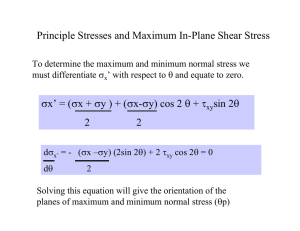
2.2 Stress transformation 2.2.1 2D stress transformation y y' a) given stress components b) transformed stress components σ y'y' τ y'x' τ x'y' σyy τyx σ x'x' τxy σxx +θ x σxx τxy x' x σ x'x' τyx τ x'y' τ y'x' σyy σ y'y' y' c) force equilbrium resultant force components of σ acting on dA xx x = dAx'cosθ: dAx θ F = σxxdAx'cosθ θ σxxdAx'cosθ θ Fy' = (σxxdAx'cosθ) sinθ resultant force components of τ acting on dA x x' dA x' σ x'x' θ τxydAx'cosθ Fx' = (σxxdAx'cosθ)cosθ xy dA x' τ x'y' τyxdAx'sinθ = dAx'cosθ: x dAx' θ dAy θ σyydAx'sinθ Fx' = (τxydAx'cosθ) sinθ F = τxydAx'cosθ Fy' = (τxydAx'cosθ) cosθ θ Figure 7: plane stress transformation Each material point x within a structure subjected to a certain loading scenario has a clearly defined state of stress σ(x). This state of stress can be represented by nine stress components with respect to the x, y, z coordinate system given in Eq. 11 or considering the 2D case by four stress components shown in Fig. 7a). However, the same state of stress can be alternatively represented with respect to another coordinate system, e.g. the x� , y � coordinate system shown in Fig. 7b). The stress components with respect to the x, y coordinate system can be transformed to equivalent stress components with respect to the x� , y � coordinate system by considering the force equilibrium of the resultants of all stress components acting on the triangular differential 11 area element illustrated in Fig. 7c): � Fx� = 0 = σx� x� dAx� − (σxx dAx� cos θ) cos θ − (τxy dAx� cos θ) sin θ − (σyy dAx� sin θ) sin θ − (τyx dAx� sin θ) cos θ ⇒ σx� x� = σxx cos2 θ + σyy sin2 θ + τxy 2 cos θ sin θ � Fy� = 0 = τx� y� dAx� + (σxx dAx� cos θ) sin θ − (τxy dAx� cos θ) cos θ − (σyy dAx� sin θ) cos θ + (τyx dAx� sin θ) sin θ � � ⇒ τx� y� = (σyy − σxx ) cos θ sin θ + τxy cos2 θ − sin2 θ where components σx� x� and τx� y� are acting on dAx� , σxx and τxy on dAx = dAx� cos θ and σyy and τyx on dAy = dAx� sin θ. Rearranged using the trigonometric identities cos2 θ = (1 + cos 2θ)/2, sin2 θ = (1 − cos 2θ)/2 and 2 cos θ sin θ = sin 2θ we arrive at σx� x� = σxx + σyy σxx − σyy + cos 2θ + τxy sin 2θ 2 2 τ x� y � = − σxx − σyy sin 2θ + τxy cos 2θ 2 (12) (13) and similarily we obtain σy � y � = σxx + σyy σxx − σyy − cos 2θ − τxy sin 2θ 2 2 (14) Note: θ is the angle enclosed by x and x� where counter-clockwise is positive. 2.2.2 Maximum and minimum principal stresses and maximum shear stress (2D) Clearly, the stress component magnitudes of σx� x� , σy� y� and τx� y� depend on the angle θ. The maximum and minimum normal stresses are computed by maximizing Eq. (12) with respect to orientation angle θ: dσx� x� =0 dθ (15) giving tan 2θp = 2τxy σxx − σyy (16) 12 Figure 8: a) Specimen made of cast iron subjected to tension failing due to maximum normal stress; b) Specimen made of mild steel subjected to tension failing due to maximum shear stress which has two possible solutions θp1 and θp2 = θp1 ± 90o marking the orientation of the principal stress axes. Substituting the cosine and sine of 2θp1 and 2θp2 into Eq. (12) and making use of the adequate trigonometric considerations (see chapter 9.3 in Hibbeler [2013]) the principal stresses are calculated as σ1,2 σxx + σyy ± = 2 �� σxx − σyy 2 �2 2 . + τxy (17) A stress represented with respect to the principal axes or equivalently, acting on the principal planes, has zero shear stress components. Similarly, there is a specific coordinate system axis orientation where the magnitude of the shear stress is maximized. The so-called maximum in-plane shear stress is computed by maximizing Eq. (13) with respect to orientation angle θ: dτx� y� =0 dθ (18) giving tan 2θs = − σxx − σyy 2τxy (19) which has two possible solutions θs1 and θs2 = θs1 ± 90o . Substituting the cosine and sine of either 2θs1 or 2θs2 into Eq. (13) and making use of the adequate trigonometric considerations (see chapter 9.3 in Hibbeler [2013]) the maximum in-plane shear stress is calculated as max τin−plane = �� σxx − σyy 2 �2 2 + τxy (20) 13 max where τin−plane occurs on planes at 45o to principal planes, i.e. θs = θp ± 45o . The maximum in-plane shear stress acting on the maximum shear plane is accompanied by the so-called average stress σavg = σxx + σyy 2 (21) Note: The average stress is a so-called stress invariant, i.e. it has the same value for any coordinate system orientation. max A stress state of pure shear is given, if τin−plane = ±τ , σ1,2 = ±τ and σavg = 0. Failure in a structure occurs either at planes of principal stresses or maximum shear stress as illustrated in Fig. 8 for a specimen subjected to tension. Brittle failure is due to the maximum normal stress occurring on the vertical cross section plane and ductile failure is due to the maximum shear stress occurring on a plane rotated by 45o to the vertical. 2.2.3 Mohr’s circle A graphical method of plane stress (2D) transformation is using Mohr’s circle named after Otto Mohr. Mohr’s circle is constructed in a σ-τ stress coordinate system where the positive σ-axis points horizontally to right and the positive τ -axis vertically downwards as illustrated in Fig. 9a). With a plane stress state given by corresponding normal and shear stress components σxx , σyy and τxy , respectively, as shown in Fig. 9b) its center has the coordinates C(σavg , 0) where the average normal stress is given by Eq. (21). Its radius is obtained from rearranging and combining Eqs. (12) and (13) arriving at �� �2 σxx − σyy 2 R= + τxy (22) 2 The stress transformation angle θ is measured from the reference line CA counter-clockwise to line CP as 2θ in Mohr’s circle where A(σxx , τxy ) denotes the reference point referring to the given stress components and P (σx� x� , τx� y� ) denotes the point referring to the transformed stress components also shown in Fig. 9e). Points lying on opposite sides of the circle, i.e. by an angle of 2θ = 180o apart, belong to the same stress components representation of a stress state, e.g. A(σxx , τxy ) and G(σyy , −τxy ) or P (σx� x� , τx� y� ) and Q(σy� y� , −τx� y� ). The principal stress components σ1,2 depicted in Fig. 9c) are found at the intersection points of the circle with σ-axis and its orientation with respect to the given stress components representation, i.e. angles θp1 and θp2 , is determined from trigonometric consideration. max shown in Fig. 9d) is found at intersection points The maximum in-plane shear stress τin−plane of the circle with with a line through C and parallel to τ -axis (i.e at top or bottom of circle) and its orientation with respect to the given stress components representation, i.e. angles θs1 and θs2 , is again determined from trigonometric consideration. Mohr’s circle is a 2D-transformation method and is only admissible for 3D-stress state components associate with planes where both normal and shear stresses correspond to each other: � both normal stresses are not principal stresses, because they are associated with a shear stress � both normal stresses are principal stresses (and there is no shear stress) 14 Figure 9: plane stress transformation using Mohr’s circle 2.2.4 Principal and absolute maximum shear stress state (3D) with respect to orientation angle θ In 3D we find a maximum, intermediate and minimum principal stress, the so-called triaxial stress state as shown in Fig. 10. A special case is the isotropic or hydrostatic stress state where regardless of orientation only normal stresses are found which are equal σ1 = σ2 = σ3 = σ. In a fluid, this is the pressure of the fluid. For given the maximum, intermediate and minimum principal stresses the absolute maximum shear stress is obtained by abs τmax = σmax − σmin 2 15 Figure 10: 3D principal stress state (triaxial stress state) Figure 12: x� − y � -plane principal stress state - abs τmax out-of plane (σ3 = 0 = σmin ) Figure 11: absolute maximum shear stress abs = τ � � - 45o rotation about y � state τmax x ,z (σint -direction) Figure 13: x� − y � -plane principal stress abs in-plane (σ = 0 = σ ) state - τmax 3 int and the the average normal stress can be computed as σavg = σmax + σmin . 2 The maximum in-plane shear stress found at a plane associated with σmax and σmin is the soabs called absolute maximum shear stress τmax depicted in Fig. 10. Triaxial stress state and absolute maximum shear stress orientations are linked by a rotation of 45o about the σint direction, i.e. the y � -axis. In this sense, only the x� − z � stress plane is transformed but not the x� − y � and y � − z � plane, i.e. x� − y � and y � − z � planes still represent principal stress planes and so, τx� y� = τy� z� = 0 For a plane state of stress it holds σ3 = 0 (see Figs. 12,13) and we find: abs � τmax does not act in this plane (i.e. out-of plane), if σ1,2 have same sign, i.e. σ1 > 0 and σ2 > 0 or σ1 < 0 and σ2 < 0 and thus σ3 = σmin or σmax , respectively 16 abs � τmax acts in-plane, if have opposite sign, i.e. σ1 > 0 and σ2 < 0 and thus σ3 = σint The equivalent stress or von Mises stress is the magnitude of the deviatoric stresses causing only distortion but no volume change: σe = � � � 1 � (σ1 − σ2 )2 + (σ2 − σ3 )2 + (σ3 − σ1 )2 = 3I2 = σy 2 17 (23)