KUMARAGURU COLLEGE OF TECHNOLOGY
COIMBATORE – 641049
Department of Information Technology
LABORATORY RECORD
U18ITI2201L – Digital Logic and Microprocessor Laboratory
Regulation 2018
NAME
:
ROLL NO
:
YEAR / SEM
:
KUMARAGURU COLLEGE OF TECHNOLOGY
COIMBATORE – 641049
DEPARTMENT OF INFORMATION TECHNOLOGY
U18ITI2201L – Digital Logic and Microprocessor Laboratory
Bona-fide Certificate
Roll Number
Certified that this is the bona-fide record of work done by
Mr/Ms______________________________________ of the ________________ semester in
__________________________________________________________
branch
during
the
academic year____________________
Staff in – Charge
Submitted for the University Practical Examination held on ………………………………….
Internal Examiner
Index
S.No
Date
Name of the Experiments
1.
Implementation of logic functions
2.
Adders and Subtractors
3.
Combinational Circuit Design
4.
Sequential Circuit Design
5.
ALP Arithmetic programming
6.
Sorting
7.
Data Movement
8.
Wave form Generation using 8255
9.
Display the given message using 8279
10.
Interfacing analog to digital converter to
8086
Average out of 30
Marks Signature
Page
Obtained
of the
No
(30)
Faculty
Exp No :
Date :
01
Implementation of logic functions
OBJECTIVE
1. To study about logic gates and verify their truth tables.
2. To implement a simple Boolean expression
APPARATUS REQUIRED
SL No.
COMPONENT
SPECIFICATION
QTY
1.
AND GATE
IC 7408
1
2.
OR GATE
IC 7432
1
3.
NOT GATE
IC 7404
1
4.
NAND GATE 2 I/P
IC 7400
1
5.
NOR GATE
IC 7402
1
6.
X-OR GATE
IC 7486
1
7.
NAND GATE 3 I/P
IC 7410
1
8.
IC TRAINER KIT
-
1
9.
PATCH CORD
-
As
Required
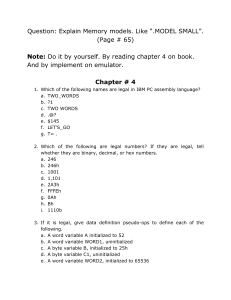
THEORY:
Circuit that takes the logical decision and the process are called logic gates. Each
gate has one or more input and only one output.
OR, AND and NOT are basic gates. NAND, NOR and X-OR are known as universal
gates. Basic gates form these gates.
1
AND GATE:
SYMBOL:
PIN DIAGRAM:
OR GATE:
2
AND GATE:
The AND gate performs a logical multiplication commonly known as AND function.
The output is high when both the inputs are high. The output is low level when any one of
the inputs is low.
OR GATE:
The OR gate performs a logical addition commonly known as OR function. The
output is high when any one of the inputs is high. The output is low level when both the
inputs are low.
NOT GATE:
The NOT gate is called an inverter. The output is high when the input is low. The
output is low when the input is high.
NAND GATE:
The NAND gate is a contraction of AND-NOT. The output is high when both inputs
are low and any one of the input is low. The output is low level when both inputs are high.
NOR GATE:
The NOR gate is a contraction of OR-NOT. The output is high when both inputs are
low. The output is low when one or both inputs are high.
X-OR GATE:
The output is high when any one of the inputs is high. The output is low when both
the inputs are low and both the inputs are high.
3
NOT GATE:
SYMBOL:
PIN DIAGRAM:
X-OR GATE :
SYMBOL :
PIN DIAGRAM :
4
2-INPUT NAND GATE:
SYMBOL:
PIN DIAGRAM:
3-INPUT NAND GATE :
5
NOR GATE:
2) Implementation of Boolean Expression:
DeMorgan’s Theorem
A.B = A+B
6
A+B = A.B
PROCEDURE:
(i)
Connections are given as per circuit diagram.
(ii)
Logical inputs are given as per circuit diagram.
(iii)
Observe the output and verify the truth table.
RESULT:
7
Preparation
/10
Observation
/10
Viva
/10
Total
/30
ADDERS
HALF ADDER
TRUTH TABLE:
K-Map for SUM:
SUM = A’B + AB’
A
B
CARRY
SUM
0
0
0
0
0
1
0
1
1
0
0
1
1
1
1
0
K-Map for CARRY:
CARRY = AB
8
Exp No :
Date :
02
Adders and Subtractors
OBJECTIVE
To construct adders, subtractors and verify the truth table using logic gates.
APPARATUS REQUIRED
Sl.No.
COMPONENT
SPECIFICATION
QTY.
1.
AND GATE
IC 7408
1
2.
X-OR GATE
IC 7486
1
3.
NOT GATE
IC 7404
1
4.
OR GATE
IC 7432
1
3.
IC TRAINER KIT
-
1
4.
PATCH CORDS
-
As
Required
THEORY:
HALF ADDER:
A half adder has two inputs for the two bits to be added and two outputs one from
the sum ‘ S’ and other from the carry ‘ c’ into the higher adder position. Above circuit is
called as a carry signal from the addition of the less significant bits sum from the X-OR Gate
the carry out from the AND gate.
9
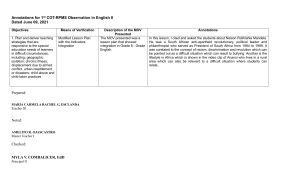
FULL ADDER
FULL ADDER USING TWO HALF ADDER
TRUTH TABLE:
A
B
C
CARRY
SUM
0
0
0
0
0
0
0
1
0
1
0
1
0
0
1
0
1
1
1
0
1
0
0
0
1
1
0
1
1
0
1
1
0
1
0
1
1
1
1
1
K-Map for SUM:
K-Map for CARRY:
SUM = A’B’C + A’BC’ + ABC’ + ABC
CARRY = AB + BC + AC
10
FULL ADDER:
A full adder is a combinational circuit that forms the arithmetic sum of input; it
consists of three inputs and two outputs. A full adder is useful to add three bits at a time
but a half adder cannot do so. In full adder sum output will be taken from X-OR Gate, carry
output will be taken from OR Gate.
HALF SUBTRACTOR:
The half subtractor is constructed using X-OR and AND Gate. The half subtractor has
two inputs and two outputs. The outputs are difference and borrow. The difference can be
applied using X-OR Gate, borrow output can be implemented using an AND Gate and an
inverter.
FULL SUBTRACTOR:
The full subtractor is a combination of X-OR, AND, OR, NOT Gates. In a full
subtractor the logic circuit should have three inputs and two outputs. The two half
subtractor put together gives a full subtractor. The first half subtractor will be C and A B.
The output will be difference output of full subtractor. The expression AB assembles the
borrow output of the half subtractor and the second term is the inverted difference output
of first X-OR.
11
SUBTRACTOR
HALF SUBTRACTOR:
TRUTH TABLE:
K-Map for Difference:
K- Map for Borrow:
LOGIC DIAGRAM:
12
FULL SUBTRACTOR:
TRUTH TABLE:
K-Map for Difference:
K- Map for Borrow:
13
LOGIC DIAGRAM:
14
PROCEDURE:
(i)
Connections are given as per circuit diagram.
(ii)
Logical inputs are given as per circuit diagram.
(iii)
Observe the output and verify the truth table.
RESULT:
15
Preparation
/10
Observation
/10
Viva
/10
Total
/30
Encoder & Decoder
Encoder
Truth table
Logical expression & Diagram
A1 = Y3+Y2
A0 = Y3+Y1
16
Exp No :
Date :
03
Combinational Circuit Design
OBJECTIVE
To construct encoder, decoder, multiplexer, demultiplexer, and code converters
and verify the truth table using logic gates.
APPARATUS REQUIRED
Sl.No.
COMPONENT
SPECIFICATION
QTY.
1.
3 I/P AND GATE
IC 7411
2
2.
AND GATE
IC7408
1
3.
OR GATE
IC 7432
1
4.
NOT GATE
IC 7404
1
5.
XOR GATE
IC7486
1
6.
IC TRAINER KIT
-
1
7.
PATCH CORDS
-
THEORY:
ENCODER
An encoder is a combinational logic circuit that generate n output lines from 2n (or less)
inputs. It has the reverse function of the decoder. An encoder accepts digit on its inputs,
such as a decimal or octal digit, and converts it to a coded output, such as a binary or BCD.
Encoder can also be devised to encode various symbol and alphabetic characters. This
process of converting from familiar symbols or numbers to a coded format is called
encoding.
DECODER
A decoder is a combinational logic circuit that takes a binary input, usually in a coded form,
and produces a one-bit output, on one of 2n output lines. The logic state (1 or 0) on any of
the output lines depends on a code appearing on the input lines.
17
Decoder
Truth Table
Y3 = A1+A0,
Y2 = A1+A0’ ,
Y1 = A1’+A0 ,
Logic Diagram
18
Y0 = A1’+A0’
MULTIPLEXER:
Multiplexer means transmitting many information units over a smaller number of channels
or lines. A digital multiplexer is a combinational circuit that selects binary information from
one of many input lines and directs it to a single output line. The selection of an input line is
controlled by a set of selection lines. Normally there are 2n input lines and n selection lines
whose bit combination determine which input is selected. Thus, multiplexer is called as
data selector.
DEMULTIPLEXER:
The function of Demultiplexer contrasts with multiplexer function. It takes
information from one line and distributes it to a given number of output lines. For this
reason, the demultiplexer is also known as a data distributor.
Gray Code
Gray code – also known as Cyclic Code, Reflected Binary Code (RBC), Reflected Binary
(RB) or Grey code – is defined as an ordering of the binary number system such that each
incremental value can only differ by one bit. In gray code, while traversing from one step to
another step only one bit in the code group changes. That is to say that two adjacent code
numbers differ from each other by only one bit.
Gray code is the most popular of the unit distance codes, but it is not suitable for arithmetic
operations. Gray code has some applications in analog to digital converters, as well as being
used for error correction in digital communication. Gray code can be difficult to understand
initially, but becomes much easier to understand when looking at the gray code tables
below.
Binary to Gray Code Converter
The logical circuit which converts the binary code to equivalent gray code is known as
binary to gray code converter. An n-bit gray code can be obtained by reflecting an n-1 bit
code about an axis after 2n-1 rows and putting the MSB (Most Significant Bit) of 0 above the
axis and the MSB of 1 below the axis.
19
Multiplexer & Demultiplexer
Multiplexer
Truth Table
Y=S1′S0′I0+S1′S0I1+S1S0′I2+S1S0I3
Logic Diagram
20
Demultiplexer
Truth Table
Y3=S1S0I,
Y2= S1S0′I,
Y1=S1′S0I,
Logic Diagram
21
Y0=s1′s0′I
Code Converters
Binary to Gray code converter
Truth Table
K – Map
K-map for
– G0
G0 = b0 Ꚛ b1
22
K-map for
– G1
G1 = b1 Ꚛ b2
K-map for
– G2
G2 = b2 Ꚛ b3
K-map for
G1 = b3
23
– G3
Logic Diagram
24
PROCEDURE:
(i)
Connections are given as per circuit diagram.
(ii)
Logical inputs are given as per circuit diagram.
(iii)
Observe the output and verify the truth table.
RESULT:
25
Preparation
/10
Observation
/10
Viva
/10
Total
/30
LOGIC DIAGRAM
Basic flipflop using NAND gates
Truth Table
S
R
Q
0
0
Forbidden
0
1
1
1
0
0
1
1
No Change
Basic flipflop using NOR gates
S
R
Q
0
0
No Change
0
1
0
1
0
1
1
1
Forbidden
R-S flip-flop using NAND gates
26
S
R
Q
0
0
No Change
0
1
0
1
0
1
1
1
Forbidden
Exp No :
Date :
04
Sequential Circuit Design
OBJECTIVE
To construct basic flip-flops R-S , D, J-K,T using gates and verify their truth tables.
To construct counters and shift registers using flip flop IC’s.
APPARATUS REQUIRED
Sl.No.
COMPONENT
SPECIFICATION
QTY.
1.
3 input NAND GATE
IC 7410
1
2.
NOR GATE
IC 7402
1
3.
NAND GATE
IC 7400
1
4.
NOT GATE
IC 7404
1
5.
D FLIP FLOP
IC 7474
2
6.
JK FLIP FLOP
IC 7476
2
7.
IC TRAINER KIT
-
1
8.
PATCH CORDS
-
As Required
THEORY
A flip-flop or latch is a circuit that has two stable states and can be used to store
state information. The circuit can be made to change state by signals applied to one or more
control inputs and will have one or two outputs. It is the basic storage element
in sequential logic. Flip-flops and latches are a fundamental building block of digital
electronics systems used in computers, communications, and many other types of systems.
Flip-flops and latches are used as data storage elements. Such data storage can be
used for storage of state, and such a circuit is described as sequential logic. When used in
a finite-state machine, the output and next state depend not only on its current input, but
also on its current state (and hence, previous inputs). It can also be used for counting of
pulses, and for synchronizing variably-timed input signals to some reference timing signal.
27
J-k flip-flop using NAND gates
28
J
K
Q
0
0
No Change
0
1
0
1
0
1
1
1
Race around
Flip-flops can be either simple (transparent or opaque) or clocked (synchronous or edgetriggered); the simple ones are commonly called latches. The word latch is mainly used for
storage elements, while clocked devices are described as flip-flops.A latch is level-sensitive,
whereas a flip-flop is edge-sensitive. That is, when a latch is enabled it becomes
transparent, while a flip flop's output only changes on a single type (positive going or
negative going) of clock edge.
PIN diagram of IC 7474
29
Counters
2-bit asynchronous counter (Ripple Counter)
30
Binary Counters
Normally binary counters are used for counting the number of pulses coming at the input
line in a specified time period.
The binary counters must possess memory since it has to remember its past states.
As the name suggests, it is a circuit which counts. The main purpose of the counter is to
record the number of occurrences of some input.
Counters can be classified into two broad categories according to the way they are clocked:
•
•
Asynchronous (Ripple) Counters – The first flip-flop is clocked by the external
clock pulse, and then each successive flip-flop is clocked by the Q or Q’ output of
the previous flip-flop.
Synchronous Counters – All memory elements are simultaneously triggered by
the same clock.
Classification of counters
Depending on the way in which the counting progresses, the synchronous or asynchronous
counters are classified as follows.
▪
Up counters
▪
Down counters
▪
Up/Down counters
31
2-bit synchronous counter
32
Shift registers
The Shift Register is another type of sequential logic circuit that can be used for the storage
or the transfer of binary data
This sequential device loads the data present on its inputs and then moves or “shifts” it to
its output once every clock cycle, hence the name Shift Register.
A shift register basically consists of several single bit “D-Type Data Latches”, one for each
data bit, either a logic “0” or a “1”, connected together in a serial type daisy-chain
arrangement so that the output from one data latch becomes the input of the next latch and
so on.
Data bits may be fed in or out of a shift register serially, that is one after the other from
either the left or the right direction, or all together at the same time in a parallel
configuration.
The number of individual data latches required to make up a single Shift Register device is
usually determined by the number of bits to be stored with the most common being 8-bits
(one byte) wide constructed from eight individual data latches.
Shift Registers are used for data storage or for the movement of data and are therefore
commonly used inside calculators or computers to store data such as two binary numbers
before they are added together, or to convert the data from either a serial to parallel or
parallel to serial format. The individual data latches that make up a single shift register are
all driven by a common clock ( Clk ) signal making them synchronous devices.
Shift register IC’s are generally provided with a clear or reset connection so that they can be
“SET” or “RESET” as required. Generally, shift registers operate in one of four different
modes with the basic movement of data through a shift register being:
33
Serial-in to Serial-out (SISO) Shift Register
Serial-in to Parallel-out (SIPO) Shift Register
34
▪
Serial-in to Parallel-out (SIPO) - the register is loaded with serial data, one bit at a
time, with the stored data being available at the output in parallel form.
▪
Serial-in to Serial-out (SISO) - the data is shifted serially “IN” and “OUT” of the
register, one bit at a time in either a left or right direction under clock control.
▪
Parallel-in to Serial-out (PISO) - the parallel data is loaded into the register
simultaneously and is shifted out of the register serially one bit at a time under clock
control.
▪
Parallel-in to Parallel-out (PIPO) - the parallel data is loaded simultaneously into
the register, and transferred together to their respective outputs by the same clock
pulse.
Types of Shift Registers
Shift registers are categorized into types majorly by their mode of operation, either
serial or parallel.
There are six (6) basic types of shift registers which are listed below although some of
them can be further divided based on direction of data flow either shift right or shift left.
1. Serial in – Serial out Shift Register (SISO)
2. Serial In – Parallel out shift Register (SIPO)
3. Parallel in – Parallel out Shift Register (PIPO)
4. Parallel in – Serial out Shift Register (PISO)
5. Bidirectional Shift Registers
6. Counters
35
to Serial-out (PISO) Shift Register
Parallel-in to Parallel-out (PIPO) Shift Register
36
PROCEDURE:
(i)
Connections are given as per circuit diagram.
(ii)
Logical inputs are given as per circuit diagram.
(iii)
Observe the output and verify the truth table.
RESULT:
37
Preparation
/10
Observation
/10
Viva
/10
Total
/30
38
8086
MICROPROCESSORS
EXPERIMENTS
39
EXECUTION PROCEDURE FOR 8086 (for registers)
i) Writing an alp program into processor:
Switch On Power Supply
Press A 2times
SG 0 press enter
DA starting address
Press enter
N
Then display shows @ here you have to write 1 Mnemonic
Press enter
N (display displays address Opcode mnemonic)
N
Then display shows @ here you have to write 2nd mnemonic
Press enter
N
N
Then display shows @ up to last mnemonic
Press enter
N
N
40
! Press enter
EX press enter
ii) Execution of program (for registers):
G enter starting address
Press enter
iii) Verify the result (for registers):
Press R
Press E.
EXECUTION PROCEDURE FOR 8086 (for memory locations)
i) Writing an alp program into processor:
Switch On Power Supply
Press A
A
SG 0
Press enter
DA starting address
Press enter
N
Then display shows @ here you have to write 1st mnemonic
Press enter
N (display displays address Opcode mnemonic)
41
N
Then display shows @ here you have to write 2nd mnemonic
Press enter
N
N
Then display shows @ up to last mnemonic
Press enter
N
N
! Press enter
EX press enter
E (exam byte)
Here you have to type SI address, give 1st data, 2nd data, -----, nth data,
Press enter
ii) Execution of program (for memory locations):
G enter starting address
Press enter
42
iii) Verify the result (for memory locations):
E
Then give DI address press, then display shows the result of 1st 8 bit data
For 2nd 8 bit data again press, -------, nth data
43
PRE-REQUISITES
16Bit Microprocessor: 8086
Features of 8086
❖ 8086 is a 16bit processor. It’s ALU, internal registers works with 16bit binary word
❖ 8086 has a 16bit data bus. It can read or write data to a memory/port either 16bits
or 8 bit at a time
❖ 8086 has a 20bit address bus which means, it can address up to 2 20 = 1MB memory
location
❖ Frequency range of 8086 is 6-10 MHz
44
45
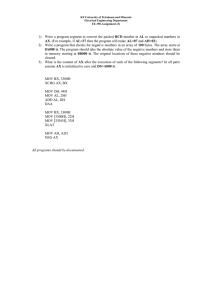
PIN DIAGRAM OF 8086
Power supply and frequency signals
Clock signal
It uses 5V DC supply at VCC pin 40, and uses Clock signal is provided through Pin-19. It
ground at VSS pin 1 and 20 for its operation.
provides timing to the processor for operations.
Its frequency is different for different versions,
i.e. 5MHz, 8MHz and 10MHz.
Address/data bus
Address/status bus
AD0-AD15. These are 16 address/data bus.
AD0-AD7 carries low order byte data and
AD8AD15 carries higher order byte data.
During the first clock cycle, it carries 16-bit
address and after that it carries 16-bit data.
S7/BHE
A16-A19/S3-S6. These are the 4 address/status
buses. During the first clock cycle, it carries 4-bit
address and later it carries status signals.
Read ($\overline{RD}$)
BHE stands for Bus High Enable. It is available It is available at pin 32 and is used to read signal
at pin 34 and used to indicate the transfer of for Read operation.
data using data bus D8-D15. This signal is low
during the first clock cycle, thereafter it is
active.
46
Ready
RESET
It is available at pin 32. It is an
acknowledgement signal from I/O devices that
data is transferred. It is an active high signal.
When it is high, it indicates that the device is
ready to transfer data. When it is low, it
indicates wait state.
INTR
It is available at pin 21 and is used to restart the
execution. It causes the processor to immediately
terminate its present activity. This signal is active
high for the first 4 clock cycles to RESET the
microprocessor.
It is available at pin 18. It is an interrupt
request signal, which is sampled during the last
clock cycle of each instruction to determine if
the processor considered this as an interrupt or
not.
It stands for non-maskable interrupt and is
available at pin 17. It is an edge triggered input,
which causes an interrupt request to the
microprocessor.
NMI
$\overline{TEST}$
MN/$\overline{MX}$
This signal is like wait state and is available at pin
23. When this signal is high, then the processor
has to wait for IDLE state, else the execution
continues.
INTA
It stands for Minimum/Maximum and is
available at pin 33. It indicates what mode the
processor is to operate in; when it is high, it
works in the minimum mode and vice-versa.
ALE
It is an interrupt acknowledgement signal and id
available at pin 24. When the microprocessor
receives this signal, it acknowledges the
interrupt.
DEN
It stands for address enable latch and is
available at pin 25. A positive pulse is generated
each time the processor begins any operation.
This signal indicates the availability of a valid
address on the address/data lines.
DT/R
It stands for Data Enable and is available at pin
26. It is used to enable Transreceiver 8286. The
transreceiver is a device used to separate data
from the address/data bus.
It stands for Data Transmit/Receive signal and
is available at pin 27. It decides the direction of
data flow through the transreceiver. When it is
high, data is transmitted out and vice-a-versa.
This signal is used to distinguish between
memory and I/O operations. When it is high, it
indicates I/O operation and when it is low
indicates the memory operation. It is available at
pin 28.
M/IO
47
WR
HLDA
It stands for write signal and is available at pin
29. It is used to write the data into the memory
or the output device depending on the status of
M/IO signal.
HOLD
It stands for Hold Acknowledgement signal and is
available at pin 30. This signal acknowledges the
HOLD signal.
QS1 and QS0
This signal indicates to the processor that These are queue status signals and are available
external devices are requesting to access the at pin 24 and 25. These signals provide the status
address/data buses. It is available at pin 31
of instruction queue. Their conditions are shown
in the following table −
LOCK
QS0 QS1 Status
When this signal is active, it indicates to the
other processors not to ask the CPU to leave the
system bus. It is activated using the LOCK prefix
on any instruction and is available at pin 29.
0
0
No operation
0
1
First byte of opcode from the queue
1
0
Empty the queue
1
1
Subsequent byte from the queue
S0, S1, S2
RQ/GT1 and RQ/GT0
These are the status signals that provide the
status of operation, which is used by the Bus
Controller 8288 to generate memory & I/O
control signals. These are available at pin 26,
27, and 28. Following is the table showing their
status −
These are the Request/Grant signals used by the
other processors requesting the CPU to release
the system bus. When the signal is received by
CPU, then it sends acknowledgment. RQ/GT0 has
a higher priority than RQ/GT1.
S2 S1 S0 Status
0
0
0
Interrupt acknowledgement
0
0
1
I/O Read
0
1
0
I/O Write
0
1
1
Halt
1
0
0
Opcode fetch
1
0
1
Memory read
1
1
0
Memory write
1
1
1
Passive
48
INSTRUCTION SETS OF 8086
•
•
•
•
•
•
•
•
Data Transfer Instructions
Arithmetic Instructions
Bit Manipulation Instructions
String Instructions
Program Execution Transfer Instructions (Branch & Loop Instructions)
Processor Control Instructions
Iteration Control Instructions
Interrupt Instructions
Let us now discuss these instruction sets in detail.
Data Transfer Instructions
These instructions are used to transfer the data from the source operand to the destination
operand. Following are the list of instructions under this group −
Instruction to transfer a word
•
•
•
•
•
•
•
MOV − Used to copy the byte or word from the provided source to the provided
destination.
PPUSH − Used to put a word at the top of the stack.
POP − Used to get a word from the top of the stack to the provided location.
PUSHA − Used to put all the registers into the stack.
POPA − Used to get words from the stack to all registers.
XCHG − Used to exchange the data from two locations.
XLAT − Used to translate a byte in AL using a table in the memory.
Instructions for input and output port transfer
•
•
IN − Used to read a byte or word from the provided port to the accumulator.
OUT − Used to send out a byte or word from the accumulator to the provided port.
Instructions to transfer the address
•
•
•
LEA − Used to load the address of operand into the provided register.
LDS − Used to load DS register and other provided register from the memory
LES − Used to load ES register and other provided register from the memory.
Instructions to transfer flag registers
•
•
•
LAHF − Used to load AH with the low byte of the flag register.
SAHF − Used to store AH register to low byte of the flag register.
PUSHF − Used to copy the flag register at the top of the stack.
49
•
POPF − Used to copy a word at the top of the stack to the flag register.
Arithmetic Instructions
These instructions are used to perform arithmetic operations like addition, subtraction,
multiplication, division, etc.
Following is the list of instructions under this group −
Instructions to perform addition
•
•
•
•
•
ADD − Used to add the provided byte to byte/word to word.
ADC − Used to add with carry.
INC − Used to increment the provided byte/word by 1.
AAA − Used to adjust ASCII after addition.
DAA − Used to adjust the decimal after the addition/subtraction operation.
Instructions to perform subtraction
•
•
•
•
•
•
•
SUB − Used to subtract the byte from byte/word from word.
SBB − Used to perform subtraction with borrow.
DEC − Used to decrement the provided byte/word by 1.
NPG − Used to negate each bit of the provided byte/word and add 1/2’s
complement.
CMP − Used to compare 2 provided byte/word.
AAS − Used to adjust ASCII codes after subtraction.
DAS − Used to adjust decimal after subtraction.
Instruction to perform multiplication
•
•
•
MUL − Used to multiply unsigned byte by byte/word by word.
IMUL − Used to multiply signed byte by byte/word by word.
AAM − Used to adjust ASCII codes after multiplication.
Instructions to perform division
•
•
•
•
•
DIV − Used to divide the unsigned word by byte or unsigned double word by word.
IDIV − Used to divide the signed word by byte or signed double word by word.
AAD − Used to adjust ASCII codes after division.
CBW − Used to fill the upper byte of the word with the copies of sign bit of the lower
byte.
CWD − Used to fill the upper word of the double word with the sign bit of the lower
word.
50
Bit Manipulation Instructions
These instructions are used to perform operations where data bits are involved, i.e.
operations like logical, shift, etc.
Following is the list of instructions under this group −
Instructions to perform logical operation
•
•
•
•
•
NOT − Used to invert each bit of a byte or word.
AND − Used for adding each bit in a byte/word with the corresponding bit in
another byte/word.
OR − Used to multiply each bit in a byte/word with the corresponding bit in another
byte/word.
XOR − Used to perform Exclusive-OR operation over each bit in a byte/word with
the corresponding bit in another byte/word.
TEST − Used to add operands to update flags, without affecting operands.
Instructions to perform shift operations
•
•
•
SHL/SAL − Used to shift bits of a byte/word towards left and put zero(S) in LSBs.
SHR − Used to shift bits of a byte/word towards the right and put zero(S) in MSBs.
SAR − Used to shift bits of a byte/word towards the right and copy the old MSB into
the new MSB.
Instructions to perform rotate operations
•
•
•
•
ROL − Used to rotate bits of byte/word towards the left, i.e. MSB to LSB and to Carry
Flag [CF].
ROR − Used to rotate bits of byte/word towards the right, i.e. LSB to MSB and to
Carry Flag [CF].
RCR − Used to rotate bits of byte/word towards the right, i.e. LSB to CF and CF to
MSB.
RCL − Used to rotate bits of byte/word towards the left, i.e. MSB to CF and CF to LSB.
String Instructions
String is a group of bytes/words and their memory is always allocated in a sequential
order.
Following is the list of instructions under this group −
•
•
REP − Used to repeat the given instruction till CX ≠ 0.
REPE/REPZ − Used to repeat the given instruction until CX = 0 or zero flag ZF = 1.
51
•
•
•
•
•
•
•
REPNE/REPNZ − Used to repeat the given instruction until CX = 0 or zero flag ZF =
1.
MOVS/MOVSB/MOVSW − Used to move the byte/word from one string to another.
COMS/COMPSB/COMPSW − Used to compare two string bytes/words.
INS/INSB/INSW − Used as an input string/byte/word from the I/O port to the
provided memory location.
OUTS/OUTSB/OUTSW − Used as an output string/byte/word from the provided
memory location to the I/O port.
SCAS/SCASB/SCASW − Used to scan a string and compare its byte with a byte in AL
or string word with a word in AX.
LODS/LODSB/LODSW − Used to store the string byte into AL or string word into
AX.
Program Execution Transfer Instructions (Branch and Loop Instructions)
These instructions are used to transfer/branch the instructions during an execution. It
includes the following instructions −
Instructions to transfer the instruction during an execution without any condition −
•
•
•
CALL − Used to call a procedure and save their return address to the stack.
RET − Used to return from the procedure to the main program.
JMP − Used to jump to the provided address to proceed to the next instruction.
Instructions to transfer the instruction during an execution with some conditions −
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
JA/JNBE − Used to jump if above/not below/equal instruction satisfies.
JAE/JNB − Used to jump if above/not below instruction satisfies.
JBE/JNA − Used to jump if below/equal/ not above instruction satisfies.
JC − Used to jump if carry flag CF = 1
JE/JZ − Used to jump if equal/zero flag ZF = 1
JG/JNLE − Used to jump if greater/not less than/equal instruction satisfies.
JGE/JNL − Used to jump if greater than/equal/not less than instruction satisfies.
JL/JNGE − Used to jump if less than/not greater than/equal instruction satisfies.
JLE/JNG − Used to jump if less than/equal/if not greater than instruction satisfies.
JNC − Used to jump if no carry flag (CF = 0)
JNE/JNZ − Used to jump if not equal/zero flag ZF = 0
JNO − Used to jump if no overflow flag OF = 0
JNP/JPO − Used to jump if not parity/parity odd PF = 0
JNS − Used to jump if not sign SF = 0
JO − Used to jump if overflow flag OF = 1
JP/JPE − Used to jump if parity/parity even PF = 1
JS − Used to jump if sign flag SF = 1
52
Processor Control Instructions
These instructions are used to control the processor action by setting/resetting the flag
values.
Following are the instructions under this group −
•
•
•
•
•
•
•
STC − Used to set carry flag CF to 1
CLC − Used to clear/reset carry flag CF to 0
CMC − Used to put complement at the state of carry flag CF.
STD − Used to set the direction flag DF to 1
CLD − Used to clear/reset the direction flag DF to 0
STI − Used to set the interrupt enable flag to 1, i.e., enable INTR input.
CLI − Used to clear the interrupt enable flag to 0, i.e., disable INTR input.
Iteration Control Instructions
These instructions are used to execute the given instructions for number of times.
Following is the list of instructions under this group −
•
•
•
•
LOOP − Used to loop a group of instructions until the condition satisfies, i.e., CX = 0
LOOPE/LOOPZ − Used to loop a group of instructions till it satisfies ZF = 1 & CX = 0
LOOPNE/LOOPNZ − Used to loop a group of instructions till it satisfies ZF = 0 & CX
=0
JCXZ − Used to jump to the provided address if CX = 0
Interrupt Instructions
These instructions are used to call the interrupt during program execution.
•
•
•
INT − Used to interrupt the program during execution and calling service specified.
INTO − Used to interrupt the program during execution if OF = 1
IRET − Used to return from interrupt service to the main program
53
ADDITION
Address
Op-Code
Program
MOV AX,[3000]
Comments
Get the first data in AX reg
MOV BX, [3002]
Get the second data in BX reg
ADD AX,BX
Add the contents of both
the regs AX & BX
MOV [2000],AX
MOV [2002], CX
Store LSBs of sum.
Store MSBs of sum.
Stop the program
INT 3
OUTPUT
SUBTRACTION
Address
Op-Code
Program
Comments
MOV AX,[3000]
Get the first data in AX reg
MOV BX, [3002]
Get the second data in BX reg
SUB AX,BX
Subtract the contents of both
the regs AX & BX
MOV [2000],AX
MOV [2002], CX
INT 3
OUTPUT
54
Store LSBs of difference
Store MSBs of difference.
Stop the program
Exp No :
Date :
05
ALP Arithmetic programming
OBJECTIVE
To write an Assembly Language Program (ALP) for performing the Arithmetic operation of
two-byte numbers and to find factorial of a number.
APPARATUS REQUIRED:
SL.NO
1.
2.
ITEM
Microprocessor kit
SPECIFICATION
8086 kit
Power Supply
+5 V dc
QUANTITY
1
1
ALGORITHM
(i) 16-bit addition
(iii) Multiplication
of
16- bit
numbers
1. Get the multiplier.
2. Get the multiplicand
3. Initialize the product to 0.
4. Product = product + multiplicand
5. Decrement the multiplier by 1
6. If multiplicand is not equal to 0, repeat
from step (4) otherwise store the product.
1. Initialize the MSBs of sum to 0
2. Get the first number.
3. Add the second number to the f i r s t
number.
4. If
there
is
any
carry,
i n c r e m e n t MSBs of sum by 1
5. Store LSBs of sum.
6. Store MSBs of sum.
(ii) 16-bit subtraction
(iv) Division of 16-bit numbers.
1. Initialize the MSBs of difference to 0
2. Get the first number
3. Subtract the second number from
the first number.
4. If there is any borrow, increment
MSBs of difference by 1.
5. Store LSBs of difference
6. Store MSBs of difference.
1.
2.
3.
4.
5.
Get the dividend
Get the divisor
Initialize the quotient to 0.
Dividend = dividend – divisor
If t h e d i v i s o r i s g r e a t e r , s t o r e
the quotient. Go to step 6.
6. If dividend is greater, quotient =
Quotient + 1. Repeat from step (4)
7. Store the dividend value as
remainder
55
MULTIPLICATION
Address
Op-Code
Program
MOV AX,[3000]
MOV BX, [3002]
MUL BX
Comments
Get the first data
Get the second data
Multiply both
MOV [2000],AX
Store the lower order product
MOV [2002], CX
Store the higher order product
INT 3
Stop the program
OUTPUT
DIVISION
Address
Op-Code
Program
MOV AX,[1200]
Get the first data
MOV DX, [1202]
Get the second data
MOV BX, [1204]
Get Divider
DIV BX
Divide AX by BX
MOV [1206],AX
Store the lower order product
MOV AX,DX
Store quotient
MOV [1208],AX
Store the higher order product
INT 3
Stop the program
OUTPUT
56
Comments
FACTORIAL OF A NUMBER
RESULT:
57
Preparation
/10
Observation
/10
Viva
/10
Total
/30
ASCENDING
ADDRESS
OPCODES
START
PROGRAM
MOV AX,#8100
MOV DS,AX
MOV DX,COUNT
DEC DX
GO
MOV CX,DX
LEA SI,SERIES
NXT_BYTE
MOV AL,[SI]
CMP AL,[SI+1]
JB NEXT
XCHG AL,[SI+1]
XCHG AL,[SI]
NEXT
INC SI
LOOP NXT_BYTE
DEC DX
JNZ GO
MOV AH, 4CH
INT 3
OUTPUT:
ASCENDING
MEMORY
INPUT
DATA
OUTPUT
MEMORY
DATA
58
COMMENTS
Exp No :
Date :
06
Sorting
OBJECTIVE
To write an Assembly Language Program (ALP) to sort a given array in ascending
and descending order
APPARATUS REQUIRED
SL.NO
ITEM
SPECIFICATION
QUANTITY
1.
Microprocessor kit
8086 kit
1
2.
Power Supply
+5 V dc
1
ALGORITHM:
(i)
Sorting in ascending order:
a. Load the array counting two registers C1 and C2.
b. Get the first two numbers.
c. Compare the numbers and exchange if necessary so that the two numbers are in
ascending order.
d. Decrement C2.
e. Get the third number from the array and repeat the process until C2 is 0.
f. Decrement C1and repeat the process until C1 is 0.
(ii)
Sorting in descending order:
1. Load the array count in two registers C1 and C2.
2. Get the first two numbers.
3. Compare the numbers and exchange if necessary so that the two numbers are in
descending order.
4. Decrement C2.
5. Get the third number from the array and repeat the process until C2 is 0.
Decrement C1and repeat the process until C1 is 0.
59
DESCENDING
ADDRESS
OPCODES
LOOP 1
PROGRAM
MOV CX,#0008
COMMENTS
MOV AH,#00
MOV BX,#8100
LOOP 2
MOV AL,[BX]
INC BX
CMP AL,[BX]
JNC LOOP 3
JE LOOP 3
MOV DL,[BX]
DEC BX
MOV [BX],AL
MOV AH,01
LOOP 3
LOOP LOOP 2
CMP AH,00
JNE LOOP 1
INT 3
OUTPUT:
ASCENDING
MEMORY
INPUT
DATA
OUTPUT
MEMORY
DATA
60
RESULT:
61
Preparation
/10
Observation
/10
Viva
/10
Total
/30
PROGRAM:
Address
Op-Codes
Program
Comments
MOV SI, [8200]
MOV DI,[8300]
MOV CX,005
Rep
MOVSB
INT 3
OUTPUT
MEMORY ADDRESS
DATA-I
DATA-II
INPUT
OUTPUT
62
DATA III
Exp No :
Date :
07
Data Movement
OBJECTIVE
Write an ALP to Move a data block without overlap using 8086.
APPARATUS REQUIRED
SL.NO
1.
2.
ITEM
Microprocessor kit
SPECIFICATION
8086 kit
Power Supply
+5 V dc
QUANTITY
1
1
ALGORITHM
1. Initialize the memory location to the data pointer.
2. Increment B register.
3. Increment accumulator by1andadjust it to decimal every time.
4. Compare the given decimal number with accumulator value.
5. When both match, the equivalent hexadecimal value is in B register.
Store the resultant in memory location
RESULT:
63
Preparation
/10
Observation
/10
Viva
/10
Total
/30
PROGRAM TO GENERATE SQUARE WAVE
A0:
MOV AL,80
MOV DX,0FFC6
OUT DX
MOV DX,0FFC2
MOV AL,00
OUT DX
CALL DELAY 1
MOV AL,0FF
OUT DX
CALL DELAY2
JMP A0
DELAY 1:
MOV CX,0020
LOOP DELAY 1
RET
DELAY 2:
MOV CX,0020
LOOP DELAY 2
RET
OUT DX
64
Exp No :
Date :
08
Wave form generation
OBJECTIVE
Write an ALP to generate square wave form using 8255 PPI
APPARATUS REQUIRED
SL.NO
ITEM
1.
Microprocessor kit
2.
SPECIFICATION
QUANTITY
8086 kit
2
Power Supply
+5 V dc, 12V
1
3.
FRC Connector
-
1
4.
A/D, D/A interface module
-
1
5
CRO
-
1
6
Power mate connector
-
1
RESULT:
65
Preparation
/10
Observation
/10
Viva
/10
Total
/30
PROGRAM
3002
3000
3000
LE:
L1:
RPT:
L2:
L3:
CTRL
DAT
TBL:
DB
MOV
MOV
OUT
MOV
OUT
MOV
OUT
MOV
LOOP
MOV
OUT
MOV
MOV
MOV
OUT
MOV
MOV
OUT
MOV
LOOP
INC
DEC
JNZ
MOV
LOOP
INT
EQU 3002H
EQU 3000H
DB 3FH,06H,5BH,4FH
66H,6DH,7DH,07H
AL, 09H
DX, CTRL
DX, AL
AL, 31H
DX, AL
AL, D0H
DX, AL
CX, 0FFFFH
L1
AL, 01H
DX, AL
AH, 08
BX, OFFSET TBL
AL, 90H
DX, AL
AL,[BX]
DX, DAT
DX, AL
CX, 0FFFFH
L2
BX
AH
RPT
CX, 0FFFFH
L3
3
66
;control word
;data word
//LE 8 bit char. display
//clock dividing factor
//clear display
//wait till display is cleared
//control word for 8 chars
//left entry mode. 8 no. of chars
//will be displayed
//char displayed is stored
//control word for writing to
//display auto increment
// delay
Exp No :
Date :
09
Display the given message using 8279
OBJECTIVE
Write an ALP program to display the numeric numbers using 8086.
APPARATUS REQUIRED
SL.NO
ITEM
SPECIFICATION
QUANTITY
1.
Microprocessor kit
8086 kit
1
2.
Power Supply
+5 V dc
1
3.
Keyboard
-
1
RESULT:
67
Preparation
/10
Observation
/10
Viva
/10
Total
/30
A/D CONVERTER
D1:
MOV AL,90
MOV DX,0FFC6
OUT DX
MOV AL,07
MOV DX,FFC4
OUT DX
MOV AL,0F
MOV DX,0FFC6
OUT DX
MOV CX,3FFF
LOOP D1
D2:
MOV AL,0E
MOV DX,0FFC6
OUT DX
MOV AL,0C
MOV DX,0FFC6
OUT DX
MOV DX,0FFC0
IN DX
D3:
AND AL,80
CMP AL,80
JNZ D2
MOV AL,0D
MOV DX,0FFC6
OUT DX
MOV DX,0FFC0
IN DX
MOV DX,0FFC2
OUT DX
JMP D3
68
Exp No :
Date :
10
Interfacing analog to digital converter to 8086
OBJECTIVE
To write a program for conversion of analog data to digital output.
APPARATUS REQUIRED
SL.NO
ITEM
1.
Microprocessor kit
2.
SPECIFICATION
QUANTITY
8086 kit
2
Power Supply
+5 V dc, 12V
1
3.
FRC Connector
-
1
4.
A/D, D/A interface module
-
1
5
CRO
-
1
6
Power mate connector
-
1
69
70
PROCEDURE
❖ Connect the 26 core FRC connector to the 8086 trainer at connector no CN4 and the
interface module.
❖ Connect the power mate connector to the interface module and the other side of the
connector to the power supply. The connections to the power supply are given
below.
Connections: (power supply)
Black & Red: Gnd.
Blue & Green: +5V
❖ 5- Way power mate is wired to the motor. This power mate is to be inserted into the
male socket provided on the interface. Care should be taken such that, below given
code for the particular colored wire coincides with the code on the interface.
A- GREEN
C- RED & WHITE
B- GREEN & WHITE
D- RED
VDD - BLACK & WHITE.
❖ After the completion of the program and connections enter the program as given in
the listing below.
G0< STARTING ADDRESS< ENTER (on the key board of trainer).
RESULT:
71
Preparation
/10
Observation
/10
Viva
/10
Total
/30