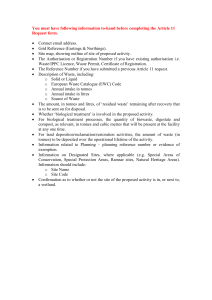
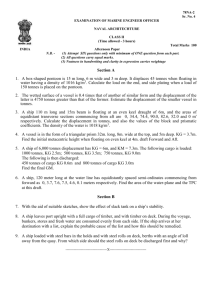
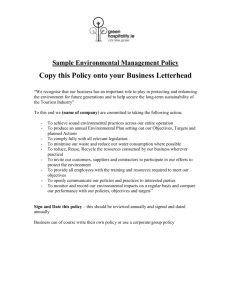
11th International Conference on Fast Sea Transportation FAST 2011, Honolulu, Hawaii, USA, September 2011 Tools for Analysing and Comparing Tri-SWACH, Monohull and Trimaran Hullforms Tim P. McDonald, Richard W.G. Bucknall, and Alistair R. Greig Marine Research Group, Dept. of Mechanical Engineering, UCL, London, UK ABSTRACT Alternative hullforms such as multihulls may allow small vessels to deliver levels of performance normally associated with a far larger and more costly monohull vessel. This paper describes a research programme on alternative hullforms being undertaken by a consortium of six universities and academic institutions. As well as reviewing the current research programme, this paper discusses in detail the contribution being made by UCL: Tools for undertaking the comparison and exploration of the Monohull, Trimaran and TriSWACH alternatives. These tools combine the modelling and analysis capabilities of an existing naval architecture design package with a varied range of search and optimisation techniques to enable the exploration of alternatives ship design solutions. This paper presents the initial results obtained from tools that are currently under development at UCL. Such tools can be applied to identify and explore key topics related to the Trimaran and TriSWACH hullforms when compared to a baseline Monohull configuration. The Trimaran hullform has significant potential for small fast combatants; as demonstrated by the US Navy’s LCS programme. The TriSWACH hullform (with a small waterplane area centre hull stabilised by two outriggers) is of interest as it offers the potential to improved seakeeping performance. UCL is applied to examine a specific issue that arise with the TriSWACH designs. Conclusions and an indication of intended future work are then provided. 2.0 ACCeSS PROJECT The research presented in this paper has evolved as part of a project undertaken by the Atlantic Center for the Innovative Design and Control of Small Ships (ACCeSS). ACCeSS is a university/industry consortium that includes: Stevens Institute of Technology; US Naval Academy; Webb Institute; US Naval Postgraduate School; Florida Atlantic University; and University College London (UCL);. ACCeSS is currently engaged in collaborative research activities across three areas: Unmanned Surface Vessels; TriSWACH Studies; Educational Collaboration. The TriSWACH studies consist of development and validation of a trimaran variant featuring a centerhull with minimal area at the waterplane and two small outriggers (to provide necessary stability). The work includes design studies, hydrodynamic testing and performance analysis. This hullform is seen to offer the potential to improve seakeeping performance. Fig. 1 provides definitions of the elements of a TriSWACH hullform as used in this paper. KEY WORDS Design comparison, Trimaran, TriSWACH, Ship, Hullform. 1.0 INTRODUCTION Examining the potential of any novel hullform style requires a significant expenditure of effort if radical design alternatives are to be considered at the outset of the design process (McDonald, 2010). This paper details one approach to exploring alternatives that is currently being examined. After introducing the context in which the research is taking place, this paper then summarises prior Trimaran Small Waterplane Area Center Hull (TriSWACH) research and identifies risk areas. Resistance data, derived from model tests, highlighted that favourable residual resistance could be obtained up to a Froude number of 0.5 (corresponding to a displacement of 1000 tonnes for a typical TriSWACH geometry). Initial numerical sizing studies highlight the gross characteristics of Monohull, Trimaran and TriSWACH patrol craft with a displacement in the region of 1000 tonnes. Next, a software tool under development at © 2011 American Society of Naval Engineers Fig. 1. TriSWACH hullform definitions One part of the UCL contribution to the ACCeSS group’s work will be a comprehensive exploration of the TriSWACH hullform and compare it to alternative hullform solutions such as the monohull and trimaran. This work is intended to identify the requirements and missions for which the TriSWACH could provide a superior option to these other hullforms. 3.0 TriSWACH RESEARCH Considerable research and design guidance is available for SWATH hullforms (Kennel, 1992). Comprehensive reviews 747 of prior research on the design and performance prediction of three hulled hullforms (concentrating on the trimaran) have been conducted by several authors (Dubrovsky, 2001, 2004; Andrews, 2004). These authors also introduce some research related to the TriSWACH hullform which Andrews (2004) highlights as “more nearly another type of multihull rather than a trimaran variant since it lacks the essential characteristic of the trimaran, namely being a slender monohull with small displacement side hulls.” 3.1 Prior UCL Design Studies UCL has conducted a number of concept design studies into the application of the TriSWACH hullform to a variety of different design requirements. Three significant UCL studies are described below and illustrated in Fig. 2: TriSWACH Anti-Submarine Warfare (ASW) Frigate – Integrated Full Electric Propulsion twin shaft design capable of 30kts. With a total displacement of 7700te this ship was designed to Royal Navy standards and provided a highly capable ASW and land attack payload. (Boulby et al. 2000) TriSWACH Offshore Patrol Vessel (OPV) – A low cost and low risk OPV featuring a largely Commercial Off The Shelf (COTS) single shaft propulsion system able to achieve 14.5kts. With a total displacement of 1000te this small vessel provided both a boat and nonorganic helicopter capability. (Smith et al. 2004) Persistence Unmanned Aerial Vehicle (UAV) Carrier – This design study demonstrated a large 11000te TriSWACH intended to carry six large fixed wing surveillance UAVs. The TriSWACH hullform’s geometry allowed a short take-off and landing capability through a flight deck approximately 200m long in a relatively low displacement ship (c.f. a monohull). The vessel employed IFEP propulsion to achieve 18kts. (Andrews & Pawling, 2009) 3.2 Hullform Risk and Research Areas A review of the wider research related to the TriSWACH hullform identified key risks across five areas: Speed; Stability; Seakeeping; Strength; and Style. 3.2.1 Speed There is currently little published data on the applicability of different resistance estimation techniques for TriSWACH hullforms. There is limited availability for data arriving from model tests (Min-tong et al., 2004) and few studies of the validity of resistance prediction tools to these hullforms. On-going work by other members of the ACCeSS consortium is expected to improve the available knowledge in these areas. The lack of appropriate information for early stage design is judged to pose significant risk. The physical constraints of the submerged TriSWACH hull and narrow strut could cause considerable difficulties to the arrangement of prime movers and hence the choice of overall propulsion system architecture and the total system performance (e.g. efficiency, carbon foot print, removal routes, e.tc.). At higher speed providing sufficient “power into the water” may also be problematic. (b) OPV (Smith et al. 2004) (a) Anti-submarine warfare frigate (Boulby et al. 2000) (c) Persistence UAV carrier (Andrews & Pawling, 2009) Fig. 2. TriSWACH hullform definitions 748 © 2011 American Society of Naval Engineers 3.2.2 Stability The intact and damage stability standards that would be applicable to a conventional hullform must be carefully interpreted to ensure the vessel complies with the intent of the regulations. Additionally, other potential risk areas must be examined to ensure no unforeseen issues arise (i.e. UCL studies highlighted the possibility of parametric resonance arising from the vessels GM changing in waves – Smith et al. (2004) reported GM variations between 3.2m and 8.0m). 3.2.3 Seakeeping linked propulsion system sizing and performance evaluation tool able to explore large variations in the total vessel size and its resultant powering requirements. 4.1 General Trends Using the numerical sizing tools general trends in total displacement and weather deck area were examined as the payload capacity was changed. The payload mass was changed from 0-500 tonnes and the payload volume was changed from 0-2000 m3. The trends for the three different hullforms are presented in Fig. 3. The TriSWACH hullform is assumed to provide seakeeping advantages compared to other hullforms. While significant experimental and full scale seakeeping data now exists for the trimaran hullform, there is limited experience in predicting the seakeeping performance of the TriSWACH hullform. Other members of the ACCeSS consortium are currently undertaking studies in this area. Earlier research by two of the ACCeSS partners has identified the possibility of heave-roll coupling in three hulled vessels (Grafton 2007, Onas 2009). 3.2.4 Strength Given the uncertainties regarding TriSWACH seakeeping, it is currently difficult to quantify likely local and global structural loads arising from combined vessel and wave motions. However, the small waterplane area of the centrehull should lead to low longitudinal bending moments compared to a monohull. Furthermore, the TriSWACH will experience smaller prying loads than a comparable vessel adopting a SWATH hullform. The potential applicability of existing design methods to the TriSWACH (e.g. Lloyd’s Register’s Rules for Trimaran Ships (Cheng, 2004; Lloyd’s Register, 2006)). (a) Monohull 3.2.5 Style This paper has suggested that adopting a TriSWACH hullform would allow a smaller vessel to achieve comparable seakeeping performance to a larger vessel with a conventional monohull. Any comparison of alternative hullform options must consider designs able to perform an equivalent role. In fulfilling the role other criteria related to the operability of the vessel become important. Two areas of concern identified at this early stage in the study are launch and recovery operations (of the boats, aircraft and unmanned craft required as part of the vessel’s operation) and draught sensitivity (especially for TriSWACH vessels with large fuel loads). The TriSWACH is seen to provide opportunities related to layout and signature reduction. 4.0 (b) Trimaran EARLY VESSEL SIZING STUDIES Initial tool development efforts commenced with the creation of a suite of numerical sizing tools for Monohull, Trimaran and TriSWACH vessels. The procedure and data underlying these tools were adapted from the guidance given to UCL postgraduate students as part of their ship design exercise (UCL 2011a, 2011b). These tools were constructed in a manner that allowed the exploration of potential alternatives through high-level comparative studies between the three different options. The tools featured a © 2011 American Society of Naval Engineers (c) TriSWACH Fig. 3. Trends in total displacement and weather deck area with changing payload mass and volume 749 The irregularity seen in some of the steps from Fig. 3 arises from the complex interaction of the changing payload with the vessels overall size, geometry, resistance, power and propulsion machinery. The nonlinearities found within the different stages in this sizing process lead to nonlinear steps between different options. It is clear that the different hullforms provide radically differing amounts of upper deck space as the payload is changed. 4.2 Indicative Solutions Three of the design options produced by the numerical sizing tool are detailed in Sections 4.2.1 to 4.2.3. These point designs are indicative of the monohull, trimaran and TriSWACH solutions the tool generated. Common design specifications adopted across the three hullforms are given below: Accommodation for a crew of 30; Installed propulsive machinery and fuel able to provide: o A loitering capability of 8 knots for 400 nautical miles (equivalent to ~2 days); o Slow fleet operations capability of 18 knots for 1000 nautical miles (equivalent to ~3 days); o Fast fleet operations capability of 24 knots for 1000 nautical miles (equivalent to ~1.75 days); o Fast intercept mission 30 knots for 500 nautical miles (equivalent to ~16.5 hours). A modular payload space sized to support a payload with a mass of 125 tonnes and a volume of 500m3. 4.2.1 Monohull Table 1 contains the key characteristics of the monohull solution designed to the common design specifications given in Section 4.2. Table 1. Monohull key characteristic Property Total Displacement (m3) Length (m) Beam (m) Depth (m) Draft (m) Power for 30 knots (MW) Mass Grp 1 – Structure (tonnes) Mass Grp 2 - Personnel (tonnes) Mass Grp 3 - Systems (tonnes) Mass Grp 4 - Propulsion (tonnes) Mass Grp 5 - Electrical (tonnes) Mass Grp 6 - Payload (tonnes) Mass Grp 7 - Variables (tonnes) Value 1291 99.6 9.2 8.6 2.8 10.24 452.9 25.3 185.0 176.0 43.4 133.8 242.0 Table 2. Trimaran key characteristic Property Total Displacement (m3) Mainhull Length (m) Mainhull Beam (m) Mainhull Depth (m) Mainhull Draft (m) Sidehull Length (m) Sidehull Beam (m) Sidehull Draft (m) Total Beam (m) Power for 30 knots (MW) Mass Grp 1 – Structure (tonnes) Mass Grp 2 - Personnel (tonnes) Mass Grp 3 - Systems (tonnes) Mass Grp 4 - Propulsion (tonnes) Mass Grp 5 - Electrical (tonnes) Mass Grp 6 - Payload (tonnes) Mass Grp 7 - Variables (tonnes) Value 1478 118.3 6.9 7.0 3.5 34.5 0.73 1.9 20.6 9.74 664.0 25.3 203.6 160.8 52.4 133.8 237.4 4.2.1 TriSWACH Table 3 contains the key characteristics of the TriSWACH solution designed to the common design specifications given in Section 4.2. Table 1. TriSWACH key characteristic Property Total Displacement (m3) Mainhull Length (m) Mainhull Beam (m) Mainhull Depth (m) Sidehull Length (m) Sidehull Beam (m) Sidehull Draft (m) Bulb Length (m) Bulb Diameter (m) Strut Length (m) Strut Beam (m) Total Beam (m) Power for 30 knots (MW) Mass Grp 1 – Structure (tonnes) Mass Grp 2 - Personnel (tonnes) Mass Grp 3 - Systems (tonnes) Mass Grp 4 - Propulsion (tonnes) Mass Grp 5 - Electrical (tonnes) Mass Grp 6 - Payload (tonnes) Mass Grp 7 - Variables (tonnes) Value 1556 96.1 4.2 2.1 50.8 0.55 2.7 96.3 4.4 67.3 2.2 35.3 14.30 653.1 25.3 224.6 138.3 70.4 133.8 310.5 4.2.2 Trimaran Table 2 contains the key characteristics of the trimaran solution designed to the common design specifications given in Section 4.2. 750 4.3 TriSWACH Stability During the development of the initial design options for both the trimaran and TriSWACH the geometry of the three © 2011 American Society of Naval Engineers hulls and the side hulls separation were modified to ensure sufficient stability. At the very early stage this only consisted of consideration of the vessels intact metacentric height. Clearly for a novel vessel shape such as the TriSWACH ensuring that large angle stability results are also acceptable is of upmost importance. However, when the TriSWACH options were examined their GZ curves were found to be unsatisfactory, with a significant re-entrant feature that occurred above six degrees of heel (associated with sidehull emergence) that led to negative values of righting lever. Fig. 4 shows the GZ curve for one of the TriSWACH point designs that was developed. Fig. 5 shows how, for this TriSWACH point design, side hull emergence occurs at these relatively low angles. 5.0 PARAMETRIC TOOL UNDER DEVELOPMENT The difficulty presented by the TriSWACH stability issue prompted a recognition that a parametric, geometry based design tool able to rapidly explore a range of possible options would be necessary to better examine future alternatives. The initial concepts used to develop this tool were derived from an existing ship design tool framework developed by the UK Ministry of Defence that uses a combination of ship design/analysis tools linked to optimisation and concept exploration techniques (Cooper et al. 2007; Horner, 2009). These tools aim to support early stage design exploration by allowing a designer too quickly: explore the design space for a given set of capabilities; identify the capabilities; enable informed decisions to be made during subsequent, more detailed design stages. 5.1 cost implications of the different Implementation Details The implementation presented in this early stage does not have a complete ship synthesis capability (as presented by Cooper et al. (2007) and Horner (2009)). It is envisaged that this capability will be added in a later stage of the research. The specific implementation relies upon two separate computer programs: Fig. 4. Initial TriSWACH GZ curve. Paramarine – which provides a geometric modelling capability together with a range of naval architectural analysis capabilities (i.e. large angle stability analysis); Matlab – which was employed as an external control interface able to drive changes to the Paramarine ship model. These two tools are considered to provide the potential for future development. The current ship model contained within Paramarine could be enhanced to represent other areas of interest (e.g. sizing, layout, structures). Matlab provides diverse optimisation and analysis techniques should these features be required in any later version of the control interface. 6.0 Fig. 5. TriSWACH sidehull emergence. It should be noted that this is not a general result for all TriSWACH vessels. Rather, the particular geometry style adopted within the initial numerical sizing model fails to produce a solution with acceptable large angle stability behaviour, even though its small angle behaviour satisfies an applicable criterion (albeit one intended for monohull ship). Clearly, this behaviour is undesirable and options for exploring possible amelioration strategies were studied. This led to the development of a parametric tool able to examine the impact of modifying different aspects of the hullforms geometry. © 2011 American Society of Naval Engineers EXAMPLE APPLICATION OF PARAMETRIC TOOL - INITIAL STABILITY STUDY An initial demonstration of the tool was conducted to explore the tool’s application to resolving the transverse stability issues associated with the TriSWACH. In this case the amount of side hull flare/tumblehome and the haunch width/box width ratio were explored using the proposed tool. The impact of these variations upon several key design parameters was examined. The side hull flare/tumblehome angle (β) was varied between ten degrees of flare (β=-15deg) and forty degrees of tumblehome (β=40deg). The haunch width to box width ratio (Hw) was varied between minimal haunches (Hw=0.10) and haunches extending almost the full width of the underside of the box (Hw=0.99). The range of options that were considered are illustrated in Fig. 6. 751 β=-15 deg β=12.5 deg Side hull flare / tumblehome β=40 deg Hw=0.10 Hw=0.55 Hw=0.99 Haunch width / Box width Fig. 6. Illustration of variation in haunch and box width. Using the range of geometries illustrated in Fig. 6 a matrix of intermediate points were examined to determine how different design parameters varied. In this initial study the parameters considered included: structural mass; vertical centre of gravity; righting lever up to an angle of heel of 30 degrees. Fig. 7 shows an example of initial outputs generated by this tool. Fig. 7(a) indicates how structural mass changes with the overall geometry while Fig. 7(b) shows how the change in structural mass would lead to a shift in the vessels overall vertical centre of gravity. As would be expected, increasing tumblehome reduces the breadth of the upper decks, which causes a considerable decrease in their structural weight. The removal of this weight from high in the ship also causes a reduction in position of the vessels vertical centre of gravity. Next, Fig. 8 shows the variation in GZ against heel angle for a range of values of side hull flare/tumblehome and at different haunch width/box width ratios. It is important to note that the options in Figure 8(a), representing low values of haunch width, all experience a significant reentrant GZ curve. This is denoted through the darkly shaded region on the graph. Increasing the size of any haunch significantly diminishes the extent of this region, leading to more acceptable stability characteristics. Side hull flare/tumblehome angle has a less pronounced effect. 752 (a) Structural weight (te) (b) Vertical centre of gravity (m) Fig. 7. Example of initial outputs. © 2011 American Society of Naval Engineers (a) Haunch width / box width = 0.1 Fig. 9. Improve GZ curve (with sidehull flare of 15 degrees, haunch width and box width ration of 0.99). 7.0 CONCLUSIONS The early vessel sizing studies presented in Section 4 have illustrated that the TriSWACH hullform could present an alternative to existing hullforms. However, the issues arising with the assessment of the TriSWACH large angle stability highlight the importance of ensuring all aspect of any design be reassessed to ensure unexpected issues do not arise (b) Haunch width / box width = 0.52 The proposed parametric tool introduced in Section 5 provides a mechanism for rapidly exploring the effect of variations to a number of different design variables. With an appropriately constructed ship model, this provides the designer with a tool able to develop variations from a point design allowing the rapid development of an acceptable solution. For a radical alternative, like the TriSWACH, such a tool allows examination of the wider consequences of design choices. 7.1 Future Work Further work is required to better quantify the powering and seakeeping performance of the TriSWACH hullform, compared to monohull and trimaran alternatives. Two key areas of future work at UCL have been identified: (c) Haunch width / box width = 0.99 Fig. 8. Example of initial outputs. Figure 9 shows the GZ curve for one improved solution, further work is required to fully remedy the re-entrant GZ curve. It would be interesting to investigate the impact of deeper sidehulls and/or larger displacement sidehulls on these results. © 2011 American Society of Naval Engineers Exploration of hydrostatic and hydrodynamic trade-offs in the TriSWACH design space; Exploration of marine engineering systems options on the TriSWACH design space. It is envisaged that these elements of work will be undertaken as part of a continued research programme undertaken by UCL and the other ACCeSS partners. Further development of the explorative parametric tool presented here will be conducted to assist meeting these research goals. 753 REFERENCES Andrews, D.J. & Pawling, R. (2009). “The Ship Design Challenge of Unmanned Aerial Vehicles.” Proceedings of Warship 2009: Airpower at Sea, RINA, 17-18 June 2009, London, UK. Andrews, D.J. (2004). “Multi-Hulled Vessels.” Ship Design and Construction, Lamb, T (editor), Chap. 46, Vol. 2, ISBN 0-939773-41-4, Jersey City, NJ. SNAME. Boulby, R., Stiven, T., Burvill, J., & Thorp, B. (2000). TriSWACH ASW Frigate, Ship Design Exercise Report, Department of Mechanical Engineering, MSc Naval Architecture and Marine Engineering, University College London Cheng, F., Mayoss, C. & Blanchard, T. (2004) “The Development of Trimaran Rules”, Proceedings of the International Conference on the Design and Operation of Trimaran Ships, RINA, London, UK. Cooper, S.L.; Burger, D.P. G.; & McDonald, T.P. (2007) “Concepts for a Fleet Tanker: An Exploration into Options and Pricing”, Proceedings of the International Conference on Conference on Military Support Ships, RINA, London, UK. Dubrovsky, V. (2004). Ships with Outriggers. ISBN 978-09742019-0-0, Backbone Publishing Company, NJ. Dubrovsky, V. & Lyakhovitsky, A. (2001). Multi-Hull Ships. ISBN 0-9644311-2-2, Backbone Publishing Company, NJ. Horner, D. (2009). “Design Space Exploration Using Paramarine and modeFRONTIER”, ONR/NAVSEA Ship Design Process Workshop, Carderock, M. Horner, D. (2009). “Design Space Exploration Using Paramarine and modeFRONTIER”, ONR/NAVSEA Ship Design Process Workshop, Carderock, M. Kennell, C. (1992). SWATH Ships, Technical and Research bulletin No. 7-5, SNAME, Jersey City, NJ. Lloyd’s Register, (2006), Rules & Regulations for the Classification of Trimarans, Lloyd’s Register, London. 754 Grafton, T.J. (2007), The Roll Motion of Trimaran Ships, PhD Thesis, University College London, London. Min-tong, G.U., Zheng, F. & Yong-ming, Q.I.U. (2004). “Research on the Resistance Test of Trimaran Small Waterplane Area Center Hull.” Journal of Shanghai Jiaotong University, 8, pp.1222 -1225. McDonald, T.P. (2010) A Library Based Approach for Exploring Style in Preliminary Ship Design, PhD Thesis, University College London, London, Dec, 2010. Onas, A.S., (2009) Nonlinear Roll Motions of a FrigateType Trimaran and Susceptibility to Parametric Roll Resonance, PhD Thesis, Stevens Institute of Technology, NJ, Dec, 2009. Smith, T., Morley, J., Burley. N. (2004). TriSWACH Offshore Patrol Vessel, Ship Design Exercise Report, MSc Naval Architecture and Marine Engineering, Department of Mechanical Engineering, University College London UCL (2011a). MSc Ship Design Procedure. Department of Mechanical Engineering, University College London. UCL (2011b). MSc Ship Design Procedure. Department of Mechanical Engineering, University College London. ACKNOWLEDGEMENTS This work forms part of the ACCeSS project which is supported by a grant from the US of Naval Research (ONR Award No. N00014-10-1-0652). The assistance and support of Dr Paul Rispin and Ms Kelly Cooper is gratefully recognized. The authors would also like to acknowledge the input of the other ACCeSS partners to the study described in this paper. Particularly Raju Datla and the other researchers from Stevens Institute of Technology who provided experimental TriSWACH resistance data that was employed in the vessel sizing studies. © 2011 American Society of Naval Engineers
 0
0
advertisement

Download
advertisement
Add this document to collection(s)
You can add this document to your study collection(s)
Sign in Available only to authorized usersAdd this document to saved
You can add this document to your saved list
Sign in Available only to authorized users