Chapter 2. Signals and
Linear Systems
Essentials of Communication Systems Engineering
John G. Proakis and Masoud Salehi
Real and Complex Signals
◼
Real signals
◼
◼
◼
Takes values in set of real numbers
x(t) R
Complex signals
◼
◼
◼
Takes values in set of complex numbers
x(t) C
In communications
Convey amplitude and phase information
Represented by two real signals
▪ Real and imaginary parts
▪ Absolute value (= magnitude) and phase
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
2
Representation of Complex signals (example 2.1.3)
◼
◼
x(t ) = Ae j ( 2f 0t + )
signal :
◼
Complex signals
◼
From Euler’s relation : e j = cos + j sin
xr (t ) = A cos(2f 0t + )
real part :
imaginary part :
xi (t ) = A sin (2f 0t + )
◼
Absolute value of x(t) : x(t ) = xr2 (t ) + xi2 (t ) = A
◼
Its phase : x(t ) = 2f 0t +
Figure 2.8
Representation of complex signals
xr (t ) = x(t ) cos (x(t ) )
x(t ) = x (t ) + x (t )
2
r
2
i
xi (t ) = x(t ) sin (x(t ) )
x(t ) = arctan
xi (t )
xr (t )
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
3
Euler’s formula
x x 2 x3 x 4
e = 1+ + + + +
1! 2! 3! 4!
x x3 x5 x 7
sin x = − + −
1! 3! 5! 7!
x2 x4 x6
cos x = 1 − + −
2! 4! 6!
e jx = cos x + j sin x
x
2
jx
x
e jx = 1 + − −
1! 2!
x2 x4
= 1 − +
2! 4!
jx 3 x 4 jx 5
+ +
3! 4! 5!
x x3 x5
+ j − +
1! 3! 5!
Girolamod Cardano,1501-1576
Rene Descartes, 1596-1650
Leonhard Euler, 1707-1783
Carl Friedrich Gauss,1777-1855
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
4
Deterministic and Random Signals
◼
Deterministic signals
At any time instant t, the value of x(t) is given as a real
or a complex number
◼ Model : Completely specified functions of time
◼
◼
Random (Stochastic) signals
At any time instant t, the value of x(t) is a random
variable
◼ Defined by a probability density function
◼ Model : Probability model
◼
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
5
Energy-Type and Power-Type Signals
◼
Energy signal
◼
For any signal x(t), the energy content of the signal is defined by
Ex =
−
◼
T /2
x(t ) dt = lim
2
T → −T / 2
Power signal
◼
For any signal x(t), the power content of the signal is defined by
1
Px = lim
T → T
◼
2
x(t ) dt
For real signal,
T /2
−T / 2
2
x(t ) dt
2
2
x(t ) is replaced by x (t )
◼
A signal is an energy-type signal if and only if Ex is finite
◼
A signal is an power-type signal if and only if Px is finite
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
6
Example 2.1.10
◼
The energy content of x(t ) = A cos (2f 0t + )
T /2
E x = lim
T → −T / 2
◼
◼
x(t ) dt = lim
2
T /2
T → −T / 2
A2 cos 2 (2f 0t + )dt =
Therefore, this signal is not an energy-type signal
However, the power of this signal is
1 T /2
1 T /2 2
2
2
x
(
t
)
dt
=
lim
A
cos
(2f 0t + )dt
T → T −T / 2
T → T −T / 2
1 T / 2 A2
1 + cos( 4f 0t + 2 )dt
= lim
T → T −T / 2 2
T /2
A2T A2
= lim
+
cos( 4f 0t + 2 )
T → 2T
8f 0t
−T / 2
A2
=
2
A2
Hence, x(t) is a power-type signal and its power is
2
Px = lim
◼
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
7
Sinusoidal Signal & Complex Exponential Signal
◼
Sinusoidal signals
Definition : x (t ) = A cos (2f t + )
0
◼
A : Amplitude
f0 : Frequency
: Phase
Period : T0 = 1/f0
◼
Figure 2.6
◼
◼
◼
◼
Complex exponential signal
j ( 2f 0t + )
Definition : x (t ) = Ae
◼
◼
◼
◼
A : Amplitude
f0 : Frequency
: Phase
Figure 2.8
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
8
Unit Step, Rectangular & Triangular Signal
◼
Unit step signal
Definition
◼
◼
◼
◼
The unit step multiplied by any signal produces a “causal version” of the signal
Note that for positive a, we have
Figure 2.9
Rectangular pulse
Definition
◼
◼
1 t 0
u−1 (t ) =
0 t 0
1 − 12 t 12
(t ) =
0 otherwise
Figure 2.13
Triangular Signal
t +1 −1 t 0
Definition
(t ) = − t + 1 0 t 1
0
otherwise
◼ Figure 2.15
◼ (t ) = (t ) * (t )
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
9
Sinc & Sign or Signum Signal
◼
◼
Sinc signal
sin(t )
t0
sinc (t ) = t
1
t =0
Definition
The sinc signal achieves its maximum of 1 at t = 0.
The zeros of the sinc signal are at t = 1, 2, 3,
Figure 2.17
Sign or Signum signal
1 t 0
sgn( t ) = − 1 t 0
0 t =0
Definition :
Sign of the independent variable t
Can be expressed as the limit of the signal xn(t)
when n →
−t
Figure 2.18
e n
nt
xn (t ) = − e
0
t 0
t0
t =0
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
10
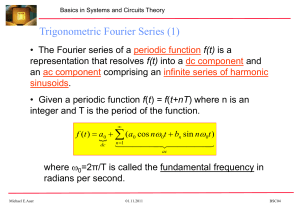
Fourier Series
◼
LTI systems
◼
◼
Model of a large number of building blocks in a communication system
Some basic components of transmitters and receivers
▪ Such as filters, amplifiers, and equalizers
◼
Convolution integral : Input and output relation of an LTI system :
+
+
−
−
y (t ) = h( ) x(t − )d = h(t − ) x( )d
h(t) : Impulse response of the system
Basic tool for analyzing LTI systems
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
11
Fourier Series
Major drawbacks of convolution integral
1.
2.
◼
Straightforward method to obtain the output, but is not always an
easy task
Not provide good insight into what the system really does
Another approach to analyzing LTI systems
◼
Basic idea
◼
◼
Expand the input as a linear combination of some basic signals
Employ the linearity properties of the system to obtain the
corresponding output
Easier than a direct computation of the convolution integral
Provide better insight into the behavior of LTI systems
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
12
Fourier Series and Its Properties
◼
Dirichlet conditions
Conditions for x(t) to be expanded in terms of complex exponential
j 2 t +
}n =−
signals {e
◼
x(t) : A periodic signal with period T0
T0
x(t) is absolutely integrable over its period, i.e., x(t ) dt
◼
n
T0
1.
2.
3.
◼
0
The number of maxima and minima of x(t) in each period is finite
The number of discontinuities of x(t) in each period is finite
Fourier series
x(t ) =
x e
n = −
n
j 2
n
t
T0
1
xn =
T0
T0
2
T
− 0
2
− j 2
x(t )e
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
n
t
T0
dt
13
Fourier Series and Its Properties
◼
Observations concerning Fourier series
◼
The coefficients xn are called the Fourier-series coefficients of the signal x(t)
◼
The Dirichlet conditions are only sufficient conditions for the existence of the
Fourier series expansion
◼
These are generally complex numbers (even when x(t) is a real signal)
For some signals that do not satisfy these conditions, we can still find the Fourier
series expansion
The quantity f0 = 1/T0 is called the fundamental frequency of the signal x(t)
The frequencies of the complex exponential signals are multiples of this
fundamental frequency
The nth multiple of f0 is called the nth harmonic
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
14
Response of LTI Systems to Periodic Signals
If h(t) is the impulse response of the system, that the response to the
exponential ej2f0t is H( f0) ej2f0t
+
H ( f ) = h(t )e − j 2ft dt
−
x(t) , the input to the LTI system, is periodic with period To and has a
Fourier-series representation
x(t ) =
x e
n = −
j 2
n
t
T0
n
Response of LTI systems
n
j 2 t
y (t ) = Lx(t ) = L xn e T0
n = −
=
x
n = −
j 2
n
L[e
n
t
T0
n j 2 T0 t
] = xn H e
n = −
T0
n
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
+
H ( f ) = h(t )e − j 2ft dt
−
15
Example 2.2.1
◼
x(t) : Periodic signal depicted in Figure 2.25 and described analytically by
x(t ) =
t − nT0
n = −
+
: A given positive constant (pulse width)
Determine the Fourier series expansion
◼
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
16
Example 2.2.1
◼
Solution
Period of the signal is T0 and
1
xn =
T0
=
+T0 / 2
−T0 / 2
− jn
x(t )e
n
1
sin
n T0
2
t
T0
1
dt =
T0
+ / 2
− /2
n
= sin c
T0
T0
− jn
1e
2
t
T0
− jn
+ jn
1 T0
T0
dt =
[e
− e T0 ] n 0
T0 − jn 2
e j − e − j
where we have used the relation sin =
2j
◼
For n = 0, the integration is very
simple and yields x0 = / T0
Therefore
Figure 2.26 : Graph of these Fourier
series coefficients
n
x(t ) = sin c
n = − T0
T0
+
2t
jn T0
e
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
17
Positive and Negative Frequencies
◼
Fourier series expansion of a periodic
signal x(t)
◼
◼
All positive and negative multiples of
the fundamental frequency 1/T0 are
present
Positive frequency : e jt
◼
◼
x e
n = −
j 2
n
t
T0
n
Phasor rotating counterclockwise at an
angular frequency
Negative frequency : e − jt
◼
x(t ) =
Phasor rotating clockwise at an angular
frequency
Figure 2.29
Real signals
Positive and negative frequencies pairs
with amplitudes that are conjugates
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
18
Fourier Series for Real Signals
◼
Real signal x(t)
x− n =
◼
◼
◼
1
T0
+T0
j 2
x(t )e
n
t
T0
1
dt =
T0
+T0
− j 2
x(t )e
n
t
T0
*
dt = xn*
The positive and negative coefficients are conjugates
|xn| : Even symmetry (|xn| = |x-n| )
xn : Odd symmetry (xn = - x-n) with respect to the n = 0 axis
Figure 2.30 Discrete spectrum of a real-valued signal.
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
19
FOURIER TRANSFORM
◼
From Fourier Series to Fourier Transforms
◼
The spectrum of nonperiodic signals covers a
continuous range of frequencies
Then the Fourier transform (or Fourier integral) of x(t), defined by
+
X ( f ) = x(t )e − j 2ft dt
−
The original signal can be obtained from its Fourier transform by
+
x(t ) = X ( f )e j 2ft df
−
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
20
FOURIER TRANSFORM
◼
The following observations concerning the Fourier transform
◼
X(f) is generally a complex function
The function X(f) is sometimes referred to as the spectrum of
the signal x(t)
X(f) If the variable in the Fourier transform is w rather than f, then
+
X ( ) = x(t )e
−
◼
− jt
dt
1
x(t ) =
2
+
−
X ( )e jt d
The Fourier-transform and the inverse Fourier-transform relations
+
+
+
+
+
x(t ) = x( )e − j 2f d e j 2ft df = e j 2f (t − ) df x( )d = (t − ) x( )d
−
−
−
−
−
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
21
Fourier Transform of Real, Even, and Odd Signals
◼
*
For real x(t), the transform X(f) is a Hermitian function: X (− f ) = X ( f )
ReX (− f ) = ReX ( f ) ImX (− f ) = − ImX ( f )
X (− f ) = X ( f )
X (− f ) = −X ( f )
Figure 2.36 Magnitude and phase of the spectrum of a real signal.
◼
◼
If, in addition to being real, x(t) is an even signal : the Fourier
transform X(f) will be real and even
If x(t) is real and odd : the real part of its Fourier transform
vanishes and X( f ) will be imaginary and odd
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
22
Basic Properties of the Fourier Transform
◼
Theorem : Linearity
x(t ) X ( f )
and
y (t ) Y ( f )
ax(t ) + by(t ) aX ( f ) + bY ( f )
◼
Theorem : Duality
x(t ) X ( f )
X (t ) x(− f ) and
X (−t ) x( f )
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
23
Basic Properties of the Fourier Transform
◼
Theorem : Shift in Time Domain
x(t ) X ( f )
◼
Theorem : Scaling
x(t ) X ( f )
x(t − t0 ) e − j 2ft0 X ( f )
1 f
x(at ) X
a a
If we expand a signal in the time domain, its frequency-domain
representation (Fourier transform) contracts
If we contract a signal in the time domain, its frequency domain
representation expands
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
24
Basic Properties of the Fourier Transform
◼
Theorem : Convolution
x(t ) X ( f )
and
y (t ) Y ( f )
x(t ) * y (t ) X ( f )Y ( f )
This theorem is the basis of the frequency-domain analysis of LTI
systems.
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
25
Basic Properties of the Fourier Transform
◼
Theorem : Modulation
F x(t )e
j 2f 0t
=
+
−
x(t )e j 2f 0t e − j 2ft df
+
= x(t )e − j 2t ( f − f 0 ) df
−
= X ( f − f0 )
◼
The modulation theorem states that a multiplication in
the time domain by a complex exponential results in a
shift in the frequency domain
◼
A shift in the frequency domain is usually called
modulation
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
26
Example 2.3.14
◼
◼
Determine the Fourier transform of the signal x(t ) cos( 2f 0t )
Solution
1
1
1
1
F x(t ) cos( 2f 0t ) = F x(t )e j 2f t + x(t )e − j 2f t = X ( f − f 0 ) + X ( f + f 0 )
0
2
0
2
2
2
Figure 2.38 Effect of
modulation in both the
time and frequency
domain.
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
27
Basic Properties of the Fourier Transform
◼
Theorem : Parseval’s Relation
If
the Fourier transforms of the signals x(t) and y(t) are
denoted by X(f) and Y(f) respectively, then
−
Note
x(t ) y (t )dt = X ( f )Y * ( f )dt
−
that if we let y(t) = x(t) , we obtain
−
◼
*
x(t ) dt =
2
−
2
X ( f ) dt
This is known as Rayleigh's theovem and is similar to Parseval's
relation for periodic signals
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
28
Basic Properties of the Fourier Transform
◼
Theorem : Autocorrelation
◼
The (time) autocorrelation function of the signal x(t) is
denoted by Rx() and is defined by
Rx ( ) = x(t ) x* (t − )dt
−
◼
The autocorrelation theorem states that
F Rx ( ) = X ( f ) 2
Rx ( ) = x( ) x* (− )
◼
The Fourier transform of the autocorrelation of a signal
is always a real-valued, positive function
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
29
Fourier Transform Pairs
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
30
Fourier Transform Properties
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
31
Energy-Type Signals
◼
For an energy-type signal x(t), we define the autocorrelation function
Rx ( ) = x( ) x (− ) = x(t ) x (t − )dt = x(t + ) x* (t )dt
*
*
−
−
E x = x(t ) dt = Rx (0)
2
−
◼
If we pass the signal x(t) through a filter with the (generally complex)
impulse response h(t) and frequency response H(f )
◼
◼
◼
The output will be y(t) = x(t)*h(t)
In the frequency domain Y(f) = X(f)H(f)
To find the energy content of the output signal y(t) , we have
Ey =
−
y (t ) dt = Y ( f ) dt =
2
−
2
−
X ( f ) H ( f ) dt = R y (0)
2
2
where R y ( ) = y ( ) y * (− ) is the autocorrelation function of the output
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
32
Energy-Type Signals
◼
The inverse Fourier transform of |Y(f)|2 is
= F X ( f ) H ( f )
X ( f ) * F H ( f )
R y ( ) = F −1 Y ( f )
= F −1
2
2
= Rx ( ) * Rh ( )
◼
−1
2
−1
2
2
Ry ( ) = Rx ( ) * Rh ( )
let us assume that
1 W f W + W
H( f ) =
otherwise
0
X ( f ) 2 W f W + W
2
2
2
Y( f ) =
Ey =
Y ( f ) dt X (W ) W
−
0
otherwise
This filter passes the frequency components in a small interval around f =
W, and rejects all the other components
Therefore, the output energy represents the amount energy located in the
vicinity of f = W in the input signal
◼
◼
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
33
Energy-Type Signals
◼
This means that |X(W)|W is the amount of energy in x (t), which is
located in the bandwidth [W, W+W]
Energy in [W , W + W ] bandwidth
X (W ) =
W
2
◼
This shows
why |X(f)|2 is called the energy spectral density of a signal x(t)
why it represents the amount of energy per unit bandwidth present in
the signal at various frequencies.
◼
We define the energy spectral density (or energy spectrum) of the
signal x(t) as
g x ( f ) = X ( f ) = F Rx ( )
2
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
34
Energy-Type Signals – Summary
1.
2.
3.
For any energy-type signal x(t) , we define the autocorrelation function
Rx() = x()x*(-)
The energy spectral density of x(t), denoted by gx(f), is the Fourier
transform of Rx(). It is equal to |X(f)|2
The energy content of x(t), Ex, is the value of the autocorrelation
function evaluated at = 0 or, equivalently, the integral of the energy
spectral density over all frequencies, i.e.,
E x = x(t ) dt = Rx (0) = g x ( f )df
2
−
4.
−
If x(t) is passed through a filter with the impulse response h(t) and the
output is denoted by y(t) , we have
y (t ) = x(t ) * h(t )
R y ( ) = Rx ( ) * Rh ( )
g y ( f ) = g x ( f ) g h ( f ) =| X ( f ) |2 | H ( f ) |2
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
35
Power-Type Signals
◼
Define the time-average autocorrelation function of the power-type signal x(t) as
1 T /2
Rx ( ) = lim x(t ) x* (t − )dt
T → T −T / 2
1 T /2
2
Px = lim
x(t ) dt = Rx (0)
T → T −T / 2
◼
We define Sx(f ), the power-spectral density or the power spectrum of the signal
x(t) , to be the Fourier transform of the time-average autocorrelation function:
S x ( f ) = F Rx ( )
+
Rx (0) = S x ( f )e
−
j 2f
df
+
=0
= S x ( f )df
−
+
Px = Rx (0) = S x ( f )df
−
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
36
Power-Type Signals
◼
If a power-type signal x(t) is passed through a filter with impulse response h(t), the output
is
+
y (t ) = x( )h(t − )d
−
◼
The time-average autocorrelation function for the output signal is
1 T /2
*
y
(
t
)
y
(t − )dt
T → T −T / 2
1 T /2
R y ( ) = lim h(u ) x(t − u )du h* (v) x* (t − − v)dv dt
−
T → T −T / 2
−
R y ( ) = lim
◼
By making a change of variables w = t - u and changing the order of integration, we
obtain
T
R y ( ) =
=
− −
− −
1
T → T
h(u )h* (v) lim
x(w) x (u + w − − v)dwdudv
2
+u
*
− T2 −u
Rx ( + v − u )h(u )h* (v)dudv
Rx ( + v) h( + v)h* (v)dudv
−
=
= Rx ( ) h( ) h* (− )
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
37
Power-Type Signals
◼
Taking the Fourier transform of both sides of this equation, we
obtain
2
*
S y ( f ) = S x ( f ) H ( f ) H ( f ) = S x ( f ) X ( f ) Typo !!
◼
◼
This relation between the input-output power-spectral densities is the same
as the relation between the energy-spectral densities at the input and the
output of a filter.
Now we can use the same arguments used for the case of
energy-spectral density
◼
That is, we can employ an ideal filter with a very small bandwidth, pass
the signal through the filter, and interpret the power at the output of this
filter as the power content of the input signal in the passband of the filter
Thus, we conclude that Sx(f) , as just defined, represents the amount of
power at various frequencies.
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
38
Power-Type Signals
◼
Let us assume that the signal x(t) is a periodic signal with the period To and has
the Fourier-series coefficients {xn}
To find the time-average autocorrelation function, we have
1 + T2
1 + kT20
*
*
Rx ( ) = lim T x(t ) x (t − )dt = lim
x
(
t
)
x
(t − )dt
kT
T → T − 2
k → kT − 20
0
k
= lim
T → kT
0
◼
+
T0
2
1
x
(
t
)
x
(
t
−
)
dt
=
− T20
T0
*
+
T0
2
T
− 20
x(t ) x* (t − )dt
This relation gives the time-average Autocorrelation function for a periodic signal
If we substitute the Fourier-series expansion of the periodic signal in this relation, we
obtain
m
n−m t
1 + T20 + +
* j 2 j 2
Rx ( ) =
Rx ( ) =
◼
◼
T0
x x
+
n = −
T
− 20
n = − m = −
2
xn e
j 2
n m
e
T0
e
T0
dt
n
T0
1
T0
+
T0
2
T
− 20
e
j 2 nT−m t
0
dt = mn
The time-average autocorrelation function of a periodic signal is itself periodic
It has with the same period as the original signal, and its Fourier-series coefficients are
magnitude squares of the Fourier-series coefficients of the original signal
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
39
Power-Type Signals
To determine the power-spectral density of a periodic signal, we can simply
find the Fourier transform of Rx(t)
◼
◼
◼
Since we are dealing with a periodic function, the Fourier transform consists of
impulses in the frequency domain
The power is concentrated at discrete frequencies (the harmonics)
Thus, the power spectral density of a periodic signal is given by
Sx ( f ) =
◼
◼
◼
n = −
To find the power content of a periodic signal, we must integrate this relation over
the whole frequency spectrum
Px =
When we do this, we obtain
x
n = −
2
n
If this periodic signal passes through an LTI system with the frequency response
H( f ), the output will be periodic and the power spectral density of the output can be
obtained by employing the relation between the power spectral densities of the input
and the output of a filter
2
n
n
n
2
S x ( f ) = H ( f ) xn f − = xn H f −
T0 n = −
T0
n = −
T0 2
The power content of the output signal is
n
2
Py = xn H
n = −
T0
2
◼
n
2
xn f −
T0
2
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
40
LOWPASS AND BANDPASS SIGNALS
◼
Lowpass signal
◼
A signal in which the spectrum (frequency content) of the signal is located
around the zero frequency
◼
Bandpass signal
◼
A signal with a spectrum far from the zero frequency
◼
The frequency spectrum of a bandpass signal is usually located around a
frequency fc
◼
fc is much higher than the bandwidth of the signal (recall that the
bandwidth of a signal is the set of the range of all positive frequencies
present in the signal)
◼
The bandwidth of the bandpass signal is usually much less than the
frequency fc, which is close to the location of the frequency content
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
41
BANDPASS SIGNALS
◼
◼
The extreme case of a bandpass signal is a single frequency signal
whose frequency is equal to fc
The bandwidth of this signal is zero, and generally, it can be written as
x(t ) = A cos( 2f c t + )
◼
This is a sinusoidal signal that can be represented by a phasor
xl = Ae j
A is assumed to be positive
The range of is -n to n, as shown in Figure 2.50.
Figure 2.50 Phasor corresponding
to a sinusoidal signal
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
42
BANDPASS SIGNALS
◼
◼
The phasor has a magnitude of A and a phase of
If this phasor rotates counterclockwise with an angular velocity of c =
2fct (equivalent to multiplying it by ej2fct), the result would be Aej(2fct+)
◼
Its projection on the real axis (its real part) is x(t) = A cos(2fct+ )
◼
We can expand the signal x(t) as
x(t ) = A cos( 2f ct + ) = A cos( ) cos( 2f ct ) − A sin( ) sin( 2f ct )
= xc cos( 2f ct ) − xs sin( 2f ct )
◼
This single-frequency signal has two components
The first component is xc = A cos( ) in the direction of cos( 2f c t )
◼
This is called the in-phase component
The other component is xs = A sin( ) in the direction of − sin( 2f c t )
◼
This is called the quadrature component.
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
43
BANDPASS SIGNALS
◼
xl = Ae j
◼
We have a phasor with slowly varying magnitude and phase
xl (t ) = A(t )e j (t )
where A(t) and (t) are slowly varying signals (compared to fc)
x(t ) = Re[ A(t )e j ( 2f t + (t )) ]
= A(t ) cos( (t )) cos( 2f c t ) − A(t ) sin( (t )) sin( 2f c t )
= xc (t ) cos( 2f c t ) − xs (t ) sin( 2f c t )
c
◼
◼
◼
Unlike the single frequency signal previously studied, this signal
contains a range of frequencies
Therefore, its bandwidth is not zero
However, since the amplitude (also called the envelope) and the
phase are slowly varying, this signal's frequency components
constitute a small bandwidth around fc
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
44
BANDPASS SIGNALS
◼
The spectra of three bandpass signals are shown in Figure 2.51
Figure 2.51 Spectra of three
bandpass signals.
◼
◼
The in-phase and quadrature components are
xc (t ) = A(t ) cos( (t )) xs (t ) = A(t ) sin( (t ))
x(t ) = xc (t ) cos( 2f c t ) − xs (t ) sin( 2f c t )
Both the in-phase and quadrature components of a bandpass signal are
slowly varying signals; therefore, they are both lowpass signals
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
45
BANDPASS SIGNALS
◼ x(t ) = xc (t ) cos( 2f c t ) − xs (t ) sin( 2f c t )
◼ A very useful relation
◼ A bandpass signal can be represented in terms of two lowpass signals,
namely, its in-phase and quadrature components
◼ The complex lowpass signal xl (t ) = xc (t ) + jx s (t )
is called the lowpass equivalent of the bandpass signal x(t)
◼ If we represent xl(t) in polar coordinates, we have
xl (t ) = x (t ) + x (t )e
2
c
◼
2
s
If we define the envelope and the phase of the bandpass signal as
xl (t ) = A(t ) = xc2 (t ) + xs2 (t )
◼
◼
x (t )
c
j arctan xs ( t )
xl (t ) = (t ) = arctan xxcs ((tt ))
We can express xl(t) as xl (t ) = A(t )e j (t )
x(t ) = Re[ xl (t )e j 2f ct ] = Re[ A(t )e j 2f ct + (t ) ] = A(t ) cos( 2f ct + (t ))
x(t ) = xc (t ) cos( 2f c t ) − xs (t ) sin( 2f c t )
Two methods for expressing a bandpass signal in terms of two lowpass
signals
Expression of the signal in terms of the in-phase and quadrature
components or in terms of the envelope and phase of the bandpass signal
Essentials of Communication Systems Engineering by John G. Proakis and Masoud Salehi
46