; tz , are on the surface facing positive x, y and z
directions, respectively, and, for the stress component, the first and second subscripts represent the surface direction and the component direction, respectively.
The nine stress components are stored either in a matrix or column/row vectors:
© Springer Nature Singapore Pte Ltd. 2018
K. Chung and M.-G. Lee, Basics of Continuum Plasticity,
https://doi.org/10.1007/978-981-10-8306-8_8
119
120
8 Stress
0
0
rxy
rxx
B
r ¼ @ ryx
rzx
ryy
rzy
1 0
rxz
r11
C B
ryz A¼@ r21
rzz
r31
or rT ¼ rxx
ryy
rzz
¼ ð r11
r22
r33
rxy
r12
r12
r22
r13
r23
r32
r33
ryx
r21
ryz
r23
B
B
B
B
B
1
B
B
B
C
Aor r ¼ B
B
B
B
B
B
B
B
@
rzy
r32
rxz
r13
rxx
ryy
rzz
rxy
ryx
ryz
rzy
rxz
rzx
1 0
C B
C B
C B
C B
C B
C B
C B
C B
C¼B
C B
C B
C B
C B
C B
C B
C @
A
r11
1
r22 C
C
C
r33 C
C
r12 C
C
C
r21 C
C
r23 C
C
r32 C
C
C
r13 A
r31
rzx
r31 Þ
ð8:2Þ
Here, r is the Cauchy stress tensor (with nine components) as the force intensity
normalized with the current surface area as a true stress measure. For the theory of
infinitesimal deformation, there is no distinction between the normalization with the
current area and the initial area, which represents the true and engineering stresses,
respectively. Here, rxx ; ryy ; rzz are known as the normal components and
rxy ; ryz ; rzx ; ryx ; rzy ; rxz are the tangential (or shear) components. In this text, the
tensors (or matrix) and vectors are identified with bold characters (there will be
further discussion on the difference between the tensor and the matrix later).
Note that there are six surfaces for each element and the stress components in
Eq. (8.2) are for the three surfaces facing the positive x, y and z directions. As for
the stress components for the three surfaces facing the negative directions, the
values are the same but with opposite signs by Newton’s third law of action and
reaction as illustrated in Fig. 8.2. Therefore, the stress components of the negative
surface directions are not separately addressed. However, there still remains some
confusion between tension and compression as illustrated in Fig. 8.2 for example.
These two quantities are distinctly different in that, for tension, the stress component is positive for the positive surface and negative for the negative surface, while,
for compression, the stress component is negative for the positive surface and
positive for the negative surface. To account for this critical difference, stress
components are applied with the following sign convention: normal and tangential
stress components are positive when they are in the positive direction for the
positive surface (and in the negative direction for the negative surface), while the
normal and tangential stress components are negative when they are in the negative
direction for the positive surface (and in the positive direction for the negative
surface). The eighteen stress components with positive values are collectively
shown in Fig. 8.1.
The internal force which is modified into a stress measure (as a force per unit
area) on each surface is utilized to formulate the (rigid body) translational and
8 Stress
121
Fig. 8.1 An element of a continuum body in the rectangular Cartesian coordinate system and
eighteen positive stress components (with solid and dotted arrows for surfaces facing the positive
and negative coordinate directions, respectively)
(a)
(b)
y
x
z
Fig. 8.2 Stresses on the surfaces facing the positive and negative x directions, respectively, which
share the same magnitude but opposite signs, as shown for a tension and b compression
rotational motions as well as deformation of an individual element for deformable
dynamics. As for translation, applying Eq. (1.19) for a continuum body, the total
sum of force in the x-direction shown in Fig. 8.3 for six surfaces leads to
n
o
RFx ¼ rxx ðx þ DxÞ rxx ðxÞ DyDz þ ryx ðy þ DyÞ ryx ðyÞ DxDz
þ rzx ðz þ DzÞ rzx ðzÞ DxDy þ qbx DxDyDz
¼ ðqDxDyDzÞax
ð8:3Þ
where the value with the superscript (*) means the average on the surface or in
the volume and bx is the body force (such as weight) component per unit mass. The
body force which is directly applied to a mass differs from the internal force, which
is the surface force applied to surfaces. Considering the following Taylor series,
122
8 Stress
Fig. 8.3 Stress components on six surfaces in the x-direction for the volume element in the
current configuration
@rxx ðxÞ
Dx þ HOT
@x
@ryx ðyÞ
Dy þ HOT
ryx ðy þ DyÞ ¼ ryx ðyÞ þ
@y
@r ðzÞ
rzx ðz þ DzÞ ¼ rzx ðzÞ þ zx Dz þ HOT
@z
rxx ðx þ DxÞ ¼ rxx ðxÞ þ
ð8:4Þ
where HOT stands for the high order term,
RFx
@rxx @ryx @rzx
¼
þ
þ
þ qbx ¼ qax
Dx;Dy;Dz!0 DxDyDz
@x
@y
@z
lim
ð8:5Þ
As the element size converges to zero, the values lose the (*) notation since they
are no longer the average. The same procedure applied to the y and z directions
leads to
@rxy @ryy @rzy
þ
þ
þ qby ¼ qay
@x
@y
@z
@rxz @ryz @rzz
þ
þ
þ qbz ¼ qaz
@x
@y
@z
ð8:6Þ
HW #8.1
Derive Eq. (8.6).
As for rotation, when Eq. (1.22) is applied to a continuum body shown in
Fig. 8.4, the total sum of moment in the z-direction by stress components on the x-y
plane with respect to the center leads to
8 Stress
123
Fig. 8.4 Stress components
in the x-y plane contributing
to Mz
Dx
Dx
Dy
Dy
DyDz þ rxy ðxÞ DyDz ryx ðy þ DyÞ DxDz ryx ðyÞ DxDz
2
2
2
2
2
2
@r
ðxÞ
@r
ðyÞ
Dx
Dy
xy
yx
¼ rxy ðxÞDxDyDz þ
DyDz ryx ðyÞDyDxDz DxDz þ HOT
@x
2
@y
2
ZZZ
¼
qðDxDyDzÞðx2 þ y2 Þaz
RMz ¼ rxy ðx þ DxÞ
DV
ð8:7Þ
After considering the Taylor series,
lim
RMz
Dx;Dy;Dz!0 DxDyDz
¼
¼
lim
Dx;Dy;Dz!0
lim
Dx;Dy;Dz!0
@rxy Dx
@ryx Dy
ðrxy þ
ryx þ HOTÞ ¼ rxy ryx
@x 2
@y 2
ZZZ
qðx2 þ y2 Þaz ¼ 0
DV
ð8:8Þ
where x and y, the two components of a position vector of a point inside the
element, vanish as the size of the element converges to zero and az is the angular
acceleration about z-axis. Therefore,
rxy ¼ ryx
ð8:9Þ
The same procedure applied for Mx and My leads to
rxz ¼ rzx
ryz ¼ rzy
ð8:10Þ
124
8 Stress
HW #8.2
Derive Eq. (8.10).
Remark #8.1 Equations of motion, equilibrium conditions and the principle of
moment of momentum
Equations (8.5) and (8.6) are known as Cauchy’s equations of motion and,
when the acceleration vanishes, they are called the force equilibrium coditions.
The results derived in Eqs. (8.9) and (8.10) are known as the principle of the
moment of the momentum (or simply, the moment equilibrium conditions).
Derivations here are for the current configuration, not for the initial configuration;
therefore, the gradient in Cauchy’s equations of motion is with respect to the current
position vector, x, not the initial position vector, X. For the theory of infinitesimal
deformation, in which deformation is so small, x X so that the gradient becomes
with respect to the initial position vector X.
Remark #8.2 Wave propagation (or vibration)
When the stress in Cauchy’s equations of motion is replaced by proper material
properties, the equations cover wave propagation in fluids as well as solids of
elasticity, viscoelasticity and plasticity, which will be further discussed later.
Remark #8.3 The indicial notation and summation convention
Three equations derived for translation are simplified to one equation in Eq. (1.26).
Such simplification consists of two steps. The first step is to apply the indicial
notation, in which x, y and z are replaced with any arbitrary index; i.e., i or j or
other index. These indices can then be assigned replacement values of 1, 2 and 3.
Then, all three equations are compacted into one expression:
3
P
ðrji;j Þ þ qbi ¼ qai for i ¼ 1; 2 and 3
j¼1
or
3
P
ð8:11Þ
ðrki;k Þ þ qbi ¼ qai for i ¼ 1; 2 and 3
k¼1
Here, note that the summation is performed for the index j or k, which is called
the dummy index since the summation is independent of the particular index used.
The index i is called the free index, which exists for each term but it stands alone
within each term, without being repeated as happens to the dummy index,
j and k. Now, the expression can be further simplified in the second step by
applying the following
Einstein’s summation convention to eliminate the sumP
mation notation, ; i.e., whenever an index is repeated once within an any term, it
is a dummy index representing summation.
ðrji;j Þ þ qbi ¼ qai for i ¼ 1; 2 and 3
ð8:12Þ
Therefore, Eq. (8.12) becomes Eq. (1.26) after considering Eq. (1.27).
Similarly, three equations for the moments become Eq. (1.27), in which the indices
i and j are free indices.
8 Stress
125
Note that the meaning of the two subscripts for the stress component in
Eqs. (1.26) and (8.12) are opposite; however, this difference becomes meaningless
because of Eq. (1.27). The stress tensor (in the matrix expression) is symmetric:
rT ¼ r (where rT is the transpose of r as will be discussed later)
Remark #8.4 The Kronecker delta
The Kronecker delta, which is very useful in various mathematical expressions, is
defined as
dij ¼
1 if i ¼ j
0 if i ¼
6 j
ð8:13Þ
Since i and j are free indices, d11 ¼ d22 ¼ d33 ¼ 1, while, d12 ¼ d23 ¼ d31 ¼
d21 ¼ d32 ¼ d13 ¼ 0.
dii ¼ d11 þ d22 þ d33 ¼ 3, for which i is the dummy
Also,
index. The matrix, dij , whose component is the Kronecker delta, represents the
identity matrix, which is also often denoted with I.
HW #8.3
Prove that dim am ¼ ai , dim Tmj ¼ Tij , dim dmj ¼ dij and dim dmj djn ¼ din .
Remark #8.5 Equation (1.26) is valid for deformable body dynamics and becomes
Eq. (1.28) for deformable body statics such as plasticity; however, Eq. (1.27) is
valid for both. Equations (1.27) and (1.28) imply that translation and rotation occur
virtually spontaneously when deformation occurs without consuming any energy
for deformable statics; therefore, all energy (or external work applied) is used for
deformation (as will be derived later), which is mostly dissipated as heat in plasticity. For the elastic body, deformation energy is not dissipated but stored.
Remark #8.6 Area vector
Area is a vector, whose components are the projected area on the y-z, z-x and x-y
planes, respectively. To prove it, consider the area, which intersects with the axes at
(a, 0, 0), (0, b, 0) and (0, 0, c) as shown in Fig. 8.5, Then,
0
1 0
1
ex
a
0
1@
1
A¼
0 A @ b A ¼ a
2
2
c
c
0
ey
0
b
0 bc 1 0 1 0 1 1
ez Ax
a
2
A ¼ @ Ay A @ 1 A
c ¼ @ ac
b
2
1
ab
c Az
c
2
ð8:14Þ
(with three unit base vectors, ex , ey and ez ).
Remark #8.7 Traction vector
The nine components of the Cauchy stress shown in Eq. (8.2) are the surface
force intensity per unit area obtained for six surfaces facing positive x, y and z axes.
Now, consider the traction vector, the force intensity per unit area, for the area
facing an arbitrary n direction, for which nT ¼ ðcos hx ; cos hy ; cos hz Þ ¼
ðcos h1 ; cos h2 ; cos h3 Þ while cos hi is known as the direction of cosine defined in
Fig. 8.5a. Then, the total force of the area facing the n direction, Fn, becomes,
126
8 Stress
(a)
(b)
Fig. 8.5 a The unit normal direction of the area, n, and the definition of the direction of cosine,
b the area vector, A, and the traction vector, tn
0
1 0
rxx Ax þ ryx Ay þ rzx Az
rxx
B
C B
C B
Fn ¼ @ Fny A ¼ @ rxy Ax þ ryy Ay þ rzy Az A ¼ @ rxy
rxz Ax þ ryz Ay þ rzz Az
rxz
Fnz
Fnx
1
0
ryx
ryy
10 1
rzx
Ax
CB C
rzy A@ Ay A ¼ rT A
ryz
rzz
Az
¼ r jAjn ¼ rjAjn
T
considering Eq. (8.14). Therefore, the traction vector, tn, becomes
0 1
0
rxx
tx
F
n
tn ¼ @ ty A ¼
¼ @ rxy
jAj
rxz
tz
ryx
ryy
ryz
10 1
rzx
nx
rzy A@ ny A ¼ rT n ¼ rn
rzz
nz
ð8:15Þ
where n is the unit vector of an area. Furthermore,
rnn ¼ n tn ¼ n rnð¼ nT rnÞ
rnm ¼ m tn ¼ m rnð¼ mT rnÞ ¼ rmn ¼ n rmð¼ nT rmÞ
ð8:16Þ
for the normal and tangential components of traction where m is the unit vector
tangential to the area
EX #8.1
Applying the indicial notation, Eq. (8.15) becomes
0
1 0
r11
t1
@ t2 A ¼ @ r12
t3
r13
or
r21
r22
r23
10 1 0
r31
n1
r11
r32 A@ n2 A ¼ @ r21
r33
n3
r31
r12
r22
r32
10 1
r13
n1
r23 A@ n2 A
r33
n3
ð8:17Þ
8 Stress
ti ¼
3
X
127
rji nj ¼
j¼1
3
X
rTij nj ¼
3
X
j¼1
rij nj ¼
3
X
j¼1
rki nk ¼
k¼1
3
X
rTik nk ¼
k¼1
3
X
rik nk for
k¼1
i ¼ 1; 2; 3
After applying the summation convention, this becomes
ti ¼ rji nj ¼ rTij nj ¼ rij nj ¼ rki nk ¼ rTik nk ¼ rik nk
ð8:18Þ
with the free index, i, and the dummy indices, j and k, significantly simplifying the
expression.
Remark #8.8 Notation for the operation of vectors and matrices (and tensors)
Some of the notations used for the operation of vectors and matrices (and tensors
discussed in Chap. 9) are summarized here. Further notations will be supplied later
when necessary.
1. Bold lower case letters are usually used for vectors and bold upper case letters
are usually used for matrices and tensors.
2. A column vector is standard, for example,
0 1
a1
a ¼ @ a2 A and, its transpose, aT ¼ ð a1 a2 a3 Þ
ð8:19Þ
a3
3. Dot product of two vectors
a bðwith a dotÞ ¼ aT bðwithout a dotÞ
¼ ai ei bj ej ¼ ai bj ei ej ¼ ai bj dij ¼ ai bi ð¼ a scalar, cÞ
ð8:20Þ
Equivalently, in a matrix form
0
a b ¼ ð a1
a2
1
b1
a3 Þ @ b2 A
b3
4. For a scalar function of a vector, f = f(x),
df ¼
@f
@f
@f
dx1 þ
dx2 þ
dx3
@x1
@x2
@x3
ð8:21Þ
128
8 Stress
¼
0
@f
@x1
@f
@x2
@f
@x3
1
dx1
@ dx2 A ¼ @f dxðwith a dotÞ
@x
dx3
@f T
¼
dxðwithout a dotÞ
@x
ð8:22Þ
or equivalently, in index notation
df ¼
@f
dxi
@xi
ð8:23Þ
5. For a vector function of a vector, u = u(x),
1
@u1
@u1
@u1
dx1 þ
dx2 þ
dx3 C
@x2
@x3
0
1 B
C
B @x1
du1
C
B
C
B
@u2
@u2
@u2
B
C
C
du ¼ @ du2 A ¼ B
dx
þ
dx
þ
dx
1
2
3C
B @x
@x2
@x3
C
B 1
du3
C
B
A
@ @u3
@u3
@u3
dx1 þ
dx2 þ
dx3
@x1
@x2
@x3
1
0
@u1 @u1 @u1
B @x1 @x2 @x3 C0
1
C dx1
B
C
B
B @u2 @u2 @u2 CB
C @u
CB
C
¼B
B @x @x @x C@ dx2 A ¼ @x dxðwithout a dotÞ
2
3C
B 1
C
B
@ @u3 @u3 @u3 A dx3
@x1 @x2 @x3
0
ð8:24Þ
or equivalently in index notation
dui ¼
@ui
dxj
@xj
ð8:25Þ
@ui
T @u
Therefore, a @u
@x dxð¼a @x dxÞ becomes equivalent with ai dui ¼ ai @xj dxj , which
is used in Eq. (8.16)
6. For an equation which involves the fourth order tensor, C, (to be discussed in
Chap. 9) such as Eq. (1.30), rij ¼ Cijkl Ekl ,
r ¼ CEðwithout a dot)
References
129
References
Dieter, G. E., & Bacon, D. J. (1986). Mechanical metallurgy (Vol. 3). New York: McGraw-hill.
Hosford, W. F., & Caddell, R. M. (2011). Metal forming: Mechanics and metallurgy. Cambridge
University Press.
Shames, I. H., & Pitarresi, J. M. (2000). Introduction to solid mechanics. Pearson College
Division.
Chapter 9
Tensors
The stress with nine components derived in Eq. (8.1) is a tensor. The main task of
tensors is to transform one vector to another; i.e.,
Ta ¼ b
ð9:1Þ
where T is a tensor, transforming a vector a to a vector b. More specifically, the
tensor allows the following linear transformation:
Tðaa1 þ ba2 Þ ¼ Tðaa1 Þ þ Tðba2 Þ ¼ aTa1 þ bTa2 ¼ ab1 þ bb2
ð9:2Þ
where a and b are scalars and a1, a2, b1 and b2 are vectors. Equation (8.15) is an
example of such transformation, Eq. (9.1), for which T ¼ r ¼ rT and a = n and
b = tn. As confirmed in Eq. (8.15), the transformation is conveniently expressed
when T is in a matrix form and vectors are in the form of column vectors. As shown
in Eq. (8.2), a tensor can also be expressed in a vector form but, to express its role
as a transformation, its matrix expression is the standard; i.e.,
0
T11 T12
Ta ¼ @ T21 T22
0 T311 T32
bx
¼ @ by A
bz
10 1 0
Txx
T13
a1
T23 A@ a2 A ¼ @ Tyx
Tzx
T33
a3
Txy
Tyy
Tzy
10 1
0 1
Txz
ax
b1
Tyz A@ ay A ¼ b ¼ @ b2 A
Tzz
az
b3
ð9:3Þ
or
bi ¼ Tij aj ð¼Tik ak Þ
ð9:4Þ
as demonstrated in Eqs. (8.17) and (8.18).
© Springer Nature Singapore Pte Ltd. 2018
K. Chung and M.-G. Lee, Basics of Continuum Plasticity,
https://doi.org/10.1007/978-981-10-8306-8_9
131
132
9
Tensors
Equation (9.3) confirms that the first column of the matrix for T is Tex (=Te1),
the second column is Tey (=Te2) and the third one is Tez (=Te3). Therefore, the
component of a tensor T in the matrix form becomes
Tij ¼ ei Tej
ð9:5Þ
Remark #9.1 Product of two tensors
Consider two tensors, T and S, and the following sequential transformation of
vectors, a to b and then to c: Ta = b and Sb = c. Then, Sb = S(Ta) = (ST)
a = Aa = c, in which a new tensor is introduced as the product of two tensors,
A = ST, while ci = Sijbj and bj = Tjkak. Therefore, ci = SijTjkak = Aikak(= Aijaj) so
that Aik = SijTjk (with the dummy index j and free indices, i and k), which is
equivalent with the product of two matrices in mathematical manipulation. Note that
TS is not equal with ST; i.e., the tensor product is not commutative.
Remark #9.2 Identity tensor
The identity tensor I transforms any vector into itself. Therefore, it consists of the
following three column vectors, Ie1 = e1, Ie2 = e2 and Ie3 = e3 so that Iij is the
Kronecker delta, dij .
Remark #9.3 Transpose of a tensor
For the transpose of a tensor T, denoted by TT, b Ta ¼ a T T b. Therefore,
ei Tej ð¼ Tij Þ ¼ ej T T ei ð¼ TjiT Þ; i.e., TTij = Tji. Consequently, the column and row
vectors which construct the original tensor are exchanged in its transpose tensor.
HW #9.1
Prove that, for the transpose of the product of two tensors, (AB)T = BTAT.
Remark #9.4 Inverse tensor
For the inverse tensor of a tensor T, denoted by T−1, T−1T = I and TT−1=I. The
inverse tensor exists when the determinant of T, detT, does not vanish.
T 1 ¼
1
ðCij ÞT
det T
where (Cij)T is the transpose matrix composed of the cofactor of Tij.
HW #9.2
Prove that, for the inverse tensor of the product of two tensors, (AB)−1 = B−1A−1.
HW #9.3
Confirm that
T 1 ¼
1
det T
T22
T21
T12
T11
Remark #9.5 Symmetric and anti-symmetric (skew-symmetric) tensor
A tensor T is called symmetric, if T = TT; i.e., its column vectors are equal with its
row vectors: Tij = TTij = Tji. A tensor T is called anti-symmetric (or
9 Tensors
133
skew-symmetric), if T = −TT: Tij = −TTij = −Tji. Note that the diagonal components of an anti-symmetric tensor are zero. Any tensor T can be decomposed into
symmetric and anti-symmetric tensors as
1
1
T ¼ ðT þ T T Þ þ ðT T T Þ
2
2
1
TS ¼ ðT þ T T Þ
2
1
T A ¼ ðT T T Þ
2
where TS is symmetric and TA is anti-symmetric.
HW #9.4: Trace of a tensor or trace of the product of two tensors
Trace of a tensor is the sum of the diagonal terms; i.e., trðTÞ ¼ Tij dij ¼ Tii .
Obviously, tr(T) = tr(TT). Now, the trace of the product of two tensors becomes
trðABÞ ¼ Aij Bik dik ¼ Aij Bji ¼ trðBAÞ A B ¼ B Að6¼Aij Bij Þ. If any one of the
two tensors are symmetric, for example, if B is symmetric to A, then A B ¼ AS B,
since the trace of the product of symmetric and anti-symmetric tensors becomes
zero. Prove this. Therefore, if any one of the two tensors is symmetric,
A Bð¼ B AÞ ¼ Aji Bji ¼ Aij Bij . Then, the trace of the product of two tensors
becomes the dot product of two vectors (a well known manipulation in linear
algebra), in which tensor components are treated as vector components as shown in
Eq. (8.2) for the stress tensor as an example.
Remark #9.6 Orthogonal tensor
A transformation by the orthogonal tensor R represents rigid body rotation (and
reflection, which is not a main concern here). If e1, e2 and e3 rotate to e’1, e’2 and e’3
respectively by rigid body motion, while keeping their sizes and relative directions
the same (such as being orthogonal to each other), then Rei = e’i , which provides
three unit column vectors of R, considering Eq. (9.5). Furthermore,
0
1
e01T
RT R ¼ @ e02T Að e01 ; e02 ;
e03T
0
1
ðRe1 ÞT
e03 Þ ¼ @ ðRe2 ÞT Að Re1 ; Re2 ;
ðRe3 ÞT
Re3 Þ ¼ I
ð9:6Þ
meaning that the unit column vectors of the orthogonal tensor are orthogonal to
each other. Now, consider Ra = b. Then, RTRa = RTb = a by Eq. (9.6). Also,
RRTb = Ra = b. Since b is arbitrary, RRT = I, meaning that unit row vectors of
the orthogonal tensor are also orthogonal to each other. Consequently, for the
orthogonal tensor R, its transpose tensor is its inverse tensor: RT = R−1. As for its
determinant,
detRT R¼ detRT detjRj ¼ detRRT ¼ ðdetjRjÞ2 ¼ detjI j ¼ 1
so that detjRj ¼ 1 (+1 for rigid body rotation and −1 for reflection).
134
9.1
9
Tensors
Transformation Laws for Vectors and Tensors
When there is a change of rectangular Cartesian coordinate system by rigid body
rotation, the components of a vector and a tensor change accordingly. Consider the
rigid body rotation of a coordinate system by an orthogonal tensor, which transforms e1, e2 and e3 to e01 ; e02 and e03 ; respectively; i.e., Rei = e01 : Then, Rij ¼
ei Rej ¼ ei e0j and the first, second and third column vectors of R are e01 ; e02 and e03 ;
respectively.
Now, consider a vector v, then v ¼ v0i e0i ¼ vj ej where ej ¼ ðej e0i Þe0i ; therefore,
v ¼ vj ej ¼ vj ðej e0i Þe0i ¼ v0i e0i , leading to
v0i ¼ vj ðej e0i Þ ¼ Rji vj
ð9:7Þ
which in matrix form becomes
v0 ¼ RT v
ð9:8Þ
where v0 , v and RT are a column vector consisting of new components, a column
vector consisting of old components and a matrix made of the transpose of the
orthogonal tensor, which rotates the coordinate system, respectively. Note that the
relationship in Eq. (9.8) is the matrix expression of the component change shown in
Eq. (9.7) and it is not a transformation by a tensor shown in Eq. (9.1).
Now, consider a tensor T, then its components become, according to Eq. (9.5),
Tmn ¼ em Ten and Tij0 ¼ e0i Te0j ; therefore,
Tij0 ¼ e0i Te0j ¼ ðe0i em Þem Tðe0j en Þen
¼ ðe0i em Þðe0j en Þem Ten ¼ Rmi Rnj Tmn
or
ð9:9Þ
0
Tij ¼ Rim Rjn Tmn
which becomes in a matrix form
T 0 ¼ RT TR
or
T ¼ RT 0 RT
ð9:10Þ
where T 0 , T and R are the matrix consisting of new components, the matrix consisting of old components and a matrix made of the orthogonal tensor, which rotates
the coordinate system, respectively. Note that the transformation law in Eq. (9.10)
is the matrix expression of the tensor component change shown in Eq. (9.9) and it is
not the product of tensors.
9.1 Transformation Laws for Vectors and Tensors
135
Remark #9.7 Dyadic product of two vectors
The dot product of two vectors, a and b, produces a scalar value s as
0 1
b1
a bð¼ aT bÞ ¼ ð a1 ; a2 ; a3 Þ@ b2 A ¼ ai bi ¼ s
b3
which is the product of the row vector and the column vector (note that there is no
dot for aT b, while a b has a dot, since a b just means the dot product of two
vectors, while aT b means the multiplication of a row vector aT and a column vector
b, in which the column vector is considered to be the standard form of a vector).
The dyadic product of two vectors, denoted as a b, produces a tensor T as
0 1
0
1
a1
a1 b1 a 1 b2 a1 b3
ð9:11Þ
a b ¼ @ a2 A ð b1 ; b2 ; b3 Þ ¼ @ a2 b1 a 2 b2 a2 b3 A ¼ T
a3
a3 b1 a 3 b2 a3 b3
which is the product of a column vector and a row vector. Therefore, Tij = aibj.
Obviously, ða bÞ c ¼ aðb cÞ ¼ aðbT cÞ, which becomes a column vector. Note
that the dot product and dyadic product of two vectors resembles the multiplication
of two matrices with the sizes of (m n) and (n m), which resulted in a (m m)
matrix. For the dot product, m = 1 and n = 3, while for the dyadic product, m = 3
and n = 1; i.e., a b ¼ aT b and a b ¼ abT .
HW #9.5
Obtain nine tensors for ei ej and then show that a tensor T becomes
T ¼ Tij ei ej ¼ Tij0 e0i e0j
ð9:12Þ
Utilizing Eq. (9.12), derive the transformation law for the component change
shown in Eq. (9.9).
Remark #9.8 If the first and second subscripts of the stress components represent
the surface direction and the component direction, respectively, r0ij ¼ e0j t0i ¼ e0j rT e0i ¼ e0j re0i , where r is the stress based on ei=1,2,3, considering Eqs. (8.15) and
(8.17); therefore,
0
10 0 0T 10
1
r11 r12 r13
r11 r12 r13
e1
@ r21 r22 r23 A ¼ @ e0T A@ r21 r22 r23 Að e01 ; e02 ; e03 Þ
2
r31 r32 r33
r31 r32 r33
e0T
3
Then, since the first, second and third column vectors of R are e’1, e’2 and e’3,
respectively,
r0 ¼ RT rR
which complies with Eq. (9.10). Note that r0ij ¼ r0ji in Eq. (9.13).
ð9:13Þ
136
9
Tensors
HW #9.6
The constitutive law of linear elasticity is rij ¼ Cijkl Ekl as shown in Eq. (1.30)
where rij and Ekl are the components of the tensors, r and E, defined in Eqs. (8.1)
and (1.29), respectively. Considering the transformation law of the tensor shown in
Eq. (9.9) for r and E, derive the following transformation law for the elastic
modulus tensor:
0
Cpqrs
¼ Rip Rjq Rkr Rls Cijkl
ð9:14Þ
Remark #9.9 Generalization of tensor
Generalizing the transformation laws for a vector and a tensor, derived in Eqs. (9.7)
and (9.9) as well as (9.14), the following generalized tensor definition is developed
based on the transformation law in the rectangular Cartesian coordinate system:
s0 ¼ s : zeroth order tensorðfor any sclar sÞ
v0i ¼ Rmi vm : first order tensorðfor a vector such as a position vectorÞ
Tij0 ¼ Rmi Rnj Tmn : sec ond order tensorðfor a tensor such as the Cauchy stressÞ
0
Tijk
¼ Rmi Rnj Rpk Tmnp : third order tensor
0
Tijkl
¼ Rmi Rnj Rpk Rql Tmnpq : fourth order tensorðsuch as the elastic modulusÞ
ð9:15Þ
A tensor without any description usually means a second-order tensor.
Remark #9.10 Mohr’s circle for a two-dimensional symmetric tensor
The stress for the plane stress state is
0
r11
r ¼ @ r21
0
r12
r22
0
1 0
0
rxx
0 A ¼ @ ryx
0
0
rxy
ryy
0
1
0
0A
0
Exy
Eyy
0
1
0
0 A
Ezz
Exy
Eyy
0
1
0
0A
0
and its strain for isotropic linear elasticity becomes
0
E11
E ¼ @ E21
0
E12
E22
0
1 0
0
Exx
0 A ¼ @ Eyx
E33
0
Also, the strain for the plane strain state is
0
E11
E ¼ @ E21
0
E12
E22
0
1 0
0
Exx
0 A ¼ @ Eyx
0
0
9.1 Transformation Laws for Vectors and Tensors
137
Fig. 9.1 Two-dimensional
coordinate system change by
rigid body rotation
and its stress for isotropic linear elasticity is
0
r11
r ¼ @ r21
0
r12
r22
0
1 0
0
rxx
0 A ¼ @ ryx
r33
0
rxy
ryy
0
1
0
0 A
rzz
For these two-dimensional symmetric second order tensors, the transformation law,
when there is a coordinate system change as ex0 ¼ cos hex þ sin hey , ey0 ¼ sin hex þ
cos hey and ez′ = ez as shown in Fig. 9.1, leads to
0
Tx0 x0
@ Ty0 x0
0
Tx0 y0
Ty0 y0
0
1 0
cos h sin h
0
0 A ¼ @ sin h cos h
0
0
T z0 z0
10
Txx
0
0 A@ Tyx
1
0
Txy
Tyy
0
10
cos h
0
0 A@ sin h
0
Tzz
1
sin h 0
cos h 0 A
0
1
or, simply,
Tx0 x0
Ty0 x0
Tx0 y0
Ty0 y0
¼
cos h
sin h
sin h
cos h
Txx
Tyx
Txy
Tyy
cos h sin h
sin h cos h
so that
ðTxx þ Tyy Þ ðTxx Tyy Þ
þ
cos 2h þ Txy sin 2h
2
2
ðTxx þ Tyy Þ ðTxx Tyy Þ
cos 2h Txy sin 2h
¼
2
2
ðTyy Txx Þ
sin 2h þ Txy cos 2h
¼ T y0 x0 ¼
2
Tx 0 x 0 ¼
Ty0 y0
Tx0 y0
ð9:16Þ
while other components remain the same.
HW #9.7
There are two invariants for two-dimensional cases, which are the values of
combination of components do not change even when there is a coordinate change:
(1) Txx þ Tyy ¼ Tx0 x0 þ Ty0 y0 ¼ trðTÞ, which is the trace of the tensor.
2
(2) Txx Tyy Txy
¼ Tx0 x0 Ty0 y0 Tx20 y0 ¼ detðTÞ, which is the determinant of the
tensor.
138
9
Tensors
For three-dimensional cases, there is one more invariant, which will be discussed
later. Confirm Eq. (9.16) and the two invariants.
The transformation law derived in Eq. (9.16) can be translated figuratively using
Mohr’s circle shown in Fig. 9.2.
The procedure to draw Mohr’s circle is
Set up A : ðTxx ; Txy Þ
Set up B : ðTyy ; Txy Þ
T þT
Set up C : ð xx 2 yy ; 0Þ
Draw a circle centered at C and connecting A and B : Mohr’s circle
Rotate the line ACB on Mohr’s circle by 2h opposite to the rotational direction
of the coordinate system. Note that the rotation of the coordinate system is
counterclockwise with the amount of h in Fig. 9.1 (with the right hand rule for
the rotation vector in the positive z-direction) so that line ACB rotates clockwise with the amount of 2h in Fig. 9.2 (which is equivalent with rotating by
2h). When h is negative in Fig. 9.1, rotating clockwise with the amount of jhj,
line ACB rotates counterclockwise with the amount of the amount of 2jhj.
Equation (9.16) is generally valid regardless of the h value.
(6) Read out the position of A’, which is ðrx0 x0 ; rx0 y0 Þ
(7) Read out the position of B’, which is ðry0 y0 ; rx0 y0 Þ
(1)
(2)
(3)
(4)
(5)
HW #9.8
Prove that the positions of A’ and B’ in Mohr’s circle are ðrx0 x0 ; rx0 y0 Þ and
ðry0 y0 ; rx0 y0 Þ as obtained in Eq. (9.16).
HW #9.9
There are two invariants in Mohr’s circle: the center position and the size of the
circle. Express two invariants confirmed in HW #9.7 with the two invariants
Fig. 9.2 Mohr’s circle
9.1 Transformation Laws for Vectors and Tensors
139
obtained from Mohr’s circle. Note that there are only two independent invariants
for two-dimensional cases (and three independent invariants for three-dimensional
cases); however in truth are an infinite number of invariants since any function of
invariants is also invariant.
9.2
Eigenvectors and Eigenvalues in Linear Algebra
One of the major elements in linear algebra is algebraic manipulation,
Aa = b where A is an n n matrix and a and b are n 1 column vectors. Here,
the matrix A linearly transforms a to b, which is emulated (or adopted) in tensor
manipulation as shown in Eq. (9.1). The difference between a matrix and a tensor
(and also a vector in linear algebra and a vector as the first order tensor) is that the
tensor quantities are closely tied with the rectangular Cartesian coordinate system as
mechanical quantities such that they follow the transformation laws summarized in
Eq. (9.15) for coordinate system changes, while a matrix and a vector are defined as
mathematical tools for mathematical manipulation in linear algebra. Therefore, the
tensor quantity may be expressed in a matraix form or in a vector as demonstrated
in Eq. (8.2).
The theory of eigenvalues and eigenvectors originated in linear algebra; therefore, it is applicable for tensors with a few modifications. Consider the algebraic
transformation Aa = b, with an n n square matrix A and n 1 column vectors
a and b. Among all possible a’s, a particular a*, for which A transforms it into a
vector which is aligned (or parallel) with a* itself, is the eigenvector; i.e., when the
following is held for a matrix A
Aa ¼ ka
ð9:17Þ
where a* is the eigenvector and k is the corresponding eigenvalue of A. Now, when
Eq. (9.17) is valid for A, the following is also valid
Aðaa Þ ¼ aAða Þ ¼ akða Þ ¼ kðaa Þ
for any a, suggesting that the norm of eigenvectors is indefinite in general. Note also
that A may have many eigenvectors with eigenvalues or A may not have any at all.
HW #9.10
Consider (1) A is an n x n identity matrix I (or the identity tensor with n = 3), then
confirm that any vector is the eigenvector, while their eigenvalues are all unity.
(2) A is aI, then any vector is the eigenvector, while their eigenvalues are a. (3) A is
a 2 2 anti-symmetric matrix (or a tensor),
A¼
0
A
A
0
140
9
Tensors
then confirm that Aa is vertical to a for any a (meaning that the dot product of Aa
and a is always zero), suggesting that an anti-symmetric matrix or tensor does not
have any eigenvectors in real space.
The mathematical procedure to obtain the eigenvalues/eigenvectors is that, from
Eq. (9.17),
ðA kIÞa ¼ 0
ð9:18Þ
which is n number of simultaneous linear algebraic equations. Therefore, when the
determinant of ðA kIÞ is non-zero, a* is zero, which is a trivial solution.
Non-trivial solutions are obtained when the determinant of ðA kIÞ is zero such
that n number of simultaneous equations are not completely linearly independent
(meaning that some of them are identical as each other so that its non-trivial
solutions exist, which are not unique).
The condition of the determinant is
detðA kIÞ ¼ 0
ð9:19Þ
leads to an algebraic equation with n roots for eigenvalues, known as the characteristic equation of A. After the eigenvalues are obtained from Eq. (9.19),
eigenvectors are obtained for each eigenvalue from Eq. (9.18), which are not
unique so that only the ratio of eigenvectors are determined (therefore, their norms
are indefinite). Note that the characteristic equation generally does not have
closed-form analytical solutions. Therefore, the case for n = 2 or 3, for which the
tensor is relevant and also the analytical solutions of the characteristic equation are
easily available, is considered here. When n = 3, the characteristic equation
becomes
A11 k
A12
A13 detðA kIÞ ¼ A21
A22 k
A23 ¼ 0
A31
A32
A33 k ð9:20Þ
which is the following cubic equation for k:
k3 I 1 k2 I 2 k I 3 ¼ 0
ð9:21Þ
where
8
I1 ¼ trðAÞ
>
¼ Aii >
<
A
A12 A22
I2 ¼ 11
A
A22 A32
>
21
>
:
I3 ¼ detðAÞ
A23 A11
A33 A31
A13 1
2
2
¼
¼ 12 Aij Aji Aii Ajj
trðA
Þ
ðtrðAÞÞ
A33 2
ð9:22Þ
Note that roots (or solutions) of Eq. (9.21) may be real and complex.
9.2 Eigenvectors and Eigenvalues in Linear Algebra
141
HW #9.11
Confirm Eqs. (9.21) and (9.22).
HW #9.12
When n = 2, derive the following quadratic characteristic equation
k2 I1 k þ I2 ¼ 0
ð9:23Þ
where
I1 ¼ trðAÞ
I2 ¼ detðAÞ
ð9:24Þ
Note that Eq. (9.23) may have real or complex roots. Confirm Eqs. (9.23) and
(9.24).
HW #9.13
Calculate eigenvalues and eigenvectors for a 2 2 anti-symmetric matrix defined
in HW #9.10(3). Since there is no real eigenvector for this case, the eigenvectors are
complex numbers and are not fully defined except the ratio of their components
since non-trivial solutions are not unique.
9.3
Principal Values and Principal Directions of Real
Symmetric Tensors
The eigenvalues and eigenvectors of real symmetric tensors are known as principal
values and principal vectors (or principal directions); therefore, the procedure to
calculate them is the same as the one for eigenvalues and eigenvectors of a matrix
already discussed. If the stress tensor is considered as an example along with
Eq. (8.15), the principal direction is the surface direction whose traction is aligned
with the surface direction such that the traction does not have a shear component
(the component tangential to the surface) but only has a normal component. The
surface direction is the principal direction (whose size is indefinite as the eigenvector) and the size of the traction is the principal value.
Here, it is important to state that any symmetric tensor with real components has
a set of principal directions which are orthogonal to each other; therefore, can be
considered as the rectangular Cartesian coordinate system. Also, their principal
values are real such that there are three normal components only when the tensor is
expressed based on the Cartesian coordinate system aligned with the orthogonal set
of the principal directions (this will be further discussed later).
Now, prove the following statements: the principal values of a real symmetric
tensor are real and its principal vectors are orthogonal to each other when the
principal values are distinct. To prove the first statement, assume that the principal
values are complex for a symmetric matrix with real components (therefore,
142
9
Tensors
principal vectors are also complex); i.e., Ta ¼ ka . Then, T
a ¼ k
a where k and
a are complex conjugates. Now, perform the dot product with a and a for each,
respectively. Then, the two become
a Ta ð¼ aT Ta Þ ¼ a ka ð¼ aT ka Þ ¼ kð
aT a Þ
and
aT Ta ¼ aT ka ¼ kðaT a Þ
aT a Þ, after transposing and considering T is symwhich becomes aT Ta ¼ kð
metric. Subtracting the second from the first leads to
ðk kÞðaT a Þ ¼ 0
ð9:25Þ
where aT a 6¼ 0 since the principal vector is non-trivial. Therefore, k ¼ k.
HW #9.14
Confirm that, when Ta ¼ ka , Ta ¼ ka where k and a are complex conjugates
of k and a , while T is a 2 2 real symmetric matrix for simplicity.
For the second statement, consider two principal values k1 and k2 while their
corresponding principal vectors are a1 and a2 , respectively. Then, Ta1 ¼ k1 a1 and
T T
T Ta2 ¼ k2 a2 . Therefore, aT
2 Ta1 ¼ k1 ða2 a1 Þ and a1 Ta2 ¼ k2 ða1 a2 Þ. Transposing
T
to the second one and considering that T is symmetric leads to a2 Ta1 ¼ k2 ðaT
2 a1 Þ.
Therefore,
ðk1 k2 ÞðaT
2 a1 Þ ¼ 0
ð9:26Þ
so that, when principal values are distinct (k1 6¼ k2 ), meaning that the characteristic
equations in Eqs. (9.21) and (9.23) do not have a repeating root, their principal
vectors are orthogonal to each other.
If principal values are the same for principal vectors, a1 and a2 (as double roots
of the characteristic equation), then by Eq. (9.26), the principal vectors may not be
orthogonal to each other in general. Rather, Ta1 ¼ ka1 and Ta2 ¼ ka2 so that
Tðaa1 þ ba2 Þ ¼ kðaa1 þ ba2 Þ for any scalars, a and b. Therefore, all possible
principal vectors form a plane by aa1 þ ba2 . This plane is normal to the third
principal vector of the principal value, which is distinct from the double roots, for
the case of n = 3. If n = 2, the plane is the whole x-y plane. When n = 3 and if the
then
characteristic
equation
has
triple
roots,
k ¼ k1 ¼ k2 ¼ k3 ,
Tðaa1 þ ba2 þ ca3 Þ ¼ kðaa1 þ ba2 þ ca3 Þ with arbitrary scalars, a, b and c so that
all possible principal vectors form the entire three-dimensional space. Note, however, that, when n = 2 and there are double roots so that the entire x-y plane is the
principal direction, one set of two orthogonal principal directions can be chosen
even if the choice is not unique. Similarly, when n = 3 and there are double or triple
roots, a set of three orthogonal principal vectors always can be chosen, even though
they are not unique.
9.3 Principal Values and Principal Directions of Real Symmetric Tensors
143
HW #9.15
According to Eq. (9.5), Tmn ¼ em Ten and Tij0 ¼ e0i Te0j , which are the tensor
components when the rectangular Cartesian coordinate systems are based on ei=1,2,3
and e0i1;2;3 ; respectively. Now, consider the unit vectors based on three orthogonal
principal vectors, ei¼1;2;3 ¼ ai¼1;2;3 =ai¼1;2;3 , then Tei ¼ ki ei (without summation
convention). When the rectangular Cartesian coordinate system is aligned with the
principal vectors, then Tij ¼ ei Tej ¼ ej ðkj ej Þ ¼ kj dij (without summation
convention); therefore,
0
1 0 T 1
8
k1 0 0
e1
>
>
>
> T ¼ @ 0 k2 0 A ¼ @ eT A Tij ð e1 ; e2 ; e3 Þ ¼ RT TR
>
2
>
<
0 0 k3 0
eT
3
10 T 1
k1 0 0
e1
>
>
>
@
>
A
@
A ¼ R T RT
e
;
e
;
e
>
0
k
T
¼
ð
Þ
0
eT
2
1
2
3
>
2
:
T
0 0 k3
e3
ð9:27Þ
where the three column vectors of R* are three unit principal vectors. Confirm
that Eq. (9.27) complies with Eq. (9.10). Note that this is applicable with a set of
orthogonal principal directions not uniquely chosen if the principal values are
double or triple roots. Also, note that invariants shown in Eqs. (9.22) and (9.24),
which are general for symmetric and non-symmetric matrics, become
8
< I1 ¼ trðTÞ
¼ Tii ¼ k1 þ k2þ k3
ð9:28Þ
I2 ¼ 12 Tij Tji Tii Tjj ¼ 12 Tij Tij Tii Tjj ¼ k1 k2 k2 k3 k3 k1
:
I3 ¼ detðTÞ ¼ k1 k2 k3
and
I1 ¼ trðTÞ ¼ Tii ¼ k1 þ k1
I2 ¼ detðTÞ ¼ k1 k2
ð9:29Þ
respectively.
The principal values contain the maximum and minimum values among all
possible normal component values of a real symmetric tensor as proven here.
Equation (9.9) is the relationship between the components of a tensor T when the
rectangular Cartesian coordinate systems are based on ei=1,2,3 and e0i1;2;3 . Now,
consider the relationship between the components of a real symmetric tensor
T when the rectangular Cartesian coordinate systems are based on e*i =1,2,3 and
e0i1;2;3 . Then, for any normal (or diagonal) component,
0
k1
B
Tii0 ¼ e0 i T e0i ¼ ð a; b; cÞ @ 0
0
0
k2
0
10 1
a
CB C
0 A@ b A
c
k3
0
i ¼ 1 or 2 or 3ðwithout summation conventionÞ
¼ k1 a 2 þ k 2 b 2 þ k 3 c 2
144
9
Tensors
where T* and e0i1;2;3 are based on e*i =1,2,3; i.e., e0 i ¼ ae1 þ be2 þ ce3 with i = 1 or 2
or 3.
Now, without loss of generality, assume that k1 k2 k3 . Then,
k1 ¼ k1 ða2 þ b2 þ c2 Þ
k1 a2 þ k2 b2 þ k3 c2 ¼ Tii0
since a2 þ b2 þ c2 ¼ 1. Similarly,
k3 ¼ k3 ða2 þ b2 þ c2 Þ
k1 a2 þ k2 b2 þ k3 c2 ¼ Tii0
Therefore, the principal values contain the maximum and minimum values among
all possible normal component values. Note here that, when there is a change of the
coordinate system, tensor components vary accordingly. However, the maximum
and minimum normal values among all possible normal component values incurred
by the coordinate system do not change so that the characteristic equation does not
change when there is a change of the coordinate; therefore, the coefficients of the
characteristic equation become the invarants.
HW #9.16
p 0
, confirm that
0 p
possible principal vectors
0 form the1x-y plane. (2) For a three-dimensional real
p 0 0
symmetric matrix, T ¼ @ 0 p 0 A, confirm that possible principal vectors form
0 0 q
the x-y plane, which is orthogonal to the 0third principal
1 vector. (3) For a
p 0 0
three-dimensional real symmetric matrix, T ¼ @ 0 p 0 A, confirm that possible
0 0 p
principal vectors form the whole x-y-z space. This case is introduced in Eq. (1.32)
for the Newtonian viscous fluid where p is the (static) pressure. Since three
orthogonal principal directions in any direction can form the rectangular Cartesian
system, T is invariant for any coordinate system change by rotation so that the static
pressure is always applied to the normal to any surface.
The procedure to solve the characteristic equation of the three-dimensional real
symmetric tensor, Eq. (9.21), is discussed here. For this purpose, a stress tensor is
considered here, even though the procedure is applicable for any three-dimensional
real symmetric tensor.
(1) For a two-dimensional real symmetric tensor, T ¼
Remark #9.11 Decomposition of the stress tensor into hydrostatic and deviatoric
stress tensors
A real symmetric stress tensor can be decomposed into hydrostatic and deviatoric
stress tensors; i.e.,
9.3 Principal Values and Principal Directions of Real Symmetric Tensors
145
1
r ¼ S þ trðrÞI
3
or
1
rij ¼ Sij þ rkk dij
3
ð9:30Þ
or
0 2r11 r22 r33
3
B
rij ¼ @
r21
r12
r13
2r22 r33 r11
3
r23
1
C
A
2r33 r11 r22
r31
r32
3
0
r11 þ r22 þ r33
0
B
B
1B
B
0
r11 þ r22 þ r33
þ B
3B
B
@
0
0
0
0
1
C
C
C
C
C
C
C
A
r11 þ r22 þ r33
where S is the deviatoric stress tensor and 13 trðrÞI is the hydrostatic stress
tensor. Note that tr(S) = Skk = 0 (since rii ¼ Sii þ 13 rkk dii ¼Sii þ rkk ).
HW #9.17
Prove that three principal directions are preserved and all three principal values are
smaller by hydrostatic values for the deviatoric stress tensor compared to those of
the original stress tensor.
Note that a stress tensor may be expressed with a 9 1 column vector
depending on convenience as discussed with Eq. (8.2). However, it is impossible to
plot a 9 1 column vector. Additionally, our main concern is normal components;
therefore, a 3 1 column vector with three normal components is considered here.
Then, r ¼ rS þ rH with
0 1
0
1
0
1
0
1
2r11 r22 r33
r11
1
S11
1
r
kk
@1A
r ¼ @ r22 A; rS ¼ @ S22 A ¼ @ r11 þ 2r22 r33 A; rH ¼
3
3
1
r33
S33
r11 r22 þ 2r33
which is plotted in Fig. 9.3.
Note that the hydrostatic stress is in the direction of (1,1,1), the hydrostatic line
direction, and the deviatoric stress is on the deviatoric
0 1 plane, which is vertical to the
1
hydrostatic line, ðS11 þ S22 þ S33 ¼ 0 with rTS @ 1 A ¼ 0Þ. Also note that
1
0 1
0 1 0
1
1
SI
rI
r
kk
@1A
@ rII A ¼ @ SII A þ
ð9:31Þ
3
1
rII
SIII
146
9
Tensors
Fig. 9.3 A three-dimensional (normal) stress vector and its decomposition into deviatoric and
hydrostatic stress vectors
where rI;II;III and SI;II;III are the principal values of the stress tensor and the deviatoric stress tensor, respectively.
Considering Eq. (9.31), in order to calculate rI;II;III , SI;II;III are obtained as three
roots of the following cubic equation for k:
k3 J 2 k J 3 ¼ 0
ð9:32Þ
8
< J1 ¼ trðSÞ
¼ Sii ¼ SI þ SII þ SIII ¼ 0
J2 ¼ 12 Sij Sji Sii Sjj ¼ 12Sij Sij ¼ 12 ðS2I þ S2II þ S2III Þ
:
J3 ¼ detðSÞ ¼ 13 Sij Sjk Ski ¼ SI SII SIII
ð9:33Þ
where
Now, consider the vector with three principal values of the deviatoric stress tensor
pffiffiffiffiffiffiffi
shown in Eq. (9.31) as S*, then its size is specified as jS j ¼ 2J2 and SI ¼ S ~e1
where ~ei¼1;2;3 are unit base vectors in Fig. 9.3. When ~e1 is decomposed into
hydrostatic and deviatoric parts,
~e1 ¼ ~e1S þ ~e1H
0 1 0 2 1 011
1
3
3
Aþ@1A
¼ @ 0 A ¼ @ 1
3
3
1
1
0
3
3
then, with S ~e1H ¼ 0,
SI ¼ S ~e1 ¼ S ~e1S
rffiffiffi
rffiffiffiffiffi
2 J2
cos h
¼ jS jj~e1S j cos h ¼
jS j cos h ¼ 2
3
3
ð9:34Þ
9.3 Principal Values and Principal Directions of Real Symmetric Tensors
147
where h, known as the Lode angle, is the angle between ~e1S and S on the deviatoric plane. Similarly,
rffiffiffi
rffiffiffiffiffi
2 2p
J2
2p
cosð hÞ
SII ¼ S ~e2 ¼ S ~e2S ¼
jS j cosð hÞ ¼ 2
3
3
3
3
ð9:35Þ
rffiffiffi
rffiffiffiffiffi
2 2p
J2
2p
SIII ¼ S ~e3 ¼ S ~e2S ¼
cosð þ hÞ
jS j cosð þ hÞ ¼ 2
3
3
3
3
as shown in Fig. 9.4. Therefore, derivation of the Lode angle completes the calculation of the principal values of the deviatoric stress tensor, S.
HW #9.18
Algebraically confirm that the angle between ~ei¼1;2;3 is 2p
3 on the deviatoric plane.
The Lode angle h is obtained from Eq. (9.32), replacing SI with k,
rffiffiffiffiffi
32
J2
J2
3
J2 cos h J3 ¼ 0
cos h 2
8
3
3
which becomes
2
32
J2
ð4 cos3 h 3 cos hÞ ¼ J3
3
Since ð4 cos3 h 3 cos hÞ ¼ cosð3hÞ,
3
J3 3 2
cosð3hÞ ¼
2 J2
Fig. 9.4 S* with three
principal values of the
deviatoric stress tensor on the
deviatoric plane
ð9:36Þ
148
9
Tensors
Since, in addition to a solution of h, 2p
3 h is also a solution of Eq. (9.36), the
2p
three solutions are cos h, cosð 3 hÞ and cosð2p
3 þ hÞ for Eq. (9.36) and three
principal values are derived in Eqs. (9.34) and (9.35). If the angle h satisfies
Eq. (9.36) with 0 h p3, then SI SII SIII (therefore, rI rII rIII ) as plotted
in Fig. 9.5. The principal vectors of the deviatoric stress tensor (and also the stress
tensor) are obtained from Eq. (9.18) where A is the deviatoric stress tensor, while
the principal values of the stress tensor are obtained from Eq. (9.31).
HW #9.19
Confirm that SII and SIII defined in Eq. (9.35) satisfy the characteristic equation,
Eq. (9.32).
HW #9.20
Confirm the two cases of double roots of the principal values in Fig. 9.5:
rffiffiffiffiffi0 1 1
rffiffiffiffiffi0 1 1
2
J
J
2@
12 A or 2 2 @ 12 A
S ¼ 2
3 1
3
1
2
Confirm that the condition for the triple roots of the stress tensor is S = 0.
HW #9.21
Since J1 = 0 for the deviatoric stress tensor, J2 can be various as
1
1
J2 ¼ Sij Sij ¼ ðS211 þ S222 þ S233 Þ þ S212 þ S223 þ S231
2
2
¼ ðS11 S22 þ S22 S33 þ S33 S11 Þ þ S212 þ S223 þ S231
1
¼ ððS11 S22 Þ2 þ ðS22 S33 Þ2 þ ðS33 S11 Þ2 Þ þ S212 þ S223 þ S231
6
1
¼ ððr11 r22 Þ2 þ ðr22 r33 Þ2 þ ðr33 r11 Þ2 Þ þ r212 þ r223 þ r231
6
Confirm this.
Fig. 9.5 Three principal
values of the deviatoric stress
tensor, SI , SII and SIII , [under
the condition of 0 h p3 as a
solution of Eq. (9.36)]
120
180
ð9:37Þ
60
S III
SI
S II
300
240
2
J2
3
0
9.3 Principal Values and Principal Directions of Real Symmetric Tensors
149
HW #9.22
Verify that the second invariants of the stress and the deviatoric stress have the
following relationship:
1
I2 ¼ J2 I12
3
ð9:38Þ
Remark #9.12 Principal values and principal directions of 2-D real symmetric
tensors
The eigenvalues and eigenvectors of the real symmetric tensor are principal values
and principal vectors. The principal values contain the maximum and minimum
values among all possible normal component values of a real symmetric tensor
when there is a change in the rectangular Cartesian coordinate system by rigid body
rotation, while the principal directions are the corresponding surface directions of
the principal values without tangential components, as proven based on the theory
of eigenvalues and eigenvectors.
Here, principal values and principal vectors are obtained directly considering
maximum and minimum normal components of a 2 2 real symmetric tensor.
Consider a surface aligned with the n and t directions rotated by a from the x and y
directions (with n and t as their unit base vectors, respectively) as shown in
Fig. 9.6.
Emulating the relationship of Eq. (8.15), the normal and tangential (or shear)
components of a symmetric tensor T for this surface becomes
8
Txx Txy
cos a
>
T
>
>
Tnn ¼ n Tn ¼ n Tn ¼ ð cos a sin a Þ
>
>
Tyx Tyy
sin a
>
>
>
>
<
ðTxx þ Tyy Þ ðTxx Tyy Þ
þ
cos 2a þ Txy sin 2a
¼
2
2
>
T
T
>
> Ttn ¼ Tnt ¼ t Tn ¼ n Tt
>
>
>
>
>
ðTyy Txx Þ
>
:
sin 2a þ Txy cos 2a
¼
2
Fig. 9.6 A surface aligned
with the n and t directions
rotated by a from the x and y
directions
ð9:39Þ
150
9
Now, consider the coordinate system change shown in Fig. 9.1, then
8
< Tx0 x0 ¼ Tnn ða ¼ hÞ
Ty0 y0 ¼ Tnn ða ¼ h þ p2Þ
: 00
Tx y ¼ Ty0 x0 ¼ Ttn ða ¼ hÞ ¼ Ttn ða ¼ h þ p2Þ
Tensors
ð9:40Þ
HW #9.22
Confirm that Eq. (9.40) leads to Eq. (9.16). Note that Ttn ða ¼ hÞ ¼ Ttn ða ¼
h þ p2Þ in Eq. (9.40), since there is a sign change when the coordinate system rotates
90° as shown in Fig. 9.7. This is also confirmed in Mohr’s circle, comparing the
shear components at A’ and B’ (or A and B) in Fig. 9.2.
To derive the principal values as the extreme values of the normal component,
consider
@Tnn
¼ ðTyy Txx Þ sin 2a þ 2Txy cos 2a ¼ 2Tnt ¼ 0
@a
ð9:41Þ
which confirms that the principal values are obtained when the shear component
vanishes. This is also confirmed in Fig. 9.2 showing D and E as the maximum and
minimum normal components, respectively, without any shear components. As for
the principal directions,
tan 2a ¼
2Txy
ðTxx Tyy Þ
ð9:42Þ
as a solution of Eq. (9.41). For 0 a\p (therefore, 0
nonsingular solutions, a1 and a2 , for which
2a\2p), there are two
8
Txx Tyy
ffi;
>
< cos 2a1 ¼ pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
Txx Tyy 2
2
xy
ffi
sin 2a1 ¼ pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
Txx Tyy 2
>
ffi;
: cos 2a2 ¼ pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
Txx Tyy 2
2
Txy
ffi
sin 2a2 ¼ pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
Txx Tyy 2
ð
2
2
Fig. 9.7 The shear
component of a tensor
changes its sign when the
coordinate system rotates by
90°
Þ þ Txy
2
Txx Tyy
ð
2
Þ þ Txy
T
ð
2
ð
2
Þ þ Txy
2
2
Þ þ Txy
ð9:43Þ
9.3 Principal Values and Principal Directions of Real Symmetric Tensors
151
HW #9.23
(1) Derive Eq. (9.43) from Eq. (9.42) and show that a1 and a2 are vertical to each
other, validating that two principal directions are orthogonal to each other.
These orthogonal principal directions can also be confirmed in Fig. 9.2, from
the angle between D and E, which correspond to the two principal values.
Derive Eq. (9.43) in Fig. 9.2, considering the angle between CA and CD, and
CA and CE.
(2) Confirm that the two principal values corresponding to a1 and a2 , respectively,
are
qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
8
< Tnn ¼ ðTxx þ Tyy Þ þ ðTxx Tyy Þ2 þ T 2 for a
xy
1
2
2
qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
: T ¼ ðTxx þ Tyy Þ ðTxx Tyy Þ2 þ T 2 for a
nn
xy
2
2
2
ð9:44Þ
which correspond to D and E, respectively, in Fig. 9.2.
(3) Calculate the eigenvalues and eigenvectors for a 2 2 real symmetric tensor
and confirm that they coincide with the principal directions and principal values
obtained in Eqs. (9.43) and (9.44), respectively.
(4) Confirm that the singular case of Eq. (9.42) is when Txy ¼ 0 and Txx ¼ Tyy , for
ðT þ T Þ
which the principal directions are indefinite and the principal value is xx 2 yy ,
which is the double root of the characteristic equation for the eigenvalue. For
this singular case, Mohr’s circle converges to a point at C.
HW #9.24
The extreme of the shear component
nt
(1) As for the extreme of the shear component, perform @T
@a ¼ 0 and confirm that
the normal component does not vanish. However, Tnn = Ttt.
(2) Confirm that there are two directions for the extreme of the shear component,
8
Txy
ffi;
>
< cos 2a1 ¼ pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
Tyy Txx 2
2
ðTyy Txx Þ
pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
ffi
sin 2a
1 ¼
Tyy Txx 2
>
: cos
sin 2a
2
ð
2a
2
2
Þ þ Txy
Txy
ffi;
¼ pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
Tyy Txx 2
ð
2
2
Þ þ Txy
ð
2
2
Þ þ Txy
2
ðTyy Txx Þ
ffi
¼ pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
Tyy Txx 2
2
ð
2
2
Þ þ Txy
for which
qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
8
< Tnn ¼ Ttt ¼ ðTxx þ Tyy Þ ; Tnt ¼ ðTyy Txx Þ2 þ T 2
xy
2
2
qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
: T ¼ T ¼ ðTxx þ Tyy Þ ; T ¼ ðTyy Txx Þ2 þ T 2
nn
tt
nt
xy
2
2
for a ¼ a
1
for a ¼ a
2
152
9
Tensors
as can be also confirmed in Mohr’s circle. Note that the magnitude of the extreme
shear stress is half of the difference between two principal values.
(3) Validate that the two directions for the extreme of the shear component are 90°
apart, but that they are located 45° apart from the principal directions, as also
can be confirmed in Mohr’s circle. The two extreme shear components have
difference in sign only because their directions are 90° apart as discussed with
Fig. 9.7. Therefore, the negative value of the shear component is not really the
minimum value but the value incurred by the coordinate system change by 90°.
(4) Confirm that the singular case of the extreme shear component is shared by that
of the extreme of the normal component.
References
Gurtin, M. E. (1982). An introduction to continuum mechanics (Vol. 158). Cambridge: Academic
press.
Lai, W. M., Rubin, D. H., Krempl, E., & Rubin, D. (2009). Introduction to continuum mechanics.
Oxford: Butterworth-Heinemann.
Nadai, A. (1950). Theory of flow and fracture of solids. New York: McGraw-Hill.
Chapter 10
Gradient, Divergence and Curl
The differential operator Nabla, r, is defined as
r¼
@
@
@
ex þ
ey þ e z
@x
@y
@z
ð10:1Þ
where the position vector, r = (x, y, z) in the rectangular Cartesian coordinate
system (with three unit base vectors, ex , ey and ez ). There are three mathematical
quantities based on this operator, which are extensively applied in mechanics.
Therefore, their main features are briefly reviewed here.
10.1
Gradient
For the following mathematical expression,
df ¼
df
dx
dx
ð10:2Þ
where f is a scalar function of a scalar variable x, df and dx are differentials, or
(infinitesimal) increments and df/dx (=f,x) is a derivative. The derivative, which
represents the slope of a tangential line here, is the one-dimensional version of the
gradient; i.e.,
df
df
df
df
df
;
df ¼ dr ¼ dx þ dy þ dz ¼
dx
dr
dx
dy
dz
df
;
dy
!0 1
dx
df @ A
dy ¼ rf dr
dz
dz
¼ ðgrad f Þ dr
ð10:3Þ
© Springer Nature Singapore Pte Ltd. 2018
K. Chung and M.-G. Lee, Basics of Continuum Plasticity,
https://doi.org/10.1007/978-981-10-8306-8_10
153
154
10
(a)
Gradient, Divergence and Curl
(b)
Fig. 10.1 a One-dimensional gradient and b two-dimensional gradient
Note that, in Eq. (10.2), dx at the end of a right term is an ‘input’ to the
derivative, f,x, and df is an ‘output’ generated by the derivative. As an input, the size
of dx is arbitrary as shown in Fig. 10.1a.
Now, extend Eq. (10.2) to a two-dimensional case,
df
df
df
df
;
df ¼ dr ¼ dx þ dy ¼
dx
dr
dx
dy
df
dy
dx
dy
0
1
dx
qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi pffiffiffiffiffiffiffiffiffiffiffiffiffi
2
2
dx þ dy
A
¼ rf dx2 þ dy2 @
dx
pffiffiffiffiffiffiffiffiffiffiffiffiffi
2
2
dx þ dy
¼ ðgrad f Þ ðdsÞb
ð10:4Þ
where dr is an input and df is an output generated by rf . The input is arbitrary with
its size, ds, and its direction is defined by a unit vector b, between the x and y axes.
Therefore,
df
¼ ðgrad f Þ b
ds
ð10:5Þ
which shows that the slope (known as the directional derivative in the direction of
b), df/ds, in an arbitrary direction between x and y axes defined by the unit vector b
is obtained from (grad f) by dot-product with b. Therefore, all slopes at an arbitrary
direction is the linear combination of the two slopes, df/dx and df/dy, if the surface,
f(x, y), is differentiable (or smooth). The relationship in Eq. (10.5) is valid for
Eq. (10.3) with the same physical implication for the three-directional case.
As an application, consider the two-dimensional surface in Fig. 10.1b, which
can be expressed as g(x, y, z) = constant. Therefore,
dg ¼
dg
dr ¼ 0
dr
ð10:6Þ
10.1
Gradient
155
Here, all the points are on the surface so that dr is the tangential to the surface;
consequently, dg/dr is the normal vector to the surface. Also, dg is the greatest if dr
(as an input) is chosen to be normal to the surface.
10.2
Divergence: Divergence Theorem, Heat Equation,
Work Rate and Virtual Work Principle
The divergence of a vector field defined by v is
div v ¼ r v ¼
dvx dvy dvz
þ
þ
ð¼ vi;i Þ
dx
dy
dz
ð10:7Þ
Now, consider material flow with the velocity of v(r) through the material
element, DV, in space as shown in Fig. 10.2. To
RR calculate the net out-flow (loss)
rate of the material, perform the surface integral, v dA, for the six surfaces. Then,
vx contributes only on the two surfaces facing the x-axis (since vx is tangential to
the other four surfaces); therefore, the net out-flow rate by vx becomes
vx ðx þ DxÞDyDz vx ðxÞDyDz, where the value with the superscript (*) means the
average of the surface. When the contributions by vy and vz are added up, the total
net out-flow rate becomes,
vx ðx þ DxÞDyDz vx ðxÞDyDz þ vy ðy þ DyÞDzDx
vy ðyÞDzDx þ vz ðz þ DzÞDxDy vz ðzÞDxDy
ð10:8Þ
which further becomes,
ZZ
lim
Dx;Dy;Dz!0
v dA ¼ ð
Fig. 10.2 Material flow
through the volume element
in space
@vx @vy @vz
þ
þ
ÞdV ¼ ðr vÞdV ¼ divðvÞdV ¼ ðvi;i ÞdV
@x
@y
@z
ð10:9Þ
156
10
Gradient, Divergence and Curl
after considering the following Taylor series,
@vx ðxÞ
Dx þ HOT
@x
@vy ðyÞ
Dy þ HOT
vy ðy þ DyÞ ¼ vy ðyÞ þ
@y
@v ðzÞ
vz ðz þ DzÞ ¼ vz ðzÞ þ z Dz þ HOT
@z
vx ðx þ DxÞ ¼ vx ðxÞ þ
ð10:10Þ
Consequently, the divergence of the velocity, vi,i (in the index and summation
notation for the rectangular Cartesian coordinate system), is the net out-flow rate
per unit volume.
Remark #10.1 The divergence theorem
When the relationship for the net out-flow rate obtained for a volume element is
extended for a whole continuum body shown in Fig. 1.8, the total net out-flow rate
becomes the volume integral of div(v)dV; i.e.,
ZZ
ZZZ
v dA ¼
divðvÞdV
ð10:11Þ
S: whole body surface
V: whole body
or, in the index and summation notation for the rectangular Cartesian coordinate
system,
ZZ
ZZZ
ðvi ni ÞdA ¼
ðvi;i ÞdV
ð10:12Þ
S: whole body surface
V: whole body
where dA = (dA)n and ni is the components of the unit vector n of the area dA in
the rectangular Cartesian coordinate system: the divergence theorem. The divergence theorem is applied in various ways in mechanics, especially for the derivations of the heat equation, the work rate and the virtual work principle, which
are reviewed here.
Remark #10.2 The heat equation
Consider the following Fourier heat conduction law for heat flow which states
that heat flows from high temperatures to low temperatures:
v ¼ KgradðUðrÞÞ ¼ KrðUðrÞÞ
ð10:13Þ
where U is the temperature and K is the thermal conductivity. Therefore, the total
in-flow rate of heat becomes, considering Eq. (10.9),
r vdV ¼ r ðKgradðUðrÞÞÞ ¼ r ðKrðUðrÞÞÞdV
ð10:14Þ
When K is uniform for the body and when heat generation per unit volume and
per unit time, Q(r, t), is also considered, the total heat increase rate becomes
10.2
Divergence: Divergence Theorem, Heat Equation …
157
ðKr rU þ QÞdV. By equating the heat increase with the rise in temperature, the
following heat equation is obtained:
Kr rU þ Q ¼ Kr2 U þ Q ¼ cq
@U
@t
ð10:15Þ
where c and q are the specific heat and the mass density, respectively. Here, r2 is
the Laplacian operator, defined as
r r ¼ r2 ¼
@2
@2
@2
þ
þ
@x2 @y2 @z2
ð10:16Þ
for a rectangular Cartesian coordinate system.
The heat equation is important for plasticity, especially when plastic deformation
occurs at a fast rate. In such a case, the external work provided for plastic deformation, which was briefly discussed in Fig. 2.2, is dissipated into heat and becomes
Q in Eq. (10.15) under more or less adiabatic conditions; therefore, the problem
becomes a coupled thermo-mechanical boundary value problem, in which the
heat and mechanical equations are solved simultaneously. However, if the deformation is slow enough, as assumed in most practical problems, the heat generated
cools off, keeping the material near room temperature, and only mechanical
equations are solved without involving the heat equation.
Note that there are three major second order linear partial differential
equations (PDE): the heat equation, the Laplace equation and the wave equation (to
be covered in Remark #10.8). The Laplace equation is
r2 ¼ 0
ð10:17Þ
One example case covered by the Laplace equation is the heat equation with @U
@t .
For such a case, the Laplace equation covers the temperature distribution in a
steady state (meaning that a physical quantity is not time dependent) when the heat
equation covers the transient temperature distribution from the initial to steady
state distributions. These three equations are also known as hyperbolic (for wave),
parabolic (for heat) and elliptic (for Laplace) equations. These alternative names
simply come from the similarities between their general form and that of conics (a
study on ellipse, parabola and hyperbola). These three equations have distinct
natures, which can be recognized by their solution scheme known as the method of
characteristics, which gives analytical solutions as well as numerical solutions,
depending on the complexity of their solutions.
Remark #10.3 The work rate per unit volume
The work rate by the external surface and body forces is the total sum of dFn v ¼
tn dA v and qbdV v; i.e.,
158
10
ZZZ
ZZ
W_ ¼
ZZ
dFn v þ
S: whole body surface
ZZ
qbdV v ¼
V: whole body volume
ZZZ
v ðrnÞdA þ
¼
S
ZZZ
Gradient, Divergence and Curl
S
ZZ
qbdV v ¼
ZZZ
tn dA v þ
V
S
V
ZZZ
vi rij nj dA þ
qbdV v
qvi bi dV
V
ððvi rij Þ;j þ qvi bi ÞdV
¼
V
where Eq. (8.15) is applied for the traction vector, tn, and the divergence theorem in
Eq. (10.12) is applied for the vector component, vi rij . Therefore,
W_ ¼
ZZZ
ZZZ
ððvi rij Þ;j þ qvi bi ÞdV ¼
ZZZ
V
ZZZ
ðqai Þvi dV þ
¼
V
ZZZ
ðrij;j þ qbi Þvi dV þ
V
ZZZ
rij Dij dV ¼
V
rij vi;j dV
V
i
d hq
ðvi vi Þ dV þ
dt 2
V
ZZZ
rij Dij dV
V
ð10:18Þ
where the first of the last two terms is the dynamic work rate per unit volume and
the second one is the work rate for deformation per unit volume. Integration of
Eq. (10.18) is the continuum mechanics version of Eq. (1.4), which is for particle
mechanics. When Eq. (1.28) is applied to deformable body statics,
w_ ¼ rij Dij ¼ r D
ð10:19Þ
@v
Note that vi,j in Eq. (10.18) is the component of the velocity gradient tensor, @x
(which is obtained by applying Eq. (10.3) for each component, f = vi, while r = x),
in a rectangular Cartesian coordinate system, which consists of the symmetric part,
@v
D, and the anti-symmetric part, W; i.e., @x
¼ D þ W (details will be discussed in
Sect. 8.3). Furthermore, note that rij W ij ¼ 0 (refer to HW #9.4 for proof).
Derivation here also rigorously proves that all energy (or external work applied) is
used for deformation in deformable body statics, for which Eqs. (1.27) and (1.28)
are valid so that translation and rotation occur virtually spontaneously.
Remark #10.4 The virtual work principle (also known as the principle of virtual
displacement)
In deformable body statics, there is a set of partial differential equations to solve,
Eq. (1.28), with boundary conditions, which consist of displacement boundary
conditions and traction boundary conditions. As for these boundary conditions,
three components at one boundary point may all be displacements or tractions.
Alternatively, only one or two of the components could be displacements while the
remaining could be tractions. Now, there are two sets of (differentiable) mechanical
quantities: displacement distributions which satisfy the displacement boundary
10.2
Divergence: Divergence Theorem, Heat Equation …
159
conditions (known as the kinematically admissible displacements) and stress
distributions which satisfy Newton’s partial differential equations, Eq. (1.28), and
the traction boundary conditions (known as the statically admissible stress distributions). Note that there are infinite numbers of possible kinematically admissible displacement distributions and statically admissible stress distributions which
are unrelated to each other. When they are imposed to be related by material
properties, there is one of each set, which are real solutions. Now, consider a third
set, which are comprised of displacement distributions and are similar to the
kinematically admissible displacement distributions except that these have zero
values wherever displacement boundary conditions are prescribed. This third set is
known as the virtual displacements and they are also unrelated to the statically
admissible stress distributions.
Between the infinite number of possible virtual displacements, du, and statically
admissible stress distributions, the following mathematical relationship is derived
for dW, known as the virtual work:
ZZ
ZZZ
dW ¼
dFn du þ
S: whole body surface
ZZ
¼
ZZZ
V: whole body volume
tn dA du þ
ZZ
qbdV du ¼
ZZZ
S
ZZ
S
ZZZ
du ðrnÞdA þ
S
ZZZ
V
dui rij nj dA þ
¼
qbdV du
qbi dui dV ¼
V
qbdV du
V
ððdui rij Þ;j þ qbi dui ÞdV
V
Therefore,
ZZZ
dW ¼
ZZZ
ððdui rij Þ;j þ qbi dui ÞdV ¼
V
ZZZ
¼
ZZZ
ðrij;j þ qbi Þdui dV þ
V
rij dui;j dV
V
rij deij dV
V
ð10:20Þ
where Eq. (1.28) is applied for the deformable body statics. Consequently, the
following relationship, known as the virtual work principle, is obtained:
ZZ
dW ¼
ZZZ
tn dA du þ
S
ZZZ
qbdV du ¼
V
ZZZ
rij deij dVÞ ð10:21Þ
trðrdeÞdVð¼
V
V
Note that dui;j in Eq. (10.20) is the component of the virtual displacement
gradient tensor, @ðduÞ
@x (which is obtained by applying Eq. (10.3) for each component,
160
10
Gradient, Divergence and Curl
f ¼ dui , while r = x), in a rectangular Catesian coordinate system, which consists of
the symmetric part, de, and the anti-symmetric part, d-; i.e, @ðduÞ
@x ¼ de þ d-.
Note that the derivation of the virtual work principle may seem similar with that
of the work rate; however, they are very different in their meanings. The work rate
is the mechanical relationship between real solutions and the virtual work principle
is instead a mathematical relationship between two independent (possible) virtual
displacements and statically admissible stress distributions. That being the case,
then, why is the virtual work principle important? The virtual work principle is an
alternative to Newton’s partial differential equations, Eq. (1.28), as its necessary
and sufficient conditions. Also, note that the work rate and the virtual work principle in Eqs. (10.18) and (10.21) are generally valid for deformable body statics, for
both the infinitesimal and finite deformation theories.
Mechanics often consists of sets of partial differential equations such as
Eq. (1.28) and the heat equation in Eq. (10.15) for example. For these partial
differential equations, their alternatives are available in integral form such as the
virtual work principle. These alternatives provide the basis of powerful (analytical
or) numerical solution methods such as the finite element method. The numerical
method directly applied for the differential equations is known as the finite difference method. To deal with plasticity, a good understanding of the finite element
method is mandatory as well as the subject of linear algebra, to which all numerical
methods converge.
HW #10.1
Since the virtual work principle is a mathematical relationship that may replace
Newton’s equations, Eq. (1.28), it can be directly derived from Eq. (1.28); i.e.,
ZZZ
ðrij;j þ qbi Þdui dV ¼ 0
V
Complete the derivation of Eq. (10.21) from this.
10.3
Curl: Potential Function in Line Integral and Linear
Elasticity
Curl is operated for a vector field, F(r), as
ex
@
curlðFðrÞÞ ¼ r FðrÞ ¼ @x
Fx
ey
@
@y
Fy
ez @F z @F y @F x @F z @F y @F x
@ ;
;
Þ
@z ¼ ð
@y
@z @z
@x @x
@y
Fz ð10:22Þ
10.3
Curl: Potential Function in Line Integral and Linear Elasticity
161
The importance of Eq. (10.22) is related to the following line integral:
Z
Z
FðrÞ dr ¼ ðF x ðrÞ dx þ F y ðrÞ dy þ F z ðrÞ dzÞ
ð10:23Þ
C
C
where C defines a curve (or a path) between an initial and an end position, ro and
r. The result of the line integral is not only dependent on the two initial and end
positions but it also generally depends on the curve C prescribes. A typical example
of the line integral is the work required to move a piece of cargo by dragging it from
ro to r. Here, assume that the dragging force is incurred by friction such that
FðrÞ ¼ jFðrÞjdr, which is tangential to the traveling path, C, with its magnitude
dependent on the road condition (or the amount of friction) in C. Then, the total work
is not only dependent on the length of travel between ro to r but also on the path C.
The line integral is occasionally independent of the path and only dependent on
the two positions. Such an example is the potential energy by gravity. Here, the
force to overcome gravity is aligned along the z-direction, F(r) = mg = mgez,
where m is the mass and g is the gravity in the z direction. In this case, the work is
mg(z − zo), known as the potential energy, regardless of the path between ro to r.
Path dependence/independence of the line integral is determined by F(r); i.e.,
curlðFðrÞÞ ¼ 0
ð10:24Þ
@F z @F y @F x @F z @F y @F x
¼
;
¼
;
¼
@y
@z @z
@x @x
@y
ð10:25Þ
or
is virtually the necessary and sufficient condition for the path independence of the
line integral, Eq. (10.23). The reason is explained here without rigorous mathematical proof (which involves Stokes’ theorem).
If the line integral is path independent, the result would only be position
dependent, implying that the result is a scalar function of a position vector, f(r),
which is known as the potential function of the line integral. Then, the integrand is
formed with the exact differential of the potential function; i.e.,
FðrÞ dr ¼ gradðf ðrÞÞ dr. Therefore,
@f @f @f
FðrÞ ¼ gradðf ðrÞÞ ¼ ð ; ; Þ ¼ ðF x ; F y ; F z Þ
@x @y @z
ð10:26Þ
Consequently, the condition, Eq. (10.25), is valid considering the following
identical equations.
@F z @F y
@ 2 f @F x @F z
@ 2 f @F y @F x
@2f
;
;
¼
¼
¼
¼
¼
¼
@y@z @z
@x@z @x
@y@x
@y
@z
@x
@y
ð10:27Þ
162
10
Gradient, Divergence and Curl
When F(r) of a line integral satisfies the condition, Eq. (10.25), the line integral
is path-independent and its potential function f(r) is obtained from Eq. (10.26), the
relationship between F and f. In the example of potential energy by gravity,
Fx = Fy = 0 and Fz = mg; therefore, Eq. (10.25) is satisfied and its potential is also
easily obtained as mg(z − zo).
Remark #10.5 For the dynamic term in Eq. (10.18) (qai Þvi ¼ dtd q2 ðvi vi Þ , q2 ðvi vi Þ
R
R
is the potential function for the line integral of ðqai Þvi dt ¼ ðqvi Þdvi , in which
the integrand satisfies Eq. (10.24).
Remark #10.6 The symmetric elastic modulus tensor
In deformable body statics, the path-independence theory of the line integral plays
an important role for elasticity. For the elastic modulus tensor, Cijkl, of the linear
elasticity, it is symmetric; i.e., Cijkl = Cklij (separate from Cijkl = Cjikl and
Cijkl = Cijlk by the symmetry of the stress and (infinitesimal) strain tensors defined
in Eqs. (8.1) and (1.29), respectively). In linear elasticity, stress is a function of
strain as shown in Eq. (1.30); i.e., stress is determined by current deformation
defined with the strain, while it is not dependent on deformation history. This is
quite different from plasticity, in which stress is dependent on deformation history
as discussed with Fig. 2.4. For elasticity, not only the stress but the work by
deformation (to be stored) is also considered to be a function of strain and not
dependent on deformation history. Therefore, while considering Eqs. (10.19) and
(1.29), the work (per volume) by deformation for linear elasticity becomes,
Z
wðEÞ ¼
Z
_ ¼
wdt
Z
rij vi;j dt ¼
Z
rij dui;j ¼
Z
rij ðEÞdEij ¼
rðEÞ dE ð10:28Þ
Equation (10.28) is the line integral for r and the independent variable E, which
are nine-dimensional vectors as done in Eq. (8.2) for the stress, respectively, and
thus replacing three-dimensional F and r in Eq. (10.23). Here, w is the potential
function and
rðEÞ ¼ gradðwðEÞÞ or
rij ðEÞ ¼
@w
@E ij
ð10:29Þ
so that the following identical equations, curlðrðEÞÞ ¼ 0, are obtained:
@rij
@2w
@2w
@rkl
¼
¼ C ijkl ¼
¼
¼ Cklij
@Eij @E kl @E ij
@Ekl @E kl @Eij
ð10:30Þ
Also, from Eq. (10.29), the potential function w is easily obtained as
1
1
1
1
w ¼ r Eð¼ rij Eij Þ ¼ E CEð¼ C ijkl E ij Ekl Þ
2
2
2
2
ð10:31Þ
10.3
Curl: Potential Function in Line Integral and Linear Elasticity
163
Now, for the generalized Hooke’s Law (the constitutive law for linear elasticity): rij ¼ Cijkl Ekl [C: the elastic modulus as a symmetric fourth-order tensor
discussed in Eqs. (9.14) and (10.30)],
1 0 1 0
r1
C11
rxx
B ryy C B r2 C B C21
C B C B
B
B rzz C B r3 C B C31
C B C B
B
B rxy C ¼ B r4 C ¼ B C41
C B C B
B
@ ryz A @ r5 A @ C51
rxz
C61
0 r6
C11 C12 C13
B C21 C22 C23
B
B C31 C32 C33
¼B
B C41 C42 C43
B
@ C51 C52 C53
C61 C62 C63
0
C12
C22
C32
C42
C52
C62
C14
C24
C34
C44
C54
C64
C13
C23
C33
C43
C53
C63
C15
C25
C35
C45
C55
C65
1
10
E1
C14 C15 C16
C
B
C24 C25 C26 C
E2
C
CB
C
C
B
C34 C35 C36 CB
E3
C
C
B
C44 C45 C46 CB c4 ð¼ 2E4 Þ C
C
C54 C55 C56 A@ c5 ð¼ 2E5 Þ A
c61
C64 1
C0
ð¼ 2E6 Þ
65 C66
Exx
C16
C
B
Eyy
C26 C
CB
C
C
C
B
Ezz
C36 CB
C
C
B
C46 CB cxy ð¼ 2Exy Þ C
C
C56 A@ cyz ð¼ 2Eyz Þ A
cxz ð¼ 2Exz Þ
C66
1
Then, Eij ¼ Cijkl
rkl ¼ Sijkl rkl (S = C−1: the elastic compliance as a symmetric
fourth-order tensor)
1 0 1 0
Exx
E1
S11
B Eyy C B E2 C B S21
C B C B
B
B Ezz C B E3 C B S31
C B C B
B
B cxy C ¼ B c4 C ¼ B S41
C B C B
B
@ cyz A @ c5 A @ S51
cxz
S61
0 c6
S11 S12 S13
B S21 S22 S23
B
B S31 S32 S33
¼B
B S41 S42 S43
B
@ S51 S52 S53
S61 S62 S63
0
Orthorhombic crystal structures:
y
z
x
S12
S22
S32
S42
S52
S62
S14
S24
S34
S44
S54
S64
S13
S23
S33
S43
S53
S63
S15
S25
S35
S45
S55
S65
10 1
r1
S14 S15 S16
B r2 C
S24 S25 S26 C
CB C
B C
S34 S35 S36 C
CB r3 C
C
C
S44 S45 S46 CB
B r4 C
A
@
S54 S55 S56
r5 A
S64 1S0
S1
r6
65
66
rxx
S16
C
B
S26 C
CB ryy C
C
B
S36 CB rzz C
C
C
B
S46 C
CB rxy C
A
@
S56
ryz A
S66
rxz
164
10
Gradient, Divergence and Curl
Normal stresses introduce normal strains and shear stresses introduce shear
strains and vice versa.
1 0 1 0
10 1
Exx
r1
E1
S11 S12 S13 0
0
0
CB r2 C
B Eyy C B E2 C B S21 S22 S23 0
0
0
C B C B
CB C
B
B Ezz C B E3 C B S31 S32 S33 0
B C
0
0 C
C¼B C¼B
CB r3 C
B
C
C
B cxy C B c4 C B 0
0
0 S44 0
0 CB
C B C B
B
B r4 C
A
@ cyz A @ c5 A @ 0
@
0
0
0 S55 0
r5 A
cxz
0
0
0
0 10
0 S1
r6
66
0 c6
S11 S12 S13 0
rxx
0
0
C
B S21 S22 S23 0
B
0
0 C
CB ryy C
B
C
B S31 S32 S33 0
B
0
0 CB rzz C
C
¼B
C
B 0
B
0
0 S44 0
0 C
CB rxy C
B
A
@ 0
@
0
0
0 S55 0
ryz A
0
0
0
0
0 S66
rxz
0
Cubic crystal structures:
z
y
x
1 0 1
E1 ¼ Exx
E
B E2 ¼ Eyy C B m
C B E
B
B E3 ¼ Ezz C B m
C B E
B
B c4 ¼ cxy C ¼ B 0
C B
B
@ c5 ¼ cyz A @ 0
c6 ¼ cxz
0
0
Em
1
E
Em
0
0
0
Em
Em
0
0
0
0
0
0
1
G
0
0
0
0
0
0
0
1
E
1
G
10
1
0
r1 ¼ rxx
C
B
0C
CB r2 ¼ ryy C
C
B
0 CB r3 ¼ rzz C
C
C
B
0C
CB r4 ¼ rxy C
A
@
0
r5 ¼ ryz A
1
r6 ¼ rxz
G
where the constant E is Young’s modulus, v is Poisson’s ratio and G is the shear
modulus.
1 0 Eð1mÞ
r1 ¼ rxx
ð1 þ mÞð12mÞ
Em
B r2 ¼ ryy C B
B
C B
ð1
þ mÞð12mÞ
B r3 ¼ rzz C B
B
Em
B
C
ð1 þ mÞð12mÞ
B r4 ¼ rxy C ¼ B
B
C B
0
@ r5 ¼ ryz A B
@
0
r6 ¼ rxz
0
0
Em
ð1 þ mÞð12mÞ
Eð1mÞ
ð1 þ mÞð12mÞ
Em
ð1 þ mÞð12mÞ
0
0
0
Em
ð1 þ mÞð12mÞ
Em
ð1 þ mÞð12mÞ
Eð1mÞ
ð1 þ mÞð12mÞ
0
0
0
0
0
0
0
0
G
0
0
0
0
G
0
10
1
E1 ¼ Exx
CB E ¼ E C
0 CB 2
yy C
CB
E3 ¼ Ezz C
C
B
C
0 CB
c4 ¼ cxy C
C
B
C
0 C@
A c5 ¼ cyz A
0
c6 ¼ cxz
G
0
10.3
Curl: Potential Function in Line Integral and Linear Elasticity
165
HW #10.2
Confirm C from S for cubic structures.
HW #10.3
Isotropic linear elasticity
There are three material properties, E, v and G, for cubic structured linear elastic
materials. For linear isotropic elasticity, there are only two independent properties
and there is the following relationship between E, m and G: G ¼ 2ð1Eþ mÞ. Derive this
relationship.
(Hint: The main idea is that, for an isotropic case, the components of the
symmetric fourth-order tensors C and S, transformed following Eqs. (9.14) and
(9.15), remain the same before and after transformation, regardless of any particular
change in the coordinate system by R. Based on this idea, consider the follow
particular stress for simplicity:
r¼
S
0
0
S
Now, calculate its strain in two ways, when the coordinate system changes by
45°. In the first way, calculate strain in the original coordinate system using
S discussed in HW #10.2 for the cubic structured case and then calculate the strain
in the new coordinate system. In the second way, calculate stress in the new
coordinate system and then obtain the strain in the new coordinate system using
S for the cubic structured case. Note that S in the original and new coordinate
system remains the same. Furthermore, the strains in the new coordinate system
found by the two methods described should also be the same. Mohr’s circle is
convenient to use to obtain stress or strain in the new coordinate system.)
HW #10.4
Isotropic linear elasticity based on Lamé’s constants
The constitutive law of isotropic linear elasticity, which has two independent
material constants, can be conveniently expressed when the two Lamé’s constants
mE
are used: k ¼ ð1 þ mÞð12mÞ
and G; i.e.,
rij ¼ 2GEij þ kEkk dij
ð10:32Þ
Confirm this.
Remark #10.7 Compatibility conditions for the infinitesimal strain
The infinitesimal strain for linear elasticity is defined in Eq. (1.29) as the gradient of
the displacement u(X). Therefore, the displacement is considered to be a potential
function of the line integral of the strain in which the strain should satisfy identical
equations corresponding to r ðr EÞ. These identical equations are the following compatibility conditions of the infinitesimal strain in order for it to have a
potential function, the displacement distribution, from which the strain is defined:
166
10
@ 2 Exx
@Y 2
@ 2 Eyy
@Z 2
@ 2 Exx
@Z 2
@ 2 Exx
@Y@Z
@ 2 Eyy
@X@Z
@ 2 Ezz
@X@Y
þ
þ
þ
¼
¼
¼
@ 2 Eyy
@ 2 Exy
@X 2 ¼ 2 @X@Y
@ 2 Eyz
@ 2 Ezz
@Y 2 ¼ 2 @Y@Z
@ 2 Ezz
@ 2 Exz
@X 2 ¼ 2 @X@Z
@Eyz
@Exz
@
@X ð @X þ @Y
@Exy
@Exz
@
@Y ð @Y þ @Z
@E
@Eyz
xy
@
@Z ð @Z þ @X
þ
þ
þ
Gradient, Divergence and Curl
@Exy
@Z Þ
@Eyz
@X Þ
@Exz
@Y Þ
ð10:33Þ
HW #10.5
Considering the definition of the infinitesimal strain in Eq. (1.29), validate the
compatibility condition in Eq. (10.33).
Remark #10.8 Wave equations for isotropic linear elasticity
There are two one-dimensional constitutive laws for isotropic linear elasticity:
(
rxx ¼ ð1 þEð1mÞ
mÞð12mÞ Exx
ð10:34Þ
rxy ¼ 2GExy
When these are applied to Cauchy’s equations of motion for infinitesimal
deformation,
8
< drxx ¼ Eð1mÞ dExx ¼ Eð1mÞ d2 u2x ¼ q d 2 u2x
dX
ð1 þ mÞð12mÞ dXh
ð1 þ mÞð12mÞ
dX
dt
i
2
2
: drxy ¼ 2G dExy ¼ 2G 1 d ðduy Þ ¼ G d u2y ¼ q d u2y
2 dX dX
dX
dX
dX
dt
in which ux = ux(X) and uy = uy(X) are the only non-vanishing displacement
components for the first and second cases, respectively, and the body force is
ignored. These two then become the following one-dimensional wave equations
( Eð1mÞ 2
2
2
ðð1 þ mÞð12mÞ ddXu2x Þ ¼ ðk þ 2GÞ ddXu2x ¼ q ddtu2x
ð10:35Þ
d2 u
d2 u
G dX 2y ¼ q dt2y
The wave (in the x-direction) of the first equation is aligned with its propagation
direction (in the x-direction) and it is called the dilatational (or irrotational) wave,
while the wave (in the y-direction) of the second equation is vertical to its propagation direction (in the x-direction) and it is called the equivoluminal (or shear,
distortional, rotational) wave. Note that, for the initial condition of
uðX; t ¼ 0Þ ¼ f ðXÞ, their solutions are uðX; tÞ ¼ f ðX ctÞ (obtained by the method
qffiffiffiffiffiffiffiffiffiffiffiffiffi
qffiffiffi
of characteristics) with c ¼ ðk þq2GÞ and c ¼ Gq , respectively, as can be easily
confirmed. Therefore, c is called the phase velocity of the wave.
2
The wave equation is significant for statics of plasticity, for which q ddtu2x 1:0
in the wave equation, with the following reason. The static implicit code, while
being accurate, does not necessarily provide solutions to practical industrial
10.3
Curl: Potential Function in Line Integral and Linear Elasticity
167
forming problems due to its problematic intrinsic numerical divergence. Therefore,
the dynamic explicit code is popular in solving industrial problems. However, its
solutions are not as accurate as those of the static implicit code and the time
required for computation is impractically long. To enhance the computation;
therefore, the mass scaling is performed by increasing the mass density, q, for the
dynamics code, which decreases the phase velocity, c. Thereby, the wave (and
deformation) propagation speed slows and the size of the stable discrete time
increment for the convergence of numerical solutions increases. As the size of the
stable discrete time increment increases, fewer numerical steps are required to reach
the total time. Eventually, computational time decreases. However, there is a limit
to increasing the mass density because increasing the density also increases the
2
dynamic effect, q ddtu2x , which should be very small.
Remark #10.9 Hyper-elasticity and hypo-elasticity for finite deformation
For linear elasticity, the stress and the work are functions of the infinitesimal strain,
while the stress is the gradient of the work (per unit volume) as shown in
Eq. (10.29). The idea is extended for finite deformation in hyper-elasticity,
replacing Eq. (10.29) with the appropriately selected values of stress and finite
strain measures (such as the finite strain tensor, which is discussed in Chap. 11). Its
application covers the nonlinear elastic behavior of rubber shown in Fig. 2.3. The
constitutive law of linear elasticity in Eq. (1.30) is also extended for finite deformation as an incremental form; i.e.,
drij ¼ Cijkl dekl ðor dr ¼ CdeÞ
ð10:36Þ
known as hypo-elasticity. Here, the components of the tensor C are not constants
anymore in general, and the stress increment is the objective (or Jaumann) stress
increment, while the (natural) strain increment is derived from the rate of
deformation tensor, which are discussed in Chaps. 16 and 11, respectively.
10.4
Curvilinear Coordinate System
The rectangular Cartesian coordinate system is powerful and convenient, especially
when utilizing index notation and the summation convention. However, occasionally a newly defined coordinate system is more convenient and useful to apply
as is the case with symmetry such as axi-symmetry or spherical symmetry.
Therefore, basic concepts to consider when dealing with a curvilinear coordinate
system are discussed here.
A new coordinate system with variables, u, v and w, is defined by describing a
position vector r as, based on the rectangular Cartesian coordinate system,
r ¼ ðxðu; v; wÞ; yðu; v; wÞ; zðu; v; wÞÞ
ð10:37Þ
168
10
Gradient, Divergence and Curl
Fig. 10.3 Defining base
vectors and the differential
volume dV in a coordinate
system
Note that r(u), r(v) and r(w) are three curves, intersecting each other as shown in
Fig. 10.3. Now,
dr ¼
@r
@r
@r
du þ
dv þ
dw
@u
@v
@w
ð10:38Þ
@r @r
@r
where @u
, @v and @w
are tangential vectors at an intersection point A for three curves,
@r
r(u), r(v) and r(w), respectively (here, @u
is obtained by applying Eq. (10.2) for each
component, x(u), y(u) and z(u)). These tangential vectors are the base vectors of this
coordinate system, however their sizes may not be unit, and they may not be
vertical to each other. They also may vary in space in general.
For a continuum body, the whole body consists of differential volumes, dV,
which are defined independently for each coordinate system, considering the newly
defined three base vectors, as
@r
@r
@r
@r
@r
@r
@r
@r
@r
du dvÞ dw ¼ ð dv dwÞ du ¼ ð dw duÞ dv
@u
@v @w
@v
@w
@u
@w
@u
@v
@x @y @z x;w y;w z;w @w @w @w @y
@x
@z dudvdw ¼ x;
y;
z;
¼ @u
dudvdw ¼ Jdudvdw
u
u
u
@u
@u
@x @y @z x;v y;
z;
v
v
dV ¼ ð
@v
@v
@v
ð10:39Þ
where the determinant part is known as the Jacobian. Applying Eq. (10.39), the
triple integral with the change of the coordinate system becomes
ZZZ
ZZZ
f ðx; y; zÞdV ¼
V
ZZZ
f ðx; y; zÞdxdydz ¼
V
f ðu; v; wÞJdudvdw
V
ð10:40Þ
10.4
Curvilinear Coordinate System
169
In the case of the double integral, Eq. (10.40) reduces to
ZZ
ZZZ
ZZ
f ðx; yÞdA ¼
f ðx; yÞdxdy ¼
f ðu; vÞJdudv
A
A
ð10:41Þ
A
with the differential area, dA, defined as
@r
@r x;u
dA ¼ du dv ¼ x;v
@u
@v
y;u dudv ¼ Jdudv
y;v ð10:42Þ
HW #10.5
Covariant and contravariant base vectors
@r @r
@r
The set of base vectors @u
, @v and @w
defined in Eq. (10.38) is called the natural
basis of the curvilinear system (also known as covariant base vectors). Here, they
@r
@r
@r
are newly denoted as @u
¼ g1 , @v
¼ g2 , @w
¼ g3 , respectively, for the index notation.
Then, a new set of three base vectors, known as the contravariant base vectors are
defined as
gi g j ¼
1
0
for i ¼ j
for i 6¼ j
ð10:43Þ
Now, for a vector v,
v ¼ v i gi ¼ v j g j
ð10:44Þ
considering the summation convention. Then,
v i ¼ gi v
v i ¼ gi v
ð10:45Þ
where vi and vi are the contravariant components and the covariant components
of a vector v, respectively. Derive Eq. (10.45). When gi¼1;2;3 are unit base vectors
and orthogonal to each other, differences between covariant and contravariant base
vectors and their components disappear.
HW #10.6
Cylindrical coordinate system
For the cylindrical coordinate system with variables, r, h and z,
x ¼ r cosh; y ¼ r sinh; z ¼ z
with r 0; 0
h
2p
ð10:46Þ
Derive three base vectors, r;r ¼ coshex þ sinhey , r;h ¼ rsinhex þ rcoshey , r;z ¼
ez and dV ¼ rdrdhdz. Also plot them along with the r-, h- and z-curves at an
intersection.
170
10
Gradient, Divergence and Curl
HW #10.7
Spherical coordinate system
For the spherical coordinate system with variables, r, h and /,
x ¼ r cosh sin/; y ¼ r sinh sin/; z ¼ r cos/
with
r 0; 0
h
2p; 0
/
p
ð10:47Þ
Derive
three
base
vectors,
r;r ¼ coshsin/ex þ sinhsin/ey þ cos/ez ,
r;h ¼ r sinhsin/ex þ rcoshsin/ey ,
r;/ ¼ rcoshcos/ex þ rsinhcos/ey rsin/ez
and dV ¼ r 2 sinhdrdhd/. Then, plot them along with r-, h- and /- curves at an
3
2
intersection. Also, calculate the volume, 4pR
3 , and the surface area, 4pR , of a sphere
with the radius of R, based on the spherical coordinate system.
Remark #10.10 The differential operator Nabla, r, for the cylindrical coordinate
system
The differential operator Nabla, r, defined in Eq. (10.1) for the rectangular
Cartesina coordinate system is re-derived here for the cylindrical coordinate system.
In deriving Eq. (10.1), f = f(x, y, z) so that df = f,xdx + f,ydy + f,zdz = rf dr where
rf ¼ Aex þ Bey þ Cez and dr ¼ dxex þ dyey þ dzez . Therefore, A = f,x, B = f,y and
C = f,z, which leads to Eq. (10.1). Similarly, f = f(r, , z) for the cylindrical coordinate system such that df = f,rdr+ f ;h dh + f,zdz = rf dr, while rf ¼
Aer þ Beh þ Cez based on three unit base vectors and dr ¼ r;r dr þ r;h dh þ r;z dz,
considering Eq. (10.38). Since the three base vectors are, r;r ¼ coshex þ sinhey ,
r;h ¼ r sinhex þ r coshey , r;z ¼ ez as obtained in HW #9.3, the three unit base
vectors are er ¼ coshex þ sinhey , eh ¼ sinhex þ textcoshey and ez ¼ ez , which are
vertical to each other. Therefore, dr ¼ er dr þ reh dh þ ez dz so that A = f,r,
B = f ;h =r and C = f,z, which leads to
r¼
@
1 @
@
er þ
eh þ ez
@r
r @h
@z
ð10:48Þ
HW #10.8
The differential operator Nabla, r, for the spherical coordinate system.
Derive the following differential operator Nabla, r, for the spherical coordinate
system:
r¼
@
1 @
1 @
er þ
eh þ
e/
@r
r sin/ @h
r @/
ð10:49Þ
where er , eh and e/ are unit base vectors.
HW #10.9
The operator Laplacian, r2 ð¼r rÞ, for the cylindrical and spherical coordinate
systems
10.4
Curvilinear Coordinate System
171
The operator Laplacian, r2 ð¼ r rÞ, defined in Eq. (10.16) for a rectangular
coordinate system, becomes
r2 ¼
@2
1@
1 @2
@2
þ
þ
þ
r @r r 2 @h2 @z2
@r 2
ð10:50Þ
and
r2 ¼
@2
2@
1
@2
1 @2
cot / @
þ
þ
þ
þ 2
2
2
r @r r 2 sin / @h
r 2 @/2
r @/
@r 2
ð10:51Þ
for cylindrical and spherical coordinate systems, respectively. Derive each (1) as,
r2 ð¼r rÞ considering Eqs. (10.48) and (10.49) (2) by applying the chain rules
between the variables of the coordinate systems to Eq. (10.16).
References
McClintock, F. A., & Argon, A. S. (1966). Mechanical behavior of materials. Books.
Hosford, W. F. (2010). Mechanical behavior of materials. Cambridge University Press.
Chapter 11
Kinematics and Strain
Consider the changes in position and shape of a continuum body with time, t, as
shown in Fig. 11.1. Then,
xðX; tÞ ¼ X þ uðX; tÞ with X ¼ xðX; t ¼ 0Þ
ð11:1Þ
where x is the current position vector, X is the initial position vector (or the
reference position vector at t = t0) and u is the displacement vector. When there is
@u
only translation (without rotation and deformation), u is uniform so that @X
¼ 0.
@u
Here, @X, known as the displacement gradient (with respect to X) is obtained by
applying Eq. (10.3) for each component, f = ui, while r = X, in the rectangular
@u
Cartesian coordinate system. When there is only rotation, @X
6¼ 0 and there are no
@u
changes in relative position. Furthermore, when there is only deformation, @X
6¼ 0
while there are changes in relative position. There are two kinds of deformation:
extensional deformation, which involves change in length, and shear deformation,
which involves change in angle (therefore, shape change).
11.1
Infinitesimal Strain Tensor
@u
Ways in which to sort out changes in length and angle as well as rotation from @X
are discussed here, when deformation is infinitesimal; i.e., x X. As for deformation of a material element in a continuum body, deformation of a volume element, DV, is considered. For a uniform deformation within an element, the volume
element remains as a parallelogram during deformation. As such, its three vertical
lines in the initial configuration are considered for changes in length and angle as
well as rotation: DX, DY and DZ shown in Fig. 11.2.
© Springer Nature Singapore Pte Ltd. 2018
K. Chung and M.-G. Lee, Basics of Continuum Plasticity,
https://doi.org/10.1007/978-981-10-8306-8_11
173
174
11
Kinematics and Strain
Fig. 11.1 The change in
position and shape of a
continuum body
Fig. 11.2 A volume element
in the initial configuration
As for DX, its initial two ends A and B move to A′ and B′, respectively, as shown
in Fig. 11.3, where vector AB is (DX, 0, 0) and vector A′B′ = (DX + uBx uAx ,
uBy uAy , uBz uAz ), while
uBx uAx ¼ ux ðX þ DXÞ ux ðXÞ
uBy uAy ¼ uy ðX þ DXÞ uy ðXÞ
ð11:2Þ
uBz uAz ¼ uz ðX þ DXÞ uz ðXÞ
Here, for infinitesimal deformation,
length becomes,
Exx ¼ lim
uBx uAx uBy uAy uBz uAz
DX ; DX ; DX
qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
ðDX þ ðuBx uAx ÞÞ2 þ ðuBy uAy Þ2 þ ðuBz uAz Þ2 DX
DX
uBx ðX þ DXÞ uAx ðXÞ @ux
¼
lim
DX!0
DX
@X
DX!0
1:0. Then, the change in
ð11:3Þ
11.1
Infinitesimal Strain Tensor
175
Fig. 11.3 The length and angle change of DX
after considering Eq. (11.2) and manipulation with the Taylor series. As for
changes in the two angle,
uBy uAy
uBy uAy
B00 C
uB uAx
lim
ð1 x
Þ
lim arctanð 0 Þ ¼ lim
B
A
DX!0
DX!0 ðDX þ ux ux Þ
DX!0
AC
DX
DX
uBy uAy @uy
¼
¼ hyx
DX!0
DX
@X
uB uAz
B000 C
@uz
¼
hzx ð lim arctanð 0 ÞÞ ¼ lim z
DX!0
DX!0
AC
DX
@X
lim
ð11:4Þ
where the first subscript denotes the direction of rotation and the second subscript
indicates the direction of the rotating line (following the sign convention in which
an angle is positive when the line in the positive direction rotates in the positive
direction or when the line in the negative direction rotates in the negative direction;
otherwise, the angle is negative. See Fig. 11.5 for example).
Similarly, for DY,
uBx uAx
uB ðY þ DYÞ uAx ðYÞ @ux
¼
¼ lim x
DY!0
DY!0
DY
DY
@Y
uBy uAy
uBy ðY þ DYÞ uAy ðYÞ @uy
¼
¼ lim
Eyy ¼ lim
DY!0
DY!0
DY
DY
@Y
uBz uAz
uBz ðY þ DYÞ uAz ðYÞ @uz
¼ lim
hzy ¼ lim
¼
DY!0
DY!0
DY
@Y
DY
hxy ¼ lim
ð11:5Þ
176
11
Kinematics and Strain
and, for DZ,
uBx uAx
uB ðZ þ DZÞ uAx ðZÞ @ux
¼
¼ lim x
DZ!0
DY!0
DZ
DZ
@Z
B
A
B
A
uy uy
uy ðZ þ DZÞ uy ðZÞ @uy
¼
¼ lim
hyz ¼ lim
DZ!0
DY!0
DZ
DZ
@Z
B
A
B
A
u uz
u ðZ þ DZÞ uz ðZÞ @uz
¼ lim z
Ezz ¼ lim z
¼
DZ!0
DY!0
DZ
@Z
DZ
hxz ¼ lim
ð11:6Þ
In all, there are three line changes and six angle changes as summarized in Fig. 11.4
and they are stored in a matrix known as the displacement gradient; i.e.,
0
Exx
@ hyx
hzx
hxy
Eyy
hzy
1 0 @ux
hxz
@X
B y
hyz A ¼ @ @u
@X
@uz
Ezz
@X
@ux
@Y
@uy
@Y
@uz
@Y
@ux
@Z
@uy
@Z
@uz
@Z
1
@u
C
A ¼ ruðXÞ ð Þ
@X
ð11:7Þ
Now, in order to separate the (rigid body) rotation and the change in angle by
deformation from ru, decompose it into symmetric and anti-symmetric ones; i.e.,
du ¼ duE þ duX
Fig. 11.4 Changes of three lines and six angles for the volume element, dV
ð11:8Þ
11.1
Infinitesimal Strain Tensor
where
with
(
0
Exx
177
duE ¼ EdX ¼ 12 ðruðXÞÞ þ ðruðXÞÞT dX
duX ¼ XdX ¼ 12 ðruðXÞÞ ðruðXÞÞT dX
Exy
Exz
ð11:9Þ
1
B
C 1
ðruðXÞÞ þ ðruðXÞÞT
E ¼ @ Eyx Eyy Eyz A ¼
2
Ezx Ezy Ezz
0
1
Xxx Xxy Xxz
B
C 1
ðruðXÞÞ ðruðXÞÞT
X ¼ @ Xyx Xyy Xyz A ¼
2
Xzx Xzy Xzz
0
1 0
0
0
ðhxy hyx Þ ðhxz hzx Þ
1B
C B
0
ðhyz hzy Þ A ¼ @ xz
¼ @ ðhxy hyx Þ
2
ðhxz hzx Þ ðhyz hzy Þ
0
xy
xz
0
xx
1
xy
C
xx A
0
ð11:10Þ
Then, the relative displacement generated by the anti-symmetric part represents
rotation, as confirmed by operating dX, which are on the x-y plane; i.e.,
0
0
du ¼ XdX ¼ @ xz
xy
xz
0
xx
1
10
1 0
xy
dX
xz dY
xx A@ dY A ¼ @ xz dX A
0
0
0
ð11:11Þ
The relative displacement by the anti-symmetric part in Eq. (11.11) is vertical to
dX and its size is proportional to the size of dX (=ds); complying with the relative
displacement of the two ends of dX, which is in rigid-body rotation with x ¼ xz ez :
0
ex
du ¼ x dX ¼ @ 0
dX
ey
0
dY
1
1 0
ez
xz dY
xz A ¼ @ xz dX A
0
0
ð11:12Þ
A similar procedure performed for dX on the y-z and z-x planes, considering the
rigid-body rotation, x ¼ xx ex þ xy ey þ xz ez , validates that the anti-symmetric part
accounts for rigid body rotation.
1 @uz @uy
1
xx ¼ ð
Þ ¼ ðhzy hyz Þ
2 @Y
2
@Z
1 @ux @uz
1
Þ ¼ ðhxz hzx Þ
xy ¼ ð
2 @Z @X
2
1 @uy @ux
1
xz ¼ ð
Þ ¼ ðhyx hxy Þ
2 @X @Y
2
ð11:13Þ
178
11
Kinematics and Strain
Consequently, the remaining symmetric part accounts for the length and angle
changes by deformation; i.e.,
@ux
@uy
@ux
; Eyy ¼
; Ezz ¼
ð: normal strainsÞ
@X
@Y
@Z
9
1 @ux @uy
1
1 >
Exy ¼ ð
þ
Þ ¼ Eyx ¼ ðhyx þ hxy Þ ¼ cxy >
>
>
2 @Y
2
2 >
@X
>
>
=
1 @uy @uz
1
1
þ
Þ ¼ Ezy ¼ ðhzy þ hyz Þ ¼ cyz ð: shear strainsÞ
Eyz ¼ ð
2 @Z
2
2 >
@Y
>
>
>
>
1 @ux @uz
1
1 >
;
þ
Þ ¼ Ezx ¼ ðhzx þ hxz Þ ¼ cxz >
Exz ¼ ð
2 @Z
2
2
@X
Exx ¼
ð11:14Þ
In summary, two factors contribute to relative displacement, du ¼ ðruÞdX: (local)
rigid body rotation and deformation. The symmetric part, E, known as the
infinitesimal strain tensor, accounts for the contributions from deformation, for
which changes in length and angles are identified as normal and shear strains,
respectively. Note that engineering shear strains, cxy ; cyz ; cxz , which are twice as
large as shear strains, are also commonly used, especially for the constitutive law.
The anti-symmetric part, X, known as the infinitesimal rotation tensor, accounts
for the contributions from rigid body rotation.
EX #11.1
The changes in angle on the x-y plane are decomposed into the shear strain, 0.002,
and rigid-body rotation by x ¼ 0:001ez in Fig. 11.5.
Remark #11.1 Rotation is not a vector
Note that rigid-body rotation, x ¼ xx ex þ xy ey þ xz ez , is not a vector since the
result is dependent on the order of rotation. To confirm this, perform the following
exercise: Consider a book with the coordinate system situated at its center. Then,
rotate it in two ways for x ¼ 90 ex þ 90 ey ; (1) rotate 90 ex first and then 90 ey
(2) rotate 90 ey first and then 90 ex . The exercise confirms that the rotation is not a
vector; however, it is approximately a vector, if the amount is infinitesimal, as is the
case here.
Fig. 11.5 Separation of angle changes into deformation and rigid-body rotation
11.1
Infinitesimal Strain Tensor
179
Fig. 11.6 Transformation law for the displacement gradient and infinitesimal strain tensors
As done in Fig. 11.4,
0
duðx Þ ¼ rudX0 ¼ ruðdX 0 Þe0x
Therefore,
0
@uðx Þ
dX 0
¼ rue0x and
8
0
@ux0
0 @uðx Þ
0
0
>
< Ex0 x0 ¼ @X 0 ¼ ex dX 0 ¼ ex ruex
@uy0
hy0 x0 ¼ @X 0 ¼ e0y rue0x
>
:
@u
hz0 x0 ¼ @Xz00 ¼ e0z rue0x
ð11:15Þ
In Fig. 11.6 so that
0
1
e0T
1
AðruÞð e01 ;
ðruÞ0 ¼ @ e0T
2
e0T
3
e02 ; e03 Þ ¼ ðRÞT ðruÞðRÞ
ð11:16Þ
complying with Eq. (9.10), and confirming that the displacement gradient matrix is
a tensor. Consequently,
ðEÞ0 ¼ ðRÞT ðEÞðRÞ
ðXÞ0 ¼ ðRÞT ðXÞðRÞ
ð11:17Þ
HW #11.1
Confirm Eq. (11.17) from Eq. (11.16).
11.2
Tensors for Finite Deformation
There are various tensors to measure finite deformation. These tensors are especially useful when formulating elasticity with finite deformation such as the
deformation of rubber. Note that these are not used to theoretically formulate
180
11
Kinematics and Strain
plasticity even with finite deformation but these do provide a basic foundation for
numerical formulation for plasticity with finite deformation.
Consider Eq. (11.1) along with Fig. 11.1 for the changes in position and shape
of a continuum body with time t. Then,
dx ¼
dx
dxi
dX ¼ FdXðor dxi ¼
dXj ¼ Fij dXj Þ
dX
dXj
ð11:18Þ
where F is known as the deformation gradient. The deformation gradient is
multiplicatively decomposable as
F ¼ RU ¼ VR
ð11:19Þ
where R is the orthogonal tensor, representing rigid body rotation, and U and V are
symmetric tensors, known as the right stretch tensor and the left stretch tensor,
respectively. In Fig. 11.1, F is assigned to a point P and, as shown in Eq. (11.18),
F provides dx as a vector P′Q′ in the current configuration for a given dX as a vector
for PQ in the initial configuration. By the deformation gradient, F, dX changes its
size and direction to become dx. In Eq. (11.19), R represents rigid body rotation;
therefore, the length change occurs by U and V. As for change in direction,
R contributes but U and V also contribute. As real symmetric tensors, U and V have
real principal values and (a set of orthogonal) principal vectors. Therefore, unless
dX corresponds to the principal vectors of U or V, there is a change in direction by
U and V. Obviously, rotation by R commonly applies to all dX but, since there is
no additional change in direction by U and V for their principal directions,
R presents the rotation of the principal directions of U to those of V. The change in
direction by deformation (here by U or V) is symmetric with respect to the principal
directions.
To multiplicatively decompose F, U and/or V are obtained first and then R is
obtained as R = FU−1 or R = V−1F or as the rotation of the principal directions of
U to those of V. As for U and V, consider dxu = UdX (while dx = Rdxu) and
dx = VdXR (while dXR = RdX). Since R does not change the length, jdxj ¼
jdxu j ¼ ds and jdXj ¼ jdX R j ¼ dS. Therefore,
ds
ds
nu ¼ UN;
n ¼ VN R
dS
dS
and
ds
n ¼ FN
dS
ð11:20Þ
where nu = dxu/ds, n = dx/ds and NR = dXR/dS, N = dX/dS. Consequently, when
there is a change in length between dx and dX by F, U and V provide the ratio of
the current and initial lengths. The principal values of U and V, which are the ratios
of the current and initial lengths of the principal vectors, are the same and always
positive, while, for their principal vectors, n*u = N*, n* = N*R and N*R = RN*.
11.2
Tensors for Finite Deformation
181
To obtain U and V from F, consider, from Eqs. (11.18) to (11.19)
ðdsÞ2 ¼ dx dxð¼dxT dxÞ ¼ dX FT FdXð¼dX T FT FdXÞ ¼ ðdSÞ2 N CN
ðdsÞ2 ¼ dx dxð¼dxT dxÞ ¼ dX R V T VdX R ¼ ðdSÞ2 N R BN R
ð11:21Þ
so that
ds
dS
2
¼ N CNð¼N T CNÞ ¼ N R BN R ð¼N TR BN R Þ
ð11:22Þ
where
C ¼ FT F ¼ ðRU ÞT RU ¼ U 2
and B ¼ FFT ¼ VRðVRÞT ¼ V 2
ð11:23Þ
in which C and B are symmetric tensors known as the right Cauchy-Green tensor
and the left Cauchy-Green tensor, respectively. According to Eq. (11.22), when
there is a change in length between dx and dX by F, C and B provide the square of
the ratio of the current and initial lengths.
Now, considering Eq. (9.27), which is the matrix relationship between tensor
components based on the principal directions and original coordinate system,
ðCÞ ¼ U 2 ¼ ðR ÞðU Þ ðR ÞT ðR ÞðU Þ ðR ÞT
0
1
0
1
k1 0 0
k1 0 0
B
C
B
C
¼ ðR Þ@ 0 k2 0 AðR ÞT ðR Þ@ 0 k2 0 AðR ÞT
0
0
0
k3
k1
0
0
B
¼ ðR Þ@ 0
0
k2
0
10
k1
CB
0 A@ 0
k3
0
0
k2
0
0 0 k3
1
0 2
0
k1
C
B
T
0 AðR Þ ¼ ðR Þ@ 0
k3
0
0
k22
0
1
0
C
T
0 Að R Þ
k23
ð11:24Þ
where the three column vectors of R* are three principal unit vectors of U and
ki¼1;2;3 are three principal values of U. Equation (11.24) confirms that the principal
vectors of C and U are the same and the principal values of C is the square of those
of U. Using a similar procedure, the principal vectors of B and V are the same and
the principal values of B are the square of those of V.
Equation (11.24) also shows that, when U is known, C is obtained by tensor
multiplication, as the square of U, or decomposing U as the principal values and
vectors and reassembling them after the principal values are squared.
Equation (11.24) also suggests that, when C is known, U is obtained as
0 pffiffiffiffiffi
1
k1
0
0
pffiffiffiffi
p
ffiffiffiffi
ffi
B
C
ðU Þ ¼
C ¼ ðR Þ@ 0
ðR ÞT
ð11:25Þ
0
k2
pffiffiffiffiffi A
0
0
k3
182
11
Kinematics and Strain
where the three column vectors of R* are three principal unit vectors of C and
ki¼1;2;3 are three principal values of C. Since the principal values of U are positive,
pffiffiffiffiffiffiffiffiffiffiffiffiffi
ki¼1;2;3 were ignored.
HW #11.2
Equation (11.25), which is developed here to obtain U from C, can be directly
pffiffiffiffi
derived from U ¼ C, not considering Eq. (11.24); i.e., consider,
pffiffiffiffi
1
1
13
C ðI Þ þ fðCÞ ðI Þg fð C Þ ð I Þ g2 þ
fð C Þ ð I Þ g3 2
24
246
emulating the Taylor series for a function of x,
pffiffiffi
1
1
13
ðx 1Þ2 þ
ðx 1Þ3 x ¼ 1 þ ðx 1Þ 2
24
246
Then,
0\x
pffiffiffiffi
1
1
13
fðCÞ ðI Þg2 þ
fðCÞ ðI Þg3 C ðI Þ þ f ðC Þ ðI Þg 2
2
4
2
4
6
8
1
1
0
0
k1 0 0
1 0 0
>
<
1
C
C
B
B
ðR Þ@ 0 k2 0 A
¼ ðR Þ@ 0 1 0 A ðR ÞT þ
2>
:
0 0 k3
0 0 1
8
9
1
1
0
0
k1 0 0
1 0 0
>
>
<
=
1
C
C
B
B
ðR ÞT ðR Þ@ 0 1 0 AðR ÞT
ðR Þ@ 0 k2 0 A
>
2 4>
:
;
0 0 k3
0 0 1
92
1
1
0
0
1 0 0
1 0 0
>
=
C
C
B
B
ðR ÞT ðR Þ@ 0 1 0 AðR ÞT
þ ¼ ðR Þ@ 0 1 0 A
>
;
0 0 1
0 0 1
8
9
1
0
k
1
0
0
>
>
1
<
=
1
C
B
k2 1
0 AðR ÞT
ðR ÞT þ
ðR Þ@ 0
>
2>
:
;
0
0
k3 1
8
9
1
0
ðk1 1Þ2
0
0
>
>
<
=
1
C
B
T
2
R
þ ðR Þ@
ð
Þ
A
0
0
ðk2 1Þ
>
2 4>
:
;
2
0
0
ðk3 1Þ
0
1
1 þ 12 ðk1 1Þ 24
ðk1 1Þ2 þ B
¼ ðR Þ@ 0
0
1
1 þ 12 ðk2 1Þ 24
ðk2 1Þ2 þ 0
0
0
0
0
1
C
T
0 AðR Þ
pffiffiffiffiffi
k3
Confirm this whole procedure.
1
C
T
AðR Þ
0
2
0 pffiffiffiffiffi
0
k1
pffiffiffiffiffi
B
¼ ðR Þ@ 0
k2
2
1
ðk3 1Þ þ 0 1 þ 12 ðk3 1Þ 24
11.2
Tensors for Finite Deformation
183
HW #11.3
To multiplicatively decompose F, U and/or V are obtained first and then R is
obtained as R = FU−1 or R = V−1F or as the rotation of the principal directions of
U to those of V. Derive the following for the second approach:
ðRÞ ¼ ðRÞV ðRÞUT
ð11:26Þ
where the three column vectors of ðRÞV and ðRÞU are three principal unit vectors of
V and U, respectively. Note that Eq. (11.26) implies that eVi¼1;2;3 ¼ ReUi¼1;2;3
where eVi¼1;2;3 and eUi¼1;2;3 are unit principal vectors of V and U, respectively.
In order to evaluate the change in length, considering Eq. (11.21),
ðdsÞ2 ðdSÞ2
ðdSÞ2
~
¼ N ðC IÞN 2N EN
ð11:27Þ
~ is the finite strain tensor (or Green strain tensor). Equations (11.1) and
where E
(11.27) lead to
T
~ ¼ ðC IÞ ¼ ðF F IÞ ¼ 1 ðI þ ruÞT ðI þ ruÞ I
E
2
2
2
1
ðruÞ þ ðruÞT þ ðruÞT ðruÞ
¼
2
ð11:28Þ
Note that the finite strain tensor converges towards the infinitesimal strain tensor
defined in Eq. (11.10) when deformation is so small that ðruÞT ðruÞ in Eq. (11.28)
virtually vanishes.
HW #11.4
Consider dX1 and dX2 for Point P in Fig. 11.1, which deform to dx1 and dx2,
respectively, then
_
dx1 dx2 ¼ dX1 CdX2 ¼ dX 1 ð2E þ IÞdX2
which becomes Eq. (11.27), when dX1 = dX2 (so that dx1 = dx2). For infinitesimal
deformation, Eq. (11.27) leads to the following normal (diagonal) component of the
infinitesimal tensor, complying with Eq. (11.15).
ðdsÞ2 ðdSÞ2
ðdsÞ ðdSÞ
ðdSÞ
ð11:29Þ
2ðdSÞ
Confirm this (with N = e0x ). As for the change in angle, consider dX1 and dX2,
which are vertical to each other, then, for infinitesimal deformation,
ENN ¼ N EN ¼ N ðruÞN ¼
2
p
dx1 dx2 ðdSÞ2 cosð cÞ ¼ ðdSÞ2 N 1 ð2EÞN 2
2
184
11
Kinematics and Strain
where c ¼ hN 1 N 2 þ hN 2 N 1 , which leads to the following shear component of the
infinitesimal strain tensor,
ðhN 1 N 2 þ hN 2 N 1 Þ
¼ N 1 EN 2 ¼ N 2 EN 1
2
ru þ ðruÞT 2
ÞN
¼ N1 ð
2
EN 1 N 2 ¼ EN 2 N 1 ¼
ð11:30Þ
which complies with Eq. (11.15). Confirm this (with N1 = e0x and with N2 = e0y ).
11.3
Rate of Deformation Tensor and True Strain Tensor
The rate of deformation at an instantaneous moment of the current time t is evaluated considering the velocity distribution in the current configuration: v = v(x, t).
Then, the relative velocity of a neighboring point Q′ with respect to the velocity of a
position, P′, in Fig. 8.1 becomes
dv ¼
@v
dvi
dx ¼ ðrvÞdx Ldx ðor dvi ¼
dxj ¼ Lij dxj Þ
@x
dxj
ð11:31Þ
Here, L (=rv), known as the spatial gradient of velocity, is obtained by applying
Eq. (10.3) for each component, f = vi, while r = x, in the rectangular Cartesian
coordinate system. The geometric meaning of the component of L becomes, as
illustrated in Fig. 11.7,
0
vx;x
L ¼ @ vy;x
vz;x
vx;y
vy;y
vz;y
0
1
dðdxÞ
dvx
1
¼ dxdt ¼ dðdxÞ
vx;z
dt dx
B dx
vy;z A ¼ B
h_ yx
@
vz;z
h_
zx
dvy
dy
h_ xy
1
¼ dðdyÞ
dt dy
h_ zy
1
h_ xz
h_ yz
dvz
dz
1
¼ dðdzÞ
dt dz
C
C
A
ð11:32Þ
in which normal components represent the normalized length change rate, while
shear components represent angle change rate.
Such a geometric meaning of the components of L can be justified by comparing
it with the displacement gradient, ruðXÞ, (with respect to X), which is used to
define the infinitesimal stain; i.e.,
du
Þ d du
dðruÞ dðdX
dv
¼ dt ¼
¼
dt
dt
dX
dX
ð11:33Þ
dv
while Lð¼ rvÞ ¼ dx
; therefore, they do differ from each other with their primary
difference being that ru is for the initial configuration and L is for the current
configuration. As such, when deformation is infinitesimal and x X, they are
11.3
Rate of Deformation Tensor and True Strain Tensor
.
185
.
.
.
.
.
Fig. 11.7 The rate of change for three lines and six angles for a volume element, dV, in the
current configuration
virtually the same. Note that the geometric meanings of the components of ru are
approximations, which are valid only for infinitesimal deformation, while those of
L are exact and valid for finite deformation.
As in the case for relative displacement, du ¼ ðruÞdX, two factors contribute to
the difference in relative velocity: (local) rigid body rotation and deformation; i.e.,
dv ¼ dvD þ dvW
where
ð11:34Þ
8
< dvD ¼ Ddx ¼
L þ LT
2
dx
: dvW ¼ Wdx ¼
LL
2
dx
T
ð11:35Þ
in which D, known as the rate of deformation tensor, accounts for the contribution by deformation, and is symmetric. Meanwhile, W, known as the spin
tensor, accounts for the contribution by rigid body rotation and is anti-symmetric.
The contribution by W for rigid body rotation is validated by comparing dvW
with that which was derived from Chasles’ theorem for rigid body motion shown in
Eq. (1.17). This then leads to
dvð¼vi vR ¼ w ~rRi Þ ¼ w dx
ð11:36Þ
186
11
Kinematics and Strain
where w is the angular velocity vector, w = wxex + wyey + wzez (=wiei). Equating
dvW with dv leads to
0
0
B
W ¼ @ W12
1 0
0
W12 ð¼Wxy Þ W13 ð¼Wxz Þ
C B
0
W23 ð¼Wyz Þ A ¼ @ w3
w3 ð¼wz Þ
0
W23
0
w2
1
0
ðvx;y vy;x Þ ðvx;z vz;x Þ
1B
C
0
ðvy;z vz;y Þ A
¼ @ ðvx;y vy;x Þ
2
ðvx;z vz;x Þ ðvy;z vz;y Þ
0
0
1
0
ðh_ xy h_ yx Þ ðh_ xz h_ zx Þ
1B
C
¼ @ ðh_ xy h_ yx Þ
0
ðh_ yz h_ zy Þ A
2
0
ðh_ xz h_ zx Þ ðh_ yz h_ zy Þ
W13
0
w1
1
w2 ð¼wy Þ
C
w1 ð¼ wx Þ A
0
ð11:37Þ
HW #11.5
Confirm Eq. (11.37). Also, confirm that w ¼ 12 curlðvÞ. The relationship between
the angular velocity w and the (anti-symmetric) spin tensor W is generally valid for
any anisotropic tensor, for which the angular velocity is known as the axial (or
dual) vector of the anti-symmetric tensor: w a ¼ Wa for any vector a. As
confirmed here, the component of the axial vector of an anti-symmetric tensor,
denoted here as w and W for convenience, respectively, becomes
w ¼ wx ex þ wy ey þ wz ez ¼ Wzy ex þ Wxz ey þ Wyx ez ¼ ðWyz ex þ Wzx ey þ Wxy ez Þ
ð11:38Þ
Also, note that the angular velocity w is a vector, while x ¼ xx ex þ xy ey þ xz ez for
the change in angle shown in Eq. (11.12) is approximately a vector, which is valid
only when the angle change is infinitesimal.
EX #11.2
The rate of angle change on the x-y plane are decomposed into the rate of shear,
Dxy = Dyx = 0.002 by deformation and rigid body rotation by w = −0.001ez in
Fig. 11.8.
HW #11.6
As for the rate of length change, consider dx for Point P′ in Fig. 11.1, then
d
d½ðdsÞ2
dðdsÞ
ðdx dxÞ ¼
¼ 2ðdsÞ
¼ 2dx dv ¼ 2dx Ldx ¼ 2ðdsÞ2 ðn LnÞ
dt
dt
dt
Therefore,
1 dðdsÞ
¼ n Ln ¼ n Dn ¼ Dnn
ds dt
ð11:39Þ
11.3
Rate of Deformation Tensor and True Strain Tensor
187
Fig. 11.8 Separation of angle change rates into contributions by deformation and rigid-body
rotation
As for the rate of angle change, consider dx1 and dx2 for a point P′ in Fig. 11.1,
which are vertical to each other, then,
o
d
dn
ðdx1 dx2 Þ ¼
ðdsÞ2 cosð#Þj#¼p ¼ ðdsÞ2 #_ ¼ ðdsÞ2 c_
2
dt
dt
¼ dv1 dx2 þ dx1 dv2 ¼ dx2 ðLdx1 Þ þ dx1 ðLdx2 Þ ¼ 2ðdsÞ2 ðn1 Dn2 Þ
Therefore,
c_ ðh_ n1 n2 þ h_ n2 n1 Þ
¼ n1 Dn2 ¼ n2 Dn1 ¼ Dn1 n2 ¼ Dn2 n1
¼
2
2
ð11:40Þ
_ is its decreasing rate,
where # is the angle between dx1 and dx2 and c_ ð¼ #Þ
related to the shear rate of D. Confirm the whole mathematical processes here.
Manipulating n1 and n2 with the base unit vectors of the new coordinate system in
the rectangular Cartesian coordinate system, as done in Eq. (11.15), would lead to
the same transformation law for the second order tensor discussed in Eq. (9.10).
HW #11.7: The work rate per unit volume
The work rate per unit volume was derived in Eq. (10.19) as an exercise to apply
the divergence theorem. Now, directly derive the result by carrying out the
derivation of the work rate for the volume element in the current configuration
shown in Fig. 8.3, without applying the divergence theorem. Follow the procedure
applied to derive the equations of motions shown in Eqs. (8.5) and (8.6), involving
the body force, equilibrium equations and Taylor series.
HW #11.8: The rate of volume change per unit volume
For the differential volume in the current configuration, dV = (dx)(dy)(dz) so that d
(dV) = d(dx)(dy)(dz) + (dx)d(dy)(dz) + (dx)(dy)d(dz). Dividing with dV leads to
1 dðdVÞ
1 dðdxÞ
1 dðdyÞ
1 dðdzÞ
¼
þ
þ
ðdVÞ dt
ðdxÞ dt
ðdyÞ dt
ðdzÞ dt
188
11
Kinematics and Strain
Complete the derivation that
1 dðdVÞ
¼ Dii ¼ tr ðDÞ
ðdVÞ dt
ð11:41Þ
which is the first invariant of D.
Remark #11.2 Lagrangian and Eulerian
Any physical measure, description or formulation, which is based on the initial
(or reference) configuration, is classified to be Lagrangian, while those based on
the current configuration is classified to be Eulerian. Note that almost all the
tensors introduced in this chapter are Lagrangian, which are defined for a (material)
element, P, in Fig. 11.1. However, this does not include the Cauchy stress, velocity
gradient, rate of deformation and spin tensors, which are defined for a (spatial)
element, P′, in Fig. 11.1, as being Eulerian.
HW #11.9
Linear elasticity law is improper
The constitutive law for linear elasticity shown in Eq. (1.30) is improper in a
strict sense, since it equates an Eulerian quantity, the Cauchy stress, and with a
Lagrangian quantity, the infinitesimal strain. In order to demonstrate its absurd
performance, compare the following three cases of simple tension of a straight bar
shown in Fig. 11.9. For convenience in calculation, consider the (finite) strain on
behalf of the (infinitesimal) strain, since both are virtually the same for infinitesimal
deformation and assume isotropy with Young’s modulus E and Poisson’ ratio, m.
In Fig. 11.9a and b, the bar is stretched in the X and Y directions, respectively,
while, in Fig. 11.9c, the bar is stretched in the X-direction and then rotated 90°.
Then,
0
1
1 þ 103
0
0
B
C
FðaÞ ¼ U ðaÞ ¼ @
0
1 m 103
0
A;
0
0
FðbÞ ¼ U ðbÞ
1 m 103
B
¼@
0
0
FðcÞ ¼ RU ðaÞ
0
B
¼ @1
1 m 103
0
0
1
0
0
0
1 þ 103
0
0
0
1 m 103
10
0
1 þ 103
CB
0 A@
0
0
1
1
C
A
0
1 m 103
0
0
0
1 m 103
0
and the Cauchy stress is expected to be
0
rðaÞ
T
¼@0
0
0
0
0
1
0
0 A;
0
0
rðbÞ ¼ rðcÞ
0
¼ @0
0
0
T
0
1
0
0A
0
1
C
A
11.3
Rate of Deformation Tensor and True Strain Tensor
(a)
(b)
189
(c)
Fig. 11.9 Three cases of a bar under simple tension
where T = E 10−3. Now, calculate the strain and apply the linear elasticity law to
calculate the stress. Then compare this with the expected values for each case. The
exercise will confirm that the linear elasticity law does not properly provide the
stress for Case (c): E(a) = E(c) while rðbÞ ¼ rðcÞ . Therefore, the law in Eq. (1.30)
should be applied for infinitesimal deformation, which implies not only infinitesimal length and angle changes but also infinitesimal rotation such that X ’ x.
Remark #11.3 Eulerian tensors on a rotating body (or a rotating current
configuration)
In HW #11.9, for tensors of a material element which rotates, rðbÞ ¼ rðcÞ (as
visually confirmed) while E(a) = E(c) (as confirmed by calculation). Such a difference arises since the stress r is Eulerian and the strain E is Lagragian. If both were
Eulerian or Lagrangian, such a discrepancy would not arise. If both were
Lagrangian, the effect of a rotating body would not occur, since the rotating body is
the current configuration x, not the original configuration X, on which the
Lagrangian tensors are based. For Eulerian tensors, if its body rotates, Eulerian
tensors rotate. To develop the formulation for the rotation of the Eulerian tensor,
consider an Eulerian tensor T on a rotating body as shown in Fig. 11.10. As a
tensor, b Tað¼ bT TaÞ ¼ c [examples of such manipulation are Eqs. (8.16),
(11.39) and (11.40)], before rigid body rotation in Fig. 11.10a, where T, a and b are
a tensor and two vectors all defined in the current configuration; therefore, they are
supposed to be updated when there is rotation in the current configuration. Then,
~b T~
~að¼~bT T~
~aÞ ¼ b Tað¼bT TaÞ ¼ c
~ a~ and ~b are values after rotation as shown in
with a constant c, where T,
Fig. 11.11b, while ~a ¼ Ra and ~b ¼ Rb with the orthogonal tensor R for rotation.
Consequently,
~ ¼ RTRT
T
ð11:42Þ
~
T ¼ RT TR
The relationship in Eq. (11.42) is opposite with that in Eq. (9.13) since, in
Eq. (11.42), the material rotates by R (with a fixed coordinate system), while, in
190
11
(a)
Kinematics and Strain
(b)
T
T
T
T
Fig. 11.10 Schematic view of an Eulerian tensor on a rotating body: a before and b after rotation
(b)
5.0
(a)
Effective strain
4.0
y
1.0
d
Proportional true strain path
Simple shear
3.0
2.0
1.0
0
1.0
x
0.0
0.0
1.0
2.0
dd
3.0
4.0
5.0
Fig. 11.11 a Simple shear flow and b comparison of the amount of deformation in terms of the
effective strain between the proportional true strain deformation path and simple shear
Eq. (9.13), the coordinate system rotates by R: For a materially embedded coordinate system (therefore, rotating with the material), o ei ð¼Rei Þ, the tensor based on
o
ei becomes T 0 and the tensor based on ei becomes T in Eq. (9.13). Meanwhile, the
~ and the tensor based on o ei becomes T in Eq. (11.42).
tensor based on ei becomes T
Also, note that the relationship in Eq. (9.13) is valid for any tensor, while that in
Eq. (11.42) is valid for the Eulerian tensor, for which its current configuration
rotates with R. For the Lagrangian tensor, b Tað¼bT TaÞ ¼ c [examples are
Eqs. (11.27), (11.29) and (11.30)], where T, a and b are all defined in the initial
configuration; therefore, they are not updated for rotation so that ~
a ¼ a, ~
b ¼ b and
~ ¼ T (as confirmed for E in HW #11.9). As for the deformation gradient, F
~ ¼ RF
T
by the chain rule, which is an intermediate between Lagrangian and Eulerian.
11.3
Rate of Deformation Tensor and True Strain Tensor
191
Finally, discussions here confirm that Eq. (1.32) for a linear viscous fluid is proper,
since it equates between Eulerian tensors.
Remark #11.4 True strain tensor for finite deformation
The rate of deformation tensor, D, is intensively utilized in fluid mechanics and
plasticity. However, the way to apply it in each field is quite different. In fluid
mechanics, as exemplified by Eq. (1.32) for a linear viscous fluid, the stress is not
dependent on the deformation history (of a material element) so that the spatial
distribution of D determines the spatial distribution of the stress: the Eulerian formulation. In plasticity, as one of solid mechanics, the stress is determined for a
material element (as in elasticity) and it is dependent on the history of deformation.
Therefore, D is traced following a material element (initial for P, then for P′ and then
for a new material position at the next moment in Fig. 11.1, considering Eq. (11.1)
for the motion of material elements). To account for deformation history, a scalar
value called the effective (or equivalent) plastic strain rate is defined for D of
plastic deformation to evaluate its size such as its magnitude (or modified magnitude
to account for the directional bias for anisotropic materials). It is then integrated to be
connected to material property change throughout plastic deformation. Details will
be discussed in Part III.
As for the integration of the rate of deformation tensor itself, comparing
Eqs. (2.1) and (11.39) confirms that D is the three-dimensional version of the true
strain rate; therefore, the natural strain increment is defined as
de Ddt
ð11:43Þ
R
R
and e ¼ de ¼ Ddt, which might be the true strain (or natural strain) as a
three-dimensional version of Eq. (2.2) (note that de here and de in Eq. (10.20) are
not related to each other). However, even though this integration is performed
following a material element, it still has an Eulerian nature so that the resulting e is
not the true strain and is not so useful. In fact, it is so important to note that
Eqs. (2.1) and (2.2) share the same principal material lines (meaning that their
principal directions correspond to the same material lines, which are aligned in the
tensile direction and its normal directions). Therefore, the true strain tensor should
be Lagrangian in nature and, furthermore, its principal directions are supposed to be
materially fixed.
Now, from Eqs. (11.18) and (11.31),
dðdxÞ
_
ð¼dvÞ ¼ FdX
¼ Ldx ¼ LðFdXÞ
dt
so that
1 T
_ 1 ¼ ðRU
_ þ RUÞðU
_
_ T þ RðUU
_ 1 ÞRT
L ¼ FF
R Þ ¼ RR
192
11
Kinematics and Strain
_ T is anti-symmetric but RðUU
_ 1 ÞRT is not symmetric nor anti-symmetric
where RR
in general. Therefore,
(
_ 1 ÞS RT
D ¼ RðUU
ð11:44Þ
_ T þ RðUU
_ 1 ÞA RT
W ¼ RR
1
1
_
_
where ðUU
ÞS and ðUU
ÞA are the symmetric and anti-symmetric parts of
1
_
ðUU
Þ, respectively. However, if the principal direction of U is fixed (meaning
that it is materially fixed since U is Lagrangian) for 0
symmetric such that
DðtÞ ¼ RðtÞ_et ðtÞRT ðtÞ
T
_
WðtÞ ¼ RðtÞR
ðtÞ
where
0
t
_ 1 Þ comes
tf , then ðUU
ð11:45Þ
1
e1 T
CB
C
_ 1 Þ ¼ ð e1 ; e2 ; e3 ÞB
e_ t ðtÞ ¼ ðUU
@0
0 A@ e2 T A
T
e3
0 0 k_ 3
0 1
10 T 1
e1
0
0
k1
B
CB T C
1
ð e1 ; e2 ; e3 Þ @ 0 k 2
0 A@ e2 A
T
e3
0
0 k1
0_
1 3
k1
0 0 0 e T 1
1
B k1
C
_
B
CB
C
¼ ð e1 ; e2 ; e3 ÞB 0 kk2 0 C@ e2T A
2
@
A
T
_
e3
0 0 k3
k_ 1
0
k_ 2
0
10 ð11:46Þ
k3
Comparing Eqs. (11.42) and (11.45) confirms that D is the deformation rate tensor
on the material element rotating with R, while e_ t is that of the initial configuration
or that which is based on the materially embedded coordinate system, ei ð¼ Rei Þ.
Therefore, e_ t is Lagrangian in nature with the materially fixed principal vectors, ei
_
(based on the materially embedded coordinate system), which is shared by U and U.
_
Here, ki and ki are the principal values of U_ and U, respectively, and the principal
values of e_ t are the true strain rates, comparable with Eq. (2.1), so that e_ t is the true
strain rate. Now, when tf is the final moment of deformation, the true strain tensor
becomes,
0
10 T 1
Z
0
0
ln k1 ðtf Þ
e1
A@ e T A
0
ln k2 ðtf Þ
0
et ðtf Þ ¼ e_ t ðtÞdt ¼ ð e1 ; e2 ; e3 Þ@
2
T
0
0
ln k3 ðtf Þ
e3
ð11:47Þ
11.3
Rate of Deformation Tensor and True Strain Tensor
193
whose principal values are true strains comparable with those shown in Eq. (2.2).
HW #11.10
_ T is anti-symmetric, considering that RRT = I. As for UU
_ 1 , confirm
Prove that RR
that the multiplication of two symmetric tensors is generally not symmetric.
HW #11.11
The true strain derived in Eq. (11.47) can be expressed as
1
et ðtf Þ ¼ lnðUðtf ÞÞ ¼ lnðCðtf ÞÞ
2
ð11:48Þ
Confirm these as done in HW #11.2, considering the Taylor series for a function
of x,
lnðxÞ ¼ ðx 1Þ þ
1
1
ðx 1Þ2 þ ðx 1Þ3 2
3
0\x
2
The true strain in Eq. (11.47) is derived under the one condition that U has
materially fixed principal directions. Now, it is further assumed that the components
of the true strain are proportional during 0 t tf : deformation with proportional
true strain. Then,
et ðtÞ ¼
Ztf
0
e_ t ðtÞdt ¼ ð e1 ;
e2 ;
0
ln k1 ðtÞ
e3 Þ @ 0
0
¼ et ðtf ÞaðtÞ
10 T 1
0
0
e1
ln k2 ðtÞ
0 A@ e2 T A
T
0
ln k3 ðtÞ
e3
ð11:49Þ
where aðtÞ is an ever increasing function of time and aðt ¼ 0Þ ¼ 0 aðtÞ aðtf Þ ¼ 1:0
_
so that the components of e_ t are also proportional as et ðtf ÞaðtÞ.
When the deformation amount is measured as the integration of the effective (or equivalent) strain
rate, which is the magnitude of D, deformation with the proportional true strain
provides the minimum deformation amount; i.e.,
Ztf
Ztf
jDjdt ¼
0
0
pffiffiffiffiffiffiffiffiffiffiffiffi
Dij Dij dt ¼
Ztf
e_ t dt
0
Ztf
Ztf qffiffiffiffiffiffiffiffi
qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
t
t
t
_
¼
e_ ij e_ ij dt ¼ e ðtf Þ
aðtÞdt
¼ et ðtf Þ ¼ eijt ðtf Þeijt ðtf Þ
0
ð11:50Þ
0
qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
¼ ðln k1 ðtf ÞÞ2 þ ðln k2 ðtf ÞÞ2 þ ðln k3 ðtf ÞÞ2
considering Eq. (11.45). This minimum amount is similar with the distance
between the origin and a point at x, which is the minimum length of travel between
194
11
the two points when the travel path is proportional; i.e.,
Rtf
Kinematics and Strain
jdxj ¼ jxj. The minimum
0
amount of deformation derived in Eq. (11.50) is applicable for more a general
definition of the effective strain rate. When the deformation path with the proportional true strain tensor is applied for plastic deformation, it consumes the minimum
plastic energy even for anisotropic materials, as will be further discussed in Part III.
HW #11.12: Simple shear (flow)
When an initial square is deformed in the simple shear flow as shown in
Fig. 11.11a, material points travel straight from their initial positions to their final
positions, with the following displacement vector:
dY
uðXÞ ¼ aðtÞ
0
Therefore,
0 d
_
L ¼ aðtÞ
;
0 0
dy
¼ aðtÞ
0
1 d
F ¼ aðtÞ
0 1
ð11:51Þ
ð11:52Þ
Derive D and its principal values and principal directions. Note that the principal
directions of D is fixed spatially so that the principal directions are not materially
fixed for the simple shear flow. When D is proportional as is the case here,
Rt
Rt
_ f Þ so that
eðtf Þ ¼ 0f de ¼ 0f Ddt with D ¼ aeðt
Ztf
Ztf
jDjdt ¼
0
¼
pffiffiffiffiffiffiffiffiffiffiffiffi
Dij Dij dt ¼
0 ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
q
Ztf
Ztf
je_ jdt ¼
0
pffiffiffiffiffiffiffiffi
e_ ij e_ ij dt ¼ jeðtf Þj
0
Ztf
_
aðtÞdt
¼ jeðtf Þj
0
eij ðtf Þeij ðtf Þ
ð11:53Þ
Rt
leading to 0f jDjdt ¼ pdffiffi2. Derivations of Eqs. (11.50) and (11.53) are similar but
their physical implications are different such that
jet ðtf Þj ¼
qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
etij ðtf Þetij ðtf Þ
jeðtf Þj ¼
qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
eij ðtf Þeij ðtf Þ
Considering F in Eq. (11.52), derived the true strain between the initial and final
configurations shown in Fig. 11.11a and its effective strain as
Ztf
pffiffiffiffiffiffiffiffiffiffiffiffiffi!
qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi pffiffiffi
d þ d2 þ 4
t
t
jDjdt ¼ je ðtf Þj ¼ eij ðtf Þeij ðtf Þ ¼ 2 ln
2
t
0
ð11:54Þ
11.3
Rate of Deformation Tensor and True Strain Tensor
195
The two effective strains with respect to ‘d’ as et ðtf Þ and jeðtf Þj are compared in
Fig. 11.11b to demonstrate that the effective strain of the proportional true strain
deformation path is smaller than that of simple shear. Derive also that the materially
pffiffiffiffiffiffiffiffiffi
ffi
2
fixed principal directions of the true strain vary according to B as arctanðd d þ 4Þ.
2
In order to better understand Eqs. (11.44) and (11.45), consider the following
deformation in two discrete steps:
~
~
~ UÞ
~ ¼ RU
F ¼ ðDR2 DU 2 ÞðDR1 DU 1 Þ ¼ ðDR2 DR1 D U2 D U1 Þ ¼ ðDR2 DR1 ÞðDRD
ð11:55Þ
Here, DU 2 ¼ DR1 D U 2 DRT1 and DU 1 ¼ D U 1 , considering Eq. (11.42), when
D U 1 and D U 2 are tensors based on the materially embedded coordinate system.
~~ since D U D U is not symmetric nor
~~ UÞ
Meanwhile, D U2 D U1 ¼ DRðD
2
1
anti-symmetric when the principal vectors of D U 1 and D U 2 are not equal.
Therefore,
(
~~
R ¼ DR2 DR1 DR
~
~
U ¼ DU
ð11:56Þ
~
~ which is the contribution
in which R involves not only DR1 and DR2 but also DR,
from the non-symmetry of D U 2 D U 1 . A similar occurence can be observed for
_ 1 .
W in Eq. (11.44), which involves contributions by the non-symmetry of UU
These added contributions vanish when the principal directions of stretch tensors
are materially fixed both in Eqs. (11.45) and (11.56), which becomes
R ¼ DR2 DR1
U ¼ DU 2 DU 1
ð11:57Þ
As mentioned, D is intensively applied to analytically formulate deformationhistory dependent plasticity, while et is intensively utilized to numerically formulate
the plastic deformation increment in the discrete time step as will be detailed in
Part III.
Remark #11.5 Readers are now encouraged to read Sect. 1.3 again before start
reading Part III.
References
Khan, A. S., & Huang, S. (1995). Continuum theory of plasticity. Hoboken: Wiley.
Lai, W. M., Rubin, D. H., Krempl, E., & Rubin, D. (2009). Introduction to continuum mechanics.
Oxford: Butterworth-Heinemann.
Part III
Three-dimensional Plasticity
The main features of plasticity were covered in Part I, utilizing one-dimensional
constitutive laws of plasticity for simplicity. In this part, those one-dimensional
laws are extended to general three-dimensional laws based on materials covered in
Part II. Three-dimensional constitutive law of plasticity to be covered here consists
of three aspects: yield function, normality rule, and hardening law.
Chapter 12
Yield Function
In the simple tension test, materials deform elastically until stress reaches the yield
point, after which plastic deformation starts as schematically shown in Fig. 2.2.
Since there are nine stress components (or six components, if its symmetry is
considered), combined loading of some or all of those components forms a yield
surface, which defines a boundary of elasticity. The yield surface would be
nine-dimensional (or six-dimensional) if all nine components are combined or only
two or three-dimensional, if two or three components are combined. Experimentally
measuring the yield surface is desirable but it is a difficult task, especially if more
than two components are combined. However, there are several theoretical yield
surfaces available (some of which have partially proven their validity experimentally), which are discussed here.
12.1
Basic Features of the Yield Surface
To discuss several basic features of the yield surface with simplicity, first consider a
two-dimensional imaginary yield surface here, which is a line; i.e.,
f ðrÞ ¼ f ðrxx ; ryy Þ ¼ constant
ð12:1Þ
(1) In Eq. (12.1), f ðrÞ is the yield function, which describes the yield surface when
it is equated with a constant. The constant defines the size of the yield surface.
(2) The yield surface is considered to be convex (bulged out, or more technically,
any straight line connecting two points located inside the surface stays inside
the surface) as schematically illustrated in Fig. 12.1. This assumption is supported in various ways including theoretical postulates, experiments and crystal
plasticity so that it is universally accepted.
© Springer Nature Singapore Pte Ltd. 2018
K. Chung and M.-G. Lee, Basics of Continuum Plasticity,
https://doi.org/10.1007/978-981-10-8306-8_12
199
200
12 Yield Function
(b)
(a)
Fig. 12.1 Schematical view of the yield surface, a which is convex and b which is not
(3) Since the constitutive law describes material properties, components of vector
or tensor quantities that describe the constitutive law, or the yield surface here,
are defined with respect to the coordinate system embedded in the material, also
referred to as the materially embedded coordinate system. Note that the
components of vectors and tensors associated with Newton’s law, (covered
mostly in Parts I and II), are defined with respect to the coordinate system
embedded in the laboratory. The orientations of the materially embedded
coordinate system vary for all material elements, while those of the laboratory
coordinate system are the same for all material elements. Such differences in
orientation should be properly traced to connect material properties and
Newton’s law, which will be further detailed in Chap. 16.
(4) The yield surface expands, translates and changes its shape during plastic
deformation. Its expansion and translation were extensively researched as will
be discussed in Chap. 15, while its shape change has not yet been well studied.
In this text, the position and shape of the yield surface is assumed to be fixed so
that it only expands in most of the discussions here, unless specified otherwise.
The way to quantify the amount of plastic deformation will be discussed in
Chap. 13.
(5) For the isotropic case, assume that the yield function is the size of the stress,
then the yield surface becomes a circle as
(
f1 ðrÞ ¼ jrj ¼ ðr2xx þ r2yy Þ1=2 ¼ c
f2 ðrÞ ¼ jrj2 ¼ ðr2xx þ r2yy Þ ¼ c2
ð12:2Þ
where ‘c’ is a constant. Now, notice that there are many expressions of the yield
function (f1 and f2 here) to describe the same yield surface.
12.1
Basic Features of the Yield Surface
201
Remark #12.1 The n-th order homogeneous function
For a scalar function f(x) of a vector or a tensor, x, when
f ða xÞ ¼ an f ðxÞ
ð12:3Þ
with a constant a, the scalar function is the n-th order homogeneous function. Then,
it has the following two properties:
@f
becomes theðn 1Þ-th order homogeneous(vector or tensor) function
@x
ð12:4Þ
ðIÞ
@f
@f
@f
xð¼
xi or
xij Þ ¼ nf ðxÞ
@x
@xi
@xij
ðIIÞ
ð12:5Þ
An example of the n-th order homogeneous scalar function is
x
f ¼ x þy ; x ¼
y
n
n
For (I),
g¼
@f
¼
@x
nxn1
nyn1
and
gðaxÞ¼
nðaxÞn1
nðayÞn1
¼ an1
nxn1
nyn1
For (II),
@f
x ¼ nxn þ nyn ¼ nf
@x
To prove them,
For (I), consider
f ðaxÞ ¼ an f ðxÞ; gðxÞ ¼
@f ðxÞ
@x
Then, for the left side of the first,
@f ðaxÞ @f ðaxÞ @ðaxÞ
@f ðaxÞ
¼
¼ aI
¼ agðaxÞ
@x
@ðaxÞ @x
@ðaxÞ
¼ an1 g
202
12 Yield Function
while, for the right side of the first,
an
@f ðxÞ
¼ an gðxÞ
@x
Therefore,
gðaxÞ ¼ an1 gðxÞ
For (II),
The left side of the first becomes,
@f ðaxÞ @f ðaxÞ @ðaxÞ @f ðaxÞ
@f ðxÞ
¼
¼
x ¼ gðaxÞ x ¼ an1
x
@a
@ðaxÞ
@a
@ðaxÞ
@x
while, for the right side of the first,
@ðan f ðxÞÞ
¼ nan1 f ðxÞ
@a
Therefore,
@f ðxÞ
x ¼ nf ðxÞ
@x
In Eq. (12.2), f1 is a first order homogeneous (yield) function, while f2 is a
second order homogeneous (yield) function. The yield function of the first order
homogeneous function is also called the effective (yield) stress or the equivalent
. Also, note that constants in Eq. (12.2),
(yield) stress, commonly denoted as r
which define the size of the yield surface, increase as a function of the amount of
plastic deformation, if the yield surface expands, without shape change or translation. It may not be incorrect to assume that the yield function is the size of the
stress for the isotropic case. However, the yield surface described in Eq. (12.2) is
not appropriate for the plasticity of metals even for the isotropic case only because
there is one key feature missing, which will be discussed later in this chapter.
(6) If a circle can be good as a yield surface of the isotropic case, an ellipse would
be valid as an anisotropic yield surface, which is
8
1
ar
>
1 ðrÞ ¼ ðr2xx þ ð byy Þ2 Þ2 ¼ a
>
> f1 ðrÞ ¼ r
>
1
<
2 ðrÞ ¼ ððbraxx Þ2 þ r2yy Þ2 ¼ b
f2 ðrÞ ¼ r
> f3 ðrÞ ¼ ðr2 þ ðaryy Þ2 Þ ¼ a2
>
xx
b
>
>
: f ðrÞ ¼ ððbrxx Þ2 þ r2 Þ ¼ b2
4
yy
a
ð12:6Þ
12.1
Basic Features of the Yield Surface
203
where ‘a’ and ‘b’ are constants. Notice also that the yield function is not unique
for the same ellipse. Even the effective stress is not unique. As for the two
effective stresses, they differ with constants, which define the size of the ellipse.
1 is the yield stress of simple tension in the x direction,
The constant ‘a’ for r
2 is the yield stress of simple
r ¼ (rxx ¼ a,ryy ¼ 0), while the constant ‘b’ for r
tension in the y direction; i.e., r ¼ ðrxx ¼ 0; ryy ¼ bÞ. Such a stress state whose
yield stress describes the size of the yield surface is the reference stress state of
the effective stress and when the reference state is prescribed, the effective stress
expression becomes unique.
(7) If a circle is a proper isotropic yield surface and an ellipse is a proper anisotropic yield function, an ellipse is obtained from a circle by performing the
following linear transformation between stress components:
c
r0xx
¼ a
r0yy
0
0
c
b
rxx
ryy
ð12:7Þ
while the circle in Eq. (12.2) is defined with r0xx ,r0yy and the ellipse in
Eq. (12.6) is defined with rxx ,ryy . Extending an isotropic yield surface to an
anisotropic yield function by linear transformation of their stress components is
a common practice, especially because the method by linear transformation
preserves the convexity of the isotropic yield surface in the anisotropic yield
surface. The practice with real yield surfaces will be briefly summarized
Chap. 14.
Based on several basic features discussed here, the general theory on the yield
surface is explored here, particularly for metals, which have crystal structures.
12.2
Independence on Hydrostatic Stress:
Incompressibility
The most general case of the yield surface specified in Eq. (12.1) would be
nine-dimensional (or six-dimensional, if the symmetry of the stress tensor is considered). However, for metals, yielding is not dependent on the hydrostatic stress
defined in Eq. (9.28). As discussed in Chap. 4, plastic deformation of metals
intrinsically having crystalline structures, is the result of dislocation sliding and
twinning, which are triggered by shear stress. As demonstrated in HW #9.16, the
hydrostatic stress whose principal directions are any direction in space does not
contribute to generate any shear stress. In such a case, the yield function becomes
dependent on the deviatoric stress only; i.e., f ðrÞ ¼ f ðS; trðrÞÞ becomes f ðSÞ so
that the yield surface is described as
204
12 Yield Function
f ðSÞ ¼ constant
ð12:8Þ
which is an eight-dimensional surface in the deviatoric stress space or a
nine-dimensional surface in the Cauchy stress space.
To envision the eight-dimensional surface and the nine-dimensional surface, a
two-dimensional closed line and a three-dimensional cylinder are schematically
plotted in Fig. 12.2 in the three-dimensional space for the normal stress vector
(which was introduced in Fig. 9.3) or for principal stresses. Reducing the dimensions to three or two from nine or eight is mathematically possible by specifying
some small constants to shear stress components for the yield function or considering the three principal stresses for which shear stresses vanish. For the yield
function which is independent on the hydrostatic stress, the yield surface becomes a
cylinder aligned along the hydrostatic line and it intersects with the deviatoric
plane, which is vertical to the hydrostatic line as shown in Fig. 12.2. The
two-dimensional cross-sectional shape on the deviatoric plane is supposed to be a
closed convex line such as a circle. The cross-sectional view of the yield surface on
the deviatoic plane is known as the p diagram.
Note that plastic deformation of metals by dislocation sliding and twinning triggered by shear stress introduces a change in shape but not a change in volume. The
concepts of yielding which is independent on the hydrostatic stress and the volume
constancy of the plastic deformation are separate issues in principle. However, both
are valid and tied together for metals as will be discussed in the next chapter so that
both are referred to as ‘being incompressible’ for simplicity, meaning that, in metal
plasticity (and in this textbook), incompressibility implies both the hydrostatic stress
independence of yielding and the volume preservation of plastic deformation.
Fig. 12.2 Schematic views of a three-dimensional cylinder aligned along the hydrostatic line and
its two-dimensional cross-section on the deviatoric plane. The circular and hexagonal
cross-sections are for the von Mises and Tresca yield surfaces, respectively
12.3
12.3
Isotropy
205
Isotropy
Apart from being independent on the hydrostatic stress of yielding, consider that the
yield function might be isotropic. Physically, this is the case when crystal structures
are randomly oriented so that test results for yielding are insensitive to the directions of specimens prepared for simple tension or combine stress tests. For the
isotropic case, the expression of the yield function is no longer dependent on the
direction of the materially embedded coordinate system such that it becomes a
function of the three invariants of stress.
For the general case, the yield function, f ðrÞ, is dependent on the principal
values and principal directions; i.e.,
f ðrÞ ¼ f ðrI ; rII ; rIII ; ei¼1;2;3 Þ
ð12:9Þ
where rI , rII and rIII are three principal stresses and ei¼1;2;3 are the unit vectors
based on three orthogonal principal vectors. For the isotropic case, the yield
function is independent on the principal directions so that
f ðrÞ ¼ f ðrI ; rII ; rIII Þ
ð12:10Þ
f ðrÞ ¼ f ðI1 ; I2 ; I3 Þ ¼ f ðI1 ; J2 ; I3 Þ
ð12:11Þ
or
where Ii=1,2,3 are the three invariants of stress defined in Eq. (9.28) and J2 is the
second invariant of the deviatoric stress defined in Eq. (9.33). Here, Eq. (9.38) is
also considered. Note that the yield function in Eq. (12.10) is symmetric with
respect to the three principal stresses; i.e., the three principal stresses are interchangeable with their positions in the expression.
Now, consider the case when the yield function is independent on the hydrostatic
stress and isotropic. Then, the yield function becomes
f ðrÞ ¼ f ðSÞ ¼ f ðSI ; SII ; SIII Þ
ð12:12Þ
where SI ; SII and SIII are three principal deviatoric stresses or
f ðrÞ ¼ f ðSÞ ¼ f ðJ1 ; J2 ; J3 Þ ¼ f ðJ2 ; J3 Þ
ð12:13Þ
where Ji=1,2,3 are the three invariants of the deviatoric stress defined in Eq. (9.33)
and J1 = 0.
With the condition of its independence on the hydrostatic stress, the yield surface
is an eight-dimensional surface in the deviatoric stress space or a nine-dimensional
surface in the Cauchy stress space. With the isotropic condition, it is then further
reduced to a two-dimensional closed convex line in the principal deviatoric stress
plane or a three-dimensional cylinder in the principal stress space with a schematic
206
12 Yield Function
Fig. 12.3 The p diagram of
the principal deviatoric plane
for the incompressible,
isotropic and asymmetric case
with the von Mises and
Tresca yield surfaces, which
are not only incompressible
and isotropic but also
symmetric
view of its p diagram shown in Fig. 12.3. Since the diagram is symmetric for the
three principal stresses, the shapes in the regions of AOB and A′OB′ complete the
whole diagram. This is the case when f ðrÞ may not be equal with f ðrÞ: the
asymmetric condition for tension and compression. For the symmetric case with
f ðrÞ ¼ f ðrÞ, the shape in the region of AOB completes the whole diagram with
its symmetry with respect to the origin, as the two examples in the figure show.
For most metals, the symmetric condition is valid since dislocation sliding for
f ðrÞ and f ðrÞ is virtually the same. An example of the asymmetric case is shown
in Fig. 4.11 using typical simple tension and compression test data for magnesium
alloy sheets, which deform mainly by dislocation sliding in tension and by twinning
in compression, resulting in differences in not only in yielding but also in hardening
behavior.
Remark #12.2 Deviatoric normal components on the deviatoric plane for the p
diagram
In the p diagram on the deviatoric plane, which is a cross-sectional shape of the
yield surface for incompressible plasticity in the three-dimensional normal component vector space, the projected axes of the orthogonal three coordinate axes are
120° apart as shown in Fig. 12.3. Also, one unit of any coordinate component
qffiffi
projected on the deviatoric plane shrinks by 23 since (1, 0, 0) is decomposed into
the deviatoric components, (2/3, −1/3, −1/3), and the hydrostatic stress components, (1/3, 1/3, 1/3). Therefore, for the sake of convenience, the p diagram is
qffiffi
magnified by 32 such that component readings on the p diagram match with those
on the real orthogonal coordinate system. Also, note that the three deviatoric normal
components on the two-dimensional deviatoric plane is unique as long as the sum
of the three components vanishes. One convenient way to read out the three normal
deviatoric stress components is to first read out the three normal Cauchy stress
components arbitrarily, which are not unique (or conveniently making any one of
12.3
Isotropy
207
its components equal to zero). Then, decompose this into the deviatoric and
hydrostatic stress components. The non-unique Cauchy stress components differ
only with hydrostatic stress components and share the same unique deviatoric
components. So, it would work to select any convenient Cauchy stress components
and then to proceed. For example, the point of (1, 0, 0) might be (0, −1, −1) or (2,
1, 1) and so on as other possible random choices but they all share (2/3, −1/3, −1/3)
as its deviatoric stress components. Note that discussions here for the deviatoric
stress are also applicable for other deviatoric quantities such as the deviatoric plastic
strain increment, which will be discussed in the next chapter.
Yield functions commonly available in most other literature are now introduced
here. Most of these are incompressible, isotropic and symmetric for tension and
compression.
12.4
von Mises Isotropic Yield Function
Considering Eq. (12.13) for incompressible and isotropic yield functions, one
simple yield function is J2; which is known to be the von Mises yield function
(1913). Its yield surface becomes
1
f ðrÞ ¼ f ðSÞ ¼ f ðJ2 ; J3 Þ ¼ J2 ¼ Sij Sij
2
1 2 1 2
2
2
¼ jSj ¼ ðSI þ SII þ SIII Þ ¼ constant
2
2
ð12:14Þ
which is a sphere in the deviatoric stress space as a size of the deviatoric stress
tensor; therefore, it is convex. Since this yield function is the size of the deviatoric
stress, the yield surface is incompressible, isotropic and symmetric for tension and
compression. The idea behind this isotropic yield function does not differ from that
of Eq. (12.2). The only difference is the incompressible condition added in
Eq. (12.14). When envisioned in the three-dimensional space based on the normal
stress vector space, the von Mises yield surface is a cylinder aligned along the
hydrostatic line with a circular cross-section as shown in Fig. 12.2. Therefore, its p
diagram in the deviatoric principal stress plane is a circle as shown in Fig. 12.3.
The von Mises yield condition or the yield surface described based on the
effective stress as a first order homogeneous yield function, becomes
ðrÞ ¼ r
ðSÞ ¼
f ðrÞ ¼ r
pffiffiffiffiffiffiffiffiffiffiffiffi
aSij Sij ¼ c
ð12:15Þ
where ‘c’ is the yield stress of the reference stress state and a is a constant, which is
determined considering ‘c’.
208
12 Yield Function
Remark #12.3 Yield stress of the reference stress state
Among many possible choices, there are typically five reference stress states that
are most commonly introduced. Since the reference stress states are regarded as a
way to describe mechanical properties, they are defined based on the coordinate
system embedded in the material. Additionally, the reference stress is non-negative
since it defines the size of the yield surface. For the simple tension (ST) stress state,
there is only one non-vanishing stress component, which is the positive normal
stress component with its yield stress as Y+. Meanwhile, the simple compression
(SC) stress state has only one non-vanishing normal stress component, which is
negative and its yield stress is −Y− (< 0). For the balanced biaxial tension
(BBT) stress state, there is one pair of non-vanishing normal stress components,
whose magnitudes are the same and positive with its yield stress as B+. On the other
hand, the balanced biaxial compression (BBC) stress state has one pair of
non-vanishing normal stress components, whose magnitudes are the same and
negative with its yield stress as −B− (< 0). For the pure shear (PS) stress state, the
non-vanishing components are a pair of shear stresses (by symmetry), whose yield
stress is K. The sign of the pure shear yield stress is not significant since its sign
changes when the coordinate system rotates 90° as shown in Fig. 9.7.
For incompressible plasticity, there are close relationships between yield stresses
of the ST, SC, BBT and BBC stress states, which can be easily confirmed in the p
diagram. Since those yield stresses are principal stresses, there exists the following
relationship,
0
Yþ
B
@ 0
0
0
0
1
0
0
C B
0Aþ@
0
0
Y þ
0
0
0
Y þ
0
0
0
Y þ
1
0
0
B
¼ @0
0
0
B
0
0
C
0 A
B
1
0
0
0
C B
þ
¼
0
Y
A @
0
0
0
Y þ
0
1
C
A
ð12:16Þ
in which a hydrostatic stress with its diagonal terms of −Y+ is added to the ST yield
stress since any hydrostatic stress can be added without affecting yielding behavior
in incompressible plasticity. Consequently, YIþ ¼ B
II;III , whose magnitude is
dependent on the loading direction for anisotropy and independent on the loading
þ
direction for isotropy. Similarly, YI ¼ BII;III
, whose magnitude is dependent on the
loading direction for anisotropy and independent on the loading direction for isotropy. If yielding is symmetric for tension and compression, YIþ ¼ B
II;III ¼
þ
YI ¼ BII;III , whose magnitude is dependent on the loading direction for anisotropy
and independent on the loading direction for isotropy. Therefore, If yielding is
symmetric and isotropic, Y ¼ B without any super or subscripts, since the relationship is valid for tension and compression regardless of the loading direction.
12.4
von Mises Isotropic Yield Function
209
HW #12.1
Confirm the relationships between yield stresses discussed in Remark #12.3 using
the p diagram.
HW #12.2
From Eq. (12.15), derive the following for the von Mises yield condition:
8 qffiffiffiffiffiffiffiffiffiffiffiffi
< 3 Sij Sij ¼ Y ¼ B
2
ðrÞ ¼ r
ðSÞ ¼ qffiffiffiffiffiffiffiffiffiffiffiffi
f ðrÞ ¼ r
ð12:17Þ
: 1S S ¼ K
2 ij ij
by substituting the deviatoric stress components of the simple tension, balanced
biaxial and pure shear stress states into Eq. (12.15). Comparing Eqs. (12.14) and
(12.17), confirm that the expressions of the yield function including the effective
stress as a first order homogeneous function are not unique and, furthermore, the
expression of the effective stress is dependent on its reference stress state. The first
expression of Eq. (12.17) is for ST and BB, while the second is for PS.
HW #12.3
The von Mises yield condition expressed in terms of the stress tensor becomes
rffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
i
1h
ðrÞ ¼
r
ðr11 r22 Þ2 þ ðr22 r33 Þ2 þ ðr33 r11 Þ2 þ 6r212 þ 6r223 þ 6r231
2
pffiffiffi
¼ Y ¼ B ¼ 3K
ð12:18Þ
by substituting
1
Sij ¼ rij rkk dij
3
ð12:19Þ
into Eq. (12.17). Perform the derivation. Also, confirm that Eq. (12.18) is equivalent with
rffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
i
1h
ðSÞ ¼
r
ðS11 S22 Þ2 þ ðS22 S33 Þ2 þ ðS33 S11 Þ2 þ 6S212 þ 6S223 þ 6S231
2
pffiffiffi
¼ Y ¼ B ¼ 3K
ð12:20Þ
Therefore, the yield surface is incompressible. Refer to Eq. (9.34) for other
expressions of the von Mises yield function.
Note that for all isotropic yield functions, when they are expressed with the
components of stress or deviatroric stress, their expressions are independent on the
orientation of the coordinate system; therefore, the laboratory coordinate system
may be used for convenience, instead of the materially embedded coordinate
system.
210
12 Yield Function
Fig. 12.4 The ellipse of the
von Mises yield surface under
the plane stress condition and
four reference stress states.
The shaded area corresponds
to the region of AOB in
Fig. 12.3
HW #12.4
When the von Mises yield function is simplified for the plane stress case with the
condition that r33 ¼ r13 ¼ r23 ¼ 0, Eq. (12.18) becomes
ðrÞ ¼
r
qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
pffiffiffi
r211 r11 r22 þ r222 þ 3r212 ¼ r2I rI rII þ r2II ¼ Y ¼ B ¼ 3K
ð12:21Þ
Derive this. Equation (12.21) describes the yield surface, which is an ellipse
with its two principal axes aligned along the lines of rI ¼ rII and rI ¼ rII in the
two-dimensional principal stress space of rI rII (with rIII ¼ 0) as shown in
Fig. 12.4. The ellipse is obtained as an intersectional view of the circular cylinder
shown in Fig. 12.2 with the plane of rIII ¼ 0 and its mathematical derivation will
be further discussed in Chap. 14.
HW #12.5
As an exercise to read out the deviatoric components in the p diagram, four reference stress states are considered, which are defined in the plane stress condition as
shown in Fig. 12.4: simple tension (ST) at (Y, 0, 0), balanced biaxial (BB) at (B, B,
0) and two pure shear states (PS3 and PS2) at (K, −K, 0) and (2K, K, 0),
respectively.
(1) Confirm that the stress components of the four reference stress states satisfy
Eq. (12.21). The normal deviatoric and Cauchy stress components of the four
reference stress states are compared in the p diagram shown in Fig. 12.5. As for
PS3 and PS2, their normal deviatoric stress components are pure shear stress
states as (K, −K, 0) and (K, 0, −K), respectively. Note that the third component
for PS3 equals zero, while the second component of PS2 is zero. They are also
denoted as PLS3 and PLS2, respectively, referring to the plane strain
(PLS) condition, which will be further discussed in Chap. 13.
pffiffiffi
(2) Verify that Y ¼ B ¼ 3K by geometrically comparing the positions of the
four references in the p diagram.
12.5
Tresca Isotropic Yield Function
211
(a)
(b)
(c)
(d)
Fig. 12.5 The normal deviatoric and Cauchy stress components of the four reference stress states
in the p diagram: a simple tension, b balanced biaxial, c pure shear for PS3, d pure shear for PS2
12.5
Tresca Isotropic Yield Function
Considering that plastic deformation is triggered by shear stress when it reaches a
certain size in metal plasticity, and also that the magnitude of the extreme shear
stress is half of the difference between two principal values, the Tresca yield
condition (1864) becomes
ðSI ; SII ; SIII Þ ¼
f ðrÞ ¼ f ðSÞ ¼ r
Smax Smin rmax rmin
Y B
¼
¼ Kð¼ ¼ Þ
2 2
2
2
ð12:22Þ
212
12 Yield Function
where Smax and Smin are maximum and minimum principal deviatoric stresses,
respectively, while rmax and rmin are maximum and minimum principal Cauchy
stresses, respectively. With Eq. (12.22), one of the following conditions is satisfied:
8
< SI SII ¼ rI rII ¼ 2K
S SIII ¼ rII rIII ¼ 2K
ð12:23Þ
: II
SI SIII ¼ rI rIII ¼ 2K
Therefore, the Tresca yield surface is incompressible, isotropic and symmetric
for tension and compression. Equation (12.23) ultimately leads to the following
expression based on the invariants:
1 3 27 2
9 2 2 3 4
J2 J3 K J2 þ K J2 K 6 ¼ 0
16
64
16
2
ð12:24Þ
ðJ2 ; J3 Þ ¼ K.
which is an implicit expression for the yield condition, r
Equation (12.24) also confirms the Tresca yield surface is incompressible, isotropic
and symmetric for tension and compression, considering that J2(−S) = J2(S),
J3(−S) = −J3(S) and J23(−S) = J23(S). Since rmax of the simple tension and balanced
biaxial stress states are Y and B, respectively, while rmin vanishes for both,
Eq. (12.22) leads to Y = B = 2K for the Tresca yield condition.
HW #12.6
In Eq. (12.22), the reference stress state of the effective stress is pure shear. Derive
the effective stress when the reference state is the simple tension or balanced biaxial
stress state.
HW #12.7
Derive Eq. (12.24). (Hint: Solve for cos h and sin h from one of the expressions in
Eq. (12.23), the Tresca yield condition, considering the three principal deviatoric
stresses drived in HW #9.18, and then substitute them into Eq. (9.36). All three
conditions in Eq. (12.23) lead to the same result since the Tresca yield condition is
supposed to be valid for all three conditions. Derivation utilizing the second
expression in Eq. (12.23) and Eq. (9.35) is short, while the remaining expressions
in Eq. (12.23) involve a lengthy derivation.)
With Eq. (12.22), the Tresca yield surface is a cylinder in the three-dimensional
principal stress vector space, which is aligned along the hydrostatic line with the
hexagonal cross-section on the deviatoric plane as shown in Figs. 12.2 and 12.3.
One way to derive the hexagon in the p diagram is with, rI rII rIII ð¼ 0Þ for
Region I shown in Fig. 12.6. Then, by the third equation of Eq. (12.23),
rI ¼ 2K ¼ Y,rIII ¼ 0, while 0 rII 2K ¼ Y, which represents the straight line
shown in Fig. 12.6. Similarly, the lines in the remaining five regions are obtained.
HW #12.8
Complete the derivation of the hexagon for all regions of the p diagram shown in
Fig. 12.6.
12.5
Tresca Isotropic Yield Function
213
Fig. 12.6 The hexagon in the
p diagram of the Tresca yield
surface
The yield surface in the two-dimensional principal stress space, rI rII (with
rIII ¼ 0) is shown in Fig. 12.7, which is an intersectional view of the hexagonal
cylinder shown in Fig. 12.2 with the plane of rIII ¼ 0. To derive the
two-dimensional shape, consider rI rII rIII ð¼ 0Þ for Region I shown in
Fig. 12.7. Then, by the third equation of Eq. (12.23), rI ¼ 2K ¼ Y, while
0 rII 2K ¼ Y, which represents the straight line shown in Fig. 12.7. For
Region II, consider rI rIII ð¼ 0Þ rII . Then, by the first equation of Eq. (12.23),
rI rII ¼ 2K ¼ Y as shown in Fig. 12.7. Similarly, the lines in the remaining four
regions are obtained.
HW #12.9
Complete the derivation for all regions of the two-dimensional Tresca yield shape
under the plane stress condition shown in Fig. 12.7.
Fig. 12.7 The Tresca yield
surface under the plane stress
condition and four reference
stress states
214
12 Yield Function
HW #12.10
As an exercise in reading out the deviatoric components in the p diagram, four
reference stress states are considered, which are defined in the plane stress condition
as shown in Fig. 12.7: ST at (Y, 0, 0), BB at (B, B, 0), PS3 and PS2 at (K, −K, 0)
and (2K, K, 0), respectively.
(1) Confirm that the stress components of the four reference stress states satisfy
Eq. (12.22).
(2) Verify that Y = B = 2K, by geometrically comparing the positions of the four
references in Fig. 12.7. The normal deviatoric and Cauchy stress components
of the four reference stress states are compared in the p diagram shown in
Fig. 12.8. As for PS3 and PS2, their normal deviatoric stress components are
pure shear stress states as (K, −K, 0) and (K, 0, −K), respectively.
(a)
(b)
(c)
(d)
Fig. 12.8 The normal deviatoric and Cauchy stress components of the four reference stress states
in the p diagram: a simple tension, b balanced biaxial, c pure shear for PS3, d pure shear for PS2
12.5
Tresca Isotropic Yield Function
215
(3) Verify that Y = B = 2K by geometrically comparing the positions of the four
references in the p diagram.
12.6
Drucker Isotropic Yield Function
The Drucker yield condition (1949) is defined as
J2
6 ðJ2 ; J3 Þ ¼ J23 1 n 33 ¼ K 6
f ðrÞ ¼ f ðSÞ ¼ f ðJ2 ; J3 Þ ¼ r
J2
ð12:25Þ
which is incompressible, isotropic and symmetric for tension and compression.
Note that the Drucker yield condition becomes the von Mises yield condition when
n ¼ 0. Therefore, the Drucker yield condition is an extension of the von Mises yield
condition with one additional material constant, n, which modifies the shape of its
yield surface from that of the von Mises yield surface.
For the yield function, which is incompressible, isotropic and symmetric, its
whole p diagram is determined by the shape of the region of AOB shown in
Fig. 12.3. Therefore, the shape modification by n is considered here between the
simple tension and the pure shear stress states, especially considering the plane
stress condition. The principal stress state of the particular zone under the plane
stress condition becomes ðrI ; rII ; 0Þ ¼ rI ð1; a; 0Þ where a ¼ rII =rI and 1 a 0
with a ¼ 1 and a ¼ 0 for the pure shear (PS3) and the simple tension, respectively. Then,
8
r2I
2
>
>
< J2 ¼ 33 ð1 a þ a Þ
r
J3 ¼ 27I ða 2Þð2a 1Þð1 þ aÞ
>
2
>
J
: 33 ¼ ðða2Þð2a1Þð1 þ3 aÞÞ2
J2
The value of
J32
J23
ð12:26Þ
27ð1a þ a2 Þ
plotted in Fig. 12.9 shows a monotonous increase of its value;
therefore, suggesting a similarly monotonous increase in the modification of the
shape, in the particular zone from the pure shear to the simple tension.
As for rI , the following is obtained from Eq. (12.25):
pffiffiffi
ðða 2Þð2a 1Þð1 þ aÞÞ2
rI ða; nÞ ¼ 3K ð1 a þ a2 Þ3 1 n
27ð1 a þ a2 Þ3
!!16
ð12:27Þ
216
12 Yield Function
Fig. 12.9 The increase in value of
J32
J23
from the pure shear (with a ¼ 1) to simple tension (with
a ¼ 0) under the plane stress condition
which determines the yield surface shape in the particular zone. Note that
rI ða ¼ 0; nÞ ¼ Yð¼ BÞ, while rI ða ¼ 1; nÞ ¼ K, so that
K6 ¼
ð27 4nÞ 6 ð27 4nÞ 6
Y ¼
B
272
272
ð12:28Þ
When rI ða; nÞ is normalized with that of the von Mises yield function, which is
rI ða; n ¼ 0Þ,
rI ða; nÞ
¼
rI ða; n ¼ 0Þ
1n
ðða 2Þð2a 1Þð1 þ aÞÞ2
27ð1 a þ a2 Þ3
!16
1
J32 6
¼ 1n 3
J2
ð12:29Þ
9
which is plotted in Fig. 12.10 for its convexity condition, 27
8 n 4. The plot
confirms that the pure shear stress state is preserved for all n values (with J3 ¼ 0 for
a ¼ 1) and that the simple tension stress state moves out from the von Mises case
as positive values of n increase and moves in as negative values of n increase as
shown in Figs. 12.11 and 12.12 in the shaded zones.
HW #12.11
The reference stress state of the effective stress defined in Eq. (12.25) is pure shear.
Derive the following expression based on the effective stress when the reference
stress state is the simple tension or balanced biaxial stress state:
6 ðJ2 ; J3 Þ ¼
r
272
J2
J23 ð1 n 33 Þ ¼ Y 6 ¼ B6
ð27 4nÞ
J2
ð12:30Þ
12.6
Drucker Isotropic Yield Function
217
I ða;nÞ
Fig. 12.10 The variation of rIrða;n¼0Þ
from the pure shear (with a ¼ 1) to the simple tension (with
a ¼ 0) under the plane stress condition
Fig. 12.11 The Drucker yield surface under the plane stress condition and four reference stress
states
218
12 Yield Function
Fig. 12.12 The p diagram of
the Drucker yield surface and
four reference stress states
Fig. 12.13 The Drucker
yield surface with the
reference state of the simple
tension stress state under the
plane stress condition and
four reference stress states
The yield surface is valid for the reference state for all n values so that the yield
surfaces of Eq. (12.25) share the same pure shear stress states for all n values, while
those of the yield surfaces of Eq. (12.30) share the same simple tension and balanced biaxial stress states as shown in Figs. 12.13 and 12.14. The reference stress
state change only affects the size of the yield surface but not the shape itself so that
it does not generally affect the convexity condition. Therefore, the convexity
9
condition of the yield condition defined in Eq. (12.30) is 27
8 n 4.
12.6
Drucker Isotropic Yield Function
219
Fig. 12.14 The p diagram of the Drucker yield surface with the reference state of the simple
tension stress state and four reference stress states
HW #12.12
Modified Drucker yield function
There is a modified Drucker yield function defined as
2 ðJ2 ; J3 Þ ¼ J2 ð1 n
r
J32
Þ ¼ K2
J23
ð12:31Þ
whose reference state is the pure shear stress state. Considering the following
relationship,
K2 ¼
ð33 4nÞ 2 ð33 4nÞ 2
Y ¼
B
81
81
ð12:32Þ
the version whose reference state is the simple tension state becomes
81
J32
ðJ2 ; J3 Þ ¼ 3
J2 1 n 3 ¼ Y 2 ¼ B2
r
ð3 4nÞ
J2
2
ð12:33Þ
3
Derive this. Both have the same convexity condition: 27
32 n 4. The yield
surface shapes for Eqs. (12.31) and (12.33) under the plane stress condition and in
the p diagram are shown in Figs. 12.15, 12.16, 12.17 and 12.18, respectively.
220
12 Yield Function
Fig. 12.15 The modified Drucker yield surface with the reference state of the pure shear stress
state under the plane stress condition and four reference stress states
Fig. 12.16 The p diagram of
the modified Drucker yield
surface with the pure shear
stress reference state and four
reference stress states
12.6
Drucker Isotropic Yield Function
221
Fig. 12.17 The modified Drucker yield surface with a simple tension stress reference state under
the plane stress condition and four reference stress states
Fig. 12.18 The p diagram of the modified Drucker yield surface with a simple tension stress
reference state and four reference stress states
222
12.7
12 Yield Function
Non-quadratic Isotropic Yield Functions Generalized
from von Mises Yield Function
When the effective stress of the von Mises yield function is expressed with principal
deviatoric stresses, the following two versions are available which have been
derived from Eqs. (12.15) and (12.20), respectively:
8n o1
>
< a jSI j2 þ jSII j2 þ jSIII j2 2
¼ n r
o1
>
: a jSI SII j2 þ jSII SIII j2 þ jSIII SI j2 2
ð12:34Þ
where a is a constant to be determined by considering the reference stress state.
Their non-quadratic versions extended from them are
¼ a jSI jM þ jSII jM þ jSIII jM
r
1
M
ð12:35Þ
and
¼ a jSI SII jM þ jSII SIII jM þ jSIII SI jM
r
1
M
ð12:36Þ
The version in Eq. (12.36) is known as the effective stress of the Hosford yield
function (1972).
HW #12.13
M
For the version in Eq. (12.35), a ¼ 2 þ3 2M or a ¼ 12, respectively, when the reference
state is the simple tension (and balanced biaxial) or the pure shear. Also,
M M1
Y ¼ B ¼ 1 þ32M1 K. Derive them.
HW #12.14
For the effective stress of the Hosford yield function, a ¼ 12 or a ¼ 2M 1þ 2, respectively, when the reference state is the simple tension (and balanced biaxial) or the
1
pure shear state. Also, Y ¼ B ¼ ð1 þ 2M1 ÞM K. Derive them.
Both versions defined by Eqs. (12.35) and (12.36) are convex for M 1:0,
regardless of their reference stress states, and they become the von Mises yield
function with M = 2.0 or 4.0. Particularly for the Hosford yield surface, as the M
value increases from 1.0 to 2.0 or decreases from ∞ to 4.0, the yield surface
transforms from the Tresca to von Mises yield function as shown in Fig. 12.19a, b
with the simple tension reference state. Between M = 2.0 and 4.0, the yield function bulges out beyond the shape of the von Mises yield function, particularly as the
M values increases from 2.0 to 2.767 and then deceases back to 4.0 as shown in
Fig. 12.19c. Such details regarding how the M value affects the shape of the yield
surface are similar for both versions defined by Eqs. (12.35) and (12.36), regardless
12.7
Non-quadratic Isotropic Yield Functions …
223
Fig. 12.19 The Hosford yield surface: a 1:0 M 2:0, b 4:0 M 1, c 20 M 4:0
of the reference stress states. The yield surface shapes for Eqs. (12.35) and (12.36)
under the plane stress condition in the p diagram are shown in Figs. 12.20, 12.21,
12.22 and 12.23 for 4:0 M\1, respectively.
HW #12.15
The p diagrams of the two versions defined in Eqs. (12.35) and (12.36) have the
same shapes but are offset by a 30° rotation, when their reference stress states and
M values are the same. Prove this algebraically. (Hint: Considering the relationships
for the principal deviatoric stresses on the deviatoric plane shown in Eqs. (9.34) and
(9.35), convert the expressions of the two yield conditions into those on the polar
coordinate and compare them.)
224
12 Yield Function
Fig. 12.20 The yield surface defined in Eq. (12.35) with a simple tension reference state and four
reference stress states: a under the plane stress condition and b the p diagram
12.7
Non-quadratic Isotropic Yield Functions …
225
Fig. 12.21 The yield surface defined in Eq. (12.35) with a pure shear reference state and four
reference stress states: a under the plane stress condition and b the p diagram
226
12 Yield Function
Fig. 12.22 The Hosford yield surface with the simple tension reference state and four reference
stress states: a under the plane stress condition and b the p diagram
12.7
Non-quadratic Isotropic Yield Functions …
227
Fig. 12.23 The Hosford yield surface with a pure shear reference state and four reference stress
states: a under the plane stress condition and b the p diagram
228
12 Yield Function
HW #12.16
The Hosford yield function becomes the Tresca yield function when M = 1.0.
Confirm this by plotting the p diagram and the yield surface under the plane stress
condition for the Hosford yield surface. (Hint: Consider the plane stress condition
with rIII ¼ 0 for both surfaces.)
Note that the yield surface of the version defined in Eq. (12.35) somewhat
resembles the Drucker yield surface when the n value is negative, while the Hosford
yield surface somewhat resembles the Drucker yield surface when the n value is
positive.
12.8
Hill 1948 Quadratic Anisotropic Yield Function
The quadratic anisotropic yield function proposed by Hill 1948 is defined by
2 ¼ F(ryy rzz Þ2 þ G(rzz rxx Þ2 þ H(rxx ryy Þ2
f ðrÞ ¼ r
þ 2Lr2yz þ 2Mr2zx þ 2Nr2xy
ð12:37Þ
which is incompressible and symmetric for tension and compression. This is for
anisotropic materials, which have three mutually orthogonal planes of symmetry
and x, y and z are parallel to the three symmetry planes (therefore, the rectangular
Cartesian coordinate system is embedded in the material). There are six anisotropic
constants, F, G, H, L, M and N, which should be determined by properly considering the reference stress state. A comparison with Eq. (12.18) suggests that, if
F = G = H and L = M = N = 3F, this reduces to the von Mises yield function, for
which F becomes 1/2 or 1/6 when the reference state is simple tension (and balanced biaxial) or pure shear, respectively. Since the rolled sheet has three mutually
orthogonal planes of symmetry, this yield function is commonly applied for metal
sheets, for which x, y and z are the rolling, transverse and thickness directions, as
will be further discussed in Chap. 14.
12.9
Drucker-Prager Compressible Isotropic Yield
Function
For non-metallic materials, which are compressible (or expandable) by hydrostatic
stress such as soil, the following Drucker-Prager isotropic yield function (1952) is
available
ðI1 ; J2 ; I3 Þ ¼
ðI1 ; I2 ; I3 Þ ¼ r
r
pffiffiffiffiffiffiffiffiffi
2aJ2 þ bI1
ð12:38Þ
12.9
Drucker-Prager Compressible Isotropic Yield Function
Fig. 12.24 A cone in the
principal stress space for the
Drucker-Prager compressible
isotropic yield function when
a the b value is positive and
b the b value is negative
229
(a)
||
(b)
||
Fig. 12.25 A double-cone in
the principal stress space for
the modified Drucker-Prager
compressible isotropic yield
function when the b value is
positive
||
where Ii=1,2,3 are the three invariant of the Cauchy stress, J2 is the second invariant
of the deviatroic stress and Eq. (9.38) is considered. There are two constants, which
should be determined by properly considering the reference state. Its yield surface is
a cone aligned along the hydrostatic line in the three-dimensional principal stress
space as schematically shown in Fig. 12.24. Its variations are
230
12 Yield Function
Fig. 12.26 An ellipsoid in
the principal stress space for
the modified Drucker-Prager
compressible isotropic yield
function when the b value is
positive
||
¼
r
pffiffiffiffiffiffiffiffiffi
2aJ2 þ bjI1 j
ð12:39Þ
which is a double-cone symmetric with respect to the deviatroic plane as
schematically shown in Fig. 12.25 or
¼
r
qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
2aJ2 þ bI12
ð12:40Þ
which is an ellipsoid aligned along the hydrostatic line and the deviatroic plane as
schematically shown in Fig. 12.26. These three compressible yield functions
become the incompressible von Mises effective stress when b ¼ 0.
References
Drucker, D. C. (1949). The relation of experiments to mathematical theories of plasticity. Journal
of Applied Mechanics, 16, 349–357.
Drucker, D. C., & Prager, W. (1952). Soil mechanics and plastic analysis or limit design.
Quarterly of Applied Mathematics, 10, 157–165.
Hill, R. (1948). A theory of the yielding and plastic flow of anisotropic metals. In Proceedings of
the Royal Society of London (p. 281).
Hosford, W. (1972). A generalized isotropic yield criterion. Journal of Applied Mechanics, 39,
607–609.
Tresca, H. (1864). Mémoire sur l’écoulement des corps solides soumis à de fortes pressions. C.R.
Acad. Sci. Paris, 59, 754.
Von-Mises, R. (1913). Mechanik der festen Körper im plastisch deformablen Zustand. Gött.
Nachr. Math. Phys Klasse, 1, 582–592.
Chapter 13
Normality Rule for Plastic Deformation
As for plastic deformation, in order to account for the deformation path (or history)
dependent on mechanical properties in plasticity, the plastic (natural) strain increment, dep ð¼Dp dtÞ, is extensively applied as discussed in Remark #11.4. The plastic
strain increment is assumed to be added to the elastic strain increment, dee , to
construct the total strain increment, i.e.,
de ¼ dee þ dep
ð13:1Þ
which is for elasto-plasticity in metal plasticity. When plastic deformation is large
enough in some applications such as metal forming, elastic deformation is ignored;
i.e.,
de ¼ dep
ð13:2Þ
which is for rigid-plasticity. The constitutive formulation for elasto-plasticity is
much more complex than that of rigid-plasticity as will be detailed in Chap. 16;
therefore, rigid-plasticity was more popular in the early development stage of
numerical commercial codes decades ago. However, there are some critical occasions, in which the proper analysis of elasticity/elasto-plasticity is required even in
metal forming. This is especially the case when elastic unloading is involved such
as when internal cracks form by residual stress in bulk forming and springback in
sheet forming. With recent advancements in computational hardware,
elasto-plasticity has become dominant even for metal forming except in a few cases
such as the code for the ideal forming theory known as the inverse one-step process
design code.
As for the plastic strain increment, its direction is guided by the so called
normality rule that (prior to having any information on its magnitude) states that
the direction is normal to a surface defined with the plastic potential in the
nine-dimensional space (or six-dimensional space if the symmetry of the shear
components is considered). Similar to the yield function, the plastic potential is
© Springer Nature Singapore Pte Ltd. 2018
K. Chung and M.-G. Lee, Basics of Continuum Plasticity,
https://doi.org/10.1007/978-981-10-8306-8_13
231
232
13
Normality Rule for Plastic Deformation
applied to describe a surface. If the yield function is used as the plastic potential,
then the normality rule is known as the associate flow rule. Otherwise, it is known
as the non-associate flow rule. Despite some recent research activities on the
non-associated flow rule, the associate flow rule is the most common in metal
plasticity and therefore, it is considered in this textbook.
In the associate flow rule, the yield surface defined with the yield function is not
only the boundary of elasticity but furthermore, its normal direction is aligned with
the plastic strain increment; i.e.,
dep ¼ dk
@f ðrÞ
@
rðrÞ
@
rðrÞ
¼ dk
ð¼de
Þ
@r
@r
@r
ð13:3Þ
where dk is an incremental quantity and generally not a constant. The yield
function, f ðrÞ, in Eq. (13.3) is not unique and any yield functions are applicable if
they express the same yield surface. However, using the effective stress is particularly convenient to develop further formulations; therefore, the plastic potential is
assumed to be the effective stress in this textbook, unless it is otherwise stated.
13.1
Effective Plastic Strain Increment and Duality
in Normality Rule
ðrÞ ¼ constant describes
For the effective (or equivalent) stress, the expression of r
a surface but it also assigns a fixed constant scalar value for any given stress, in
which the effective stress plays a role in defining a generalized magnitude of the
stress. Similarly, for the plastic strain increment, a conjugate quantity known as the
effective (or equivalent) strain increment de exists, whose expression of
deðdep Þ ¼ constant describes a surface as well as a generalized magnitude of the
plastic strain increment.
The effective plastic strain increment, which is a conjugate to a given effective
stress, or vice versa, is defined by the following plastic work equivalence
principle:
2 2;p
ðrÞdeðdep Þ
dwp ¼ trðrdep Þ ¼ r dep ¼ rij depij ð¼ r1ij de1;p
ij ¼ rij deij ¼ . . .Þ ¼ r
¼ constant
ð13:4Þ
To develop the conjugate, there are two procedures to apply the plastic work
equivalence principle: which can be described as figurative and algebraic procedures. As for the figurative procedure, consider Fig. 13.1, in which the stress and
plastic strain increments are considered as nine-dimensional vectors and dwp is their
dot product, while the stress stays on the yield surface whose size is defined by its
ðrÞ ¼ constant. As for the plastic strain increment, its direction is
reference stress: r
normal to the yield surface and, when the size of the dot product of the two vectors
13.1
Effective Plastic Strain Increment and Duality in Normality Rule
233
Fig. 13.1 Schematic view of a the yield surface and b the effective plastic strain increment
surface in the nine-dimensional space constructed by the plastic work equivalence principle
are fixed as dwp = constant, its size is determined by Eq. (13.4) so that the plastic
strain increment vectors construct a surface, whose size is also defined by its
reference plastic strain increment; i.e.,
ðrÞ
deðdep Þ ¼ constant ¼ dwp =constant defined by r
ð13:5Þ
which defines the effective plastic strain increment and its surface is known as the
effective plastic strain increment surface.
Furthermore, for the constant plastic work increment, Eq. (13.4) becomes
dðdwp Þ ¼ dr dep þ r dðdep Þ ¼ 0
ð13:6Þ
where dr is the increment between the neighboring stresses on the yield surface;
therefore, dr is tangential to the yield surface as shown in Fig. 13.1a. Then, by the
normality rule of Eq. (13.3), dr is normal to dep so that dr dep ¼ 0.
Consequently, r dðdep Þ ¼ 0, in which dðdep Þ is tangential to the effective plastic
strain increment surface and r is normal to the surface as shown in Fig. 13.1b; i.e.,
r¼A
@dgðdep Þ
@deðdep Þ
@deðdep Þ
¼A
ð¼
r
Þ
p
p
@ ðde Þ
@ ðde Þ
@ ðdep Þ
ð13:7Þ
where dgðdep Þ is the plastic strain increment function. The plastic strain increment
function defines the effective plastic strain increment surface just as the yield
function defines the yield surface, and whose first order homogeneous function is the
effective plastic strain increment. The two normality rules shown in Eqs. (13.3) and
(13.7) are dual normality rules for the conjugate effective stress and the effective
plastic strain rate increment. The plastic strain increment function is not unique for
the same effective plastic strain increment surface and even the effective plastic strain
increment becomes unique when its reference plastic strain state is prescribed.
234
13
Normality Rule for Plastic Deformation
Remark #13.1 The effective plastic strain increment is a first order homogenous
function
Since the effective stress is a first order homogenous function, so is the effective
plastic strain increment as proven here:
ðarÞdeðbdep Þ ¼ a
ðarÞ ðbdep Þ ¼ abdwp ¼ ab
rðrÞdeðdep Þ ¼ r
rðrÞbn deðdep Þ
ð13:8Þ
Therefore, n = 1.
As for dk in Eqs. (13.3), apply Eq. (13.3) for Eq. (13.4), then
r dep ¼ dk
@
rðrÞ
ðrÞdeðdep Þ
r ¼ dk
rðrÞ ¼ r
@r
ð13:9Þ
after Eq. (12.5) is considered with n = 1. Therefore, dk ¼ deðdep Þ. Similarly,
ðrÞ.
applying Eq. (13.7) for Eq. (13.4) leads to A = r
ðrÞ, Eq. (13.3)
As for the algebraic procedure to obtain de as a conjugate of r
provides a set of simultaneous equations for r when dep is prescribed. Therefore, its
solution becomes
r ¼ rðdep Þ
ð13:10Þ
Then, de as a function of dep is algebraically obtained as
de ¼
rðdep Þ dep
ðrðdep ÞÞ
r
ð13:11Þ
Note that the solution of Eq. (13.10) for Eq. (13.3) often involves a highly
nonlinear solution scheme; therefore, the analytical expression of de is not availðrÞ is rather simple such as those of the quadratic von Mises and Hill
able, unless r
1948 effective stresses. In such a case, the following manipulation is performed for
deðdep Þ ¼
r dep
ðrÞ
r
ð13:12Þ
ðrÞ.
in which r is normalized by r
Note that, by the duality of the normality rules shown in Eqs. (13.3) and (13.7),
the roles and shapes of the effective plastic strain increment surface and the yield
surface are interchangeable. As such, the two procedures to obtain deðdep Þ as a
ðrÞ are applicable to obtain r
ðrÞ as a conjugate of a
conjugate of a prescribed r
prescribed deðdep Þ. Still the main difference remains that the yield surface is the
boundary of elasticity, while the effective plastic strain increment surface has
nothing to do with elasticity.
13.1
Effective Plastic Strain Increment and Duality in Normality Rule
235
Remark #13.2 Accumulative effective plastic strain
Considering that the effective plastic strain increment is a generalized magnitude of
the plastic strain increment, it is integrated to measure the amount of the plastic
deformation in plasticity; i.e.,
Z
e ¼ deðdep Þ
ð13:13Þ
which is known as the accumulative effective plastic strain. This is similar to the
concept of travel length in geometry,
Z
Z
s ¼ dsðdxÞ ¼ jdxj
ð13:14Þ
where dx is the displacement increment. The accumulative effective plastic strain is
extensively used to formulate the property change by plastic deformation in plasticity.
Remark #13.3 Note that the standard elasto-plastic constititutive formation with
Eq. (13.1) is based on the normality rule in Eq. (13.3) so that it requires the yield
function as well as its diverse development. Meanwhile, the standard rigid-plastic
formulation is based on the normality rule in Eq. (13.7) so that it requires the plastic
strain increment function as well as its diverse development. However, the effective
plastic strain increment is required in order to calculate the accumulative effective
plastic strain in Eq. (13.13). Since rigid-plasticity is based on the plastic strain
increment function, calculating the accumulative effective plastic strain is
straightforward. For elasto-plasticity, a standard formulation to be discussed in
Chap. 16 calculates the magnitude of the effective plastic strain increment, without
requiring the explicit expression of the effective plastic strain increment as a
function of the plastic strain increment tensor. Similarly, rigid-plasticity does not
require the explicit expression of the effective stress as a function of the stress
tensor in order to calculate the size of the yield stress. Consequently,
elasto-plasticity requires only the effective stress as a function of the stress tensor,
while rigid-plasticity requires only the effective plastic strain increment as a
function of the plastic strain increment tensor. These will be discussed in Chap. 16.
Remark #13.4 The yield function and the plastic strain increment function are
generally nine-dimensional and become six-dimensional if the symmetry of the
shear components is considered. However, when the dual normality rules are
applied, they are applied for the nine components of the stress and plastic strain
increment tensors, treating each shear component separately.
13.2
Incompressibility
As discussed previously, metals with crystalline structures plastically deform by
dislocation sliding and twinning, triggered by shear stresses. While doing so, they
maintain the same volume, so that they are described to be incompressible.
Mathematically, therefore, their plastic strain increment is deviatoric; i.e.,
236
13
Normality Rule for Plastic Deformation
trðdep Þ ¼ depii ¼ ~I1 ¼ 0
ð13:15Þ
where ~I1 is the first invariant of the plastic strain increment. This can be proven
figuratively based on the normality rule; i.e., considering that their yielding is also
independent of the hydrostatic stress so that their yield surface is a cylinder in the
three-dimensional normal stress space, as shown in Fig. 12.2. When the normaility
rule in Eq. (13.3) is applied, the plastic strain increment stays on the deviatoric
plane as shown in Fig. 12.2, regardless of the cross-sectional shape of the cylinder.
Consequently, by the normality rule, the fact that the hydrostatic stress is independent of the yield stress and that the plastic strain increment maintains a constant
volume are tied together in metal plasticity and both properties are conveniently
implied by “being incompressible”.
The deviatoric nature of the plastic strain increment is also proven algebraically
from the normality rule; i.e.,
ð13:16Þ
since the yield function is not a function of the hydrostatic stress. Therefore,
depij ¼ depij , where dep is the deviatoric plastic strain increment. Alternatively,
ð13:17Þ
Therefore, considering
0
1
0
1
2
1
1
S11
3 r11 3 r22 3 r33
1
2
B S22 C B r11 þ r22 1 r33 C
3
3
C B 3
C
B
B S33 C B 1 r11 1 r22 þ 2 r33 C
3
3
C B 3
C
B
C
B S12 C B
r12
C B
C
B
C;
B S21 C ¼ B
r21
C B
C
B
C
B S23 C B
r23
C B
C
B
C
B S32 C B
r32
C B
C
B
A
@ S13 A @
r13
S31
r31
0
dep11
B dep22
B p
B de33
B p
B de
B 12
B dep
B 21
B dep
B 23
B dep
B 32
@ dep
13
dep31
0
2 @f
1 @f
1 @f
3 @S11 3 @S22 3 @S33
B 1 @f þ 2 @f 1 @f
B
3 @S33
22
C B 31 @S@f11 13 @S
@f
2 @f
C B
C B 3 @S11 3 @S22 þ 3 @S33
C B
@f
C B
@S12
C B
@f
CB
@S21
C B
C B
@f
C B
@S23
C B
@f
C B
@S32
A B
B
@f
@
@S13
@f
@S31
1
1
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
A
so that Eq. (13.15) is valid for any differentiable function of the deviatoric stress.
Another algebraic proof would be to perfrom the normality rule by Eq. (13.3) for
f(S) after converting it to f ðrÞ, while considering the definition of the deviatoric
stress. Then, f ðrÞ represents a cylinder so that the normality rule leads to the
13.2
Incompressibility
237
deviatoric plastic strain increment for any differentiable function of the deviatoric
stress, f(S).
Remark #13.5 Incompressible property and isochoric/equivoluminal deformation
As for the constancy of volume, being incompressible is to account for a material
property, while being isochoric or equivoluminal describes deformation. Therefore,
the deformation of an incompressible material is necessarily isochoric, while the
deformation of a compressible material may or may not be isochoric.
Remark #13.6 Applying the normality rule in Eq. (13.3) figuratively and algebraically leads to the two-dimensional membrane of the plastic strain increment
surface in the three-dimensional normal stress component space, while the conjugate yield surface is a three-dimensional cylinder. However, constructing a
three-dimensional cylindrical yield surface from the two-dimensional plastic strain
increment surface based on the dual normality rule in Eq. (13.7) would be troublesome algebraically. A figurative justification would be possible by considering
the two-dimensional membrane as the limit of a thin three-dimensional closed
structure having a smooth curved side wall (with a half circular cross-section),
when its thickness converges to zero. Then, the normal direction of its side wall
would cover all possible hydrostatic stress, which is vertical to the deviatoric plane
as shown in Fig. 13.2.
Now, for incompressible plasticity, the plastic strain increment function or the
effective plastic strain increment that describes its surface is a function of the
deviatoric plastic strain exclusively; i.e.,
dgðdep Þ ¼ dgðdep ; trðdep ÞÞ ¼ dgðd ep Þ ¼ constant
ð13:18Þ
where dep is the deviatoric plastic strain increment, while its yield function is in
Eq. (12.8). However, there is a major difference between the two equations in that
Eq. (12.8) is valid when the hydrostatic stress is arbitrary, while Eq. (13.18) is valid
when the hydrostatic plastic strain increment is zero. The yield surface is a cylinder in
the nine-dimensional stress space, while the plastic strain increment surface is an
eight-dimensional surface even in the nine-dimensional plastic strain increment space.
To avoid confusion, expressing all in the eight-dimensional deviatoric space is
convenient for incompressible plasticity; i.e.,
Fig. 13.2 The normal direction of the curved side wall of a thin three-dimensional closed
structure assumed for the plastic strain increment surface covers all possible hydrostatic stress,
which is vertical to the deviatoric plane
238
13
Normality Rule for Plastic Deformation
1
1
ðSÞdeðdep Þ
dwp ¼ rij depij ¼ ðSij þ rkk dij Þðdepij þ depmm dij Þ = Sij depij = Sij depij ¼ r
3
3
¼ constant
ð13:19Þ
considering Eq. (13.15) and depij ¼ depij . Therefore, the plastic work equivalence
principle also provides a theoretical base to express two effective quantities in the
deviatoric space.
As for the normality rule,
dep ð¼dep Þ ¼ dk
@f ðSÞ
@
rðSÞ
@
rðSÞ
¼ dk
ð¼deðdep Þ
Þ
@S
@S
@S
ð13:20Þ
for which the yield function is symmetric with respect to the deviatoric plane as
schematically shown in Fig. 13.3a, b. Note that the yield function shown in
Fig. 13.3c is not symmetric. Now, based on the plastic work equivalence principle
in Eq. (13.19), the dual normality rule becomes,
S¼A
@dgðdep Þ
@dep ðdep Þ
@dep ðdep Þ
@dep ðdep Þ
¼
A
¼
A
ð¼
r
ðSÞ
Þ
@ ðdep Þ
@ ðdep Þ
@ ðdep Þ
@ ðdep Þ
ð13:21Þ
for which the plastic strain increment function is symmetric with respect to the
deviatoric plane. Equation (13.21) leads to
ðSÞ
r¼r
@dep ðdep Þ
þ BI
@ ðdep Þ
ð13:22Þ
where B is an arbitrary constant for arbitrary hydrostatic stress and I is the identity
tensor.
(a)
(b)
(c)
Fig. 13.3 Schematic view of yield surfaces in the normal stress space, a and b are symmetric with
respect to the deviatoric plane such that their normal directions on the deviatoric plane are on the
deviatoric plane. Note that c is not symmetric
13.2
Incompressibility
239
The procedures to derive dk and A in Eqs. (13.20) and (13.21) and also to obtain
the conjugate effective quantities for prescribed effective quantities in incompressible plasticity are the same with those previously discussed for the general case.
In a strict sense, metals are compressible because their crystal structures usually
have defects such as micro-voids, which may become smaller under very large
hydrostatic compression. However, incompressibility is commonly accepted in
metal plasticity for moderate hydrostatic stress.
13.3
Isotropy
As for the plastic strain increment surface, it is a nine-dimensional surface in the
plastic strain increment tensor space generally as a conjugate of the
nine-dimensional yield surface. For the isotropic case, aside from being incompressible, the plastic strain increment function is only dependent on the principal
values of the plastic strain increment; i.e.,
dgðdep Þ ¼ dgðdepI ; depII ; depIII Þ
ð13:23Þ
J2 ; ~I3 Þ
dgðdep Þ ¼ dgð~I1 ; ~I2 ; ~I3 Þ ¼ dgð~I1 ; ~
ð13:24Þ
or
where depI , depII and depIII are three principal plastic strain increments and ~Ii¼1;2;3 are
the three invariants of the plastic strain increment defined in Eq. (9.28), while ~
J2 is
the second invariant of the deviatoric plastic strain increment. Note that the function
in Eq. (13.23) is symmetric with respect to the three principal values.
Now, consider the case when the plastic strain increment function is incompressible and isotropic. Then, the plastic strain increment function becomes
dgðdep Þ ¼ dgðdepI ; depII ; depIII Þ
ð13:25Þ
dgðdep Þ ¼ dgð~J2 ; ~J3 Þ
ð13:26Þ
or
where depI , depII and depIII are three principal plastic strain increments, which are
deviatoric, and ~Ji¼1;2;3 are the three invariants of the deviatoric plastic strain
increment with ~J1 ¼ 0.
As for the p diagram of the incompressible and isotropic plastic strain increment
surface in its principal value space, the shapes in the regions of AOB and A’OB’
complete the whole diagram by symmetry as shown in Fig. 12.3. This is the case
when the surface is asymmetric for tension and compression. For the symmetric
case, the shape in the region of AOB completes the whole diagram with its symmetry with respect to the origin.
240
13
Normality Rule for Plastic Deformation
Remark #13.7 Reference plastic strain increment
As a conjugate of the reference yield stress for the yield surface (and the effective
stress), there is the reference plastic strain increment (as a scalar quantity) for the
plastic strain increment surface (and the effective plastic strain increment), which
defines its size, based on the reference states. In incompressible, isotropic and
symmetric plasticity, for the reference stress state of simple tension (ST) and
compression (SC), balanced biaxial tension (BBT) and compression (BBC) and
pure shear (PS), their principal plastic strain increments become,
8 pST pST pST
pSC
pSC
pST
1 1
>
ðde ; deII ; deIII Þ ¼ ðdepSC
I ; deII ; deIII Þ ¼ deI ð1; 2 ; 2 Þ
>
> I
>
>
1 1
>
pBBC
>
ð ; ; 1Þ
< ðdepBBT
; depBBT
; depBBT
; depBBC
; depBBC
Þ ¼ depBBT
I
II
III Þ ¼ ðdeI
II
III
III
2 2
>
pPS2
>
>
ðdepPS2
; depPS2
; depPS2
ð1; 0; 1Þ
I
II
III Þ ¼ deI
>
>
>
>
: pPS3 pPS3 pPS3
ð1; 1; 0Þ
ðdeI ; deII ; deIII Þ ¼ depPS3
I
ð13:27Þ
These ratios are valid because, when the yield surface is smooth (without sharp
corners) unlike the Tresca yield surface, the normal direction at A and B are parallel
to OA and OB, respectively, by the geometric symmetry in the p diagram for the
isotropic and symmetric (for tension and compression) case in Fig. 12.3 (However,
the ratio for the simple tension deformation requires only isotropy and incompressibility in a strict sense). Here, two pure shear stress states lead to the plane
strain deformation, for which one of the principal plastic strain components
vanishes: the second component (PLS2) by PS2 and the third component (PLS3) by
PS3. Now, considering the plastic work equivalence principle in Eq. (13.4),
8 ST pST
pSC
r de ¼ rSC
¼ YdY
>
I deI
>
< I I
pBBT
de
¼ rBBC depBBT ¼ BdB
de ¼ rBBT
r
III
III
I
I
>
>
: PS2 pPS2
pPS3
¼ 2rPS3
¼ KdK
2rI deI
I deI
ð13:28Þ
where dY, dB and dK are the reference plastic strain increments and Y, B and K are
the reference stresses (as yield stresses) for the simple tension, balanced biaxial and
pure shear reference stress states, respectively. Therefore,
8
pSC pST
>
dY
¼
de
¼
de
>
I
I >
<
de ¼ dB ¼ depBBT ¼ depBBC
III
III
>
>
>
:
pPS2
dK ¼ 2deI
¼ 2depPS3
I
for
SC 8
Y ¼ rST
>
I ¼ rI
>
<
¼ B ¼ rBBT
r
¼ rBBC
I
I
>
>
:
K ¼ rPS2
¼ rPS3
I
I
ð13:29Þ
Moreover, since Y = B, dY = dB. Also, if Y ¼ B ¼ gK, dY ¼ dB ¼ dK=g.
13.4
13.4
von Mises Isotropic Plastic Strain Increment Function
241
von Mises Isotropic Plastic Strain Increment
Function
The von Mises yield surface, which is incompressible, isotropic and symmetric for
tension and compression, is a sphere in the eight-dimensional deviatoric space as
shown in Eq. (12.15). Therefore, the plastic strain increment is figuratively proportional to the deviatoric stress by the normality rule; i.e., depij ¼ ASij with a
proportional constant A. Then,
de ¼
ASij Sij ¼ Sij depij ¼ r
A 2
r
a
e
considering Eqs. (12.15) and (13.19). Therefore, A ¼ ad
r
so that
depij ¼ ade
Sij
r
ð13:30Þ
rde ¼ ade2 so that
Furthermore, since depij depij ¼ ASij depij ¼ A
rffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
1 p p
de de
de ¼
a ij ij
ð13:31Þ
with which the plastic strain increment surface is also a sphere in the deviatoric
space.
The same results can be algebraically obtained from Eq. (13.20), which is
applicable for a sphere as shown in Fig. 13.3a; i.e., Eq. (13.30) is directly obtaind
S S
from Eqs. (13.20) and (12.15). Then, depij depij ¼ a2 de2 rij 2 ij ¼ ade2 so that
Eq. (13.31) is obtained.
HW #13.1
Equation (13.30) leads to
Sij ¼ r
depij
ade
ð13:32Þ
Following the same procedures both figuratively and algebraically, derive
Eqs. (13.32)and (12.15) from Eq. (13.31) and the dual normality rule, Eq. (13.21).
HW #13.2
Derive Eqs. (13.30) and (13.31) from Eqs. (12.15) and (13.17), and also from
Eqs. (12.18) and (13.3). Confirm that symmetric shear components should be
handled separately in order to apply the normality rule.
HW #13.3
From Eq. (13.30), when the reference state is the simple tension,
242
13
(a)
(b)
(c)
(d)
Normality Rule for Plastic Deformation
Fig. 13.4 The four reference states in the p diagram: a simple tension b balanced biaxial c pure
shear (PS3) for plane strain (PLS3) d pure shear (PS2) for plane strain (PLS2)
0
1
0 2Y 1
0 1
0 1
1
1
depST
I
3
B pST C ade @ Y A
@ 1 A ¼ depST @ 1 A
¼
dY
@ deII A ¼
I
2
2
3
r
1
1
Y
depST
2
2
3
III
ð13:33Þ
¼ Y and de ¼ dY ¼ depST
with a ¼ 32, r
I , confirming Eqs. (13.27) and (13.29).
Also, Eq. (13.33) confirms Eq. (13.31). Perform the same for the reference stress
states, BB, PS2 and PS3 by properly applying their a values. The four reference
pffiffiffi
states are plotted in Fig. 13.4. Confirm in the figure that dY ¼ dB ¼ dK= 3.
HW #13.4
From Eq. (13.32), when the reference state is a simple tension state,
0
1
0
1
0 2 1
0 2 1
dY
SpST
I
3
3
r
B pST C
@ dY A ¼ r
A ¼ Y @ 1 A
@ 1
@ SII A ¼
2
3
3
ade dY
1
1
SpST
2
3
3
III
ð13:34Þ
13.4
von Mises Isotropic Plastic Strain Increment Function
243
¼ Y, confirming the deviatoric stress shown in Fig. 12.5.
with a ¼ 32, de ¼ dY and r
The Cauchy stress of the simple tesion under the plane stress condition is also confirmed by applying Eq. (13.22). Perform the same for the reference stress states, BB,
PS2 and PS3 by properly applying their a values.
13.5
Tresca Isotropic Plastic Strain Increment Function
The Tresca effective stress in Eq. (12.22) is replacable with the following Hosford
effective stress:
¼ faðjSI SII j þ jSII SIII j þ jSIII SI jÞg
r
ð13:35Þ
HW #13.5
Plot the p diagram for the Tresca yield surface by applying Eq. (13.35) and while
considering the stress distribution shown in Fig. 12.6. Also, derive that a ¼ 12 or
(a)
(b)
Fig. 13.5 The Tresca p diagrams of a the yield surface and b the plastic strain increment surface
Fig. 13.6 Multiple normal directions at a sharp corner of the Tresca p diagram obtained
considering a smooth curve converged to a sharp corner as its limit
244
13
Normality Rule for Plastic Deformation
a ¼ 14, respectively, when the reference state is a simple tension (and balanced
biaxial) state or a pure shear state.
The Tresca p diagrams of the yield surface and the plastic strain increment
surface are plotted based on the dual normality rules in Fig. 13.5. Note that there
are multiple normal directions at the corners, which are obtained by considering a
smooth curve that converges at each corner as its limit as shown in Fig. 13.6.
Therefore, plastic strain increments are not unique for the simple tension or balanced
biaxial stress states. Also, for the pure shear stress state, the plane strain deformation
is obtained, for which one of three plastic strain increment components vanishes.
However, there are multiple stress states for plane strain deformation from the simple
tension to the balanced biaxial. For the pure shear stress state, deformation of the
Tresca case and all incompressible, isotropic and symmetric yield functions
including the von Mises case is the same as plane strain deformation, even though
the stress state for the plane strain deformation is non-unique for the Tresca case.
The multiple plastic strain increments for the simple tension are
0
depST
depST
B I
¼@ 0
0
0
ð1 þ cÞdepST
I
0
1
0
C
A
0
pST
cdeI
ð13:36Þ
where 0:0 c 1:0 as shown in Fig. 13.7a. For c ¼ 0:5, deformation becomes
equivalent with that of simple tension for the smooth incompressible and isotropic
yield function. For c ¼ 0:0 and c ¼ 1:0, the deformation is the plane strain
deformation, which is also obtainable with the pure shear stress state as shown in
Fig. 13.7a. The figure confirms that
1
depST
¼ depPS
¼ dY ¼ dK
I
I
2
ð13:37Þ
which complies with Y = 2K, as confirmed by the plastic work equivalence
principle.
The multiple plastic strain increments for the balanced biaxial stress state are
(a)
(b)
Fig. 13.7 Multiple plastic strain increments a by the simple tension and b balanced biaxial stress
states
13.5
Tresca Isotropic Plastic Strain Increment Function
0
depBB
1
ð1 cÞdepBB
0
0
III
B
C
¼@
0
0
cdepBB
A
III
pBB 0
0
deIII 245
ð13:38Þ
where 0:0 c 1:0 as shown in Fig. 13.7b. For c ¼ 0:5, the deformation becomes
equivalent with that of the balanced biaxial state for the smooth incompressible and
isotropic yield function. For c ¼ 0:0 and c ¼ 1:0, the deformation is the plane strain
deformation, which is also obtainable with the pure shear stress state as shown in
Fig. 13.7a. The figure confirms that
pBB de ¼ depPS ¼ dB ¼ 1 dK
III
I
2
ð13:39Þ
Which complies with Y = B = 2K, as confirmed by the plastic work equivalence
principle.
HW #13.6
The conjugate Tresca effective plastic strain increment
The p diagram of the plastic strain increment surface shown in Fig. 13.5b implies
that the conjugate Tresca effective plastic strain increment is
de ¼ fbðjdeI j þ jdeII j þ jdeIII jÞg
ð13:40Þ
as the p diagram of Eq. (12.35) with M = 1.0 shown in Fig. 12.20 suggests.
Plot the p diagram of Eq. (13.40), which should be the same as that shown in
Fig. 12.20. Also, derive that b ¼ 12 for the simple tension and balanced biaxial
reference states and b ¼ 1:0 for the pure shear reference, considering Eqs. (13.36)
and (13.38).
HW #13.7
Plastic strain increments of Drucker and modified Drucker yield functions
For the Drucker and modified Drucker yield functions, their conjugate plastic
strain increment functions are not available for their analytical expressions.
However, considering the relationships shown in Eqs. (12.28) and (12.32) for the
Drucker and modified Drucker yield functions, derive the following relationships:
dK 6 ¼
272
272
dY 6 ¼
dB6
ð27 4nÞ
ð27 4nÞ
ð13:41Þ
dK 2 ¼
81
81
dY 2 ¼ 3
dB2
ð33 4nÞ
ð3 4nÞ
ð13:42Þ
and
246
13
Normality Rule for Plastic Deformation
for the Drucker and modified Drucker cases, respectively. Also, derive their principal components of the plastic strain increments.
13.6
Non-quadratic Isotropic Plastic Strain Increment
Functions Generalized from von Mises Plastic
Strain Increment Function
Non-quadratic isotropic yield functions shown in Eqs. (12.35) and (12.36) are
obtained by generalizing Eq. (12.34), which are the von Mises effective stresses
expressed with principal deviatoric stresses. Similarly, there are two expressions of
the von Mises effective plastic strain increment in terms of principal values, by
applying the relationship in Eq. (9.37) for deviatoric quantities:
8n o1
>
< b jdepI j2 þ jdepII j2 þ jdepIII j2 2
de ¼ n o1
>
: b jdep dep j2 þ jdep dep j2 þ jdep dep j2 2
I
II
II
III
III
I
ð13:43Þ
where b is a constant to be determined by considering the reference state. Then,
their non-quadratic versions extended from them are
n oM1
M
M
M
de ¼ b jdepI j þ jdepII j þ jdepIII j
ð13:44Þ
and
n oM1
M
M
M
de ¼ b jdepI depII j þ jdepII depIII j þ jdepIII depI j
ð13:45Þ
Remark #13.8 Hosford set, Inverse Hosford set, Tresca and Inverse Tresca
The set of Eqs. (12.36) and (13.44) are conjugates of each other when M = 2 and 4
for the von Mises case and also for the Tresca case with M = 1 (or infinity).
Therefore, considering that Eq. (12.36) is for the Hosford yield function, the set is
called the Hosford set here. The set of Eqs. (12.35) and (13.45) and the set of
Eqs. (12.36) and (13.44) exchange their principal deviatoric stresses and principal
deviatoric plastic strain increments so that the set of Eqs. (12.35) and (13.45) are
referred to as the inverse Hosford set here. The inverse Hosford set are conjugates
of each other when M = 2 and 4 for the von Mises case as well as when M = 1 (or
infinity), which is called the inverse Tresca case here, since the case is obtained
from the Tresca case by exchanging the principal deviatoric stresses with the
principal deviatoric plastic strain increments.
13.6
Non-quadratic Isotropic Plastic Strain Increment Functions …
247
HW #13.8
M
Derive for Eq. (13.44) that b ¼ 2 þ2 2M or b ¼ 2M1 , respectively, when the reference
state is simple tension (and balanced biaxial) or pure shear, while, dY ¼ dB ¼
1
ð1 þ 2M1 Þ M dK, considering Eqs. (13.27) and (13.29). Note that YdY = BdB =
KdK, regardless of the M value, considering the relationship between Y, B and K of
the Hosford yield function shown in HW #12.13. In fact, the Hosford set are
conjugates of each other for those reference states. Prove this, considering the dual
normality rules.
HW #13.9
M1
M
Derive for Eq. (13.45) that b ¼ 23M or b ¼ 2M2 þ 2, respectively, when the reference
state is simple tension (and balanced biaxial) or pure shear, while
M
1
dY ¼ dB ¼ ð1 þ32M1 Þ M dK, considering Eqs. (13.27) and (13.29). Note that YdY =
BdB = KdK, regardless of the M value, considering the relationship between
Y, B and K of the inverse Hosford yield function shown in HW #12.12. In fact, the
inverse Hosford set are conjugates of each other for those reference states. Prove
this, considering the dual normality rules.
The p diagrams of the Hosford set and the inverse Hosford set are plotted in
Figs. 13.8 and 13.9, respectively. These p diagrams are identical in shape but offset
by a 30° rotation. The effect of M value on these diagrams is the same as with that
of the Hosdford p diagram as previously explained with Fig. 12.19.
Remark #13.9 The Hosford and inverse Hosford sets are not conjugates of
each other except the von Mises, Tresca and inverse Tresca sets. However, their
yield functions (and their averaging of summation or linear combination) provide
diverse non-quadratic functions for incompressible, isotropic and symmetric
elasto-plasticity. Also, their plastic strain increment functions (and their averaging
of summation or linear combination) provide diverse non-quadratic functions for
incompressible, isotropic and symmetric rigid-plasticity.
Fig. 13.8 The p diagrams of the Hosford set and reference states: a yield surface and b plastic
strain increment surface
248
13
Normality Rule for Plastic Deformation
Fig. 13.9 The p diagrams of the inverse Hosford set and reference states: a yield surface and
b plastic strain increment surface
(a)
(b)
Fig. 13.10 The inverse Tresca p diagrams: a the yield surface and b the plastic strain increment
surface
The inverse Tresca p diagrams of the yield surface and the plastic strain
increment surface are plotted in Fig. 13.10. The results in HW #12.2 and HW
#13.9, suggest that Y = B = 3 K/2 and dY = dB = 2dK/3. Figure 13.10a confirms
the former of these two relationships. As for deformation, the plastic strain increment for simple tension is unique as but this deformation is obtainable by diverse
stress states between two pure shear stress states, (K, −K, 0) and (K, 0, −K).
Meanwhile, the plastic strain increment for a balanced biaxial state, is unique as
13.6
Non-quadratic Isotropic Plastic Strain Increment Functions …
249
pBBT 1 1
de
ð ; ; 1Þ ¼ dBð1 ; 1 ; 1Þ but this deformation is also obtainable by diverse
III
2 2
2 2
stress states between two pure shear stress states, (K, 0, −K) and (0, K, −K).
For the pure shear, (K, −K, 0), the following multiple plastic strain increments
are obtained:
02
depPS ¼
@
depPS
I
3 ð2
cÞ
0
0
0
2
3 ð1 cÞ
0
1
0
A
0
2
3 ð1 þ 2cÞ
ð13:46Þ
where 0:0 c 1:0 as shown in Fig. 13.11. For c ¼ 0:5, the deformation becomes
plane strain deformation, which is obtainable by pure shear for the smooth
incompressible, isotropic and symmetric yield function and also by the Tresca yield
1 1
function: depST
I ð1; 1; 0Þ ¼ dKð2 ; 2 ; 0Þ For c ¼ 0:0, the deformation becomes
1
1
1
1
1 2 1
pST 2 4 2
; Þ ¼ dKð ;
; Þ
depBB
I ð ; 1; Þ ¼ dBð ; 1; Þ ¼ deI ð ;
2
2
2
2
3 3 3
3 3 3
which is also obtainable with the simple tension stress state. For c ¼ 1:0, the
deformation becomes
depST
I ð1;
1 1
1 1
4 2 2
2 1 1
; Þ ¼ dYð1;
; Þ ¼ depST
; Þ ¼ dKð ;
; Þ
I ð ;
2 2
2 2
3 3 3
3 3 3
which is obtainable with the balanced biaxial stress state. Therefore,
dY = dB = 2dK/3.
13.7
Hill 1948 Effective Plastic Strain Increment
The Hill 1948 effective plastic strain increment, which is conjugate to its effective
stress defined in Eq. (12.37), becomes
Fig. 13.11 Multiple plastic
strain increments by the pure
shear stress state
250
13
de2 ¼ ðG þ HÞ
8 2
p 2
>
p 2
p
>
< F dexx þ G deyy þ H dezz
>
>
:
ðFG þ GH þ HFÞ
Normality Rule for Plastic Deformation
þ
2
2 depyz
L
2 9
>
p 2
p
=
2 dexy >
2 dezx
þ
þ
>
M
N
>
;
ð13:47Þ
HW #13.10
Algebraically derive Eq. (13.47) from Eq. (12.37). (Hint: The normality rule shown
in Eq. (13.3) provides two sets of three simultaneous linear equations, each for the
normal and shear components of the stress, respectively. Note that the three linear
equations for the normal components have a vanishing determinant because of the
incompressibility condition. Therefore, eliminate one normal component by
assuming that ryy ¼ arxx , for example, and solve for the two normal components
and three shear components of the stress. Substitute the solutions for the stress
components to Eq. (13.47) and organize the derivation considering the incompressibility condition, depyy ¼ ðdepxx þ depzz Þ.)
HW #13.11
Derive Eq. (12.37) from Eq. (13.47) based on the normality rule shown in
Eq. (13.21), following the same procedure discussed in HW #13.10. (Hint: Obtain
the result for deviatoric stress components and then convert it for stress
components.)
13.8
Drucker-Prager and Its Modified Compressible
and Isotropic Effective Plastic Strain Increment
The effective plastic strain increments of the compressible and isotropic effective
stresses, which are defined by Eqs. (12.38), (12.39) and (12.40), can be derived by
considering the figurative aspect of the normality rule shown in Eq. (13.3) and the
plastic work equivalence principle, which is
dwp ¼ rij depij ¼ Sij depij þ
de
¼r
pffiffiffiffiffiffiffi
1
ðrii Þðdepjj Þ ¼ ð 2J2 Þð
3
qffiffiffiffiffiffiffi
I1 ~I1
2~
J2 Þ þ ðpffiffiffiÞðpffiffiffiÞ ¼ x ~
x
3
3
ð13:48Þ
The three yield surfaces considered here are axisymmetric in the principal stress
space as shown in Figs. 12.24, 12.25 and 12.26 so that S and de are parallel to each
pffiffiffiffiffiffiffi pffiffiffiffiffiffiffi
pffiffiffiffiffiffiffi
other; therefore, Sij depij ¼ jSjjdep j ¼ ð 2J2 Þð 2J~2 Þ . Also, xT ¼ ðpI1ffiffi3 ; 2J2 Þ and
pffiffiffiffiffiffiffi
~
~xT ¼ ðpI1ffiffi3 ; 2~J2 Þ, which are vectors for the yield surface and the effective plastic
strain increment surface in their two-dimensional side views, respectively. Note that
13.8
Drucker-Prager and Its Modified Compressible and Isotropic Effective …
251
Fig. 13.12 a The Drucker-Prager yield surface when b is positive and b its conjugate surface in
the principal stress and plastic strain space and their two-dimensional side views in (c) and (d)
~xT is normal to the yield surface. For the Druker-Prager yield surface shown in
Fig. 13.12a, Eq. (12.38) leads to
x¼
I1ffiffi
p
3
ð
rbI1 Þ
pffiffi
a
!
;
pffiffiffi
~x ¼ A p3ffiffibffi
a
pffiffiffi
3b
¼ de pffiffiffi
a
ð13:49Þ
which are shown in Fig. 13.12c, d and de is the plastic strain increment of the
reference state. Recognizing the axi-symmetry of the yield surface, ~
x constructs the
pffiffiffi
effective plastic strain increment surface, which is a circle with a radius of ade,
pffiffiffi
parallel to but distanced by 3bde from the deviatoric plane along the hydrostatic
line, as shown in Fig. 13.12b. When b ¼ 0, the circle stays on the deviatoric plane
as the conjugate circle of the von Mises yield surface.
252
13
Normality Rule for Plastic Deformation
HW #13.12
A similar procedure leads to the construction of the effective plastic strain increment
surfaces for the yield surfaces defined in Eqs. (12.39) and (12.40), as shown in
Figs. 13.13 and 13.14. Derive these. Also, for the effective stress defined by
Eq. (12.40), its conjugate effective plastic strain increment becomes
sffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
~I 2
2~J2
de ¼
þ 1
a
9b
ð13:50Þ
Derive Eq. (13.50).
The yield surfaces defined in Eqs. (12.39) and (12.40) show an expansion in
volume for a positive hydrostatic stress and a contraction in volume for a negative
hydrostatic stress. The roles of the conjugate surfaces can be exchanged, if necessary, for Figs. 13.12, 13.13 and 13.14; i.e., if their surfces in (a) are the effective
plastic strain increment surfaces, then their (b) become the conjugate yield surfaces,
respectively.
Fig. 13.13 a The yield surface defined by Eq. (12.39) and b its conjugate surface in the principal
stress and plastic strain space and their two-dimensional side views in (c) and (d)
References
253
Fig. 13.14 a The yield surface defined by Eq. (12.40) and b its conjugate surface in the principal
stress and plastic strain spaces
References
Brünig, M., & Obercht, H. (1998). Finite elastic-plastic deformation behaviour of crystalline solids
based on a non-associated macroscopic flow rule. International Journal of Plasticity, 14, 1189–
1208.
Chung, K., & Richmond, O. (1986). A deformation based theory of plasticity based on minimum
work paths. Journal of Mechanics and Physics of Solids, 34, 511–523.
Dorn, J. E. (1949). Stress-strain relations for anisotropic plastic flow. Journal of Applied Physics,
20, 15.
Drucker, D. C., & Prager, W. (1952). Soil mechanics and plastic analysis or limit design.
Quarterly of Applied Mathematics, 10, 157–165
Hill, R. (1948). A theory of the yielding and plastic flow of anisotropic metals. In Proceedings of
the Royal Society of London (p. 281).
Hosford, W. (1972). A generalized isotropic yield criterion. Journal of Applied Mechanics, 39,
607–609.
Hosford, F., & Caddell, M. (2014). Metal forming: Mechanics and Metallurgy (4th ed.).
Cambridge: Cambridge University Press.
Jackson, L. R., Smith, K. F., & Lankford, W. T. (1948). Plastic flow of anisotropic metals.
Proceedings of the Royal Society of London A, 193, 281.
Tresca, H. (1864). Mémoire sur l’écoulement des corps solides soumis à de fortes pressions. C.R.
Acad. Sci. Paris, 59, 754.
Von-Mises, R. (1913). Mechanik der festen Körper im plastisch deformablen Zustand. Gött.
Nachr. Math. Phys Klasse, 1, 582–592
Chapter 14
Plane Stress State for Sheets
When plasticity is applied to thin sheets such as membranes, plates and shells, the
yield function and the plastic strain increment function as well as their applications
to the dual normality rules become simpler. Thin sheets are usually produced
through the rolling process and they deform under the plane stress condition. In
such a case, the materially embedded rectangular Cartesian coordinate system is
conveniently defined as shown in Fig. 14.1: the z (or 3-) direction is aligned with
the thickness direction, while x (or 1-) and y (or 2-) directions are on the plane of
the sheet, aligned with the rolling and transverse directions, respectively. Thin
sheets are assumed to be uniform with their through-thickness properties. Sheets
may be isotropic but are usually orthogonally anisotropic, for which the three axes
are the symmetry axes. Often, they are isotropic only on the x-y plane, a quality
referred to as planar isotropy (or equivalently normal anisotropy or throughthickness anisotropy).
The plane stress condition imposes the following two conditions:
0
r11
r ¼ @ r21
0
r12
r22
0
1
0
0A
0
ð14:1Þ
dep12
dep22
0
1
0
0 A
dep33
ð14:2Þ
and
0
depij
dep11
@
¼ dep21
0
In order to satisfy the conditions for the shear components to vanish based on the
dual normality rules, assume that
© Springer Nature Singapore Pte Ltd. 2018
K. Chung and M.-G. Lee, Basics of Continuum Plasticity,
https://doi.org/10.1007/978-981-10-8306-8_14
255
256
14
Fig. 14.1 Rectangular
Cartesian coordinate system
for sheets
Plane Stress State for Sheets
3, z (Thickness)
2, y (Transverse)
1, x (Rolling)
8
@
rð rij Þ
@
rð rij Þ
p
p
>
de
¼
d
e
¼
de
¼
d
e
>
13
23
@r13 r ¼0
@r23 r ¼0 ¼ 0
<
13
23
@deðdepij Þ
@deðdepij Þ
>
>
@dep p ¼ r23 ¼ r
@dep p ¼ 0
: r13 ¼ r
13
de13 ¼0
23
ð14:3Þ
de23 ¼0
Then, the nine-dimensional effective quantities can be scaled down to
five-dimensional quantities by imposing r13 ¼ r31 ¼ r23 ¼ r32 ¼ 0 and
dep13 ¼ dep31 ¼ dep23 ¼ dep32 ¼ 0, respectively.
Now, considering the condition that r33 ¼ 0, the non-vanishing components are
obtained as
8
@
r ðrij Þ
>
p
>
de
¼
d
e
>
> 11
>
@r11
<
@
r ðrij Þ
ð14:4Þ
p
de22 ¼ de
>
>
>
@r
22
>
>
: dep ¼ de @r ðrij Þ ¼ dep
12
21
@r12
where
¼ r
ðr11 ; r22 ; r12 ; r21 ; r33 ¼ r13 ¼ r31 ¼ r23 ¼ r32 ¼ 0Þ
r
ð14:5Þ
Here, the two symmetric shear components are treated separately in applying
Eq. (14.4) and
@
rðrij Þ
dep33 ¼ de
ð14:6Þ
@r 33
r33 ¼0
¼r
ðr11 ; r22 ; r33 ; r12 ; r21 ; r13 ¼ r31 ¼ r23 ¼ r32 ¼ 0Þ.
where r
As for its dual normality rule, consider first that
r33 ¼ r
@deðdepij Þ
¼0
@dep33
ð14:7Þ
which provides the relationship,
dep33 ¼ dep33 ðdep11 ; dep22 ; dep12 ; dep21 ; dep13 ¼ dep31 ¼ dep23 ¼ dep32 ¼ 0Þ
ð14:8Þ
14
Plane Stress State for Sheets
257
Then, for the non-vanishing components,
8
@de ðdepij Þ
>
¼
r
r
11
>
@dep11
>
<
@de ðdepij Þ
@dep
r22 ¼ r
>
22
>
>
@de ðdepij Þ
:r ¼ r
@dep ¼ r21
12
ð14:9Þ
12
where de is obtained from de by substituting dep33 with dep33 ðdep11 ; dep22 ; dep12 ; dep21 Þ;
i.e.,
de ¼ de ðdep11 ; dep22 ; dep33 ¼ dep33 ðdep11 ; dep22 ; dep12 ; dep21 Þ; dep12 ; dep21 ; dep13
¼ dep31 ¼ dep23 ¼ dep32 ¼ 0Þ
Therefore, Eqs. (14.4) and (14.9) are virtually three-dimensional, respectively.
For incompressible plasticity, the dual normality rules become simpler.
The effective stress, which is a function of the deviatoric stress, can be converted to
a function of the Cauchy stress by applying the definition of the deviatoric stress,
Eq. (9.30). Then, the effective stress represents a cylinder whose normal direction is
perpendicular to the deviatroic plane. Now, Eq. (14.4) is valid for the
non-vanishing components, while Eq. (14.6) is replaced by
dep33 ¼ ðdep11 þ dep22 Þ
ð14:10Þ
while considering the deviatoric nature of the normal components.
As for its dual normality rule, Eq. (14.9) is valid, for which de is obtained from
de by substituting dep33 applying Eq. (14.10); i.e.,
de ¼ de ðdep11 ; dep22 ; dep33 ð ¼ dep11 dep22 Þ; dep12 ; dep21 ; dep13
¼ dep31 ¼ dep23 ¼ dep32 ¼ 0Þ
ð14:11Þ
which leads to the condition, r33 ¼ 0, automatically, by the dual normality rule. To
prove the validity of Eqs. (14.9) under the condition of Eq. (14.10) for incompressible plasticity, applying Eq. (13.22) leads to
8
@deðdepij Þ
@deðdepij Þ
@deðdepij Þ
>
r
¼
r
þ
B
¼
r
r
p
p
>
11
@de11
@de11
@dep33
>
>
>
>
p
p
>
@deðde Þ
@deðde Þ
@deðdep Þ
>
>
@dep ij þ B ¼ r
@dep ij r
@dep ij
< r22 ¼ r
22
22
33
@deðdepij Þ
@deðdepij Þ
@deðdepij Þ
>
>
>
r
¼
r
þ
B
¼
r
r
¼0
p
p
33
>
@de33
@de33
@dep33
>
>
>
>
>
@deðdep Þ
:r ¼ r
@dep ij ¼ r21
12
12
ð14:12Þ
258
14
Plane Stress State for Sheets
HW #14.1
Confirm that Eq. (14.9) is equivalent with Eq. (14.12) by applying the chain rule
with Eq. (14.10).
In conclusion, for incompressible plasticity under the plane stress condition, the
plastic work equivalence principle becomes,
dwp ¼ r11 dep11 þ r22 dep22 þ r12 dep12 þ r21 dep21
ðr11 ; r22 ; r12 ; r21 Þde ðdep11 ; dep22 ; dep12 ; dep21 Þ
¼r
ð14:13Þ
with the dual normality rules of Eqs. (14.4) and (14.9), where the effective quantities are defined in Eqs. (14.5) and (14.11), along with the two added conditions of
Eq. (14.10) and r33 ¼ 0.
Remark #14.1 Yield and plastic strain increment surfaces in the plane stress state
The yield surface and the plastic strain increment surface may generally be considered to be three-dimensional for the plane stress state, regardless of
incompressibility.
(1) In the case of orthogonal anisotropy for typical sheets, the stress state in
yielding is symmetric to two axes as shown in Fig. 14.2a. While stresses at A
and B share the same principal states, a comparison of both on Mohr’s circle
shown in Fig. 14.2b, confirms that rA12 ¼ rB12 ; rA11 ¼ rB11 and rA22 ¼ rB22 ;
ðr11 ; r22 ; r12 Þ and the yield surface is symðr11 ; r22 ; r12 Þ ¼ r
therefore, r
metric with respect to the principal stress plane (with r12 ¼ 0).
(2) In the case of symmetry for tension and compression shown in Fig. 14.3,
ðr11 ; r22 ; r12 Þ ¼ r
ðr11 ; r22 ; r12 Þ and the yield surface is point symr
metric with respect to the origin.
(3) In the case of orthogonal anisotropy and symmetry, the yield surface is point
symmetric with respect to the origin and symmetric with respect to the principal
stress plane (with r12 ¼ 0). Therefore, the surface in the range of
r12 0; r22 ar11 , which is one quarter of the whole surface completes the
whole surface, the intersections may or may not have smooth surfaces as shown
in Fig. 14.4.
(a)
(b)
Fig. 14.2 a Top view of the sheet specimen shown in Fig. 14.1 including stresses for the case of
orthogonal anisotropy on the specimen and b on Mohr’s circle
14
Plane Stress State for Sheets
259
Fig. 14.3 a Stresses for the case of symmetry for tension and compression on the sheet specimen
and b on Mohr’s circle
(a)
(b)
(c)
(d)
Fig. 14.4 Top view of the yield surface for the case of orthogonal anisotropy and symmetry with
a sharp corners at intersections and b smooth intersections and side view with c sharp corners at
intersections and d smooth intersections
260
14
Plane Stress State for Sheets
(4) In the planar isotropic case (as a subset of orthogonal anisotropy), the effective
stress is only dependent on the values of the two principal stresses, which are
insensitive to exchanging r11 and r22 as well as to sign changes of r12 .
Therefore, the surface is symmetric with respect to the planes of r12 ¼ 0; r22 ¼
r11 as shown in Fig. 14.5. Furthermore, the nature of planar isotropy renders
that the yield curve on the principal stress plane (with r11 r22 ) is enough to
construct the whole surface.
Now, consider a specimen loaded with principal stresses of yielding, rI and rII ,
when it is aligned with the 1-axis (with h ¼ 0) and marked with ‘C’ in
Figs. 14.2a and 14.5c, d. When another specimen A is offset by a rotation of h
with the same loading, it also reaches the yield surface by planar isotropy
(whether the direction is clockwise or counterclockwise, it is not important for
sheets with orthogonal anisotropy). Then, when the components of these
principal stresses are expressed for the 1–2 coordinate system, the shear stress
develops and constructs a three-dimensional yield surface as shown in
Fig. 14.5c. The stress components are obtained from Mohr’s circle shown in
Fig. 14.5d, while obeying the two invariant conditions: its center position is
r11 þ r22 ¼ rI þ rII ¼ constant
(a)
(b)
(c)
(d)
ð14:14Þ
Fig. 14.5 Top view of the yield surface for the planar isotropic case with a sharp corners at
intersections, and b smooth intersection, c three-dimensional view and d Mohr’s circle (and
cross-sectional view)
14
Plane Stress State for Sheets
261
with its radius,
r r 2
r r 2
11
22
I
II
þ r212 ¼
¼ constant
2
2
ð14:15Þ
The normal components move along the line of Eq. (14.14) as h increases
towards D (in Fig. 14.5c), which is for h ¼ 45 with the maximum shear
component. Then, the distance q between ðr11 ; r22 Þ and ðr11 þ2 r22 ; r11 þ2 r22 Þ,
which are the positions of the normal stresses for A and D (in Fig. 14.5c),
22 2
q2 so
respectively, on the principal stress plane, becomes q2 ¼ 2ðr11 r
2 Þ ¼ 2~
that Eqs. (14.15) leads to
r r 2
q2
I
II
þ r212 ¼
¼ constant
2
2
ð14:16Þ
while in Mohr’s circle, Eq. (14.15), is
~2 þ r212 ¼
q
r r 2
I
II
¼ constant
2
ð14:17Þ
Therefore, the cross-section of the yield surface with the plane of Eq. (14.14) as
shown in Fig. 14.5c is an ellipse made from Mohr’s circle by stretching the
pffiffiffi
normal component axis 2 times as shown in Fig. 14.5d. Even though the
cross-section is an ellipse, the three-dimensional surface is an ellipsoid only for
the von Mises yield surface. The ellipse vanishes for the balanced biaxial
reference stress state.
(5) In the planar isotopic and symmetric case, the surface is symmetric with respect
to the planes of r12 ¼ 0; r22 ¼ r11 ; r22 ¼ r11 as shown in Fig. 14.6.
Because of its planar isotropy, however, the yield curve on the principal stress
plane in the range r12 0; r11 r22 ; r11 r22 , defines the whole surface.
(a)
(b)
Fig. 14.6 Top view of the yield surface for the planar isotropic and symmetric case with a sharp
corners at intersections and b smooth intersections
262
14
(a)
Plane Stress State for Sheets
(b)
Fig. 14.7 Four reference states on a the yield surface and b the plastic strain increment surface in
the plane stress state of incompressible, full isotropic and symmetric plasticity
As a subset of the planar isotropy, the discussion previously developed for
planar isotropy on its cross-sectional shape with the plane of Eq. (14.14) is
valid here. The maximum size of the ellipse is obtained for the pure shear
reference stress state with ðr11 ; r22 Þ ¼ ðK; KÞ, for which the maximum sizes
pffiffiffi
of r11 and q are K and 2K, respectively. The minimum size is for the
balanced biaxial reference stress state, whose size vanishes.
(6) In the planar isotopic and symmetric case with smooth intersections, r22 ¼
r11 with dep11 ¼ dep22 for any r12 and dep12 as well as r22 ¼ r11 with dep11 ¼
dep22 for any r12 and dep12 , while r12 ¼ 0 with dep12 ¼ 0 for any r11 and r22 .
Note that conclusions here are valid regardless of incompressibility and that they
are applicable to the effective plastic strain increment and its surface. In the case of
incompressibility, the p diagram shown in Fig. 12.3 confirms that, for the full
isotropic and incompressible case, the surface on the principal value plane in the
range of r12 ¼ 0; r11 r22 ; r11 0, defines the whole surface. Furthermore, for
the isotropic, symmetric and incompressible case, the surface on the principal value
plane in the range of r12 ¼ 0; r11 2r22 ; r11 0, defines the whole surface.
Remark #14.2 Reference states in the plane stress state
Considering Eqs. (13.27) and (13.29) for plasticity of incompressibility and full
isotropy and symmetry for tension and compression, their positions and the normal
directions of the four reference states are shown on smooth dual surfaces in
Fig. 14.7 for the plane stress state.
14.1
von Mises Conjugate Set
By following procedures to develop the effective stress for the plane stress state,
Eq. (12.18) for the von Mises yield function becomes
14.1
von Mises Conjugate Set
¼
r
263
qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
pffiffiffi
r211 r11 r22 þ r222 þ 3r212 ¼ Yð¼ B ¼ 3KÞ
ð14:18Þ
To plot Eq. (14.18) in the r11 r22 rectangular Cartesian coordinate system,
consider
3
1 02
r211 r11 r22 þ r222 ¼ constant ð¼ Y 2 3r212 Þ ¼ r02
11 þ r22
2
2
ð14:19Þ
with simple tension as the reference state as an example. Equation (14.19) is an
ellipse aligned along the new r011 r022 coordinate system. Finding the quadratic
form in the new coordinate system in Eq. (14.19) involves the application of the
theory on eigenvalue/eigenvector, which is critically instrumental to the theory of
principal values and directions for real symmetric tensors. These two applications
of the theory on eigenvalue/eigenvector are separate from their physical meanings
however, because of the similarities in the algebraic manipulation, the mathematical
procedure developed for the symmetric tensor, especially Mohr’s circle, is applicable here for two-dimensional applications.
To apply the theory on eigenvalue/eigenvector, modify the left side of
Eq. (14.19) into the following matrix form:
ð r11
1
r22 Þ
0
1
1
r11
r22
¼ ð r11
¼ ð r11
1 12
0
r22 Þ
þ 1
1
1
2
2
1 12
r11
r22 Þ
12 1
r22
12
0
r11
r22
Now, apply the theory on eigenvalue/eigenvector in Eq. (9.18) such that,
T 1
k
0
e1
e2 Þ 1
¼
1
T
0
k
e
2
2
2
!
!
1
1
1
1
pffiffi pffiffi
pffiffi pffiffi
3
0
2
2
2
2
2
1ffiffi p1ffiffi
p
p1ffiffi p1ffiffi
0 12
A ¼ ð e1 ;
¼
2
2
2
2
p1ffiffi
2
1ffiffi
p
2
p1ffiffi
2
p1ffiffi
2
12
1
therefore,
ð r11
1 1
r22 Þ
0 1
r11
r22
¼ ð r11
¼ ð r011
r22 Þ
r022 Þ
3
2
0
0
1
2
!
!
3
2
0
0
1
2
r011
r022
!
p1ffiffi
2
p1ffiffi
2
1ffiffi
p
2
p1ffiffi
2
!
r11
r22
3
1
þ r02
¼ r02
2 11 2 22
ð14:20Þ
where k1;2 and e*1,2 are two eigenvalues and two unit eigenvectors of the symmetric
matrix A. The two eigenvalues and eigenvectors are easily obtained from Mohr’s
264
14
Plane Stress State for Sheets
circle, assuming that A is a two-dimensional tensor. Therefore, Eq. (14.19)
becomes an ellipse as shown in Fig. 14.8 in the top view, which is an ellipsoid, as
expressed in Eq. (14.19) in the three-dimensional space.
Remark #14.3 Positive definiteness of the matrix
The procedure shown in Eq. (14.20) demonstrates how a quadratic form is derived
from the initial algebraic form utilizing the theory of eigen value/eigenvector. It also
shows that calculated results are always positive for any values of the two variables,
r011 and r022 (therefore, also for any values of r11 and r22 ), if the eigenvalues of the
initial matrix A are positive. Or inversely, if the calculated results of the initial
equation are positive for any values of initial variables, r11 and r22 , then the
eigenvalues of the matrix A are positive. The procedure and the results based on
Eq. (14.20) are applicable for the general n-dimensional case and, if the matrix (or
tensor) has all positive eigenvectors, then the matrix is known to be
positive-definite. If its eigenvalues are zero or positive, the matrix is
semi-positive-definite. For example, the elastic modulus C shown in Eq. (10.29),
when it is expressed in the matrix form, is positive-definite since the elastic
potential function is always positive for any elastic deformation. Strains for the
large deformation theory U, C(=U2), V and B(=V2) shown in Eqs. (11.23) are also
positive-definite.
HW #14.2
The yield surface is the cross-sectional shape of the cylinder aligned along the
hydrostatic line shown in Fig. 12.2 with respect to the plane of r33 ¼ 0. Confirm
that the plastic strain increment is
(a)
(b)
°
Fig. 14.8 The von Mises yield surface in the plane stress state a with various constant shear
components and b with four reference states (with the vanished shear component)
14.1
von Mises Conjugate Set
265
0
1 0
1
2r11 r22
dep11
B dep C B 2r22 r11 C
B 22
C B
C
@ dep A @ r11 r22 A
33
3r12
dep12
ð14:21Þ
by the normality rule in Eq. (14.4) and verify the four reference states with their
mutual directions shown in Fig. 14.8b.
As for the effective plastic strain increment, applying Eq. (14.11) for Eq. (13.31)
leads to
rffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
4 p2
dK
p
p
p2
de ¼
ðde þ dep2
22 þ de11 de22 þ de12 Þ ¼ dY ¼ dB ¼ pffiffiffi
3 11
3
ð14:22Þ
which becomes
3 2
3 p02 1 p02
p2
p
p
p2
dep2
11 þ de22 þ de11 de22 ¼ constantð¼ dY de12 Þ ¼ de11 þ de22
4
2
2
ð14:23Þ
This is an ellipse aligned along the new coordinate system shown in Fig. 14.9 in
the top view of the surface, which is an ellipsoid, as expressed in Eq. (14.23) in the
three-dimensional space. Equations (14.18) and (14.22) are the same except their
first or second normal components have the opposite signs so that the conjugate
surfaces are mirror images of each other with respect to the plane of r11 (or
dep11 ) = 0 and the plane of r22 (or dep22 ) = 0.
HW #14.3
Derive Eq. (14.23) for the new coordinate system, following the same procedure
applied for Eq. (14.19).
(a)
(b)
°
Fig. 14.9 The von Mises plastic strain increment surface in the plane stress state a with various
constant shear components and b with four reference states (with the vanished shear component)
266
HW #14.4
Confirm that
14
Plane Stress State for Sheets
1 0
1
r11
2dep11 þ dep22
@ r22 A @ dep þ 2dep A
11
22
r12
dep12
ð14:24Þ
0
by the normality rule in Eq. (14.9) and verify the four reference states with their
mutual directions shown in Fig. 14.9b.
14.2
Tresca Conjugate Set
HW #14.5
Derive the following Tresca effective stress in the plane stress state from Eq. (13.35):
¼
r
1
ðjrI rII j þ jrI j þ jrII jÞ
2
¼ Yð¼ B ¼ 2KÞ
ð14:25Þ
and plot the Tresca yield surface in the plane stress state with various constant shear
components and with four reference states (with the vanised shear component) as
shown in Fig. 14.10.
HW #14.6
Derive the following Tresca effective plastic strain increment in the plane stress
state from Eq. (13.40)
de ¼
(a)
1
ðjdeI j þ jdeII j þ jdeI þ deII jÞ
2
1
¼ dYð¼ dB ¼ dKÞ
2
ð14:26Þ
(b)
Fig. 14.10 The Tresca yield surface in the plane stress state a with various constant shear
components and b with four reference states (with the vanished shear component)
14.2
Tresca Conjugate Set
267
Furthermore, confirm the Tresca plastic strain increment surface in the plane
stress state with various constant shear components and with four reference states
(with the vanished shear component) as shown in Fig. 14.11. Equations (14.25) and
(14.26) are the same except that their first or second principal components have the
opposite signs so that the conjugate surfaces are mirror images of each other with
respect to rI (or depI ) = 0 and rII (or depII ) = 0 on the principal plane (with the
vanised shear components).
14.3
Inverse Tresca Conjugate Set
HW #14.7
Derive the following inverse Tresca effective stress in the plane stress state from
Eq. (12.35) with M = 1.0:
1
3
¼
ð14:27Þ
r
ðj2rI rII j þ j2rII rI j þ jrI þ rII jÞ ¼ Yð¼ B ¼ KÞ
4
2
Also confirm the Tresca yield surface in the plane stress state with various
constant shear components and with four reference states (with the vanished shear
component) as shown in Fig. 14.12.
HW #14.8
Derive the following inverse Tresca effective stress in the plane stress state from
Eq. (13.45) with M = 1.0:
1
de ¼
ðjdepI depII j þ j2depI þ depII j þ j2depII þ depI jÞ
3
ð14:28Þ
2
¼ dYð¼ dB ¼ dKÞ
3
(a)
(b)
Fig. 14.11 The Tresca plastic strain increment surface in the plane stress state a with various
constant shear components and b with four reference states (for the vanished shear component)
268
(a)
14
Plane Stress State for Sheets
(b)
Fig. 14.12 The inverse Tresca yield surface in the plane stress state a with various constant shear
components and b with four reference states (with the vanished shear component)
Also confirm the inverse Tresca plastic strain increment surface in the plane
stress state with various constant shear components and with four reference states
(with the vanished shear component) as shown in Fig. 14.13. The conjugate surfaces are mirror images of each other with respect to rI (or depI ) = 0 and rII (or
depII ) = 0 on the principal plane (with the vanished shear components).
14.4
Hosford and Inverse Hosford Sets
HW #14.9
Derive the following effective quantities of the Hosford set in the plane stress state
from Eqs. (12.36) and (13.44), respectively,
8
1
1
M
M
M
M
1
>
¼
r
r
þ
r
þ
r
¼ Yð¼ B ¼ ð1 þ 2M1 ÞM KÞ
r
j
j
j
j
j
j
I
II
I
II
>
2
>
>
M >
M1
<
2
p M
p M
M
de ¼
de
þ
de
þ
de
þ
de
j
j
j
j
j
j
I
II
I
II
2 þ 2M
>
>
>
>
1
1
>
:
¼ dY ¼ dB ¼ ð
ÞM dK
M1
1þ2
ð14:29Þ
Also, perform the dual normality rules for the principal components and confirm
the positions and normal directions of the four reference states shown in Fig. 14.14.
The yield and plastic strain increment surfaces are mirror images of each other with
respect to rI (or depI ) = 0 and rII (or depII ) = 0 on the principal plane (with the
vanised shear components).
14.4
Hosford and Inverse Hosford Sets
(a)
269
(b)
Fig. 14.13 The inverse Tresca plastic strain increment surface in the plane stress state a with
various constant shear components and b with four reference states (with the vanished shear
component)
(a)
σ II
(b)
d ε IIp
BB
PLS 2
BB
PS 2
PS 2
σI
ST
d ε Ip
PLS 2
PS 3
ST
PLS 3
PLS 3
PS 3
Fig. 14.14 The positions and normal directions of the four reference states a on the yield surfaces
and b the plastic strain increment surfaces of the Hosford set in the plane stress state
HW #14.10
Derive the following effective quantities of the inverse Hosford set in the plane
stress state from Eqs. (12.35) and (13.45), respectively,
8
n
oM1
1
M
>
<r
¼ 2 þ12M j2rI rII jM þ j2rII rI jM þ jrI þ rII jM
¼ Y ¼ B ¼ ð1 þ32M1 ÞM K
oM1
> n2M1 p
M1 1
M
M
M
:
de ¼ 3M jdeI depII j þ j2depI þ depII j þ j2depII þ depI j
¼ dY ¼ dB ¼ ð1 þ32M ÞM dK
ð14:30Þ
270
14
Plane Stress State for Sheets
Also, perform the dual normality rules for the principal components and confirm
the positions and normal directions of the four reference states shown in Fig. 14.15.
The yield and plastic strain increment surfaces are mirror images of each other with
respect to the respect to rI (or depI ) = 0 and rII (or depII ) = 0 on the principal plane
(with the vanised shear components).
HW #14.11
For the Drucker and modified Drucker effective stresses defined in Eqs. (12.30) and
(12.33), derive their effective stresses in the plane stress state and confirm their
yield surfaces with the four references shown in Figs. 12.13 and 12.17. Also, derive
their principal components of the plastic strain increments by the normality rule.
14.5
Hill 1948 Quadratic Anisotropic Conjugate Set
The effective stress and the effective plastic strain increment of the Hill 1948 set in
the plane stress state become
8
<r
2 ¼ H(rxx ryy Þ2 þ Fr2yy þ Gr2xx þ 2Nr2xy
n
p2
p
p
þ ðG þ HÞdep2
yy þ 2Hdexx deyy Þ
: de2 ¼ ðG þ HÞ ðF þ HÞdexx ðFG
þ
þ GH þ HFÞ
2dep2
xy
N
o
ð14:31Þ
Remark #14.4 R-value (or Lankford coefficient)
When metal sheets are isotropic (and incompressible as is typical for metals), the
1 1
plastic strain increment for the simple tension test has a ratio of depST
I ð1; 2 ; 2 Þ as
discussed with Eqs. (13.27) regardless of the loading direction. For anisotropic
sheets, such a ratio is invalid and the particular ratio between the second and third
(a)
(b)
σ II
d ε IIp
BB
PLS 2
BB
PS 2
PS 2
σI
ST
dε
PLS 2
p
I
PS 3
ST
PLS 3
PLS 3
PS 3
Fig. 14.15 The positions and normal directions of the four reference states a on the yield surfaces
and b the plastic strain increment surfaces of the inverse Hosford set in the plane stress state
14.5
Hill 1948 Quadratic Anisotropic Conjugate Set
271
components is considered important, which is called the R-value (or the Lankford
coefficient). This R-value changes depending on the loading direction of the simple
tension test for anisotropic sheets. More specifically, consider a test specimen
aligned with the new axis, x′, which is h from the rolling direction, x, as shown in
Fig. 14.2 (clockwise or counterclockwise is not important for sheets with orthogonal anisotropy). Under the plane stress condition, the plastic strain increment and
the simple tension stress become,
0
Yh
r0 ¼ @ 0
0
0
0
0
1
0 p
dex0 x0
0
0 A and dep0 ¼ @ depx0 y0
0
0
depx0 y0
depy0 y0
0
1
0
0 A
depzz
ð14:32Þ
Then, the R-value is defined as
Rh ¼
depy0 y0
depzz
ð14:33Þ
Note that the shear component, depx0 y0 , vanishes only when the loading direction
is aligned with the anisotropy symmetry axes, x- or y-axis. Considering
incompressibility,
0
1
ðRh þ 1Þ depx0 y0 =depzz 0
dep0 ¼ depzz @ depx0 y0 =depzz
Rh
0A
0
0
1
0
1
1
depx0 y0 =depx0 x0
0
p
Rh
B p
0 C
¼ depx0 x0 @ dex0 y0 =dex0 x0
A
ðRh þ 1Þ
1
0
0
ðRh þ 1Þ
ð14:34Þ
In the test, directly measuring the thickness strain increment, depzz , is difficult so
h
.
consequently, that the ratio, depx0 x0 =depy0 y0 , is measured, which is ðRR
h þ 1Þ
For simpler parameters to represent the degree of anisotropy, the following two
values are commonly applied:
R¼
R0 þ 2R45 þ R90
4
ð14:35Þ
which is the average R-value (or the normal R-value) and
Rp ¼
R0 2R45 þ R90
2
ð14:36Þ
which is the planar R-value.
For planar isotropy, the R-value is uniform and depx0 y0 ¼ 0 for any h. For isotropy, the R-value becomes 1.0.
272
14
Plane Stress State for Sheets
HW #14.12
Four anisotropic constants based on R-values
To determine the four anisotropic constants, four test results are required and the
most common method is to utilize three R-values, R0 ; R45 and R90 . When the
normality rule is applied for the effective stress, the following are obtained:
R0 ¼
¼
deyy H
dexx H
dey0 y0 12 dexx 2dexy þ deyy
¼ ; R90 ¼
¼ ; R45 ¼
¼
dezz G
dezz F
dezz
dezz
N
1
GþF 2
ð14:37Þ
As for the remaining condition, assume the effective stress is the simple tension
yield stress in the rolling direction. Then, G + H = 1. Therefore,
Ro
1
;G ¼
;
R90 ð1 þ Ro Þ
ð1 þ Ro Þ
Ro
ðR0 þ R90 Þð2R45 þ 1Þ
H¼
;N ¼
2R90 ð1 þ R0 Þ
ð1 þ R o Þ
F¼
ð14:38Þ
Verify Eqs. (14.37) and (14.38), by properly converting each simple tension
state to the stress state in the original x-y-z coordinate system. The results in
Eq. (14.38) are valid even for Eq. (12.37) for the three-dimensional case and, as for
the remaining two constants, when the von Mises condition is assumed for
pffiffiffi
through-thickness shear yield stress, Y ¼ 3K, L = M = 1.5.
HW #14.13
The yield surface of the Hill 1948 anisotropic yield function resembles that of
Fig. 14.5 as the case of orthogonal anisotropy and symmetry for tension and compression. Derive the relationships between the reference stress states, Y0 ; Y90 ; B0 ; K0
and between the reference plastic strain increments, dY0 ; dY90 ; dB0 ; dK0 with respect
to the three R-values, R0 ; R45 and R90 .
Remark #14.5 Hill 1948 planar isotropic conjugate set
To better understand the effect of the R-value on the yield surface, which plays an
important role in sheet metal forming, the planar isotropic Hill 1948 yield function
is considered here. Its conjugate surfaces resemble those shown in Fig. 14.6 as the
case of isotropy and symmetry for tension and compression. As such, they require
only the curves on the principal value plane (with the vanished shear component) in
the range of rI rII ; rI rII (or depI depII ; depI depII ) as shown in
Fig. 14.16. Its conjugate effective quantities are simplified as
8
2R
2ð1 þ 2RÞ 2
>
>
2 ¼ r2xx þ r2yy rxx ryy þ
rxy
<r
1
þ
R
1þR
2
ð1 þ RÞ
2R
2
>
p2
>
: de2 ¼
dep dep þ
dep2
dep2
xx þ deyy þ
1 þ R xx yy 1 þ R xy
1 þ 2R
ð14:39Þ
14.5
Hill 1948 Quadratic Anisotropic Conjugate Set
273
with
F¼
1
1
R
1 þ 2R
;G¼
;H¼
;N¼
1þR
1þR
1þR
1þR
ð14:40Þ
Note that the conjugate surfaces are mirror images of each other with respect to
rI (or depI ) = 0 and rII (or depII ) = 0 on the principal plane (with the vanised shear
components) as shown in Fig. 14.16b, c.
By the dual normality rules,
1
1 0
rxx 1 þR R ryy
depxx
C
R
@ depyy A B
@ 1 þ R rxx þ ryy A
2ð1 þ 2RÞ
depxy
rxy
ð14:41Þ
1
1 0 p
dexx þ 1 þR R depyy
rxx
C
@ ryy A B
@ 1 þR R depxx þ depyy A
1
p
rxy
1 þ R dexx
ð14:42Þ
0
1þR
and
0
which provide the component ratios for the reference states shown in Fig. 14.16.
For the plane strain condition (PLS2) with depyy ¼ 0 for Eqs. (14.41) and (14.42),
rPLS2
xx
rPLS2
yy
¼L
1
ð14:43Þ
R
1þR
þ 2RÞ 2
¼ L and dePLS2
¼ dL. Therefore, Y 2 ¼ ð1
L . Ultimately,
where rPLS2
xx
xx
ð1 þ RÞ2
8
< Y 2 ¼ 2 B2 ¼ 2ð1 þ 2RÞ K 2 ¼ ð1 þ 2RÞ2 L2
1þR
ð1 þ RÞ
ð1 þ RÞ
: dY 2 ¼ 1 þ R dB2 ¼ ð1 þ RÞ2ð1 þ 2RÞ dK 2 ¼ ð1 þ RÞ dL2
2
ð1 þ 2RÞ
2ð1 þ 2RÞ
2
ð14:44Þ
The case here is incompressible, symmetric for tension and compression and
planar isotropic. Additionally, it is not fully isotropic, so that among the conditions
for Y = B and the ratios of the reference plastic strain increment described in
Eq. (13.27), only two are satisfied. These are dBð1=2; 1=2; 1Þ for the balanced
biaxial stress state and dKð1=2; 1=2; 0Þ for the pure shear (PS3) stress state.
The Hill 1948 planar isotropic yield surfaces for various R-values are plotted in
Fig. 14.17. Note that, as the R-value increases, K decreases (for PS3) and L (for
PLS2) increases. This leads to improved drawability of (circular) metal cups,
meaning that deeper cups can be fabricated when metal sheets have larger R-values.
Also, as R-values increase, the position of PLS2 moves towards the position of BB,
which affects the formability of metal sheets, the capacity of metal sheets to deform
before breaking down during typical forming processes. These will be further
discussed in Chap. 17. Note that, when the R-value is larger than 1.0, B (for BB) is
274
14
(a)
Plane Stress State for Sheets
(b)
(c)
Fig. 14.16 a The positions of the four reference states and b their normal directions on the yield
surface and c on the plastic strain increment surface in the plane stresss state of the Hill 1948
planar isotropic conjugate set
larger than Y (for ST) and, when the R-value is smaller than 1.0, B (for BB) is
smaller than Y (for ST). However, there are many sheet metals which have larger B
than Y values with an R-value less than 1.0 as well as sheet metals which have
smaller B than Y values with an R-value larger than 1.0. Therefore, the Hill 1948
set is popularly used to describe metal sheets, however, it is certainly limited in
describing such behaviors known as anomalous.
14.6
Drucker-Prager and Its Modified Compressible
and Isotropic Conjugate Sets
For the Drucker-Prager compressible and isotropic set, its conjugate surfaces
resemble those shown in Fig. 14.5 as the case of isotropy so that they require only
the curves on the principal value plane in the range of rI rII (or depI depII ) as
14.6
Drucker-Prager and Its Modified Compressible and Isotropic Conjugate Sets
275
Fig. 14.17 The planar isotropic Hill 1948 yield surfaces for various R-values
shown in Fig. 14.18. Equation (12.38) has the first invariant term which does not
support symmetry for tension and compression. Its effective stress is simplified as
sffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
h
ffi
i
1 2
¼ 2a
r rxx ryy þ r2yy þ r2xy þ b rxx þ ryy
r
3 xx
ð14:45Þ
By the dual normality rule,
0
1 0
depxx
a
@ depyy A @ a
depxy
pffiffiffiffiffiffiffiffiffi 1
2rxx ryy þ p2aJ
ffiffiffiffiffiffiffiffiffi2 b
2ryy rxx þ 2aJ2 b A
2arxy
1
3
1
3
ð14:46Þ
which provides the component ratios for the twelve reference states defined in
Fig. 14.18a. For the plane strain condition (PLS2+) with depyy ¼ 0 for Eq. (14.46),
þ
rPLS2
xx þ
rPLS2
yy
¼
L0þ
1
pffiffiffiffiffiffiffiffiffiffiffi
2a3b2 3b
p
ffiffiffiffiffiffiffiffiffiffiffi2
2
!
2a3b
þ
þ
¼ L0þ and dePLS2
¼ dL0þ .
where rPLS2
xx
xx
Therefore,
Yoþ
¼
pffiffi
pffiffiffiffi 3pffiffi
2a þ 3b
pffiffiffiffiffiffiffiffiffiffiffi2 2 2a3b 3b
pffiffiffiffiffiffiffiffiffiffiffi
L0þ . Ultimately,
2
2a þ 3b
2
2a3b
ð14:47Þ
276
14
(a)
Plane Stress State for Sheets
(b)
(c)
Fig. 14.18 a The positions of the twelve reference states and b their normal directions on the
yield surface and c on the plastic strain increment surface in the plane stress state of the
Drucker-Prager sets (when b is positive)
14.6
Drucker-Prager and Its Modified Compressible and Isotropic Conjugate Sets
Y0þ
¼
Y90þ
dY0þ ¼ dY90þ
277
pffiffiffiffiffi
pffiffiffiffiffi
pffiffiffiffiffi
pffiffiffi
pffiffiffi
pffiffiffi
2a b 3 2a b 3 2a þ 2b 3 þ
pffiffiffi Y0 ¼ pffiffiffiffiffi
pffiffiffi Y90 ¼ pffiffiffiffiffi
pffiffiffi B
¼ pffiffiffiffiffi
2a þ b 3
2a þ b 3
2a þ b 3
pffiffiffiffiffi
pffiffiffi
2a 2b 3 pffiffiffiffiffi þ pffiffiffiffiffi pffiffiffi B ¼ 2aK ¼ 2aK
¼ pffiffiffiffiffi
2a þ b 3
!
pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
pffiffiffi
3
2a þ 3b 2a 3b2 3b2
pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
¼ pffiffiffiffiffi pffiffiffi
L0þ
2a þ 3b
2 2a 3b2
!
pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
pffiffiffi
3
2a 3b 2a 3b2 3b2 pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
¼ pffiffiffiffiffi pffiffiffi
L0
2a þ 3b
2 2a 3b2
!
pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
pffiffiffi
3
2a þ 3b 2a 3b2 3b2
þ
pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
¼ pffiffiffiffiffi pffiffiffi
L90
2
2a þ 3b
2 2a 3b
!
pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
pffiffiffi
3
2a 3b 2a 3b2 3b2 pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
L90
¼ pffiffiffiffiffi pffiffiffi
2a þ 3b
2 2a 3b2
pffiffiffiffiffi
pffiffiffiffiffi
pffiffiffiffiffi
pffiffiffi
pffiffiffi
pffiffiffi
2a þ b 3 2a þ b 3 2a þ b 3
pffiffiffi dY0 ¼ pffiffiffiffiffi
pffiffiffi dY90 ¼ pffiffiffiffiffi
pffiffiffi dB þ
¼ pffiffiffiffiffi
2a b 3
2a b 3
2a þ 2b 3
pffiffiffiffiffi
pffiffiffi
2a þ b 3
1
1
pffiffiffi dB ¼ pffiffiffiffiffi dK þ ¼ pffiffiffiffiffi dK ¼ pffiffiffiffiffi
2a 2b 3
2a
2a
!
pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
pffiffiffiffiffi pffiffiffi
2a þ 3b
2 2a 3b2
pffiffiffi
pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
¼
L0þ
2
2
3
2a þ 3b 2a 3b 3b
!
pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
pffiffiffiffiffi pffiffiffi
2a þ 3b
2 2a 3b2
pffiffiffi
pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
¼
L
0
3
2a 3b 2a 3b2 3b2
!
pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
pffiffiffiffiffi pffiffiffi
2a þ 3b
2 2a 3b2
þ
pffiffiffi
pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
¼
L90
3
2a þ 3b 2a 3b2 3b2
!
pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
pffiffiffiffiffi pffiffiffi
2a þ 3b
2 2a 3b2
pffiffiffi
pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
¼
L
90
2
2
3
2a 3b 2a 3b 3b
ð14:48Þ
The case here is isotropic but compressible and non-symmetric for tension and
compression so that, the conditions for Y = B and the ratios of the reference plastic
strain increment described in Eq. (13.27) are not satisfied because the ratios are
dependent on b. Ultimately, the ratios of plastic strain increment for the references
are:
278
14
Plane Stress State for Sheets
qffiffiffiffiffiffiffiffiffi
qffiffiffiffiffiffiffiffiffi
qffiffiffiffiffiffiffiffiffi
8
þ
þ
2
1
2
1
2
>
dY
¼
dY
a
a
a
þ
b;
þ
b;
þ
b
;
>
0
0
3
2
2
>
>
q
qffiffiffiffiffiffiffiffi
ffiffiffiffiffiffiffiffiffi3
ffi 3 qffiffiffiffiffiffiffiffiffi
>
>
2
1
2
1
2
>
>
> dY0 ¼ dY0 a 3 þ b; 2 a 3 þ b; 2 a 3 þ b
>
>
ffiffiffiffiffiffiffiffi
ffi
ffiffiffiffiffiffiffiffiffi
q
q
ffiffiffiffiffiffiffiffi
ffi
q
>
> þ
þ
1
2
2
1
2
>
dY
a
a
¼
dY
þ
b;
a
þ
b;
þ
b
;
>
90
90
>
2
3
>
qffiffiffiffiffiffiffiffi3ffi
q2ffiffiffiffiffiffiffiffiffi 3 qffiffiffiffiffiffiffiffiffi
>
>
>
1
>
¼ dY90
dY90
a 23 þ b; a 23 þ b; 12 a 23 þ b
>
2
>
>
ffiffiffiffiffiffiffiffiffi
q
qffiffiffiffiffiffiffiffiffi
qffiffiffiffiffiffiffiffiffi
>
>
> dB þ ¼ dB þ 1 a 2 þ b; 1 a 2 þ b; a 2 þ b ;
>
>
2
3
2
3
>
>
q3 ffiffiffiffiffiffiffiffiffi
qffiffiffiffiffiffiffiffi
ffi
qffiffiffiffiffiffiffiffiffi
>
>
>
1
2
1
2
2
>
< dB ¼ dB 2 a 3 þ b; 2 a 3 þ b; a 3 þ b
pffiffiffiffiffi
pffiffiffiffiffi
dK þ ¼ dK þ 12 2a þ b; 12 2a þ b; b ;
>
p
ffiffiffiffiffi
p
ffiffiffiffiffi
>
>
>
dK ¼ dK 12 2a þ b; 12 2a þ b; b >
>
pffiffiffiffiffiffiffiffiffiffiffi2
pffiffiffiffiffiffiffiffiffiffiffi
>
>
>
2a3b þ 3b
2a3b2 þ 3b
þ
þ
>
dL
¼
dL
;
0;
;
>
0
> 0
2
2
>
>
>
p
ffiffiffiffiffiffiffiffiffiffiffi
p
ffiffiffiffiffiffiffiffiffiffiffi
>
2
>
2a3b2 þ 3b
>
2a3b þ 3b
>
; 0;
dL
>
0 ¼ dL0
2
2
>
>
>
pffiffiffiffiffiffiffiffiffiffiffi
pffiffiffiffiffiffiffiffiffiffiffi2
>
>
2
>
2a3b þ 3b 2a3b þ 3b
þ
þ
>
>
dL
¼
dL
0;
;
;
90
90
>
2
2
>
>
>
p
ffiffiffiffiffiffiffiffiffiffiffi
p
ffiffiffiffiffiffiffiffiffiffiffi
>
>
2a3b2 þ 3b
2a3b2 þ 3b
>
: dL
;
90 ¼ dL90 0;
2
2
ð14:49Þ
HW #14.14
Based on the figurative aspect of the normality rule, construct the shape of the
plastic strain increment curve on the principal value plane as shown in Fig. 14.18c.
Note that the dual surfaces are mirror images of each other with respect to the plane
of rII (or depII ) = 0 with scale difference as shown in Fig. 14.18b, c.
As for the modified Drucker-Prager set described in Eq. (12.39), its dual surfaces
resemble those shown in Fig. 14.6. As an isotropic and symmetric case it requires
only the curves on the principal value plane in the range of rI rII ; rI rII
(or depI depII ; depI depII ) as shown in Fig. 14.19. Equation (12.39) has the first
invariant term which supports symmetry for tension and compression. Its effective
stress is simplified as
sffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
h
ffi
i
1 2
2
2
¼ 2a
rxx rxx ryy þ ryy þ rxy þ b rxx þ ryy r
3
ð14:50Þ
By the dual normality rule,
1 0a
depxx
@ depyy A B
@a
depxy
0
1
3
2rxx ryy
1
3
2ryy rxx
pffiffiffiffiffiffiffiffiffi
1
þ 2aJ2 b signðrxx Þ
C
pffiffiffiffiffiffiffiffiffi
þ 2aJ2 b sign ryy A
2arxy
ð14:51Þ
14.6
Drucker-Prager and Its Modified Compressible and Isotropic Conjugate Sets
Fig. 14.19 a The positions
of the four reference states
and b their normal directions
on the yield surface and c on
the plastic strain increment
surface in the plane stress
state of the modified
Drucker-Prager set described
by Eq. (12.39)
(a)
(b)
(c)
279
280
14
Plane Stress State for Sheets
which provides the component ratios for the four reference states defined in
Fig. 14.19a. For the plane strain condition (PLS2) with depyy ¼ 0 for Eq. (14.46),
rPLS2
xx
rPLS2
yy
1
pffiffiffiffiffiffiffiffiffiffiffi
2a3b2 3b
¼L
p
ffiffiffiffiffiffiffiffiffiffiffi2
2
!
ð14:52Þ
2a3b
¼ L and dePLS2
where rPLS2
xx
xx ¼ dL.
pffiffiffiffiffiffiffiffiffiffiffi
pffiffi
2a þ 3b 2a3b2 3b2
3
ffi pffiffi
pffiffiffiffiffiffiffiffiffiffiffi2
Therefore, Y ¼ pffiffiffi
L. Ultimately,
2a þ 3b
2
2a3b
8
pffiffiffiffiffiffiffiffiffiffiffi2 2 pffiffiffiffi
pffiffi
pffiffi
pffiffiffiffiffi
2a
þ
3b
2a3b 3b
>
2a
þ
2b
3
3
>
ffi pffiffi B ¼ 2aK ¼ pffiffiffiffi pffiffi
pffiffiffiffiffiffiffiffiffiffiffi
L
< Y ¼ pffiffiffi
2a þ b 3
2a þ 3b
2 2a3b2
p
ffiffiffiffiffiffiffiffiffiffiffi
pffiffiffiffi
pffiffi
pffiffiffiffi pffiffi
>
2 2a3b2
2a
>
ffi þ b p3ffiffi dB ¼ p1ffiffiffiffi dK ¼ 2apþffiffi 3b
pffiffiffiffiffiffiffiffiffiffiffi2 2 L
: dY ¼ pffiffiffi
3
2a þ 2b 3
2a
2a þ 3b
ð14:53Þ
2a3b 3b
The case here is isotropic and symmetric for tension and compression but
compressible so that, the conditions for Y = B and the ratios of the reference plastic
strain increment described in Eq. (13.27) are not satisfied because the ratios are
dependent on b. Ultimately, the ratios of plastic strain increment for the references
are:
8
qffiffiffiffiffiffiffiffiffi
qffiffiffiffiffiffiffiffiffi
qffiffiffiffiffiffiffiffiffi
2
1
2
1
>
>
dY
¼
dY
a
a
a 23 þ b
þ
b;
þ
b;
>
3
2
3
2
>
>
>
qffiffiffiffiffiffiffiffiffi
qffiffiffiffiffiffiffiffiffi
qffiffiffiffiffiffiffiffiffi
>
>
>
< dB ¼ dB 12 a 23 þ b; 12 a 23 þ b; a 23 þ b
pffiffiffiffiffi
pffiffiffiffiffi
>
>
dK ¼ dK 12 2a þ b; 12 2a þ b; b
>
>
>
pffiffiffiffiffiffiffiffiffiffiffi
pffiffiffiffiffiffiffiffiffiffiffi
>
>
>
2a3b2 þ 3b
2a3b2 þ 3b
>
; 0;
: dL ¼ dL
2
ð14:54Þ
2
HW #14.15
Based on the figurative aspect of the normality rule, construct the shape of the
plastic strain increment curve on the principal value plane as shown in Fig. 14.19c.
Note that the dual surfaces are mirror images of each other with respect to the plane
of rII (or depII ) = 0 with scale difference as shown in Fig. 14.19b, c.
In regards to the modified Drucker-Prager set described in Eq. (12.40), its dual
surfaces resemble those of Fig. 14.6 as the case of isotropy and symmetry for
tension and compression so that they require only the curves on the principal value
plane in the range of rI rII ; rI rII (or depI depII ; depI depII ) as shown in
Fig. 14.20. Equations (12.40) and (13.50) have the first invariant term which
supports symmetry for tension and compression. Its dual effective quantities are
simplified as
14.6
Drucker-Prager and Its Modified Compressible and Isotropic Conjugate Sets
ffi
rffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
8
h
i
2
>
1
2
2
2
>
¼ 2a 3 rxx rxx ryy þ ryy þ rxy þ b rxx þ ryy
<r
rffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
2
h
i
>
ðdepxx þ depyy Þ
>
p
p
p2
p2
: de ¼ 2 1 dep2
xx dexx deyy þ deyy þ dexy þ
a
3
281
ð14:55Þ
9b
Note that the dual surfaces are mirror images of each other with respect to the
plane of rII (or depII ) = 0 with scale difference as shown in Figs. 14.20b, c.
By the dual normality rules,
0 1
1
a 3 2rxx ryy þ b rxx þ ryy
depxx
B
@ depyy A B a 1 2ryy rxx þ b rxx þ ryy
3
@
depxy
2a rxy
0
and
1
C
C
A
h
i 2 dep þ dep 1
ð xx yy Þ
1
p
p
2de
de
þ
xx
yy
9b
B 3h
rxx
i 2 dep þ dep C
B
ð xx yy Þ C
C
@ ryy A B 2 1 dep þ 2dep
þ
C
Ba 3
xx
yy
9b
A
@
rxy
2
p2
de
xy
a
0
1
ð14:56Þ
0
2
a
ð14:57Þ
which provide the component ratios for the four reference states defined in
Fig. 14.20a. For the plane strain condition (PLS2) with depyy ¼ 0 for Eqs. (14.41)
and (14.42),
where
rPLS2
xx
¼ L and
dePLS2
xx
rPLS2
xx
rPLS2
yy
¼L
1
ð14:58Þ
a3b
2a þ 3b
¼ dL. Therefore, Y ¼
qffiffiffiffiffiffiffiffiffiffiffirffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
2
3
2
3
2a þ 3b
2a þ 12a b þ 18ab
ð2a þ 3bÞ2
L.
Ultimately,
8
qffiffiffiffiffiffiffiffiffiffiffiffiffi
qffiffiffiffiffiffiffiffiffiffiffi
qffiffiffiffiffiffiffiffiffiffiffirffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
>
2a þ 12b
2a3 þ 12a2 b þ 18ab2 2
6a
>
L
< Y ¼ 2a þ 3b B ¼ 2a þ 3bK ¼ 2a þ3 3b
ð2a þ 3bÞ2
r
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
ffiffiffiffiffiffiffiffiffiffiffi
q
q
ffiffiffiffiffiffiffiffiffiffiffi
qffiffiffiffiffiffiffiffiffiffiffiffiffi
>
ð2a þ 3bÞ2
2a þ 3b
2a þ 3b
2a þ 3b
>
: dY ¼ 2a
dL
3
þ 12bdB ¼
6a dK ¼
3
2a þ 12a2 b þ 18ab2
ð14:59Þ
The case here is isotropic and symmetric for tension and compression but
compressible so that, among the conditions for Y = B and the ratios of the reference
plastic strain increment described in Eq. (13.27), only one are satisfied. That is
dKða; a; 0Þ for the pure shear (PS) stress state. Ultimately, the ratios of the plastic
strain increment for the references are:
282
Fig. 14.20 a The positions
of the four reference states
and b their normal directions
on the yield surface and c on
the plastic strain increment
surface in the plane stresss
state of the modified
Drucker-Prager set described
in Eq. (12.40)
14
(a)
(b)
(c)
Plane Stress State for Sheets
14.6
Drucker-Prager and Its Modified Compressible and Isotropic Conjugate Sets
8
dY ¼ dY a 23 þ b; a 13 þ b; a
>
>
>
>
< dB ¼ dB a 1 þ 2b; a 1 þ 2b; a
3
3
> dK ¼ dK ða; a; 0Þ
>
>
>
:
dL ¼ dLða þ 6b; 0; a þ 3bÞ
1
3
2
3
283
þb
þ 2b
ð14:60Þ
Remark #14.6 Anisotropic non-quadratic yield functions
Recently, there have been active research efforts to develop orthogonal anisotropic
yield functions for sheet metals. Therefore, the main features of the anisotropic
yield functions are briefly summarized here. One of these key features is to modify
isotropic, incompressible and symmetric yield functions into orthogonally anisotropic, incompressible and symmetric yield functions by performing the linear
transformation for stress components. The second feature is to combine several
resulting anisotopic yield functions together. As for the original isotropic yield
functions, the non-quadratic yield functions such as the Drucker, Hosford and
Inverse Hosford yield functions, discussed in Sects. 12.6 and 12.7 are considered.
As for the general three-dimensional case, after combining, the anisotropic yield
function becomes either
M
f ¼ ð1 cÞ
rM
rM
1 þ c
2 ¼ r
ð14:61Þ
where, for a constant c, 0 c 1, or
f ¼
n
1X
M
M ¼ r
r
n m¼1 m
ð14:62Þ
where M = 6 for the Drucker effective stress if an example is considered. Here, the
m ¼ r
m ðe
m is either r
S I;II;III Þ or
m-th order anisotropic effective stress r
m ¼
m e
m ¼ r
J2; e
J 3 , when the original isotropic effective stress is either r
r
e
e
e
m ðSI;II;III Þ or r
m ¼ r
m ðJ2 ; J3 Þ, respectively. Note that S I;II;III and J 2 ; J 3 are the
r
principal deviatoric stresses and the second and third invariants of the deviatoric
stresses e
S are modified by the following linear transformation:
1
0
10
1
0
e
S xx
rxx
b m þ cm
cm
bm
0
0
0
C
Be
C
B cm
B
c m þ am
am
0
0
0 C
B S yy C
CB ryy C
B
Be C
C
C
B
1B
b
a
a
þ
b
0
0
0
r
B S zz C
m
m
m
m
CB zz C
Be C ¼ B
C
C
B
B
0
0
0
3g
0
0
r
B S xy C
3B
m
CB xy C
Be C
@ 0
0
0
0
3hm
0 A@ ryz A
@ S yz A
0
0
0
0
3km
rzx m
e
S zx
m
ð14:63Þ
where am, bm, cm, gm, hm and km are six anisotropic coefficients. With this linear
transformation, the convexity of the original isotropic yield function is preserved in
the anisotropic yield function.
284
14
Plane Stress State for Sheets
For the two-dimensional plane stress case, there are two approaches. One is to
apply the three-dimensional anisotropic yield function obtained in Eqs. (14.61) and
(14.62) for the plane stress condition, following the procedure discussed in this
chapter. The other approach is to develop the anisotropic yield function for the
two-dimensional isotropic yield function, following a similar procedure applied for
the three-dimensional case. For such a case, Eqs. (14.61) and (14.62) are applied
m ¼ r
m ð~
~yy ; r
~xy Þ, while the
where the m-th anisotropic effective stress is r
rxx ; r
m ¼ r
m ðrxx ; ryy ; rxy Þ. Here, r
~xx ; r
~yy ; r
~xy are
original isotropic effective stress is r
stresses modified by the following linear transformation:
0
1
0
~xx
r
am
@r
~yy A ¼ @ cm
~xy m
r
0
bm
dm
0
10
1
rxx
0
0 A@ ryy A
rxy m
gm
ð14:64Þ
Discussions here are to describe the main features of the anisotropic yield
functions and they are further modified from the ones shown here to optimize the
number of the anisotropic coeffecients in real anisotropic yield functions. Too many
coefficients are inconvenient to apply, while too few fail to sufficiently describe the
anisotropy. Also, there are efforts to develop anisotropic effective plastic strain
increments following a similar procedure discussed here.
To address the above-mentioned procedure for developing anisotropic
non-quadratic yield function, the isotropic Hosford and inverse Hosford yield
functions are considered here. Utilizing the feature of the anisotropic yield function
described above, the isotropic Hosford and inverse Hosford yield functions are
expanded to anisotropic functions by the linear transformation in Eq. (14.63),
which conserves the convexity:
M M M e
e
e
e
e
e
1 ¼
r
S I S II þ S II S III þ S III S I e M e M e M
2 ¼
r
S I þ S II þ S III 1
M
1
M
ð14:65Þ
ð14:66Þ
Then, the linearly transformed anisotropic yield functions can be combined
using the second feature. Among many different combinations, the followings are
commonly applied.
¼
r
M M e0 e0 M e0
0
S 0III þ e
S III e
S 0I S I S II þ S II e
1
M
þ
e00 M e00 M e000 M
S I þ S II þ S III 1
M
ð14:67Þ
14.6
Drucker-Prager and Its Modified Compressible and Isotropic Conjugate Sets
¼
r
n
M oM1
~S0 ~S0 M þ ~S0 ~S0 M þ ~S0 ~
S0I I
II
II
III
III
n
M M M oM1
þ ~S00I ~S00II þ ~S00II ~S00III þ ~S00III ~
S00I 285
ð14:68Þ
Figures 14.21 and 14.22 show the yield functions, variations of normalized yield
stresses and R-values along material orientation, which are obtained by applying
Eqs. (14.67) and (14.68), respectively, for HB780 (Hyper buring) steel.
Following the similar procedure as the anisotropic yield function, the anisotropic
effective plastic strain increments can be developed. A non-quadratic plastic strain
increment is defined in Eqs. (13.44) and (13.45) extended from Eq. (13.43). By
linear transformations, the plastic strain increments are obtained as
de ¼
de ¼
n
M
M
M
jdepI j þ jdepII j þ jdepIII j
oM1
n
oM1
M
M
M
jdepI depII j þ jdepII depIII j þ jdepIII depI j
ð14:69Þ
ð14:70Þ
(a)
(b)
(c)
Fig. 14.21 a Non-quadratic yield function with M = 8, b variation of the normalized uni-axial
yield stress and c R-value calculated from Eq. (14.67)
286
14
Plane Stress State for Sheets
(a)
(b)
(c)
Fig. 14.22 a Non-quadratic yield function with M = 6 b variation of the normalized uni-axial
yield stress and c R-value calculated from Eq. (14.68)
Moreover, the anisotropic effective plastic strain increment, which is a conjugate
to the yield function, can also be obtained using the second feature.
References
Hosford, F., & Caddell, M. (2014). Metal forming: Mechanics and metallurgy (4th ed.).
Cambridge: Cambridge University Press.
Hill, R. (1948). A theory of the yielding and plastic flow of anisotropic metals. In Proceedings of
the Royal Society of London, p. 281.
Chapter 15
Hardening Law for Evolution
of Yield Surface
In the past few decades, a few experimentations have been conducted to better
understand the evolution of the yield surface during plastic deformation.
Figure 15.1a shows experimental results measured by Phillips (1981) using a
hollow circular cylinderial specimen, for which a combined tension and torsion
were applied as shown in Fig. 15.1b. The initial circular yield surface at stage I in
the two-dimensional stress space severely changes its size and shape as well as its
position as it progresses to stages II, II and IV. As for the efforts to formulate such
changes, theses evolutions are significantly simplified and the yield surface is
assumed to expand without changes in shape or position as shown in Fig. 15.2,
which is known as isotropic hardening. Most current analysis and computations
are performed based on this assumption. Note that the isotropic hardening
assumption dos not properly account for the Bauschinger effect described in
Fig. 2.4. Even though there is a major discrepancy between the measured and
assumed yield surface evolutions, results based on such simplifications are proven
to be reasonably acceptable with a few exceptions. This is because plastic deformation in current research subjects including metal forming is more or less
monotonously proportional and does not drastically change its deformation mode;
therefore, it does not require the entire features of the yield surface evolution.
Another extreme approach to simplify the evolution of the yield surface is to
assume that the yield surface changes its position without changing its size or shape
as shown in Fig. 15.2, which is known as kinematic hardening. So far, efforts to
formulate the change in shape are very rare. By combining the isotropic and
kinematic hardening, the Bauschinger effect can be properly accounted for.
Formulating the isotropic hardening and the combined isotropic-kinemaic
hardening requires experimental measurements of the hardening of the yield stress.
An ideal experimental environment would be where both the stress and/or the strain
are proportional in the materially embedded coordinate system (such as deformation
with the minimum plastic work). Additionally, they are homogenous in a reasonably large area so that strain and stress can be conveniently measured.
Unfortunately, simple tension is the only viable option for providing such
© Springer Nature Singapore Pte Ltd. 2018
K. Chung and M.-G. Lee, Basics of Continuum Plasticity,
https://doi.org/10.1007/978-981-10-8306-8_15
287
288
15 Hardening Law for Evolution of Yield Surface
Fig. 15.1 a The evolution of the yield surface under combined tension and torsion loading using
b a hollow circular cylindrical specimen (*Ref. Phillips 1981)
conditions; therefore, the simple tension test is the most common tool to measure
hardening and simple tension is the reference state for most of formulations.
The procedure for collecting effective stress and strain data in a simple tension
test is illustrated in Fig. 15.3. As discussed in Chap. 2, measured test data is
engineering data as shown in Fig. 15.3a. This is converted to true stress and strain
data following the procedure discussed in Chap. 2. Finally, the effective stress and
strain data is obtained by performing
¼ Rrt
r
t
eð¼ deÞ ¼ et rE
ð15:1Þ
where rt and et are true stress and true strain, respectively. Effective data is often
analytically formulated as shown in Eqs. (2.17)–(2.20), along with strain-rate
sensitivity as shown in Eq. (3.6).
HW #15.1
The strain-rate sensitivity exponent
The strain-rate sensitivity exponent, the m-value in Eq. (3.6), is obtained as
15
Hardening Law for Evolution of Yield Surface
289
Initial yield surface
Isotropic hardening
Kinematic hardening
Combined isotropic kinematic hardening
Fig. 15.2 Comparison of isotropic hardening, kinematic hardening and combined isotropickinematic hardening
Fig. 15.3 a The engineering stress and strain data, b true stress and strain data and c the effective
stress and strain data obtained from the simple tension test
290
15 Hardening Law for Evolution of Yield Surface
e;e
r
e;e0
r
m e; e ¼
eðeÞ
‘n ‘n
ð15:2Þ
e0 ðeÞ
Derive this. It is common practice to measure m-values for various strain rates
and then they are averaged as a constant value.
Remark #15.1 Hydraulic bulge test and shear test (for sheets)
Though not as common as the simple tension test, the hydraulic bulge and shear
tests are also performed to measure hardening as schematically shown in Fig. 15.4
(for sheet metals). In the hydraulic bulge test, deformation is intrinsically inhomogeneous and only at the top of the sheet specimen is deformation under the
balanced biaxial stress state. As such, extra care is required to properly measure
deformation, especially for thickness strain at the top. One important advantage of
this test is that the valid effective data is nearly twice that of the simple tension test,
which will be further discussed in Chap. 17. As for the shear test, it is performed as
a torsion test using a hollow cylindrical specimen as shown in Fig. 15.1b for a bulk
sample or as a shear test using the sheet specimen as schematically shown in
Fig. 15.4b. They are essentially simple shear tests so that their principal directions
of stress and deformation are fixed spatially but not materially as discussed in HW
#11.12. Consequently, it takes extra care to interpret the test results, which is not
directly comparable with the results of the simple tension or bulge test.
HW #15.2
Hardening data with reference state change
Because hardening data is measured mostly using the simple tension test, it is
common practice to consider the simple tension as the reference state for formulations. However, occasionally it is convenient to formulate based on a reference
state other than simple tension. If measured hardening data is not available for a
particular reference state, then hardening measurements from simple tension is
modified for the desired reference state considering the relationship between the
reference stress states and the reference plastic strain increments. For example,
when undergoing a change from simple tension to pure shear reference states, the
formulation for the von Mises yield stress with the simple tension reference state is
modified as
(a)
(b)
P
Fig. 15.4 Schematic view of a the hydraulic bulge test and b the shear test for sheet specimens
15
Hardening Law for Evolution of Yield Surface
rffiffiffiffiffiffiffiffiffiffiffiffiffi
rffiffiffiffiffiffiffiffiffiffiffiffiffi Z
!m
n 3
3
dY=dt m
e
n
¼
Sij Sij ¼ e Sij Sij ¼
!Y ¼
r
dY
2
2
ðdY=dtÞ0
e0
!
rffiffiffiffiffiffiffiffiffiffiffiffiffi
p
ffiffi
ffi
m
Z
pffiffiffi
3
1
dK= 3dt
pffiffiffi
Sij Sij ¼ ðpffiffiffi dKÞn
¼ 3K ¼
2
3
ðdK= 3dtÞ0
291
ð15:3Þ
pffiffiffi
pffiffiffi
considering that Y ¼ 3K and dY ¼ dK= 3. Therefore, the formulation based on
the pure shear becomes
rffiffiffiffiffiffiffiffiffiffiffiffiffi n !m
e
e
1
¼
Sij Sij ¼ pffiffiffi
r
2
3
e0
ð15:4Þ
Confirm this. The procedure employed here is generally applicable to other
cases.
15.1
Isotropic Hardening
In isotropic hardening, the initial yield surface expands without changes to its shape
or position as shown in Fig. 15.2. In the meantime, its change in size is described
by the effective stress and the effective strain data shown in Fig. 15.3c, along with
strain-rate sensitivity, which may be shown in Eq. (3.6). All the formulations
discussed in Part III are applicable for isotropic hardening virtually without any
modification.
15.2
Kinematic Hardening
The brief analysis covered in Chap. 5 suggests that the Bauschinger behavior
observed during reverse loading is attributed to heterogeneous microstructures such
as heterogeneous grain orientations in polycrystals and the distributions of second
phase particles and so on. Besides the Bauschinger behavior, another important
aspect during reverse loading is that the reverse loading curve eventually converges
towards the curve of isotropic hardening (at ⑨ in the analysis in Chap. 5), which
also approximately complies with experimental measurements. The curve between
the reverse yield point (at ⑧) and the point joining the isotropic hardening curve
(at ⑨) is called transient behavior. By properly combining the kinematic hardening (to account for change in position change) with the isotropic (accounting for
the change in size of the yield surface), the Bauschinger and transient behaviors
should be properly accounted for.
292
15 Hardening Law for Evolution of Yield Surface
As for the formulation for the combined isotropic-kinematic hardening, the
expression of the yield surface is modified as
ðr aÞ = constant
f ðr aÞ ¼ constant or r
ð15:5Þ
by adding the center position of the yield surface, a, known as the backstress tensor
shown in Fig. 15.5 to the original expression. With the following plastic work
equivalence principle modified for the isotropic-kinematic hardening,
dwp ¼ trððr aÞdep Þ ¼ ðr aÞ dep ¼ ðrij aij Þdepij
ðr aÞdeðdep Þ ¼ constant
¼r
ð15:6Þ
The dual normality rules become
dep ¼ de
@
rðr a)
@ðr a)
ð15:7Þ
@deðdep Þ
@ ðdep Þ
ð15:8Þ
and
ra¼r
These formulations for the combined isotropic-kinematic hardening are obtained
from the original versions by replacing r with r a. The yield function including
the effective stress is newly defined as a function of r a from that of r. However,
there is no change in defining the plastic strain increment function and the effective
(a)
(b)
Fig. 15.5 Schematic view of a the yield surface and b the effective plastic strain increment
surface in the nine-dimensional space constructed by the modified plastic work equivalence
principle for the combined isotropic-kinematic hardening
15.2
Kinematic Hardening
293
plastic strain increment. The new formulations are extended in the same manner for
incompressible plasticity and also for the plane stress state plasticity.
As for separating the contributions of isotropic hardening and kinematic hardening from the overall hardening behavior, the reverse yield stress rC is experimentally measured for the reference state, which is typically simple tension as
shown in Fig. 15.6. Then, the center position of the yield stress is determined as
0
að¼ rO Þ ¼
rB þ rC
2
ð15:9Þ
where rB is the yield stress before reverse loading. Now, the data of
ð¼ rB aÞ collected within some interval of strain provides the data for the
R
ðeÞ ¼ r
ð deÞ.
size change of the yield stress as the isotropic hardening data r
Meanwhile, the remainder of the data represents the contributions of kinematic
hardening for the combined isotropic-kinematic hardening as shown in Fig. 15.6c.
In regards to formulating the backstress evolution, there are two early versions
rB rC
2
ð15:10Þ
da = c1 dep
known as the Prager type (1955) and
da ¼ c2
ðr aÞ p
de
ðr aÞ
r
ð15:11Þ
known as the Ziegler type (1959). The material parameter ‘ci’ are constants and
they are known for linear kinematic hardening. They are virtually equivalent to
each other for full three-dimensional applications when they are coupled with the
von Mises yield function. Because the movement of the yield surface in the
direction of the hydraulic line by the Ziegler type is not effective for incompressible
plasticity, Eq. (15.11) becomes
(a)
(b)
(c)
Fig. 15.6 Schematic view of the expansion and the position change of the yield surface a in the
stress space and b in the measured hardening data and c separation of the data to describe the size
and position change of the yield surface in the combined isotropic-kinematic hardening
294
15 Hardening Law for Evolution of Yield Surface
da ¼ c2
ðS aÞ
de
ðS aÞ
r
ð15:12Þ
while, for the von Mises case, S a dep .
The two types of formulations for linear kinematic hardening account for the
Bauschinger behavior. Nevertheless, they share the same drawbacks, which are
demonstrated here by applying them along with the von Mises yield function for
loading with simple tension and reverse loading shown in Fig. 15.7a. The first
minor drawback is the linear movement of the backstress as the center position of
the yield surface, which is unrealistic. However, this might be a reasonable
approximation for simplified analysis when combined with simplified hardening
behaviors shown in Fig. 2.17. A more serious limitation is that the reverse loading
curve never converges to the isotropic curve, therefore failing to properly account
for transient behavior, as the backstress follows the same trail during loading and
reverse loading as shown in Fig. 15.7a.
The following nonlinear kinematic hardening (1986) formulation overcomes
the drawbacks of the linear kinematic hardening formulation:
da ¼
c2
ðr aÞ
c3 a de
ðr aÞ
r
ð15:13Þ
which is based on the Ziegler type. Note that modified versions of Eq. (15.13) are
available. When Eq. (15.13) is applied to the reference state such as simple tension
under proportional loading, it becomes
da
þ c3 a ¼ c2
de
(a)
ð15:14Þ
(b)
Fig. 15.7 Loading with simple tension and reverse loading for a the linear kinematic hardening
without the transient behavior and b the nonlinear kinematic hardening with the transient behavior
15.2
Kinematic Hardening
295
ðdaÞ and a ¼ r
ðaÞ are the replacements of r a with da and a in the
where da ¼ r
¼r
ðr aÞ, respectively. Equation (15.14) is a first order inhoeffective stress, r
ðeÞ with the following solution:
mogeneous differential equation for r
a ¼
c2
ð1 expðc3eÞÞ
c3
ð15:15Þ
with the initial condition of aðe ¼ 0Þ ¼ 0. For the simple tension reference state,
this is
c2
ax ¼ ð1 expðc3 ex ÞÞ:
ð15:16Þ
c3
Curve fitting (using the least square method) for the measured data shown in
Fig. 15.6(c) by applying Eq. (15.16) determines the two constants, c2 and c3.
The performance of Eq. (15.13) is compared with that of the linear kinematic
hardening for the simple tension sequentially followed by compression in Fig. 15.7.
In Fig. 15.7b, the backstress evolves following Eq. (15.16) during initial loading
(from O to O′), which is nonlinear. Upon reverse loading, the backstress rapidly
decreases (from O′ to O″) unlike the linear kinematic hardening, following
ax ¼ ðax ðO0 Þ þ
c2
c2
Þ expðc3 ðex ex ðO0 ÞÞ c3
c3
ð15:17Þ
where ex \ex ðO0 Þ. The slope of the backstress for loading at O′ is
dax
dax
0
0
dex ¼ c2 c3 ax ðO Þ, while that for reverse loading at O′ is dex ¼ c2 c3 ax ðO Þ,
whose difference is −2c2. The backstress evolution after O″ resembles that between O
and O′. Figure 15.7b shows the transient behavior of the nonlinear kinematic hardening. One of the main applications of isotropic-kinematic hardening is the analysis
of springback in sheet metal forming, which will be further discussed in Chap. 17.
HW #15.3
Derive Eq. (15.17).
Remark #15.2 The combined isotropic-kinematic hardening formulation with two
yield surfaces
Combined isotropic-kinematic hardening is conveniently formulated using the two
yield surfaces, which share the same shapes, as schematically shown in Fig. 15.8.
The inner surface is the real yield surface and it is bounded by the outer surface.
Recognizing that the hardening curve converges with the isotropic hardening curve
after transient behavior upon reverse loading, the bounding surface here undergoes
isotropic hardening, while the inner surface moves and expands inside the bounding
surface. Upon reverse loading or unloading, the inner surface expands and moves
toward the bounding surface so that its movement and expansion describe transient
behavior until it touches upon the outer surface as schematically illustrated in
Fig. 15.8.
296
15 Hardening Law for Evolution of Yield Surface
(a)
(b)
Fig. 15.8 Schematic view of a the two yield surfaces and b their hardening behaviors for the
simple tension sequentially followed by compression
References
Chaboche, J. L. (1986). Time-independent constitutive theories for cyclic plasticity. International
Journal of Plasticity, 2, 149–188.
Phillips, A. (1981). Combined stress experiments in plasticity and viscoplasticity: The effects of
temperature and time. In E. H. Lee, R. L. Marllett (Eds.), Plasticity of metals at finite strain:
Theory, computation and experiment. Proceedings of Research Workshop held at Stanford
University, 230–252.
Prager, W. (1955). The theory of plasticity: A survey of recent achievements. Proceedings of the
Institution of Mechanical Engineers, 169, 41–57.
Ziegler, H. (1959). A modification of Prager’s hardening rule. Quarterly of Applied Mathematics,
17, 55–65.
Chapter 16
Stress Update Formulation
The constitutive law of plasticity consists of three elements: the yield surface
defined by the yield function to describe the elasticity limit, the normality rule to
define the directions of plastic deformation (for elasto-plasticity) or the stress (for
rigid-plasticity) and hardening behavior to describe the yield surface evolution
during plastic deformation. These three elements are combined here for
elasto-plastic and rigid-plastic formulations (based on the consistency condition).
To capture the main framework of the formulations, isotropic hardening with
strain-rate insensitivity is assumed here since the formulations are extended in a
rather straightforward manner for isotropic-kinematic hardening (Chung 1984) and
also to include strain-rate sensitivity based on the main framework described here.
As briefly explained in Chap. 14, elasto-plasticity is the standard formulation in
metal plasticity. And it is simplified to rigid-plasticity mainly for metal forming
analysis, in which the elastic deformation is ignored as its amount is significantly
smaller than the plastic deformation. Discussions in this chapter begin with
elasto-plasticity, which is then followed by rigid-plasticity.
16.1
Elasto-plasticity: Analytical Formulation
Plasticity is formulated based on the (natural) strain increment (both for
elasto-plasticity and rigid-on deformation history. In the analytical formulation of
elasto-plasticity, the elastic strain increment and the plastic strain increment are
typically assumed to be additive for the total strain increment as shown in Eq. (13.1):
de ¼ dee þ dep . As for the elastic strain increment,
dr ¼ Cdee ðdrij ¼ Cijkl deekl Þ
ð16:1Þ
which is the incremental form of linear elasticity shown in Eq. (1.30) with the same
constant elastic modulus tensor, C. Integrating this equation recovers Eq. (1.30) for
© Springer Nature Singapore Pte Ltd. 2018
K. Chung and M.-G. Lee, Basics of Continuum Plasticity,
https://doi.org/10.1007/978-981-10-8306-8_16
297
298
16 Stress Update Formulation
the infinitesimal theory in metal plasticity. This is one of hypo-elasticity, which is
applicable even for the finite deformation theory with some modifications as will be
discussed later in this chapter. Note that Eq. (16.1) is consistent in that the stress
increment and strain increment are both Eulerian (meaning that they are based on
the current configuration x(t), not the initial configuration, X). On the other hand,
the linear elasticity is conflicted, as the Eulerian stress tensor is equated with the
Lagrangian strain tensor as discussed in HW #11.1. As for the plastic deformation,
the normality rule based on the yield function (or the effective stress) shown in
Eq. (13.3) is applied.
Remark #16.1 Equation (13.1) is based on an assumption. However, there is a
more sophisticated version proposed by Lee (1969) based on mechanics:
F ¼ Fe Fp ð6¼ Fp Fe Þ
ð16:2Þ
where F, Fe and Fp are total, elastic and plastic deformation gradients, respectively,
as described in Fig. 16.1. Here, the configuration after the permanent plastic
deformation provides the fully unloaded reference state for the reversible elastic
deformation. Equations (13.1) and (16.2) become approximately equivalent under
certain conditions including the small elastic deformation (with Fe I). However,
Eq. (13.1) is commonly applied for most cases of continuum elasto-plasticity, while
Eq. (16.2) is more commonly used for crystal plasticity. As such, the formulation
here is based on Eq. (13.1).
The elasto-plastic formulation relates the total strain increment de (as an input) to
the stress increment dr (as an output). Note that the elastic strain increment is
always present and Eq. (16.1) is valid between dr and the elastic strain increment
dee throughout the entire deformation process, regardless of whether the plastic
deformation is involved or not. The first issue is then to determine when de ¼ dee
and when de ¼ dee þ dep . The second issue is determining the value of dep out of a
prescribed de for the latter
R case.
When the stress rð¼ drÞ is within the stress surface, de ¼ dee , until the stress
reaches the yield surface. Once the stress reaches the yield surface, there are two
possible choices for a given de; i.e., the stress may or may not be unloaded elastically. To determine the possible choice, assume de ¼ dee , while applying
Fig. 16.1 Multiplicative
elasto-plastic deformation
gradients for finite
deformation theory
σ
F=F e F p
Fe
Fp
ε
16.1
Elasto-plasticity: Analytical Formulation
299
Eq. (16.1) to obtain dr. Then, apply the following condition by comparing its
direction with the yield surface normal direction; i.e.,
r
r drð¼
@
r
\0 : elastic unloading
drij Þ
0 : without elastic unloading
@rij
ð16:3Þ
For elastic unloading, de ¼ dee and Eq. (16.1) is applied for dr. When there is
no elastic unloading, de ¼ dee or de ¼ dee þ dep . For the latter case, the normality
rule in Eq. (13.3) provides the direction of dep . As for its size, which is the effective
plastic strain increment, de, the following consistency condition is applied; i.e., the
stress should always stay on the yield surface when there is no elastic unloading,
ðrÞ ¼ r
h ðeÞ
r
ð16:4Þ
where the left side describes the position of the stress on the yield surface and the
right side is the size of the yield surface defined by the hardening curve shown in
Fig. 15.3. Then,
where
@
r
@
rh
ðr þ drÞ r
ðrÞÞ ¼
drð¼ d
r¼r
de hðeÞde
@r
@e
ð16:5Þ
@
r
dr ¼ Cdee ¼ Cðde dep Þ ¼ C de de
@r
ð16:6Þ
@
r
@
r
@
r
Cde ¼
C de þ hde
@r
@r
@r
ð16:7Þ
@
r
Cde
de ¼ @r @r @r
@r C @r þ h
ð16:8Þ
Therefore,
so that
Note that de in Eq. (16.8) is determined by a prescribed de and the hardening
slope, h, shown in Fig. 16.2, without requiring the effective plastic strain increment
to be explicitly defined for the plastic strain increment tensor.
Mechanical implications of the consistency condition are illustrated in Fig. 16.2.
For a prescribed de and the slope h, dep is determined by the normality rule (for its
direction) and Eq. (16.8) (for its size), then dr is determined by dee , which is
dee ¼ de dep , leading to the new stress position on the yield surface.
Furthermore, the new size of its yield surface obtained in the stress space matches
with the new position on the hardening curve, which changes with its slope, h.
300
16 Stress Update Formulation
(a)
(b)
d σ = hd ε
σ
dε
ε
Fig. 16.2 Derivation of the effective plastic strain increment based on the consistency condition
considering the new stress position a on the yield surface and b on the hardening curve
Remark #16.2 Analysis of Eq. (16.8)
(1) In this mathematical manipulation, it may be convenient to consider the
gradient and the increments of stress and strain in vector forms, while the
elastic modulus is in a matrix form.
r
@
r
(2) @
@r C @r [ 0, since the elastic modulus C is positive-definite as discussed in
Remark #14.3.
@
r
(3) Since de 0 and @r
Cde 0 by the second condition in Eq. (16.3),
@
r
@
r
h [ @r C @r.
(4) As h decreases for a given de, de (therefore, the size of the plastic strain
increment) increases as shown in Fig. 16.3. Simultaneously, dr moves toward
the yield surface, until h becomes zero, when dr stays on the tangential plane of
the yield surface. When h becomes negative, dr penetrates into the yield surface so that plastic unloading occurs (by the decrease in size of the yield
surface). The hardening slope is usually positive but may be negative when
some metals soften with the growth of micro-voids after large plastic
deformation.
r
(5) If @
e ¼ 0 and there is no change in the size of
@r Cde ¼ 0 for a given de, then d
the yield surface, regardless of the h value, so that de ¼ dee with dep ¼ 0.
Therefore, the following yield condition is obtained by slightly modifying
Eq. (16.3):
@
r
@
r
Cdeð¼
Cijkl dekl Þ
@r
@rij
0 : de ¼ dee
[ 0 : de ¼ dee þ dep
ð16:9Þ
r
e
@
r
Here, if @
@r Cde\0, de ¼ de because it is elastic unloading. If @r Cde 0, the
@
r
consistency condition and Eq. (16.8) are applied. Therefore, if @r Cde ¼ 0, then
@
r
de ¼ dee and, if @r
Cde [ 0, then de ¼ dee þ dep , by Eq. (16.8).
16.1
Elasto-plasticity: Analytical Formulation
301
Fig. 16.3 The effect of the hardening slope, h, on the the stress increment
(6) Note that, a particular (prescribed) value of de to satisfy the condition of
@
r
@r Cde ¼ 0 is insensitive to the h value. Now, assume that de moves outwards
thus incurring plastic deformation. Then, for h\0, dep grows rapidly such that
resulting dr moves inwards with plastic loading. For h ¼ 0, dep grows less
rapidly than the previous case such that the resulting dr stays on the tangential
plane of the yield surface, whose size does not change. For h [ 0, dep grows
slower than the previous two cases of the h value such that dr moves outwards
to match with the growth of the yield surface.
To complete the elasto-plastic formulation, for a given de, its plastic component
becomes
302
16 Stress Update Formulation
de ¼
p
!
Cde
@
r
@
r
@
r
@r
C
þ
h
@r
@r
@
r
@r
ð16:10Þ
The stress increment then becomes,
dr ¼ Cðde dep Þ
@
r
de
¼ C de @r
r
@
r @
@r Cde
¼ C de @
r
r
@r @r
C @
@r þ h
!
C @r @r C
de
¼ C @r @r @r@r
@r C @r þ h
Therefore,
dr ¼
!
ð16:11Þ
!
r
@
r
C @
@r @r C
C g @r
de
@
r
@r C @r þ h
ð16:12Þ
with g ¼ 0 for elasticity, g ¼ 1:0 for elasto-plasticity.
HW #16.1
Derive the following index notation form for Eq. (16.12):
drij ¼
16.2
Cijkl g
@
r @
r
Cijqr @r
Cstkl
qr @rst
@
r
Cmnop @r@rmn @r
þh
op
!
dekl
ð16:13Þ
Elasto-plasticity: Numerical Formulation
In solid mechanics, it is common to formulate the deformation of a material based
on the reference configuration, which is Lagrangian. In the numerical formulation
for plasticity (both for elasto-plasticity and rigid-plasticity), deformation is also
formulated based on the reference configuration, which is updated with the time
interval of Dt, and is therefore referred to as the updated Lagrangian formulation
(even though its algebraic formulation is Eulerian, based on the current configuration of the velocity distribution).
The numerical elasto-plastic formulation relates the discrete strain increment De
(as an input) to the discrete stress increment Dr (as an output). Such a formulation is
suitable for user defined subroutines, which some commercial finite element codes
provide to allow users to implement their own material properties. The discrete strain
increment De is the integration of the strain increment de over the time increment Dt,
16.2
Elasto-plasticity: Numerical Formulation
303
following an assumed deformation path during t0 t t0 þ Dtð¼ tf Þ. In this formulation, the proportional true strain deformation path for the minimal amount of
deformation (refer to Remark #11.4 for details) is assumed so that De is the discrete
true strain increment defined with Eqs. (11.48) and (11.49).
Now, De is assumed to be additively decomposed as
De ¼ Dee þ Dep
ð16:14Þ
where Dee and Dep are the elastic and plastic components of De, respectively. Here,
these two components are also assumed to be deformed following the proportional
true strain deformation path for the minimal amount of deformation such that each
has its own materially fixed principal directions and proportionally developing
principal values. Therefore, the amount of plastic deformation and the amount of
plastic work are guaranteed. Such a formulation is known as being derived from the
incremental deformation theory based on the minimum plastic work path (the
amount of elastic work is not minimal since it is not dependent on the deformation
history).
Now, Eq. (16.1) for the elastic part becomes
Dr ¼ CDee ðDrij ¼ Cijkl Deeij Þ
ð16:15Þ
P
Also, when the stress rð¼ DrÞ is within the stress surface, De ¼ Dee , until the
stress reaches the yield surface. Once the stress reaches the yield surface, the
criterion for the elastic and elasto-plastic deformation, Eq. (16.9), becomes
@
r
CDe
@r
0 : De ¼ Dee
[ 0 : De ¼ Dee þ Dep
or
ðe0 Þ
ðr0 þ CDeÞ r
r
0 : De ¼ Dee
[ 0 : De ¼ Dee þ Dep
ð16:16Þ
ð16:17Þ
for a prescribed De.
As for the discrete plastic strain increment, Eq. (13.3) becomes
Dep ¼ De
@
rðrÞ
@r
ð16:18Þ
Now, the discrete effective plastic strain increment, De, is obtained by applying
the consistency condition; i.e.,
ðr0 þ DrðDeÞÞ ¼ r
h ðe0 þ DeÞ
r
which is a nonlinear one-dimensional equation for De.
ð16:19Þ
304
16 Stress Update Formulation
Mechanical implications of Eq. (16.19) are illustrated in Fig. 16.4. Dep is
determined by the normality rule (for its direction) and the unknown quantity De
(for its size). The value of Dr determined by Dee , which is Dee ¼ DeDep , leads to
the new stress position on the yield surface and its new yield surface size. This new
size on the yield surface is on the left side of Eq. (16.19) as a function of De. The
right side is the new yield surface size on the hardening curve as a function of De.
The new yield surface sizes on the yield surface and on the hardening curve match
each other in Eq. (16.19). Even though Eq. (16.19) is nonlinear, it is
one-dimensional and has a unique solution as shown in Fig. 16.5 so that its
numerical solution does not take that much of computation.
Note that De in Eq. (16.19) is determined from a prescribed De and the hardening curve data (instead of its slope h) as shown in Fig. 16.5, without requiring the
effective plastic strain increment to be explicitly defined for the plastic strain
increment tensor. As for the slope, the secant slope is obtained as an output of the
calculation:
rh
~h ¼ D
De
ð16:20Þ
As for the normality rule, @r@rðrÞ may be considered at the stress state of r0 þ bDr,
for which it is the Euler forward and backward methods with b ¼ 0:0 and
b ¼ 1:0, respectively. For the implicit static FEM codes, De is a trial quantity for
the iterative solution scheme, unlike the case for the explicit static and dynamic
FEM codes. For the implicit FEM codes, the following tangent stiffness modulus is
required besides the formulation to obtain Dr for De:
Dr
¼
De
(a)
C @r @r C
C g @r @r @r@r
C þ~
h
@r
!
ð16:21Þ
@r
(b)
Fig. 16.4 Derivation of the discrete effective plastic strain increment based on the consistency
condition considering the new stress position a on the yield surface and b on the hardening curve
16.3
Rigid-Plasticity: Analytic Formulation
305
Fig. 16.5 The effect of the hardening slope, h, on the the stress increment
16.3
Rigid-Plasticity: Analytic Formulation
As shown in Fig. 15.1, when elastic deformation is removed from the measured
hardening data for rigid-plasticity, any amount of small initial deformation immediately incurs yielding and plastic deformation, which is unrealistic. Therefore,
rigid-plasticity is inappropriate for the infinitesimal theory and it is mainly for the
analysis of metal forming, in which plastic deformation is much larger compared to
the amount of elastic deformation. Even for metal forming, however, most
numerical codes are currently based on elasto-plasticity, since even a small amount
of elastic deformation plays a critical role in properly analyzing some phenomena,
306
16 Stress Update Formulation
Fig. 16.6 Stress is continuously updated in rigid-plasticity with its direction determined a by the
normality rule and with its size determined b by the hardening curve
which involve elastic unloading such as residual stress induced crack or springback.
Still, rigid-plasticity is useful for analytical solutions for metal forming, especially
coupled with perfect plasticity and the von Mises and Tresca yield functions. The
non-unique normal directions at sharp corners of the Tresca effective strain increment surface often provide a mathematical advantage in developing analytical
solutions. Rigid-plasticity is also useful for formulations such as the one-step
backward (design) code based on the ideal forming theory.
The rigid-plastic formulation relates the total stain increment de (as an input) to
the stress r (as an output). The normality rule based on the effective plastic strain
increment, Eq. (13.7), provides the formulation for rigid-plasticity:
ðe0 þ deðdep ÞÞ
r¼r
@deðdep Þ
@ ðdep Þ
ð16:22Þ
where dep ¼ de. The stress r is continuously updated every moment as shown in
Fig. 16.6, with its direction by Eq. (16.22), while its size is determined by the
effective stress, which is a function of the accumulated effective plastic strain, for
isotropic hardening, regardless of the h value. Therefore, any explicit expression of
the effective stress as a function of the stress tensor is not required and the stress is
updated without explicit calculation of dr. During the plastic deformation, there is
no change of the plastic strain increment surface with its size and shape. If de ¼ 0,
then de ¼ 0 and the stress is non-unique as shown in Fig. 16.7.
16.4
Rigid-Plasticity: Numerical Formulation
The numerical rigid-plastic formulation defines the relationship between the discrete strain increment De (as an input) and the stress r (as an output). In the
numerical formulation of rigid-plasticity, deformation is formulated based on the
reference configuration, which is updated with the time interval of Dt, making it an
updated Lagrangian formulation.
16.4
Rigid-Plasticity: Numerical Formulation
Fig. 16.7 Non-uniqueness of
the stress when there is no
further deformation in
rigid-plasticity
307
σ
h>0
h=0
h<0
ε0
ε
The discrete strain increment De is the integration of the strain increment de over
the time increment Dt, following an assumed deformation path during
t0 t t0 þ Dtð¼ tf Þ. In this formulation, the proportional true strain deformation
path for the minimal amount of deformation is assumed as done for the
elasto-plasticity formulation so that De is the discrete true strain increment defined
with Eqs. (11.48) and (11.49). Therefore, De has materially fixed principal directions and proportionally developing principal values. As such, the amount of plastic
deformation and the amount of plastic work for the isotropic hardening are guaranteed. Such a formulation is known as being derived from the incremental
deformation theory based on the minimum plastic work path.
Accordingly, the discrete effective plastic strain increment DeðDep Þ is obtained
from the effective plastic strain increment by replacing dep with Dep as
Z
Z
Z
_
_
¼ deðDep ðtf ÞÞ aðtÞdt
De ¼ deðdep Þ ¼ deðDep ðtf ÞÞaðtÞdt
¼ deðDep ðtf ÞÞ
ð16:23Þ
which is discussed in Remark #11.4. The normality rule, Eq. (16.22), becomes
ðe0 þ DeðDep ÞÞ
r¼r
@DeðDep Þ
@ ðDep Þ
ð16:24Þ
The stress r is updated with the interval of Dt as shown in Fig. 16.8, as well as with
its direction by Eq. (16.24) while its size is determined by the effective stress, which
is a function of the accumulated effective plastic strain, for isotropic hardening.
Therefore, any explicit expression of the effective stress as a function of the stress
tensor is not required and the stress is updated without explicit calculation of Dr.
Remark #16.3 A trick to overcome non-uniqueness
The non-uniquess of the stress when de ¼ 0 shown in Fig. 16.7 is not trivial and is
a major drawback of rigid-plasiticy, especially for sheet metal forming analysis. In
typical sheet metal forming, sheets are stretched and thinning occurs. Ultimately,
even though sheets harden during plastic deformation, thinning becomes more
dominant than hardening so that external force decreases just as in the simple
tension test discussed in Chap. 3. Then, as the one-dimensional slab model
308
16 Stress Update Formulation
Fig. 16.8 Stress is updated with the interval of Dt in rigid-plasticity with its direction determined
a by the normality rule and with its size determined b by the hardening curve
suggests, plastic deformation is localized at one critical material element (or in
reality, at the critical element and its neighboring elements because all elements are
connected three-dimensionally, unlike in the simple slab model), while all other
non-neighboring material elements are unloaded elastically. Such strain localization
accompanying a decrease in external loading eventually leads to the breakage of
sheets so that proper analysis of strain localization is important for sheet metal
forming analysis. Since this involves elastic unloading, elasto-plasticity can handle
it properly but rigid-plasticity can not because of the non-uniqueness. One easy fix
is to introduce a stiff linear line as shown in Fig. 16.9. Though it is not absolutely
accurate, the discrepancy between the elastic unloading and the strain localization
area is so small that the inaccuracies of this trick can generally be overlooked
without any major consequences.
Remark #16.4 One step inverse FEM code based on the ideal forming theory
The ideal forming theory was developed to design a process which would enable
the manufacture of a prescribed part with a specified metal sheet while consuming
the minimum amount of plastic work. In sheet metal forming, a final shape of a
particular metal sheet is prescribed, and the ideal forming theory provides the initial
sheet shape and its evolution from start to end under ideal conditions, which
involves the minimum amount of plastic work. Here, rigid-plasticity is applied and
the sheet is considered a membrane (without thickness). The hardening curve and
Fig. 16.9 A stiff linear line
introduced to avoid
non-uniqueness in
rigid-plasiticy
σ
ε0
ε
16.4
Rigid-Plasticity: Numerical Formulation
309
the effective plastic strain increment of the prescribed metal sheet are considered as
material properties. Then, the final configuration x is prescribed with the desired
shape of the final part. The initial configuration X, which is two-dimensional when
a flat sheet is assumed, is unknown. The solution procedure is that the distribution
of the true strain based on the minimum plastic work is calculated for an assumed
initial configuration. Then, the accumulated effective plastic strain is obtained by
replacing the plastic strain increment with the true strain, which is the same procedure employed in the rigid-plasticity formulation here. The total plastic work W
is then summed, which is a function of X = (X1, X2) distribution. To minimize the
total plastic work, perform
@W
¼0
ð16:25Þ
@X
which are nonlinear simultaneous equations. The solution provides the initial sheet
shape. The intermediate shapes between the initial to final shapes are further calculated, considering the condition that each true strain is proportional throughout
the process. The procedure provides the deformation theory based on the minimum plastic work path. An example solution is shown in Fig. 16.10. The ideal
forming solution does not match with the real forming solution in general since real
forming processes can not satisfy the minimum amount of plastic work. Also, this is
a solution for the purpose of process design, not for the purpose of process analysis.
However, the solution does not require as many calculations as an analysis solution.
As such, there are many one-step inverse commercial codes based on the ideal
forming theory that are available since they can provide a first approximation for
process analysis with quick calculations.
16.5
Finite Deformation Theory
The formulations to account for deformation in elasto-plasticity and rigid-plasticity
discussed so far are applicable for both infinitesimal and finite deformation theories.
However, for the finite deformation theory, the rigid body rotation of the material
element and its effect should also be properly managed. The procedure to account
for the rigid body rotation is performed in the global coordinate system since the
material element rotates in the global coordinate system (therefore, this procedure is
not included in the user defined subroutine, which takes care of the material
deformation in the material coordinate system).
To account for the rigid body rotation of a material element and its contribution,
first consider an arbitrary vector a on the rotating material. Then, in the global
coordinate system, this becomes
~a ¼ RðtÞa
ð16:26Þ
where R is the orthogonal tensor for the rotation of the material element. For the
time rate,
310
16 Stress Update Formulation
Fig. 16.10 An example solution of the ideal forming theory obtained for a prescribed final part
shape defined in (f), while (a) is the initial shape and the rest are the intermediate shapes between
the initial and the final (Chung and Richmond 1994)
_
a~_ ¼ RðtÞa_ þ RðtÞa
ð16:27Þ
a~_ ¼ a_ þ Wa
ð16:28Þ
which becomes
_ T,
considering Eq. (11.44) with U = I and U_ ¼ 0 for rigid body rotation, W ¼ RR
_
and also for the moment of R(t = 0) = I (but R 6¼ 0). Here, a_ is the changing rate of
a on the material and Wa is the rotation contribution, which is vertical to a, while ~
a_
is the total rate. However, with the condition that R = I, ~
a ¼ a in Eq. (16.26) so that
a_ ¼ a þ Wa
ð16:29Þ
16.5
Finite Deformation Theory
311
in which the changing rate of a on the material is newly denoted as a to avoid
confusion and a_ is the total rate. Here, the changing rate on the material a is
summed up with the rotation contribution to have the total rate.
Now, consider a tensor T on the rotating material. Then, this becomes, in the
global coordinate system,
~ ¼ RðtÞTRT ðtÞ
T
ð16:30Þ
from Eq. (11.42). For the time rate,
~_ ¼ RTR
_ T þ RTR
_ T þ RT R_ T ¼ T_ þ RT
_ þ T R_ T ¼ T_ þ WT TW
T
ð16:31Þ
following the same procedure performed for a vector. Here, T_ is the changing rate
~_ is the total
of T on the material and WT − TW is the rotation contribution, while T
~ ¼ T with R = I,
rate. Considering that T
T_ ¼ T þ WT TW
ð16:32Þ
When this is applied to the stress,
r_ ¼ r þ Wr rW
ð16:33Þ
_ is newly denoted as r to avoid
in which, the stress rate on the material, r,
confusion and it is called the Jaumann (or co-rotational) stress rate. The Jaumann
stress rate summed together with the rigid body contribution constructs the total
_ The Jaumann stress rate is the contribution of the material deforstress rate, r.
mation so that the stress increment in the hypo-elasticity in Eq. (16.1) (therefore,
that in Eq. (16.12) also) is the Juaumann stress increment, r dt, for its application
for the finite deformation in elasto-plasticity. Also, the backstress increments in
Eqs. (15.10)–(15.13) are the Jaumann stress increments for finite deformation
applications.
Now, the last concern for elasto-plasticity is that the Jaumann stress increment in
Eq. (16.12) is based on the material coordinate system, while the stress increment in
Eq. (16.33) is based on the global coordinate system. However, if the material
properties are isotropic, both in elasticity and plasticity, it is a common practice to
treat the material coordinate system as equivalent with the global coordinate sytem.
For such a case, the two Jaunmann stress rates are equivalent.
Here is a summary of the stress update procedure for isotropic elasto-plasticity.
In the current configuration based on the global coordinate system, there is the
velocity distribution v(x(t0), t = t0). To identify the material element, its position is
traced throughout the process as x(t0 + dt) = x(t0) + v(x(t0), t0)dt. With the velocity
distribution and its gradient, the rate of deformation tensor D and the spin tensor
W are obtained for a material element. Then, the strain increment Ddt is used to
calculate the Jaunmann stress increment r dt in Eq. (16.12), while W is used to
312
16 Stress Update Formulation
calculate the rigid body rotation contribution, Wrðt0 Þ rðt0 ÞW. Then, they are
added up to update the stress as
_ ¼ rðt0 Þ þ ðr ðt0 Þ þ Wrðt0 Þ rðt0 ÞWÞdt
rðt0 þ dtÞ ¼ rðt0 Þ þ rdt
ð16:34Þ
In the case of isotropic rigid-plasticity, the updated stress for t0 + dt contributed
by Ddt is obtained in Eq. (16.22) without explicit calculation of the Jaumann stress
increment; therefore, the stress in Eq. (16.22) is equivalent with rðt0 Þ þ r ðt0 Þdt in
Eq. (16.34). Therefore, Eq. (16.34) completes the stress update for rigid-plasticity
also when the stress in Eq. (16.22) replaces rðt0 Þ þ r ðt0 Þdt.
In an anisotropic elasto-plasticity case, the difference between the two Jaumann
stress increments should be properly handled. To do this, the rate of deformation
~ in Eq. (11.42)]
tensor, D, in the global coordinate system [which is denoted as D
should be converted to that of the material coordinate system first by utilizing
Eq. (11.42). If Eq. (11.42) is utilized,
~ 0Þ
D ¼ RT ðt0 ÞDRðt
ð16:35Þ
~ is for the global coordinate system and D is for the material coordinate
where D
system. Then, Ddt is applied to obtained the Jaumann stress increment in
Eq. (16.12), r dt. This increment is then converted to that in the global coordinate
system; i.e.,
~ dt ¼ Rðt0 Þðr dtÞRT ðt0 Þ
r
ð16:36Þ
~ is for the global coordinate
where r is for the material coordinate system and r
system, which is the one in Eq. (16.34) where it is written without the ‘tilda’. Here,
Rðt0 Þ is the rotation of the material element in the global coordinate system, which
is updated as
Rðt0 þ dtÞ ¼ ðWðt0 Þdt þ IÞRðt0 Þ
ð16:37Þ
As discussed in Remark #11.3, the unit base vectors in the material coordinate
system o ei¼1;2;3 are updated as
o
ei ðt0 þ dtÞð¼ Rðt0 þ dtÞei Þ ¼ o ei ðt0 Þ þ ðWðt0 ÞdtÞo ei ðt0 Þ
ð16:38Þ
where ei¼1;2;3 are the unit base vectors in the global coordinate system. Even for
isotropic sheets, at least the thickness direction should be updated in the global
coordinate system.
HW #16.2
As discussed in Remark #11.3, considering that o ei ðt0 Þ ¼ Rðt0 Þei in Eq. (16.38),
verify Eq. (16.37).
As for anisotropic rigid-plasticity, Eq. (16.35) is utilized to obtain the strain
increment in the material coordinate system, which is then applied to calculate the
16.5
Finite Deformation Theory
313
updated stress in Eq. (16.22). Then, the updated stress in the global coordinate
system is obtained as
~ ¼ Rðt0 ÞrRT ðt0 Þ
r
ð16:39Þ
~ is for the global coordinate
where r is for the material coordinate system and r
system, which replaces rðt0 Þ þ r ðt0 Þdt in Eq. (16.34) to complete the stress
update. The procedures to update the material rotation and the material coordinate
system are the same with those for elasto-plasticity.
In regards to the summary of the procedure for updating the numerical stress in
isotropic elasto-plasticity, there is the discrete displacement increment distribution,
Duðxðt0 Þ; t0 Þ, in the current configuration based on the global coordinate system. To
identify the material element, its position is traced throughout the process as
xðt0 þ DtÞ ¼ xðt0 Þ þ Duðxðt0 Þ; t0 Þ. With the discrete displacement increment distribution and its gradient, the orthogonal tensor DR and the right stretch tensor DU
are obtained for a material element (by following the procedure discussed in
Sect. 11.2). Then, the discrete true strain increment, De, is obtained as discussed in
Sect. 16.2, which is then used to calculate the discrete Jaunmann stress increment,
Dr, based on the consistency condition shown in Eq. (16.19). Finally, the stress is
updated as
rðt0 þ dtÞ ¼ DRðrðt0 Þ þ Drðt0 ÞÞDRT
ð16:40Þ
to account for the rotation of the material element.
As for isotropic rigid-plasticity, the updated stress contributed by deformation,
De, is obtained in Eq. (16.24) without explicit calculation of the discrete Jaumann
stress increment; therefore, the stress in Eq. (16.24) is equivalent with
rðt0 Þ þ Drðt0 Þ in Eq. (16.40). As such, Eq. (16.40) completes the stress update for
rigid-plasticity, when the stress in Eq. (16.24) replaces rðt0 Þ þ Drðt0 Þ.
In the case of anisotropic elasto-plasticity, the discrete strain increment, De,
should be converted from the global system to the material coordinate system by
utilizing Eq. (11.42). If Eq. (11.42) is utilized,
De ¼ RT ðt0 ÞD~eRðt0 Þ
ð16:41Þ
where D~e is for the global coordinate system and De is for the material coordinate
system. Then, De is applied to obtain the discrete Jaumann stress increment, Dr,
based on the consistency condition shown in Eq. (16.19). This increment is then
converted to that of the global coordinate system; i.e.,
D~
r ¼ Rðt0 ÞDrRT ðt0 Þ
ð16:42Þ
where Dr is for the material coordinate system and D~
r is for the global coordinate
system, which is equivalent to the one in Eq. (16.40) which does not have the
‘tilda’. Here, Rðt0 Þ is the rotation of the material element in the global coordinate
system, which is updated as
314
16 Stress Update Formulation
Rðt0 þ dtÞ ¼ DRðt0 ÞRðt0 Þ
ð16:43Þ
Considering discussions in Remark #11.3, the unit base vectors in the material
coordinate system o ei¼1;2;3 are updated as
o
ei ðt0 þ dtÞ ¼ Rðt0 þ dtÞei ¼ DRðt0 ÞRðt0 Þei
ð16:44Þ
where ei¼1;2;3 are the unit base vectors in the global coordinate system. Even for
isotropic sheets, at least their thickness direction should be updated in the global
coordinate system.
For anisotropic rigid-plasticity, Eq. (16.41) is utilized to calculate the strain
increment in the material coordinate system, which is then applied to calculate the
updated stress in Eq. (16.24). Then, the updated stress in the global coordinate
system is obtained as
~ ¼ Rðt0 ÞrRT ðt0 Þ
r
ð16:45Þ
~ is for the global coordinate
where r is for the material coordinate system and r
system, which replaces rðt0 Þ þ Drðt0 Þ in Eq. (16.40) to complete the stress update.
The procedures to update the material rotation and the material coordinate system
are the same as those for elasto-plasticity.
References
Chung, K. (1984). Ph.D. Dissertation, Stanford University, U.S.A.
Chung, K., & Richmond, O. (1994). The Mechanics of Ideal Forming. Journal of Applied
Mechanics, 61, 176–181.
Dunne, F., & Petrinic, N. (2005). Introduction to computational plasticity. Oxford University
Press.
Lee, E. H. (1969). Elastic-plastic deformation at finite strains. Journal of Applied Mechanics, 36,
1–6.
Simo, J. C., & Hughes, T. J. (2006). Computational inelasticity. Springer.
Chapter 17
Formability and Sprinback of Sheets
The main applications of metal plasticity include the process analysis and design of
metal forming, which broadly consists of sheet forming and bulk forming. During
the stamping process in sheet metal forming, sheets typically go through a drawing
operation, whose main features can be epitomized with the circular cup drawing
process schematically illustrated in Fig. 17.1.
In the cup drawing process, a flat blank sheet is positioned between the circular
hollow die and blank holder on which the blank holding force is applied to secure
the sheet as the punch moves down. If the force is too high, the sheet is stretched
too much without enough draw-in and torn down before the cup is completed as
shown in Fig. 17.2a. If the holding force is too low, the sheet wrinkles due to the
lack of a firm grip by the holder and the die. Therefore, the drawing process in sheet
forming generally has a process design or optimizing issue, since the proper amount
of blank holding force as well as the proper lubrication for friction control between
the various parts must be found in order to successfully produce a cup without
tearing or wrinkling. To optimize this process, a numerical analysis based on
continuum plasticity is performed iteratively.
Even though the ultimate objective for optimizing the process is to find the
proper process parameters such as the blank holding force and lubrication as well as
to select and arrange the proper process tools, the procedure by which process
optimization can be achieved requires proper material data. However, preparing
proper material data requires a good understanding of how certain material properties can affect the process as some sheets are easier than others to successfully
produce the desired final parts. The particular material property, which is associated
with withstanding breakage (tearing) in the typical sheet metal forming process
such as the drawing process, is broadly known as the formability of sheets and it is
briefly summarized here.
Remark #17.1 Coulomb friction law
The coulomb friction law is commonly applied to the analysis of the metal forming
process in order to describe frictional behavior. The essence of the law is illustrated
© Springer Nature Singapore Pte Ltd. 2018
K. Chung and M.-G. Lee, Basics of Continuum Plasticity,
https://doi.org/10.1007/978-981-10-8306-8_17
315
316
17 Formability and Sprinback of Sheets
(a)
Holding force
(b)
Punch
Holder
Blank
Die
Holder
Punch
Die
Blank
Die
Punch
Blank
Fig. 17.1 Schematic view of the circular cup drawing process a the cross-sectional side view of
the process and b shape evolution from the flat blank sheet to the final cup
(a)
(b)
Fig. 17.2 The design of the drawing process must avoid possible a tearing and b wrinkling
in Fig. 17.3, in which the normal force FN is applied and l is the Coulomb friction
coefficient. As the external force F increases from zero, the material does not move
initially and the frictional force f = F. The frictional force reaches its maximum
value lFN before it moves and this maximum value is maintained when the material
moves. Therefore,
F lFN : sticking condition
f ¼
ð17:1Þ
lFN : sliding condition
In principle, the breakage of sheets during forming operations would be determined by the fracture criterion (or limit), which is a type of mechanical property.
17
Formability and Sprinback of Sheets
317
FN
Fig. 17.3 The Coulomb
friction law
f
F
However, in most typical sheet forming processes at room temperature, sheets are
approximately subjected to the plane stress state with a moderate amount of gradual
bending. Then, sheets fail to deform after strain localization in the stretch (or
thinning) mode, which is quantified as the forming limit. This strain localization is
the result of the boundary value problem of the force equilibrium condition, which
is strongly affected by the following three mechanical properties of sheets: the
hardening behavior typically indicated by the n-value, strain-rate sensitivity typically indicated by the m-value and the shape of the yield surface. Ultimately,
breakage is the result of competition between the fracture limit, which directly
controls breakage, and the forming limit. For virtually all sheets with very few
exceptions, the fracture limit is so much larger than the forming limit that sheet fails
by strain localization. For such a case, measuring the fracture criterion become very
involved and, properly measuring the three mechanical properties becomes more
vital for properly evaluating breakage during forming operations.
There are several simple models that can be used to discuss the forming limit by
strain localization and its relationship with the three material properties. These are
based on rigid-plasticity since the small amount of elastic deformation generally
does not affect strain localization. These discussions are for sheets with yield surfaces, which are incompressible, planar isotropic and symmetric (for tension and
compression) under the plane stress condition while isotropic hardening is assumed.
As a result, Fig. 14.5 is applied here.
17.1
Dorn Criterion (1947)
As a two-dimensional extension of the Considère criterion (1885) discussed in
Chap. 3, the Dorn criterion is for the uniform deformation limit and the onset of
strain localization in the whole stretch modes, covering the pure shear (PS3) and
balanced biaxial stress (BB) states shown in Fig. 17.4, in which r22 ¼ ar11 and
@
r
@
r
ep22 ¼ bep11 (therefore, @r
¼ b @r
by the normality rule). Here, three material
22
11
elements are considered as a simple model as shown in Fig. 17.5. In Fig. 17.5a, it is
assumed that force is applied to each element such that the same stress states are
maintained at all three elements, but with a slightly larger stress value for Element
318
17 Formability and Sprinback of Sheets
Fig. 17.4 The stretch modes for sheets under the plane stress condition
(a)
(b)
Fig. 17.5 The simplified three elements model for a the Dorn criterion and b the Hill criterion
‘b’ by the force equilibrium along the direction of the 1-axis, which is the major
principal direction. However, their deformation is virtually uniform until the major
principal force reaches its maximum as is the case for the Considère criterion.
Therefore, the Dorn criterion imposes the maximum condition of the major principal force as the limit for the uniform deformation for all stretch modes.
Now,
dF1 ¼ dðr11 A1 Þ ¼ A1 dr11 þ r11 dA1 ¼ 0
ð17:2Þ
17.1
Dorn Criterion (1947)
319
so that
dr11
dA1
¼
¼ dep11
r11
A1
ð17:3Þ
by incompressibility. Further assume that the loading condition (therefore,
including deformation) is monotonously proportional or instantaneously proportional at the moment of the maximum condition; i.e.,
dr11 d
r
¼
r
r11
ð17:4Þ
which is valid since the ratio between the major principal stress and the effective
stress is maintained for isotropic hardening, regardless of the reference state
chosen, as confirmed in Fig. 17.6. When the normality rule is applied, Eq. (17.3)
becomes
d
r
@
r
¼r
de
@r11
ð17:5Þ
which is the Dorn criterion for the thinning mode (1 b 1). The right side of
Eq. (17.5) is the hardening law multiplied with the first component of the effective
stress gradient at a specified stress state. This is so that the deformation amount
which satisfies Eq. (17.5) is valid when it is expressed with the accumulative
effective strain, regardless of the deformation path as long as loading is instantaneously proportional at the moment of the maximum condition as confirmed in
Fig. 17.7.
(a)
(b)
Fig. 17.6 Schematic view of the same stress states at elements of the Dorn model for
a monotonously proportional loading and b non-proportional loading
320
17 Formability and Sprinback of Sheets
Fig. 17.7 The effective
forming limit strains of the
Dorn and Hill criteria
HW #17.1
¼ Ken , Eq. (17.5) leads to
For the Hollomon hardening law, r
ep11 ¼ ð¼ e
@
r
Þ¼n
@r11
ð17:6Þ
for monotonously proportional loading (and deformation) for the thinning mode
(1 b 1) as plotted in Fig. 17.8 for any yield function. Derive Eq. (17.6). Here,
@
r
ep11 ¼ e @r
only when deformation is monotonously proportional. Explain why.
11
(Hint: In Part III, when deformation is monotonously proportional then it usually
implies that W = 0 and deformation is in the minimum plastic work path.) Other
hardening laws give different expressions but Eq. (17.6) is the most simplistic such
that it is commonly stated that the n-value determines the uniform deformation
limit.
Fig. 17.8 Comparison of the
Dorn, Hill and M-K criteria
under monotonously
proportional deformation with
the Hollomon hardening law
(for the standard condition)
17.1
Dorn Criterion (1947)
321
HW #17.2
By Eq. (17.6), the valid effective data of the hydraulic bulge test (for BB) is twice
that of the simple tension test (for ST) for incompressible, fully isotropic and
symmetric metal sheets. Explain the reason for this.
If elements are free to slide along their interfaces as assumed here, Element ‘b’
alone would deform after the maximum force until it breaks down so that the Dorn
criterion was originally proposed as the fracture criterion. However, in real sheets,
elements are geometrically connected to each other (surrounding Element ‘b’) thus
interfering with the deformation of their neighboring elements. As such, Element
‘b’ deforms the most after the maximum force, but nearby neighbors deform
together. Nevertheless, this involves only very close neighbors so that deformation
is localized (without outright breakage) and the Dorn criterion is applied for the
homogeneous deformation limit or for the onset of strain localization. Strain
localization leads to a diffuse neck, especially for the simple tension test, which is
schematically illustrated in Fig. 17.9.
HW #17.3
Swift criterion (1952)
For the two-dimensional extension of the Considère criterion within thinning mode,
the Swift criterion is available aside from the Dorn criterion, which requires both
principal forces to be at their maximum simultaneously. However, such a condition
is over-constraint, except for ST, PS2 and BB, so that it is not realistic. Following a
similar procedure under similar assumptions, however, derive the following Swift
criterion:
d
r
¼
de
"
@
r
@r11
2
@
r
r11 þ
@r22
#
2
r22
ð17:7Þ
The Swift and Dorn criteria obtained for monotonously proportional loading
with the Hollomon hardening law are compared in Fig. 17.10.
1n
t
2
Diffuse
neck
Localized
neck
Fig. 17.9 Schematic view of progressive neck formation by strain localization in the simple
tension test
322
17 Formability and Sprinback of Sheets
Fig. 17.10 Comparison of the Dorn and Swift criteria under monotonously proportional loading
with the Hollomon hardening law
17.2
Hill Criterion (1952)
Strain localization ultimately leads to the termination of deformation, which is
remarked as the forming limit by strain localization. In the simple tension test, at the
moment of termination, a three-dimensional neck, known as the localized neck,
forms in a skewed direction as schematically shown in Fig. 17.9. The localized
neck penetrates through thickness, unlike the diffuse neck which mainly develops in
the width direction, and leads to outright breakage. Note that this forming limit is
not the fracture limit, which is usually much larger than the forming limit for most
sheets (unlike TWIP). However, the exact fracture limit does not play an important
role when termination occurs by strain localization, since further deformation after
the forming limit is only localized at the narrow localized neck area. The Hill model
provides a criterion to measure the forming limit.
The direction of the neck is aligned with the direction of the plane strain, with
deptt ¼ 0, for the newly introduced n-t coordinate system as shown in Figs. 17.9 and
17.5b. In Fig. 17.5b, it is assumed that force is applied to each element such that the
same stress states are maintained at all three elements, but with a slightly larger
stress value for Element ‘b’ by the force equilibrium along the direction of the
n-axis (while, the 1-direction is the major principal direction). To derive the
forming limit, the Hill criterion imposes the maximum force condition in the
n-direction, which is normal to the zero-extension direction (t-direction). Therefore,
dFn ¼ dðrnn An Þ ¼ An drnn þ rnn dAn ¼ 0
ð17:8Þ
17.2
Hill Criterion (1952)
323
which leads to
drnn
dAn
¼
¼ depnn ¼ dep11 þ dep22
rnn
An
ð17:9Þ
Then, considering incompressibility and the first invariant,
depnn þ deptn þ dep33 ¼ dep31 þ dep22 þ dep33
ð17:10Þ
and deptt ¼ 0. Further assume that the loading condition is monotonously proportional or instantaneously proportional at the moment of the maximum condition;
i.e.,
drnn d
r
¼
r
rnn
ð17:11Þ
as done for the Dorn criterion. When the normality rule is applied, Eq. (17.9)
becomes
d
r
@
r
@
r
@
r
¼r
þ
ð 1 þ bÞ
¼r
de
@r11 @r22
@r11
ð17:12Þ
which is the Hill criterion illustrated in Fig. 17.8 (for the standard condition which
will be discussed later). This is applicable only for 1 b 0, between the two
plane strain deformation modes (PLS3 and PLS), since the plane strain condition of
deptt ¼ 0 is not allowed between the plane strain deformation mode (PLS2) and
balanced biaxial stress states, 0\b 1:0, as demonstrated in Fig. 17.11. As for the
zero-stretching direction,
1
ep þ ep22
1 1 1 þ b
Þ 45
0 h ¼ cos1 ð p11
p Þ ¼ cos ð
2
2
1b
e11 e21
(a)
ð17:13Þ
(b)
Fig. 17.11 The condition of dep22 ¼ 0 is allowed only when a dep22 0 and not when b dep22 [ 0
324
17 Formability and Sprinback of Sheets
The amount of deformation which satisfies Eq. (17.12) is valid when it is
expressed with the accumulative effective strain, regardless of deformation path as
long as loading (and deformation) is instantaneously proportional at the moment of
the maximum force condition as confirmed in Fig. 17.7.
HW #17.4
Derive Eq. (17.13), considering Morh’s circle shown in Fig. 17.11.
HW #17.5
For monotonously proportional loading with the Hollomon hardening law,
Eq. (17.12) leads to
ep11 þ ep22 ¼ n
ð17:14Þ
as plotted in Fig. 17.8. Derive Eq. (17.14).
HW #17.6
Equation (17.13) is generally valid for any yield function and h ¼ 0 ; 45 ,
respectively, for the plane strain deformation (PLS2) and plane strain deformation
modes (PLS3). Confirm that, for the Hill 1948 planar isotropic yield function, the
angle for the simple tension is obtained from Eq. (17.13) with b ¼ 1 þR R, which
becomes h ¼ 35:26 for a fully isotropic case.
17.3
M-K (Marciniak-Kuczynski) Model (1967)
The Dorn and Hill models provide criteria for the onset of strain localization and the
forming limit by strain localization, respectively. However, the Hill criterion for the
forming limit is incomplete since it does not cover the entire thinning mode and also
because it only accounts for the effect of the n-value, and not those of other
properties. The M-K model overcomes such drawbacks of the Hill model by
slightly modifying the previous two models. As shown in Fig. 17.12, the M-K
model also involves only three elements. However, aside from the force equilibrium
condition at the interfaces of three elements, one more critical requirement is added
here, that is the geometric connectivity in the width direction: deatt ¼ debtt . To provide the difference in cross-sectional area, there is a difference in thickness between
Elements ‘a’ and ‘b’, which is dubbed as the defect size. One more modification is
that the interface between elements, which defines the t direction, may or may not
be vertical to the 1-axis, the major principal direction of stress and deformation.
With these minor modifications, the solution procedure requires numerical computation but the M-K model is much more useful in discussing the forming limit
than the two previous models.
In the M-K model, force is applied only to Element ‘a’ (with its major principal
direction aligned with the 1-axis) such that Element ‘a’ deforms but its prescribed
stretch deformation mode is maintained. The deformation of Element ‘b’ is driven
17.3
M-K (Marciniak-Kuczynski) Model (1967)
325
Fig. 17.12 Three elements for the M-K model
by the force equilibrium and geometric connectivity conditions at the interface.
Therefore, initially, deformation at Element ‘b’ is virtually the same as with that of
Element ‘a’. Yet, debnn [ deann because the thickness of Element ‘b’ is thinner as
shown in Fig. 17.13, while dea33 \deb33 under the condition deatt ¼ debtt (note that this
figure is particularly for the case when the interface between elements are vertical to
the 1-axis). Eventually, strain is localized at Element ‘b’ and debnn becomes dominant; i.e., deann ; debtt ð¼ deatt Þ debnn , with which Element ‘b’ deforms toward the
plane strain deformation mode (PLS2) with debtt 0, when relatively compared to
debnn . When Element ‘b’ nearly reaches the plane strain deformation mode (PLS2)
and also when debnn becomes dominant beyond the limit numerically prescribed,
computation is terminated. Then, the deformation at Element ‘a’ is collected as the
forming limit for the deformation condition prescribed at Element ‘a’.
To evaluate the effect of material properties on the forming limit, assume a
standard condition: the strain-rate insensitive Hollomon hardening law with an
n-value of 0.2 and the von Mises yield function accompanied by a vertical interface
direction with respect to the 1-axis, including the defect size of 0.999. Since the
forming limit is affected by the interface direction, the ultimate M-K forming limit,
which is the minimum value among all forming limits for all interface directions, is
considered. The forming limit curve obtained under this standard condition is
compared with the Dorn and Hill criteria obtained under the same conditions in
Fig. 17.8. While all three curves meet at the plane strain mode (PLS2), they all
differ from each other.
In Fig. 17.14, the M-K results obtained by applying various n-values under the
standard condition are plotted, which demonstrates improved forming limits with
larger n-values. This is because the larger n-value promotes more uniform deformation as suggested by the Dorn criterion. In Fig. 17.15, enhanced forming limits
with larger m-values are demonstrated. The larger m-value decreases the speed of
strain localization as discussed in Chap. 3.
326
17 Formability and Sprinback of Sheets
Fig. 17.13 Evolution of the deformation mode at Element ‘b’, which moves toward the plane
strain deformation mode (PLS2) during strain localization
To evaluate the yield surface effect, the Hosford yield function defined in
Eq. (14.29) with various M values (larger than M = 4, which is for the von Mises
yield function) is considered in Fig. 17.16. As the M value increases, the forming
limit decreases throughout the entire thinning mode. The reason for this is that, as
the M value increases, the yield surface becomes more flattened near the plane
strain mode (PLS2) as shown in Fig. 14.12 so that the area of the near plane strain
mode increases, thus promoting earlier termination by strain localization. The
R-value effect of the Hill 1948 planar isotropic yield function on the forming limit
is considered in Fig. 17.17. As the R-value increases, the area between the balanced
biaxial stress state and the plane strain deformation mode (PLS2) decreases as
shown in Fig. 14.17, which promotes earlier termination, while the area between
the two plane strain deformation modes (PLS2 and PLS3) increases, which slightly
improves the forming limit as confirmed in Fig. 17.17.
All of the results obtained so far are for cases in which the interface between
elements is vertical to the 1-axis. However, the direction of the interface significantly affects the value of the forming limit. As such, the minimum forming limit
with the proper interface direction is the ultimate forming limit value. Now, consider the rearrangement of the interface direction by h as shown in Fig. 17.12.
17.3
M-K (Marciniak-Kuczynski) Model (1967)
Fig. 17.14 The M-K criteria obtained with various n-values
Fig. 17.15 The M-K criteria obtained with various m-values
327
328
17 Formability and Sprinback of Sheets
Fig. 17.16 The M-K criteria obtained with various M values for the Hosford yield function
Fig. 17.17 The M-K criteria obtained with various R-values for the Hill 1948 planar isotropic
yield function
17.3
M-K (Marciniak-Kuczynski) Model (1967)
329
Then, for the new n-t coordinate system aligned with the new interface direction,
the yield surface at Element ‘b’ becomes as shown in Fig. 17.18, which provides an
overhead view of the three-dimensional surface. However, the shape of the yield
surface remains the same for any coordinate system in isotropic plasticity.
As for the stress state and the deformation mode prescribed at Element ‘a’,
(which is virtually the initial state at Element ‘b’), it has a new position by Mohr’s
circle and moves along the line of rnn þ rtt ¼ constant(=r11 þ r22 Þ, which is the
first invariant, as the interface direction h increases. The bold dotted line is the
schematic overhead view of the new positions of all stress states between PLS3 and
BB marked at the edge of the yield surface when h ¼ 0 . The line of rnn ¼ rtt with
h ¼ 45 is the line of the maximum shear stress component.
Now, consider the stress state for the plane strain deformation mode (PLS2) with
deptt ¼ 0 and depnt 6¼ 0, which is the ultimate termination point of strain localization
at Element ‘b’ when h 6¼ 0 . Its top view is the straight line OB in the figure and
Point ‘B’ is for principal stresses for h ¼ 0 with depnt ¼ 0, while Point ‘O’ is for
h ¼ 45 with the maximum non-zero depnt . This line shown in the figure is an
example case obtained for the von Mises yield function from the second equation of
Eq. (14.21), deptt ¼ 2rtt þ rnn ¼ 0, which is valid for any n-t coordinate system in
~ in
isotropic plasticity. In general, the line is not straight. The stress state point ‘A’
the figure, which is the intersection of Line OB and the bold dotted line for h ¼ hA ,
Fig. 17.18 Schematic view of the yield surface and the plane strain deformation mode (PLS2)
line at Element ‘b’ for the n-t coordinate system
330
17 Formability and Sprinback of Sheets
is the termination point for all stress states on the bold dotted line for an interface
direction of h ¼ hA .
~ is also a new position of the stress ‘A’; therefore, Point ‘A’
~ is
Note that Point ‘A’
not only a starting point but also a termination point for stress ‘A’ when h ¼ hA .
Consequently, if the interface direction is arranged as hA for the stress state ‘A’, the
minimum forming limit value is obtained. For example, hA ¼ 0 ; 35:36 ; 45 ,
respectively, for the plane strain deformation (PLS2), simple tension and plane
strain deformation modes (PLS3) for the fully isotropic case, which is obtained
from Eq. (17.13). Here, the relationship between a and b to apply Eq. (17.13) for a
proper interface direction is obtained from the definition of the yield function. If the
Hollomon hardening law with the n-value of 0.0 is applied, the value of the ultimate
minimal forming limit is zero. However, for a non-zero n-value, the value of the
ultimate forming limit is non-zero because of the non-zero uniform deformation
limit. Note here that there is no new plane strain deformation mode available for the
stress between B (PLS2 for h ¼ 0 ) and the balanced biaxial stress state so that, if
any non-zero interface direction is introduced, it has an adverse effect. Therefore,
for such cases, the forming limit is minimal when h ¼ 0 . The values of the ultimate
forming limit with the proper interface directions are compared with the values
obtained with h ¼ 0 in Figs. 17.8, 17.14, 17.15, 17.16 and 17.17.
In Fig. 17.8, the M-K criterion with the proper interface direction becomes
similar with the Hill criterion at the left side of the figure. Also, all criteria meet at
the plane strain deformation mode (PLS2), which is referred to as fld0, since they
share the same interface direction h ¼ 0 and dep22 ¼ 0 throughout the calculation
so that the geometric connectivity condition added to the M-K criterion is also
satisfied by the Dorn and Hill criteria for that mode. In summary, in Fig, 17.8, strain
localization starts at the line of the Dorn criterion and it is terminated at the line for
M-K criterion (with the ultimate h) by breakage for the standard condition. Also,
note that fld0 = the n-value as derived in Eq. (17.6).
Remark #17.2 The plane strain mode (PLS2) line for Hill 1948 planar isotropic
yield function
The straight line of the plane strain deformation mode (PLS2) for the von Mises
yield function, which is rnn ¼ 2rtt , is also confirmed in Fig. 14.8, which shows the
same yield surface shapes for all shear stress values so that PLS2 is aligned along
the rtt ¼ 2rnn line in the overhead view. This is similarly applied to the Hill 1948
planar isotropic case, which has the same yield surface shapes according to
Eq. (14.39), and its straight PLS2 line is rnn ¼ 1 þR R rtt by the second equation of
Eq. (14.41).
Remark #17.3 X-EPS diagram
As discussed with Fig. 17.7, the Dorn and Hill criteria become independent of
deformation history, if they are expressed with effective strains. However, it is a
common practice to express them in the principal strain field as shown in Fig. 17.8,
which is known as the strain-based forming limit diagram. This is mainly
because the forming limit value is experimentally measured with principal strains
17.3
M-K (Marciniak-Kuczynski) Model (1967)
331
under the approximately proportional loading condition. However, the strain-based
forming limit diagram is dependent on deformation history as demonstrated in
Fig. 17.19a. In this figure, results with four different deformation histories are
compared under the standard condition: one with monotonously proportional
loading, the other three, pre-strained by the effective strain of 0.1 with the simple
tension (ST), plane strain 2 (PLS2) and balanced biaxial stress (BB) modes. When
they are expressed with the effective strains in Fig. 17.19b, which is known as the
b-EPS (effective plastic strain) diagram, there is no effect from deformation history.
When the effective limit strains are expressed with respect to the stress ratio a or g
value defined as the triaxiality, g ¼ r11 þ rr22 þ r33 ð¼ r11 þr r22 ¼ rr11 ð1 þ aÞÞ, it is
known as the a-or g-EPS diagram, respectively, while all together they are known
as the X-EPS diagram.
The dependency on deformation history is compared for the M-K criteria in
Fig. 17.20 under the same conditions applied for Fig. 17.19. The strain-based
forming diagram shows significant dependency on deformation history, while the
X-EPS shows significantly less dependency if not complete independence from
deformation history.
Remark #17.4 Breakage of TWIP steel sheet by fracture criterion
Breakage by fracture without strain localization, which is an exception but not the
rule in sheet metal forming, occurs in the case of TWIP (twinning induced plasticity) steel sheets. The derivation of the Dorn criterion suggests that, as the n-value
increases, the onset of strain localization is delayed. The n-value is measured in the
simple tension test as a strain where the slope of hardening intersects with the
hardening curve as suggested by Eq. (17.3). In Fig. 4.12, the n-value of the TWIP
steel sheet is approximately 0.6 while that of the conventional sheet is approximately 0.2–0.3. The large n-value of the steel sheet is attributed to its stiff hardening
behavior associated with its twinning mechanism for plastic deformation. Its
n-value is not only significantly larger than those of typical sheets, but it is also
larger than its own fracture limit. Therefore, it breaks by fracture without strain
(a)
(b)
Fig. 17.19 Comparison of the deformation history effect on the Dorn and Hill criteria under the
standard condition a for the strain-based forming limit diagram and b for the b-EPS diagram
332
17 Formability and Sprinback of Sheets
(a)
(b)
Fig. 17.20 Comparison of the effect of deformation history on the M-K criteria under standard
conditions a for the strain-based forming limit diagram and b for the b-EPS diagram
localization during forming operations. It also deforms more than other sheets in the
typical sheet metal process. However, it has its own drawbacks as its performance
in the hole-expansion process is not as good as other sheets. The hole-expansion
process enlarges a hole with a punch as illustrated in Fig. 17.21. The fracture of this
process occurs at the edge of the hole in the simple tension mode without inducing
much strain localization, unlike typical sheet metal forming processes. The fracture
limit of conventional sheets is much larger than that of the TWIP steel sheet.
Therefore, they break by fracture with little strain localization and perform better
than the TWIP steel sheet due to their larger fracture limits.
Remark #17.5 Invariance of plastic strains with respect to imposed rate at
boundary
The invariance principle which applies to rigid-plastic materials states that, even
though a material is sensitive to strain-rate, its inhomogeneous strain distribution is
insensitive to the difference in deformation velocity that is imposed as a boundary
condition for typical sheet metal forming processes; therefore, not affecting
(a)
(b)
Die
Die
Holder
Holder
Punch
Fig. 17.21 Schematic view of the hole-expansion process: a cross-sectional side view,
b three-dimensional view
17.3
M-K (Marciniak-Kuczynski) Model (1967)
333
formability. Consider the circular cup drawing test shown in Fig. 17.1 as an
example of a typical sheet metal forming process. This cup drawing test is similar
with other sheet forming processes in several aspects. First, there is a velocity
boundary condition imposed by the punch speed to drive deformation. Secondly,
the traction-free boundary condition applies to the free surface of the sheet that is
open to the air without any contact with tools. Additionally, when there is contact
with tools, the Coulomb friction law with a constant friction coefficient shown in
Eq. (17.1) is imposed. Finally, for strain-rate sensitivity, the power law type shown
in Eq. (3.6) is applied with the constant m-value; i.e.,
m
e_
¼ Kf ðeÞ
r
ð17:15Þ
e_ o
where K is the strength coefficient of the sheet. For such a typical process, when the
forming process is performed with various punch speeds, there is no difference in
the inhomogeneous deformation distribution except in the development speed of the
same distribution. This can be proven rigorously and its main feature is summarized
here.
While ignoring the body force term for simplicity, the force equilibrium condition shown in Eq. (1.3) becomes,
m
m
e_
e_
@de
@de
divr ¼ r Kf ðeÞ
¼ Kr f ðeÞ
¼0
e_ o @de
e_ o @de
ð17:16Þ
when Eq. (17.15) is applied for the normality rule shown in Eq. (14.12) under the
plane stress condition. Now, consider the velocity distribution v = vi(x,t), which is
the solution of an initially prescribed velocity boundary condition. Then, consider a
new velocity boundary condition, which is a times that of the initial boundary
condition. For this new velocity boundary condition, assume that its solution is also
a times the initial solution: vnew ¼ avi ðx; tÞ. Then, this assumed solution satisfies the
new velocity boundary condition as well as the force equilibrium condition, since
both the initial and new velocity distributions are the same for their inhomogeneity;
i.e., for the new velocity boundary condition solution,
divrnew
m
e_
@de
¼ ðKa Þr f ðeÞ
¼0
e_ o @de
m
ð17:17Þ
considering the plastic strain rate and the effective plastic strain rate also become a
times the initial values, e_ new ¼ a_ei ðx; tÞ and e_ new ¼ae_ i ðx; tÞ, while Eq (17.16) is the
solution of the initial boundary condition. A comparison of Eqs. (17.16) and
(17.17) suggests that the new velocity boundary condition has the effect of
strengthening (or softening) the strength coefficient of the material by am times the
initial strength coefficient. Therefore, the assumed solution satisfies the traction-free
boundary condition as well as the Coulomb friction law, since the effects of the new
strength coefficient on the left and right sides of Eq. (17.1) are cancelled out.
334
17 Formability and Sprinback of Sheets
Therefore, the assumed solution is just one of various possible new solutions.
However, there is one unique solution for this boundary value problem; therefore,
the assumed solution is the actual solution. Elastic deformation is ignored in this
case, but its contribution is minimal in typical forming processes unless elastic
unloading is involved such as in the case of springback (to be discussed in
Sect. 17.4). Because the constant friction coefficient of the Coulomb friction law
and the constant m-value of the strain-rate sensitivity are approximations and, as the
slight effects of plastic deformation induced heat is ignored, the invariance principle
would be approximately valid in reality.
Remark #17.6 Drawability and the R-value
Even though the R-value has mixed effects on the strain localization (and therefore,
on formability), it is known to have a more positive effect on the drawing process as
its value increases; i.e., better drawability results with a larger R-value. This can be
explained by considering the circular cup drawing process shown in Fig. 17.1 and
the yield surface shapes of various R-values shown in Fig. 14.17. As shown in
Fig. 17.22, the deformation mode of the flange area is approximately the plane
strain 3 (PLS3) mode with depzz ¼ 0ð¼ depxx þ depyy Þ, while that of the wall area is
near the plane strain 2 (PLS2) mode with depyy ¼ 0ð¼ depxx þ depzz Þ since there is no
deformation in the radial direction with deprr ð¼ depyy Þ ¼ 0. Breakage during cup
drawing occurs at the bottom part of the wall in the early stages of the process as
shown in Fig. 17.2a. For good drawability, it is better to have less plastic deformation at the wall and easier plastic deformation at the flange for easy draw-in.
Therefore, as a sheet has lower strength in the plane strain 3 (PLS3) mode at the
flange and higher strength in the plane strain 2 (PLS2) mode at the wall, the sheet
has better drawability, which is the case of the larger R-value.
(a)
(b)
Fig. 17.22 a Schematic view of deformation modes in the circular cup drawing and b the yield
surface in the plane stress state
17.4
17.4
Springback
335
Springback
In a typical sheet metal forming process, material elements in a sheet mostly
undergo stretching, bending as well as large scale torsion and in doing so, internal
stress is developed, which varies through the thickness. After a sheet part is
completed, tools are removed and the internal stress developed during forming is
elastically unloaded, though not completely, such that some residual stress remains
(even though externally loaded force and moment are completely released, as
demonstrated in Chaps. 5–7) and the sheet part undergoes springback, a slight
geometric distortion from the shape of the part formed during the forming process
before tools are released. This springback becomes problematic especially when
forming sheet parts for the automotive industry which requires many sheet parts to
be assembled together. Geometric distorsion incurred by springback can prevent
sheet parts from being properly aligned for assembly.
To evaluate the springback of sheets, two-dimensional U bending and draw
bending tests are commonly performed, which are schematically illustrated in
Figs. 17.23 and 17.24, respectively. For these tests, wider specimens are used for
easier control of specimens and the stress state becomes approximately pure
bending under the plane strain 2 (PLS2) mode, with depyy ¼ 0 and ryy 12 rxx , for
incompressible, isotropic and symmetric (for tension and compression) sheets (as
(a)
(b)
y
Punch
x
Die
(c)
Fig. 17.23 Schematic a cross-sectional side view and b three-dimensional view of the
two-dimensional U bending test and c springback after releasing the tool
336
17 Formability and Sprinback of Sheets
(a)
(b)
Holder
Die
Punch
y
Holder
x
Die
(c)
Fig. 17.24 Schematic a cross-sectional side view and b three-dimensional view of the
two-dimensional draw bending test and c springback after releasing tools
suggested by Fig. 12.3), while the pure bending discussed in Sect. 6.1 is under the
simple tension and compression with ryy ¼ 0.
When the hardening behavior for loading and reverse loading shown in Fig. 15.7
is applied for pure bending and reverse bending as similarly done in Sect. 6.1, the
bending moment behavior resembles the hardening behavior as schematically
shown in Fig. 17.25.
(a)
(b)
Fig. 17.25 a The hardening for loading and reverse loading and b moment for bending and
reverse bending
17.4
Springback
337
The amount of recovered curvature (therefore, the amount of springback) for the
U bend test and the two corners at the top and bottom of the draw bending test is
Y
DK1 , which is proportional to Eh
and the amount of initial bending applied before
reverse bending, as suggested by the simple analysis in Sect. 6.1. Here, Y is the
yield stress, E is Young’s modulus and h is the sheet thickness.
As for the amount of springback of the side wall in the draw bending test, the
bending curvature is recovered after the initial curvature is fully released, as DK2
Y
marked in Fig. 17.25b. This amount is also proportional to Eh
and the amount of
initial bending applied before reverse bending. However, the amount of springback
by the side wall is also highly dependent on the transient behavior in the reverse
loading shown in Fig. 17.25a. Note that the linear kinematic hardening underestimates springback, while the isotropic hardening tends to overestimate springback.
Occasionally, the isotropic hardening performs better than the linear kinematic
hardening in simulating springback, even though it does not properly account for
the Bauschinger behavior. The side wall forms a curved shape after springback,
which is known as the side wall curl.
In Fig. 17.26, the springback of two automotive sheets from a draw bending test
are compared, including their strength, Young’s modulli and thicknesses. With
much greater strength, the DP950 sheet results in a larger amount of springback
than that of the ES340 sheet (even though its Young’s modulus and thickness are
(a)
(b)
(c)
Fig. 17.26 a Comparison of springback in the draw bending test of two sheets, while b, c are their
strength and Young’s moduli
338
17 Formability and Sprinback of Sheets
(a)
(b)
(c)
(d)
Fig. 17.27 a Schematic view of the stress distributions after pure bending and before unloading in
the hardening curve as well as a schematic view of the stress distribution through the thickness
b after pure bending, c added stress by uniform stretching and d before unloading
larger than those of the ES340 sheet). Also, note that Young’s modulus decreases
and saturates during forming as shown in the figure for both sheets. This suggests
that to accurately estimate springback, properly measuring the evolution of Young’s
modulus is required.
One way to decrease springback is to introduce additional stretching (in term of
deformation) at bended locations at the last moment of forming before releasing the
tools. A schematic view of the stress distributions in the hardening curve and
through the thickness (from A to I) after pure bending are shown in Fig. 17.27a, b,
respectively. A newly added stress distribution through the thickness incurred by
the additional uniform stretching is illustrated in Fig. 17.27c, while the final stress
distributions before unloading in the hardening curve (from A′ to I′) and through the
thickness are illustrated in Fig. 17.27a, d. Then, as schematically demonstrated in
Fig. 17.27d, with added stretching, the bending moment decreases (with respect to
the center of the thickness) and as does the amount of springback.
References
339
References
Chung, K., & Wagoner, R. H. (1998). Invariance of plastic strains with respect to imposed rate at
boundary. Metals and Materials, 4, 25–31.
Considère, A. (1885). Annales des Ponts et Chaussées. 9, 574–775.
Dorn, J. E., & Thomsen, E. G. (1947). The ductility of metals under general conditions of stress
and strain. Transactions of the American Society for Metals, 39, 741–772.
Hill, R. (1948). A theory of the yielding and plastic flow of anisotropic metals. In Proceedings of
the Royal Society of London, p. 281.
Hill, R. (1952). On discontinuous plastic states, with special reference to localized necking in thin
sheets. Journal of the Mechanics and Physics of Solids, 1, 19–30.
Hosford, F., & Caddell, M. (2014). Metal forming: Mechanics and metallurgy (4th ed.).
Cambridge University Press.
Marciniak, Z., & Kuczyński, K. (1967). Limit strains in the processes of stretch-forming sheet
metal. International Journal of Mechanical Sciences, 9, 609IN1613–1612IN2620.
Swift, H. W. (1952). Plastic instability under plane stress. Journal of the Mechanics and Physics of
Solids, 1, 1–18.
Appendix
Basics of Crystal Plasticity
The fundamentals of crystal plasticity are introduced here, mainly accounting for
the plastic deformation by the slide of dislocations, but not including that by
twinning. Most discussions are based on the Schmid law for cubic metals. Initially,
the well-known Taylor and Bishop-Hill crystal plasticity models are discussed
mostly under simple tension deformation. The Bishop-Hill and Taylor models used
the same isostrain assumption, but the first makes the solution procedure simpler
and systematic than Taylor model. Then, the rate-dependent crystal plasticity
approach based on the Taylor model follows for general stress states.
A.1 Schmid Law
When a single crystal deforms under simple tension, crystallographic slip begins in
a specific direction when the shear stress resolved onto a slip plane reaches a critical
value. The pair of the slip plane and direction is named as the slip system. Slip
systems represent the close-packed atomic directions on close-packed atomic plane,
which yield the smallest magnitude of Burger’s vector, physically accounting for
the direction of the easiest dislocation slide. The potential slip systems for cubic
crystals commonly known are listed in Table A.1. As shown in the table, the
initiation of the crystallographic slips in the face-centered cubic (FCC) crystals
occur on {111}<110> slip systems, while more slip systems are involved in
body-centered cubic (BCC) crystals. The crystal shear stress which needs to be
overcome to initiate slip is called the critical resolved shear stress (CRSS), sc .
Mathematically, the slip initiation condition or Schmid law under simple tension
becomes, after applying Eq. (8.16) with newly defined notations for directions,
sns ¼ ‘nx ‘sx rxx ¼ rxx cos k cos / ¼ sc
ðA:1Þ
where sns , rxx ð¼ r11 Þ, ‘nx and ‘sx are shear stress in the slip direction of s on the slip
plane with its normal direction of n, applied simple tension stress and directional
cosines between the loading axis and slip plane normal and slip direction,
respectively. Also, k and / are the angles between the loading axis and slip plane
© Springer Nature Singapore Pte Ltd. 2018
K. Chung and M.-G. Lee, Basics of Continuum Plasticity,
https://doi.org/10.1007/978-981-10-8306-8
341
342
Appendix: Basics of Crystal Plasticity
Table A.1 Slip systems of cubic crystals
Cubic crystals
Slip direction
Slip plane normal
FCC
BCC
<110>
<111>
{111}
{110}, {112}, {123}
normal and slip direction, respectively, as illustrated in Fig. A.1. In this figure, the
crystal lattice rotation is included due to the finite deformation of single crystal with
a single slip system. Therefore, the simple tension stress required to initiate the
dislocation slip in a single crystal with a single slip system is
rxx ¼
sc
sc
¼
cos k cos / m
ðA:2Þ
where m is called as the Schmid factor for one slip system. Note that most of the
classical crystal plasticity theories are based on this Schmid law for simple tension
and its extension to general stress states.
The Schmid law described for simple tension can be extended to general stress
states. When all six independent stress components are considered, the resolved
shear stress on the cubic slip systems can be expressed as, after applying Eq. (8.16),
sns ¼
3 X
3
X
j
‘ni ‘sj rij
ðA:3Þ
i
which is simply an extension of Eq. (A.1) for general stress states. Here, ‘ni and ‘sj
are directional cosines between the slip plane normal and the i-th axis and between
the slip direction and the j-th axis, respectively, as ‘ni ¼ jnnj eci and ‘sj ¼ jssj ecj .
Note that the stress tensor here is based on the crystal coordinate system since the
slip systems for cubic crystals are prescribed based on cubic axes of crystals. Since
the stress state is generally referred to the sample (or global) coordinates, tensor
transformation is necessary before applying Eq. (A.3) derived here.
Fig. A.1 Schematic view of deformation of a single crystal specimen under simple tension
Appendix: Basics of Crystal Plasticity
343
A.2 Talyor Model
Before the Taylor model was proposed, there was the Sachs model (1928), which was
based on the isostress assumption to calculate the stress under simple tension for
isotropic polycrystals with FCC structures. But, this model violated the geometric
compatibility condition in strain at interfaces with neighboring grains. To overcome
this drawback, the Taylor (1938) proposed the isostrain model, in which the geometric
compatibility condition was satisfied since all grains were assumed to undergo the
same deformation. Then, the Taylor model calculated the yield stress in simple tension for isotropic polycrystals as a function of critical resolved shear stress (CRSS).
In the Taylor model, the plastic strain increment tensor given as an input is
associated with the simple shear strain increment on each slip system as, after
applying Eq. (11.40) for the simple shear deformation shown in Eq. (11.52) with
newly defined notations for directions,
deij ¼
N X
S
X
‘in ‘js dcns
ðA:4Þ
n¼1 s¼1
where dcns ð¼ 2dens Þ is the simple shear strain increment on the slip system with
slip normal n and slip direction s. For FCC crystals, the number of slip normal N is
4 and the number of slip direction corresponding to each slip normal S is 3. In
Table A.2, the typical naming of each slip system and its associated shear strain are
listed. Eq. (A.4) for the FCC crystal is expanded as
1
de11 ¼ pffiffiffi ðdca2 þ dca3 dcb2 þ dcb3 dcc2 þ dcc3 dcd2 þ dcd3 Þ
6
1
de22 ¼ pffiffiffi ðdca1 dca3 þ dcb1 dcb3 þ dcc1 dcc3 þ dcd1 dcd3 Þ
6
1
de33 ¼ pffiffiffi ðdca1 þ dca2 dcb1 þ dcb2 dcc1 þ dcc2 dcd1 þ dcd2 Þ
6
1
dc23 ¼ pffiffiffi ðdca2 dca3 þ dcb2 dcb3 þ dcc2 dcc3 þ dcd2 dcd3 Þ
6
1
dc31 ¼ pffiffiffi ðdca1 þ dca3 dcb1 þ dcb3 dcc1 þ dcc3 dcd1 þ dcd3 Þ
6
1
dc12 ¼ pffiffiffi ðdca1 dca2 þ dcb1 dcb2 þ dcc1 dcc2 þ dcd1 dcd2 Þ
6
ðA:5Þ
The above equations are obtained from the directional cosines calculated based on
the slip systems for the FCC crystal expressed in the crystal coordinate system.
Note that the strain increment tensor component, deij , is also based on the crystal
coordinate system and it is calculated by tensor transformation from that given as an
input based on the global coordinate system, dep0 q0 ; i.e., deij ¼ ‘ip0 ‘jq0 dep0 q0 .
344
Appendix: Basics of Crystal Plasticity
From the condition of incompressibility or volume consistency during plastic
deformation, de11 þ de22 þ de33 ¼ 0, only five equations in Eq. (A.5) are independent. Therefore, at least five slip systems need to be activated for achieving
general shape changes, meaning that, among 12 slip systems in FCC crystals, five
or more shear strain components in the right hand side of Eq. (A.5) are not zero.
Among many non-unique solution sets of five simple shear strain increments, the
Taylor model selects a set of five independent crystallographic shear strain increment by applying the following minimum total shear strain principle, which
requires the minimum plastic work increment condition for the dislocation slip:
dw ¼
5
X
jsi dci j ¼ sc
i¼1
5
X
jdci j ¼ sc dc
ðA:6Þ
i¼1
assuming that the critical resolved shear stresses of all activated slip systems are the
same as a constant sc . Considering Eq. (A.6), a set of the active slip systems is
determined from a set which satisfies the minimum sum of five shear strain
increments among all possible combinations of slip systems. Therefore, for the
simple tension test of the FCC crystal, the Taylor factor M for the sum of active
shear strain increment is obtained from
dw ¼ sc dc ¼ rxx dexx ð¼ r11 de11 Þ and
rxx
dc
¼
¼M
dexx
sc
ðA:7Þ
Here, the Taylor factor M is the ratio of the sum of activated shear strain increment
to the strain increment along tensile loading direction. The Taylor factor is
dependent on the orientation of the activated slip system, so an averaged value of M
is usually used by averaging values over the primary stereographic triangle using
is 3.06 for
the same procedure described above. This averaged M value (or M)
randomly oriented (thus isotropic) aluminum polycrystal.
A.3 Bishop and Hill Model
Bishop and Hill (1951) proposed similar analysis as Taylor using the isostrain
approach to preserve the shape compatibility. Contrary to the Taylor model, this
model intended to find stress states directly, which could activate at least five slip
systems satisfying the prescribed shape change. The condition for yielding of each
slip system can be obtained by calculating shear stress resolved on the slip system
from given stress state which refers to the crystal coordinate system. This leads to
the following general equation for the calculation of resolved shear stress on the slip
system ns in Table A.2.
Appendix: Basics of Crystal Plasticity
345
Table A.2 12 slip systems for FCC crystals
Plane (n)
(111)
Direction (s)
01-1
-101
1-10
(-1-11)
0-1-1
101
-110
(-111)
01-1
101
-1-10
(1-11)
0-1-1
-101
System
a1
a2
a3
b1
b2
b3
c1
c2
c3
d1
d2
d3
Strain
ca1
ca2
ca3
cb1
cb2
cb3
cc1
cc2
cc3
cd1
cd2
cd3
110
rns ¼ ln1 ls1 r11 þ ln2 ls2 r22 þ ln3 ls3 r33
þ ðln2 ls3 r23 þ ln3 ls2 r32 Þ þ ðln3 ls1 r31 þ ln1 ls3 r13 Þ þ ðln1 ls2 r12 þ ln2 ls1 r21 Þ
ðA:8Þ
For instance, the shear stress on the slip system a1 or [01-1](111) system in
Table A.2 is calculated as
ra1 ¼ la1 l11 r11 þ la2 l12 r22 þ la3 l13 r33
þ ðla2 l13 r23 þ la3 l12 r32 Þ þ ðla3 l11 r31 þ la1 l13 r13 Þ þ ðla1 l12 r12 þ la2 l11 r21 Þ
ðA:9Þ
The directional cosines between this slip system and the crystal coordinate system
are listed in Table A.3. Substituting these values into the above equation, Eq. (A.9),
results in
pffiffiffi
ra1 ¼ ðr22 r33 r31 þ r12 Þ= 6
ðA:10Þ
Plastic flow or yielding on this slip system occurs if the shear stress reaches the
critical resolved shear stress (CRSS). Thus, the slip or yield criterion for the slip
system [01-1](111) is expressed as
pffiffiffi
ðr22 r33 r31 þ r12 Þ= 6 ¼ sc
ðA:11Þ
Here − sign represents a slip in the reversed direction. When the new notation for
ffiffi 33 , G ¼ prffiffi31 , H ¼ prffiffi12 , Eq. (A.11) is written as
the stress is defined as A ¼ r22pr
6s
6s
6s
c
c
c
A G þ H ¼ 1
Table A.3 Directional cosines between slip system [01-1](111) and FCC crystal axes
[100]
143
144
Slip plane a = (111)
p1ffiffi
3
Slip direction 1 = [01-1]
0
[010]
p1ffiffi
3
p1ffiffi
2
[001]
p1ffiffi
3
p1ffiffi2
346
Appendix: Basics of Crystal Plasticity
Similarly, the yield criteria for all 12 (24 if reverse slip is considered) slip systems
can be obtained with proper simplified notation of stress and they are listed in
Table A.4. The notations of stresses in the table are
r22 r33
r33 r11
r11 r22
pffiffiffi
; B ¼ pffiffiffi
; C ¼ pffiffiffi
6s c
6s c
6s c
r23
r31
r12
F ¼ pffiffiffi ; G ¼ pffiffiffi ; H ¼ pffiffiffi
6s c
6s c
6s c
A¼
ðA:12Þ
Bishop and Hill tried to find combination of stress states such that the critical
resolved shear stress (CRSS) is reached on five slip systems while others do not.
For instance, when A = 1 and B = −1 with others are zero, this results in 8 active
slip systems, a1, b1, c1, d1, −a2, –b2, −c2, −d2, (or satisfies the yield criteria in
Table A.4), while other slip systems are inactive. Note that this stress state
pffiffiffi
corresponds to the uniaxial compression along [001] direction; i.e., r33 ¼ 6sc ;
r11 ¼ r22 ¼ r12 ¼ r23 ¼ r13 ¼ 0.
With similar manner, Bishop and Hill showed that 28 stress states satisfied the
activation of 5 or more equations in Table A.4. Table A.5 shows the Bishop and
Hill stress criteria which activate corresponding slip systems. For example, the
above discussed stress state corresponds to the B-H stress state 1 (or A = 1,
B = −1, C = F = G = H = 0), in which eight slip systems are active. Note that +
and − in the Table A.5 represent the forward and reverse slips, respectively, and 0
means nonactive slip system.
To determine the possible stress states corresponding under prescribed deformation, Bishop and Hill applied the principle of maximum work in which the stress
state maximizes the external work done. The plastic work increment is expressed as
dwp ¼ r de ¼ r11 de11 þ r22 de22 þ r33 de33 þ 2ðr12 de12 þ r31 de31 þ r23 de23 Þ
ðA:13Þ
Equation (A.13) can be rewritten in the form of the stress notation by Bishop and
Hill after applying the incompressibility condition, de33 ¼ de11 de22 ,
dwp ¼
pffiffiffi
6sc ðBde11 þ Ade22 þ 2Fde23 þ 2Gde31 þ 2Hde12 Þ
ðA:14Þ
Table A.4 Bishop and Hill yield criteria for FCC crystals (+, − represent the forward and reverse
slip, respectively)
Slip
system
Yield criterion
Slip
system
Yield criterion
Slip
system
Yield criterion
±a1
±b1
±c1
±d1
A G þ H ¼ 1
A þ G þ H ¼ 1
A þ G H ¼ 1
A G H ¼ 1
±a2
±b2
±c2
±d2
B þ G H ¼ 1
B G H ¼ 1
B þ G þ H ¼ 1
B G þ H ¼ 1
±a3
±b3
±c3
±d3
C F þ G ¼ 1
C þ F G ¼ 1
C F G ¼ 1
C þ F þ G ¼ 1
Appendix: Basics of Crystal Plasticity
347
Table A.5 Bishop-Hill stress states and activated slip systems (Hosford 1993)
B-H stress states
1
178
179
180
181
182
183
184
185
186
187
188
Active slip systems
A
B
C
F
G
H
a1
a2
a3
b1
b2
b3
c1
c2
c3
d1
d2
d3
1
−1
0
0
0
0
+
−
0
+
−
0
+
−
0
+
−
0
2
0
1
−1
0
0
0
0
+
−
0
+
−
0
+
−
0
+
−
3
−1
0
1
0
0
0
−
0
+
−
0
+
−
0
+
−
0
+
4
0
0
0
1
0
0
0
+
−
0
−
+
0
+
−
0
−
+
5
0
0
0
0
1
0
−
0
+
+
0
−
+
0
−
−
0
+
6
0
0
0
0
0
1
+
−
0
+
−
0
−
+
0
−
+
0
7
1/2
−1
1/2
0
1/2
0
0
−
+
+
−
0
+
−
0
0
−
+
8
1/2
−1
1/2
0
−1/2
0
+
−
0
0
−
+
0
−
+
+
−
0
9
−1
1/2
1/2
1/2
0
0
−
+
0
−
0
+
−
+
0
−
0
+
10
−1
1/2
1/2
−1/2
0
0
−
0
+
−
+
0
−
0
+
−
+
0
11
1/2
1/2
−1
0
0
1/2
+
0
−
+
0
−
0
+
−
0
+
−
12
1/2
1/2
−1
0
0
−1/2
0
+
−
0
+
−
+
0
−
+
0
−
13
1/2
0
−1/2
1/2
0
1/2
+
0
−
+
−
0
0
+
−
0
0
0
14
1/2
0
−1/2
−1/2
0
1/2
+
−
0
+
0
−
0
0
0
0
+
−
15
1/2
0
−1/2
1/2
0
−1/2
0
+
−
0
0
0
+
0
−
+
−
0
16
1/2
0
−1/2
−1/2
0
−1/2
0
0
0
0
+
−
+
−
0
+
−
0
17
0
−1/2
1/2
0
1/2
1/2
0
−
+
+
−
0
0
0
0
−
0
+
0
18
0
−1/2
1/2
0
−1/2
1/2
+
−
0
0
−
+
−
0
+
0
0
19
0
−1/2
1/2
0
1/2
−1/2
−
0
+
0
0
0
+
−
0
0
−
+
20
0
−1/2
1/2
0
−1/2
−1/2
0
0
0
−
0
+
0
−
+
+
−
0
21
−1/2
1/2
0
1/2
1/2
0
−
+
0
0
0
0
0
+
−
−
0
+
22
−1/2
1/2
0
−1/2
1/2
0
−
0
+
0
+
−
0
0
0
−
+
0
23
−1/2
1/2
0
1/2
−1/2
0
0
+
−
−
0
+
−
+
0
0
0
0
24
−1/2
1/2
0
−1/2
−1/2
0
0
0
0
−
+
0
−
0
+
0
+
−
25
0
0
0
1/2
1/2
−1/2
−
+
0
0
0
0
+
0
−
0
−
+
26
0
0
0
1/2
−1/2
1/2
+
0
−
0
−
+
−
+
0
0
0
0
27
0
0
0
−1/2
1/2
1/2
0
−
+
+
0
−
0
0
0
−
+
0
28
0
0
0
1/2
1/2
1/2
0
0
0
+
−
0
0
+
−
−
0
+
189
190
Then, the Taylor factor M can be obtained from the following relationship,
M¼
1 dwp pffiffiffi
de11
de22
de23
de31
de12
¼ 6 B
þA
þ 2F
þ 2G
þ 2H
ðA:15Þ
sc dezz
dezz
dezz
dezz
dezz
dezz
where the coordinate ‘z’ corresponds to the loading direction. Therefore, the states
of stress for corresponding prescribed deformation can be determined by substituting the 28 (56 for reversed slip cases) stress states listed in Table A.5 into
Eq. (A.15) and checking the maximum value of M.
For general case, the global (macroscopic) strain accommodating prescribed
deformation is transformed to the strain tensor along the crystal coordinate system.
Then, these strains are substituted to Eq. (A.14) or (A.15). Finally, the 28 (or 56)
stress states by Bishop and Hill in Table A.5 are substituted to the equation and the
stress states that maximize the plastic work increment or M are sought.
348
Appendix: Basics of Crystal Plasticity
A.4 Application to Textured Sheets
For the simple tension of textured sheet metals, the increments of plastic strains
along the width ðdew Þ and thickness ðdet Þ directions are different due to the anisotropy of materials. To quantify this anisotropy during plastic deformation, the
Lankford coefficient or R-value is defined as
R¼
dew
det
ðA:16Þ
When the incompressibility condition is applied ðdet ¼ del dew Þ, Eq. (A.16)
becomes
de
R¼
w
dew
q
del
¼
¼
w
1
q
ðdel þ dew Þ 1 de
de
ðA:17Þ
l
where del is the plastic strain increment in the loading direction. The parameter q
is often preferred because the difficulty in measuring the strain increment in the
thickness direction. To apply the Taylor model or Bishop-Hill model, the shape
change needs to be specified. This shape change can be described by q.
When the simple tension strain is prescribed in the x-direction, dexx , the other
two strain components are expressed as
deyy ¼ qdexx ;
dezz ¼ ðq 1Þdexx
ðA:18Þ
All shear strain components are zero for the simple tension. Using the above
prescribed condition for the shape change, the Taylor factor M can be calculated by
applying Bishop-Hill theory.
As an example, a simple tension is applied to a sheet with [112](110) texture
along the rolling direction. First, the strain tensor in the global coordinate is
transformed to the one in the crystal coordinate; i.e., deij ¼ lip0 ljq0 dep0 q0
The transformation matrix is defined as below considering x ¼ ½1 12;
y ¼ ½111; z ¼ ½110, where x, y, z correspond to the loading, transverse (width),
and thickness direction, respectively.
0
½L ¼
p1ffiffi
6
B p1ffiffi
@
3
p1ffiffi
2
p1ffiffi6
p1ffiffi
3
p1ffiffi
2
1
p2ffiffi
6
p1ffiffi C
3A
ðA:19Þ
0
Then, the strain tensor with respect to the cubic crystal coordinate is
½dec ¼ ½L½deg ½LT or deij ¼ Lip0 dep0 q0 Lq0 j
ði; j ¼ 1; 2; 3; p0 ; q0 ¼ x; y; zÞ ðA:20Þ
Appendix: Basics of Crystal Plasticity
349
where ½dec and ½deg are strain tensors with respect to the cubic crystal and global
coordinate systems, respectively. Dividing each strain component in the crystal
coordinate system by the strain increment in the loading direction leads to
de11 1
1 de22 1
1 de33
1
2
¼ q ;
¼ q ;
¼ qþ
3 dexx 6
3 dexx
3
3
dexx 6
dc23
2
2 dc31 2
2 dc12 5
4
¼ q ;
¼ qþ ;
¼ q
3
3 dexx 3
3 dexx 3
3
dexx
ðA:21Þ
These equations are substituted into Eq. (A.15) to obtain the Taylor factor M.
pffiffiffi 1
pffiffiffi 1
pffiffiffi
1
1
2
2
M ¼ 6A q 6B q þ 6F q 6
3
6
3
3
3
pffiffiffi 2
p
ffiffi
ffi
2
5
4
þ 6G q þ
þ 6H q 3
3
3
3
ðA:22Þ
After rearranging the equation,
M¼
pffiffiffi A þ B 2F þ 2G 4H
A B 4F þ 4G þ 10H
þq
6
3
3
ðA:23Þ
Finally, 28 (or 56) Bishop-Hill stress states are substituted into the above equation
and the stress state which results in the largest value of M is obtained. In this
pffiffiffi
example, the stress state 22 in Table A.5 gives the maximum M ¼ 6 1 þ q2 for
pffiffiffi4 q
1
6 3 6 for
2 q 1, while stress state −26 gives the largest value M ¼
0 q\ 12. If the material is assumed to deform with the least energy, the minimum
pffiffi
value of M will be appropriate, which corresponds to q ¼ 12 or M ¼ 5 4 6. More
complete discussion can be referred to Hosford (1993).
A.5 Rate-Dependent Crystal Plasticity Approach
The Taylor-Bishop-Hill model has time-independent nature and the selection of
operating slip systems are essential. Also, these models ignore the elasticity, or
rigid-plasticity. As an alternative to this rate-insensitive crystal plasticity approach,
the elastic-plastic rate-dependent crystal plasticity model was proposed (Hutchinson
1976).
350
A.5.1
Appendix: Basics of Crystal Plasticity
Single Crystal Kinematics and Plastic Deformation
A classical isothermal crystal plasticity model is physically based on the sliding of
dislocations on slip systems and it is mathematically associated with the context of
continuum mechanics (Asaro 1979; Rice 1983). Among numerous different
approaches in the crystal plasticity, the rate-dependent model is different from the
classical rate-independent model in terms of the yield condition and
loading-unloading criterion. In the rate-dependent crystal plasticity model the
crystallographic slip, thus the movement of dislocation sliding, is assumed to occur
in all slip systems once the resolved shear stress on a slip system is non-zero.
The kinematics of the crystal plasticity is based on the multiplicative decomposition of the total deformation gradient into its elastic and plastic parts (see
Remark #16.1). The stress occurs due to the elastic distortion of the lattice; thus, it
is only related to the elastic part of the deformation gradient. On the contrary, the
state by the plastic part of deformation gradient represents plastic slip and it is often
called as “stress-free” or “intermediate” state. Figure A.2 shows the decomposition
of total deformation gradient into the elastic and plastic parts. The intermediate state
is associated with the plastic part of deformation gradient, thus there is no lattice
distortion and cannot be distinguished from the original lattice configuration due to
the idealized dislocation motion. Note that Fig. A.2 is equivalent to Fig. 16.1 in
which one-dimensional multiplicative elasto-plastic deformation gradients for finite
deformation theory is presented.
The above statement can be expressed as following (Eq. (16.2)).
F ¼ Fe Fp
where Fp represents the deformation gradient associated with the dislocation glide
on specific crystal slip planes and Fe is associated with elastic distortion and rigid
body rotation.
Motion of dislocations on the active slip plane a with its slip plane normal na
p
and slip direction sa , results in a rate of plastic part of deformation gradient, F_
p
F_ ¼ Lp Fp ; and
Lp ¼
ns
X
c_ a sa0 na0
ðA:24Þ
a¼1
where denotes the tensor product or dyadic. sa0 and na0 are orthonormal unit
vectors representing the slip direction and slip plane normal, respectively, in the
reference configuration. Lp is velocity gradient calculated from the plastic part of
deformation gradient and c_ a is a rate of shear on a slip system a which is explained
below in detail.
In the rate-dependent crystal plasticity approach, the non-unique selection of
active slip systems for the prescribed plastic deformation is solved by introducing a
shear rate as a function of resolved shear stress on a slip system. There are many
different types of the shear rate function, but the most commonly used one takes the
Appendix: Basics of Crystal Plasticity
351
(a)
Fp
Fe
Stress-free
Configuration
F
Undeformed
Configuration
Deformed
Configuration
(b)
Fig. A.2 Multiplicative decomposition of deformation gradient into elastic and plastic parts;
a schematic drawing of atomic positions and b its simplified representation by lattice configuration
352
Appendix: Basics of Crystal Plasticity
power-law form (Hutchison 1976; Peirce et al. 1983). The shear rate on slip system
a is expressed as following (Peirce et al. 1983)
a m1
s c_ a ¼ c_ a0 signðsa Þ a g
ðA:25Þ
where c_ a0 is a reference shear rate, sa is the resolved shear stress onto the slip plane
a, and m is the strain rate sensitivity exponent. ga is the slip resistance explaining
the hardening with plastic strain on the slip system. The typical form for the
evolution of this slip resistance is
g_ a ¼
ns
X
hab c_ b ðA:26Þ
b¼1
where ‘ns’ is the total number of slip systems, and hab is hardening coefficient
matrix and represents interactions of dislocations among different slip planes. Note
that in the rate-dependent formulation the resolved shear stress of conjugate slip
system can be larger than currently active primary slip system hardness; i.e., latent
hardening. The ratio of the conjugate flow stress to the current primary flow stress
is introduced to explain this latent hardening effect. The typical form for this matrix
for the interaction between slip system a and b is
h
ab
¼ h q þ ð1 qÞdab
b
a
gb
; h ¼ h0 1 gs
b
ðA:27Þ
where q is the ratio of latent-to-self hardening coefficient, h0 is a reference
self-hardening coefficient, a is the strain hardening exponent, and gs is the saturated
slip resistance. Typical value of q is suggested between 1 and 1.4 from various
experimental measurements. The form of shear rate equation is not limited to the
above one. But, the equation should describe the phenomenologically observed
features of metallic single crystals such as orientation dependence of predicted flow
stresses, transient flow stress behavior from the Stage I to Stage III hardening, and
latent hardening.
A.5.2
Single Crystal Elasticity
For metallic materials, the elastic deformation can be assumed as small enough
compared to its plastic counterpart. Thus, constitutive equation for single crystal
can be described as linear anisotropic. For the stress and deformation measurements, the second Piolar-Kirchhoff stress and its conjugate Lagrangian strain tensor
are respectively used.
Appendix: Basics of Crystal Plasticity
353
S ¼ CEe
ðA:28Þ
with S ¼ Fe1 fðdet Fe ÞrgFeT and Ee ¼ 12 FeT Fe I
where C is the fourth order tensor containing the anisotropic elasticity constants,
S is the second Piolar-Kirchhoff stress tensor, r is the Cauchy stress, Ee is the
elastic part of Lagrangian strain tensor, and I is the identity tensor.
The anisotropic elasticity tensor for a cubic single crystal is defined by the three
independent material constants, c11, c12, and c44 in which the subscript denotes an
orthonormal basis of the cubic crystal lattice. The elastic constants of some cubic
crystals are listed in Table A.6 (Simmons and Wang 1971).
Equation (A.28) shows that the stress can be obtained once the elastic part of the
deformation gradient is known. Also, this elastic deformation gradient is obtained
once the plastic part of deformation gradient is calculated.
A.5.3
Application to Polycrystals
For polycrystalline metals, a material point is represented by aggregation of multiple single crystals. Therefore, proper homogenization procedure considering
individual constitutive response of single crystal should be applied. There are the
most popular three types of averaging procedures; Taylor (1938), Sachs (1928), and
self-consistent (Kocks et al. 1998) models. The simplest one among these is Taylor
type polycrystalline model in which the same deformation gradient (F) is applied
for all constituent grains (or crystals). Thus, the compatibility of the deformation is
automatically satisfied, while the force equilibrium among individual grains is not
satisfied. In the Taylor type model, it is usually assumed that the stress tensor of
polycrystalline aggregates is the same as its averaged one with additional equal
volume constraint. That is, individual grain in the polycrystal is assumed to have the
same volume. Then,
r¼
N
1X
rk
N i¼1
ðA:29Þ
Table A.6 Elastic constants of cubic crystals (unit: GPa, at room temperature)
Material
c11
c44
c12
Al
Ag
Au
Cu
Ni
Fe
Ta
108.2
124.0
186.0
168.4
246.5
228.0
267.0
46.1
46.1
42.0
75.4
124.7
116.5
82.5
93.4
93.4
157.0
121.4
147.3
132.0
161.0
354
Appendix: Basics of Crystal Plasticity
where r is macroscopic Cauchy stress of the polycrystal, N is the number of
crystals comprising the material point, and rk is the Cauchy stress of individual
grain k, which is calculated numerically as described in the following section.
A.5.4
Summary of Numerical Implementation
A numerical scheme to implement the general rate-dependent crystal plasticity is
similar to that of classical stress update for elasto-plasticity.
update
In the stress
procedure, the variables in the previous time increment n, rn ; Fpn ; gan are known
along with slip systems sa0 ; na0 . The stress tensor, plastic deformation gradient
tensor, slip resistance, and orientation of slip systems are then updated for a given
total deformation gradient at the time step n+1, Fn þ 1 . The shear rate on each slip
system can be discretized considering the given time step Dt as a general form.
Dca ¼ c_ a Dt ¼ / san þ 1 ; gan þ 1
ðA:30Þ
Because the resolved shear stress san þ 1 and flow stress (or slip resistance) gan þ 1 are
functions of Dca , the above equation is a system of nonlinear equations in terms of
Dca . The set of equations is usually solved by the Newton-Raphson method.
Detailed numerical procedure for rate-dependent crystal plasticity can be referred to
(Kalidindi 1992). Then, the plastic part of deformation gradient is obtained from
Eq. (A.24), and elastic part can be calculated by the multiplicative decomposition
Eq. (16.2). Finally, the stress of each crystal is obtained from Eq. (A.28) (Note that
the second Piolar-Kirchhoff stress can be transformed to the Cauchy stress).
Once the stress at the current time step is calculated the new orientations of
grains can be updated considering elastic part of deformation gradient Fen þ 1 or
approximately the rotation tensor in the polar decomposition of it, Ren þ 1 .
san þ 1 ¼ Fen þ 1 sa0 or san þ 1 ’ Ren þ 1 sa0
nan þ 1 ¼ Fen þ 1 na0 or nan þ 1 ’ Ren þ 1 na0
ðA:31Þ
References
Asaro, R. J. (1983). Crystal plasticity. ASME Journal of Applied Mechanics, 50, 921–934.
Bishop, J. F. W., & Hill, R. (1951). A theory of the plastic distortion of a polycrystalline aggregate
under combined stresses. 42, 414.
Hosford, W. F. (1993). The mechanics of crystals and textured polycrystals. New York: Oxford
University Press
Appendix: Basics of Crystal Plasticity
355
Hutchinson, J. W. (1976). Bounds and self-consistent estimates for creep of polycrystalline
materials. Proceedings of the Royal Society of London A, 348, 101–127.
Kalidindi, S. R. (1992). Polycrystal plasticity: Constitutive modeling and deformation process (Ph.
D. Thesis). M.I.T., USA.
Kocks, U. F., Canova, G. R., Tome, C. N., Rollett, A. D., & Wright, S. I. Computer Code
LA-CC-88-6. Los Alamos, NM: Los Alamos National Laboratory.
Kocks, U. F., Tome, C. N., Wenk, H. R. (1998). Texture and anisotropy. Cambridge University
Press.
Peirce, D., Asaro, R. J., Needleman, A. (1983). Material rate dependence and localized
deformation in crystalline solids. Acta Metallurgica, 31, 1951–1976.
Rice, J. R. (1971). Inelastic constitutive relations for solids: An internal variable theory and its
application to metal plasticity. Journal of the Mechanics and Physics of Solids, 19, 433–455.
Sache, G. (1928). Zur ableilung einer fleissbedingung. VDl Z. 72,734.
Simmons, G., & Wang, H. (1971). Single crystal elastic constants and calculated aggregate
properties. Cambridge: The M.I.T. Press.
Taylor, G. I. (1938). Plastic strain in metals. Journal of the Institute of Metals, 62, 307.
Index
A
Accumulative effective plastic strain, 235
Adiabatic, 157
Angular momentum, 9
Anisotropic coeffecients, 284
Anisotropic constants, 272
Anisotropic yield functions, 284
Anti-symmetric, 132
Area vector, 125
Associate flow rule, 232
Average R-value, 271
Axial vector, 186
B
Backstress, 292
Balanced Biaxial Compression (BBC), 208
Balanced Biaxial Tension (BBT), 208
Bauschinger behavior, 63
Bauschinger phenomenon, 27
Beam theory, 73, 88
Bishop and Hill, 346
Bishop and Hill model, 344
Bishop-Hill theory, 348
C
Cauchy’s equations of motion, 124
Cauchy stress space, 204
Cauchy stress tensor, 120
Center of mass, 8
Characteristic equation, 140
Chasles’ theorem, 10
Cleavage strength, 53
Cold drawing, 46
Combined isotropic-kinemaic hardening, 287
Compatibility conditions, 165
Considère criterion, 45, 321
Consistency condition, 299
Constitutive behavior, 10
Continuum mechanics, 3, 19
Contravariant, 169
Convex, 199, 207
Coulomb friction, 315
Couple, 17
Covariant, 169
Critical Resolved Shear Stress (CRSS), 341
Critical shear stress, 63
Crystal plasticity, 341
Curl, 153, 160
Curvilinear coordinate system, 167
Cylindrical coordinate system, 169
D
Deformable body dynamics, 4
Deformable body statics, 15
Deformation energy, 8
Deformation gradient, 180
Deformation theory, 309
Deviatoric plane, 145, 204, 206
Deviatoric stress, 205
Deviatoric stress tensor, 145, 147
Diffuse neck, 321
Diffuse necking, 50
Dilatational, 166
Dirac delta function, 38
Direction of cosine, 125
Dislocation, 55, 56
Displacement gradient, 173
Divergence, 153, 155
Divergence theorem, 155, 156
Dorn criterion, 317
Dot product, 135
Drawability, 334
Drucker isotropic yield function, 215
Drucker-Prager, 250
Drucker-Prager compressible isotropic yield
function, 228
Drucker-Prager isotropic yield function, 228
Drucker yield condition, 215
© Springer Nature Singapore Pte Ltd. 2018
K. Chung and M.-G. Lee, Basics of Continuum Plasticity,
https://doi.org/10.1007/978-981-10-8306-8
357
358
Drucker yield function, 219
Duality in normality rule, 232
Dual normality rules, 233
Dummy index, 124
Dyadic product, 135
Dynamically determinate, 13
Dynamically indeterminate, 13
Dynamics, 5
Dynamic work rate, 158
E
Effective (or equivalent) strain increment, 232
Effective plastic strain increment surface, 233
Effective (yield) stress, 34, 202, 216
Eigenvalues, 139
Eigenvectors, 139
Elastic modulus tensor, 22
Elastic unloading, 299
Engineering shear strains, 178
Engineering strain, 24, 29
Engineering stress, 24
Equations of motion, 124
Equivalent plastic strain rate, 191
Equivalent (yield) stress, 202
Equivoluminal, 166, 237
Euler-Bernoulli beam, 88
Eulerian, 188
Eulerian tensors, 189
F
Finite deformation theory, 309
Finite difference method, 160
Finite element method, 160
Finite strain tensor, 183
Force equilibrium, 124
Formability, 315
Forming limit, 51, 317
Fourier heat conduction law, 156
Fracture criterion, 316
Free index, 124
G
Generalized Hooke’s Law, 163
Gradient, 153
Green strain tensor, 183
H
Hardening, 287
Heaviside function, 38
Heterogeneous structure, 63
Hill criterion, 322
Hill 1948, See Hill criterion, 249 See also
Bishop and Hill model
Index
Hill 1948 quadratic anisotropic yield function,
272
Hollomon, J. H., 34
Homogeneous function, 201
Hookean elastic solid, 21
Hosford yield function, 222, 228, 326
Hydraulic bulge test, 144, 290
Hydrostatic line, 204
Hydrostatic stress, 145, 203
Hydrostatic stress tensor, 145
Hyper-elasticity, 26, 167
Hypo-elasticity, 167
I
Ideal forming theory, 306
Identity matrix, 125, 139
Identity tensor, 132
Imperfection, 55
Incompressibility, 203, 204, 235
Incompressible plasticity, 206
Incremental deformation theory, 303
Indicial notation, 124
Infinitesimal strain tensor, 21, 29, 173, 178
Instability, 43
Internal force, 6
Into hydrostatic, 144
Invariance of plastic strains, 332
Invariants, 137
Invariants of stress, 205
Inverse Hosford, 246
Inverse tensor, 132
Inverse Tresca, 246
Irrotational, 166
Isochoric, 237
Isotropic, 200
Isotropic hardening, 287, 291
Isotropic linear elasticity, 165
Isotropic yield functions, 209
Isotropy, 205, 239
J
Jacobian, 168
Jaumann, 311
K
Kelvin solid, 37
Kinematically admissible displacements, 159
Kinematic hardening, 287, 291
Kinetic energy, 8
Kronecker delta, 22, 125
L
Laboratory coordinate system, 200
Lagrangian, 188
Index
Lankford coefficient, 271, 348
Laplace transformation, 42
Laplacian, 170
Laplacian operator, 157
Latent hardening, 352
Left Cauchy-Green tensor, 181
Left stretch tensor, 180
Limit analysis, 99
Linear elastic, 21
Linear kinematic hardening, 293
Linear momentum, 5
Line defects, 56
Localization, 45
Localized neck, 322
Localized necking, 51
Lode angle, 147
Logarithmic strain, 28
Ludwick, P., 34
M
Marciniak-Kuczynski model, 324
Mass scaling, 167
Materially embedded coordinate system, 200,
209
Maxwell fluid, 37
Method of characteristics, 157
Minimum plastic work path, 303
Modified Drucker yield functions, 245
Mohr’s circle, 136, 138
Moment, 9
Multiplicative decomposition, 350
N
Natural strain, 28
Natural strain increment, 191
Necking, 26, 43
Neck propagation, 46
Newton’s (combined) first and second laws of
motion, 5
Newton’s third law, 6
Newtonian viscous fluid, 22
Nominal strain, 24, 29
Nominal stress, 24
Non-associate flow rule, 232
Nonlinear kinematic hardening, 294
Non-quadratic isotropic yield functions, 222
Non-quadratic yield functions, 283
Normal anisotropy, 255
Normality rule, 231, 278
Normal R-value, 271
O
Objective (or Jaumann) stress increment, 167
Orthogonal anisotropy, 258
359
Orthogonal tensor, 133
P
Particle mechanics, 4
Perfect plasticity, 34
Permanent deformation, 25
Phase velocity of the wave, 166
Physical plasticity, 53
p diagram, 204, 205, 223
Piola-Kirchhoff stress, 29
Piolar-Kirchhoff stress, 353
Planar isotopic, 261, 262
Planar isotropic, 255, 260
Planar R-value, 271
Plane strain, 273
Plane strain deformation, 240
Plane stress, 255
Plastic behavior, 25
Plastic potential, 231
Plastic strain increment function, 233
Plastic unloading, 300
Plastic work equivalence principle, 232
Point defects, 56
Poisson’s ratio, 22, 25
Polar moment of area, 112
Polycrystalline structure, 58
Positive definiteness, 264
Prager type, 293
Principal deviatoric stresses, 205
Principal directions, 141, 149
Principal values, 141, 149
Principle of moment of momentum, 124
Principle of virtual displacement, 158
Proportional true strain, 193
Pure bending, 73
Pure shear, 208
Q
Quadratic form, 263
R
Radius of curvature, 74
Rate-dependent crystal plasticity, 349
Rate of deformation tensor, 22, 28, 184, 185
Rate of twist, 111
Reference plastic strain increment, 240
Reference stress state, 203, 208
Resultant force, 17
Resultant moment, 17
Reverse bending, 80
Right Cauchy-Green tensor, 181
Right stretch tensor, 180
Rigid plasticity, 34, 305
Rotational inertia, 13
360
R-value, 271, 326
S
Sachs model, 343
Schmid factor, 342
Schmid law, 341
Second moment of the cross-section, 75
Self-consistent, 353
Side wall curl, 337
Simple compression, 32, 208
Simple shear, 194
Simple tension, 23, 30, 208
Slip system, 57, 341
Spatial gradient of velocity, 184
Spherical coordinate system, 170
Spin tensor, 185
Sprinback, 317
Springback, 315, 335
Statically determinate, 18, 100
Statically indeterminate, 18, 100
Statics, 5
Steady state, 157
Stokes’ theorem, 161
Strain-based forming limit diagram, 330
Strain hardening exponent, 45
Strain localization, 49, 317
Strain-rate sensitivity, 48
Strain-rate sensitivity exponent, 48, 288
Stress, 119
Stress rate, 311
Stress tensor, 21
Summation convention, 124, 127
Superposition principle, 27
Surface defects, 58
Swift, H. W., 34
Swift criterion, 321
Symmetric, 132
Symmetric elastic modulus tensor, 162
T
Talyor model, 343
Tensors, 131
The infinitesimal rotation tensor, 178
Timoshenko beam, 88
Torsion, 111
Trace of a tensor, 133
Index
Traction vector, 125
Transformation laws, 134
Transient, 157
Transient behavior, 291
Transpose of a tensor, 132
Tresca, 243
Tresca isotropic yield function, 211
Tresca yield surface, 212
Triaxiality, 331
True strain, 28
True strain tensor, 191
Twining induced plasticity (TWIP), 50
Two yield surfaces, 295
U
Ultimate Tensile Strength (UTS), 24
Updated Lagrangian formulation, 302
V
Virtual displacements, 159
Virtual work, 159
Virtual work principle, 155, 156, 158, 159
Viscoelasticity, 36
Voce, E., 34
von Mises, 241
von Mises isotropic yield function, 207
von Mises yield condition, 209
von Mises yield function, 222
W
Wave equations, 166
Work rate, 155, 156
Work rate for deformation, 158
X
X-EPS diagram, 331
Y
Yield function, 199
Yield stress, 24, 25
Yield surface, 199
Young’s modulus, 22, 25
Z
Ziegler type, 293