Copyright © 2016 American Scientific Publishers
All rights reserved
Printed in the United States of America
Journal of
Computational and Theoretical Nanoscience
Vol. 13, 1–9, 2016
An Efficient Computational Method for Handling
Singular Second-Order, Three Points Volterra
Integrodifferential Equations
Morad Ahmad1 , Shaher Momani2 3 ∗ , Omar Abu Arqub4 , Mohammed Al-Smadi5 , and Ahmed Alsaedi3 6
1
Department of Basic Sciences, King Abdullah II Faculty of Engineering,
Princess Sumaya University for Technology, Amman 11941, Jordan
2
Department of Mathematics, Faculty of Science, The University of Jordan, Amman 11942, Jordan
3
Nonlinear Analysis and Applied Mathematics Research Group, Faculty of Science,
King Abdulaziz University, Jeddah 21589, Saudi Arabia
4
Department of Mathematics, Faculty of Science, Al-Balqa Applied University, Salt 19117, Jordan
5
Department of Applied Science, Ajloun College, Al-Balqa Applied University, Ajloun 26816, Jordan
6
Department of Mathematics, Faculty of Science, King Abdulaziz University, Jeddah 21589, Saudi Arabia
RESEARCH ARTICLE
In this paper, a powerful computational algorithm is developed for the solution of classes of singular second-order, three-point Volterra integrodifferential equations in favorable reproducing kernel
Hilbert spaces. The solutions is represented in the form of series in the Hilbert space W23 0 1
with easily computable components. In finding the computational solutions, we use generating the
orthogonal basis from the obtained kernel functions such that the orthonormal basis is constructing in order to formulate and utilize the solutions. Numerical experiments are carried where two
smooth reproducing kernel functions are used throughout the evolution of the algorithm to obtain
the required nodal values of the unknown variables. Error estimates are proven that it converge to
zero in the sense of the space norm. Several computational simulation experiments are given to
show the good performance of the proposed procedure. Finally, the utilized results show that the
present algorithm and simulated annealing provide a good scheduling methodology to multipoint
singular boundary value problems restricted by Volterra operator.
Keywords: Reproducing Kernel Method, Multipoint Boundary Conditions, Singular Boundary
Value Problem, Integrodifferential Equation of Volterra Type.
1. INTRODUCTION
The multipoint singular boundary value problems (BVPs)
arise in a variety of differential applied mathematics and
physics such as gas dynamics, nuclear physics, chemical reaction, studies of atomic structures, and atomic calculations. For instance, the vibrations of a guy wire of
uniform cross-section and composed of N parts of different densities can be set up as a multipoint singular
BVP as in Ref. [1]. Many problems in the theory of
elastic stability can be handled using multipoint singular BVPs as in Ref. [2]. In optimal bridge design, large
size bridges are sometimes contrived with multipoint supports, which corresponds to a multipoint singular BVP as
in Ref. [3]. Therefore, it appears to be very important to
∗
Author to whom correspondence should be addressed.
J. Comput. Theor. Nanosci. 2016, Vol. 13, No. 10
develop numerical or analytical methods for solving such
problems.
Most scientific problems and phenomenons in different fields of sciences and engineering occur nonlinearly
with a set of finite singularity. To set the scene, we know
that except a limited number of these problems and phenomenons, most of them do not have analytical solutions. So these nonlinear singular equations should be
solved using numerical methods or other analytical methods. Anyhow, when applied to the multipoint singular
BVPs, classical numerical methods designed for regular
BVPs suffer from a loss of accuracy or may even fail to
converge,4–6 because of the singularity; whilst analytical
methods commonly used to solve nonlinear singular differential equations are very restricted and numerical techniques involving discretization of the variables on the other
hand gives rise to rounding off errors. As a result, there are
1546-1955/2016/13/001/009
doi:10.1166/jctn.2016.5782
1
An Efficient Computational Method for Handling Volterra Integrodifferential Equations
some restrictions to solve these multipoint singular BVPs,
firstly, we encountered with the nonlinearity of equations,
secondly, these equations are singular BVPs with multipoint boundary conditions.
The aim of this work is to give an effective algorithm for
solving second-order singular ordinary differential equations subject to three-point boundary conditions based on
the reproducing kernel theory. More specifically, we provide the analytical-numerical solutions for the following
singular differential-operator equation:
u x +
ax bx
u x +
ux
px
qx
= Tux + f x ux
x
Tux = kx tGut dt
(1)
0
subject to the three-point boundary conditions
u0 = 0
RESEARCH ARTICLE
u1 − u = 0
0 < < 1
> 0
< 1
(2)
where 0 < t < x < 1, kx t is a continuous arbitrary kernel function over the square 0 < t < x < 1, u ∈ W23 0 1
is an unknown function to be determined, f x w1 , and
Gw2 are continuous terms in W21 0 1 as wi = wi x ∈
W23 0 1, 0 ≤ x ≤ 1, − < wi < , i = 1 2, and W21 0 1,
W23 0 1 are reproducing kernel spaces. Here, the two realvalued functions px, qx are continuous and may be
equal to zero at xi m
i=1 ∈ 0 1 which make Eq. (1) to be
singular at x = xi , while on the other hand, ax bx are
continuous real-valued functions on 0 1.
Investigation about second-order, three-point singular
BVPs restricted by Volterra operator numerically is scarce
and missing, but on the other side, the solvability analysis of second-order, three-point singular BVPs have been
studied by many authors. The reader is asked to refer to
Refs. [7–12] in order to know more details about these
analyzes, including their modifications and conditions for
use, their scientific applications, their importance and characteristics, their relationship including the differences, and
others.
Reproducing kernel theory has important application
in numerical analysis, computational mathematics, image
processing, machine learning, finance, and probability
and statistics.13–16 Recently, a lot of research work has
been devoted to the applications of the RKHS algorithm
for wide classes of stochastic and deterministic problems involving operator equations, differential equations,
integral equations, and integro-differential equations. The
RKHS algorithm was successfully used by many authors
to investigate several scientific applications side by side
with their theories. The reader is kindly requested to go
through17–37 in order to know more details about the RKHS
algorithm, including its modification and scientific applications, its characteristics and symmetric kernel functions,
and others.
2
Ahmad et al.
The plan of the paper is the following: in Section 2, an
algorithm for solving Eqs. (1) and (2) in the space W23 0 1
is introduced. In Section 3, two reproducing kernel functions are building in appropriate inner product spaces in
order to apply our algorithm. In Section 4, the GramSchmidt orthogonalization process is introduced in order to
provide the theoretic basis of the algorithm. In Section 5,
the n-truncation numerical solution is proved to converge
to the analytical solution uniformly, whilst an error bound
is provided for the present RKHS algorithm. Numerical
results are presented in Section 6. Finally, in Section 7
some concluding remarks are presented.
2. SOLUTION REPRESENTATION WITH
PROBLEM FORMULATION
Problem formulation is normally the most important part
of the process. It is the determination of the discretized
representation of Eq. (1), the construction of the appropriate reproducing kernel spaces, the selection of the smooth
kernel functions, and the separation of multipoint boundary conditions of Eq. (2).
Anyhow, in order to apply our RKHS algorithm, we
multiplying both sides of Eq. (1) by pxqx to obtain
the following realistic equivalent form:
P xu x + Qxu x + Rxux
= F x ux Tux
(3)
such that F x ux Tux = pxqxTux +
f x ux, P x = pxqx, Qx = axqx, and
Rx = bxpx. Obviously, the form of Eqs. (1) and (3)
are equivalent; therefore, it suffices for us to solve Eq. (3)
subject to multipoint boundary conditions of Eq. (2).
Actually, it is very difficult to expand the application
of RKHS algorithm to three-point boundary conditions
directly, since it is very difficult to obtain a reproducing kernel function that satisfying these points. Next, we
shall introduce an effective iterative algorithm for solving second-order, three-point singular BVPs restricted by
Volterra operator.
Algorithm 1. To evaluate the analytical-numerical
solutions of Eqs. (2) and (3):
Step A: Construct the auxiliary two-point boundary conditions as
u0 = 0 u1 = where is constant to be determined.
Step B: Solve the following equation
algorithm:
via
RKHS
P xu x + Qxu x + Rxux
= F x ux Tux
(4)
subject to the two-point boundary conditions
u0 = 0
u1 = (5)
J. Comput. Theor. Nanosci. 13, 1–9, 2016
Ahmad et al.
An Efficient Computational Method for Handling Volterra Integrodifferential Equations
Step C: To complete the detailed process, do steps (I, II,
III, IV) in the following subroutine:
Step I: Define a new unknown function as
vx = ux − x
where x satisfies 0 = 0 and 1 = . Hence,
x = x and vx = ux − x.
Step II: The shape of Eq. (4) with two-point boundary
conditions of Eq. (5) can be equivalently reduced to
finding vx that satisfying the equation
P xv x + Qxv x + Rxvx
= F x v + x Tv + x
− Q + Rx
(6)
subject to the homogeneous two-point boundary
conditions
v0 = 0 v1 = 0
(7)
Step III: Using RKHS algorithm, the analyticalnumerical solutions of Eqs. (6) and (7) can be obtained,
respectively, as
vx =
i
ik F xk v + xk T v + xk i=1 k=1
− Q + Rxk ¯ i x
vn x =
n i
ik F xk v + xk T v + xk − Q + Rxk ¯ i x
where ik are orthogonalization coefficients and ¯ i x
are orthonormal functions system.
Step IV: The analytical-numerical solutions of Eqs. (2)
and (3) can be immediately obtained as
ux = x +
i
In this section, a method for constructing a reproducing kernel function that satisfying the two-point boundary conditions v0 = 0 and v1 = 0 is presented. By
applying some good properties of the reproducing kernel space, a very simple numerical method is provided
for obtaining approximation to the solution of Eqs. (3)
and (2).
Prior to discussing the applicability of the RKHS algorithm on solving second-order, three-point singular BVPs
restricted by Volterra operator and their associated numerical algorithm, it is necessary to present an appropriate
brief introduction to preliminary topics from the reproducing kernel theory.
Definition 1 (Lin et al. (2006)). Let be a Hilbert
space of function → on a set . A function
× → is a reproducing kernel of if the following conditions are satisfied. Firstly, · x ∈ for each
x ∈ . Secondly, · · x = x for each ∈ and
each x ∈ .
To solve Eqs. (6) and (7) using RKHS algorithm,
we first define and construct a reproducing kernel space
W23 0 1 in which every function satisfies the two-point
boundary conditions v0 = 0 and v1 = 0. After that, we
utilize a reproducing kernel space W21 0 1.
Definition 2. The space W23 0 1 is defined as
3
W2 0 1 = v v v v are absolutely continuous on 0 1,
v v v v ∈ L2 0 1, and v0 = 0 v1 = 0. On the
other hand, the inner product and the norm in W23 0 1 are
defined, respectively, by
vx wxW23 =
+
ik F xk uxk Tuxk − Q + Rxk ¯ i x
n i
and v
W23 =
i=1 k=1
− Q + Rxk ¯ i x
Step D: Incorporate the three-point boundary conditions
of Eq. (2) into un x, it follows that
un 1 − un = 0
(8)
Step E: Solve the linear system of Eq. (8), the n-term
numerical solution un x for Eqs. (1) and (2) are obtained.
We mention here that, the detail mathematical descriptions of Step III and Step IV in the aforementioned subroutine of Step C can be found in detailed in Section 4.
J. Comput. Theor. Nanosci. 13, 1–9, 2016
1
0
v xw x dx
(9)
vx vxW23 , where v w ∈ W23 0 1.
The Hilbert space W23 0 1 is called a reproducing
kernel if for each fixed x ∈ 0 1, there exist R1 x y ∈
1
W23 0 1 (simply R1
x y) such that vy Rx yW23 =
3
vx for any vy ∈ W2 0 1 and y ∈ 0 1.
ik F xk uxk Tuxk un 0 = 0
vi 0w i 0
i=0
i=1 k=1
un x = x +
2
Theorem 1. The Hilbert space W23 0 1 is a complete
reproducing kernel with reproducing kernel function
⎧
2
⎪
⎪ a1 x + a2 xy + a3 xy
⎪
⎪
⎪
⎨ + a4 xy 3 + a5 xy 4 + a6 xy 5 y ≤ x
y
=
R1
x
2
⎪
⎪
⎪ b1 x + b2 xy + b3 xy
⎪
⎪
⎩
+ b4 xy 3 + b5 xy 4 + b6 xy 5 y > x
(10)
where ai x and bi x, i = 1 2 6 are unknown coefficients of R1
x y and are given as
3
RESEARCH ARTICLE
i=1 k=1
3. THE STRUCTURE OF APPROPRIATE
INNER PRODUCT SPACES AND THE
MAIN RESULTS
An Efficient Computational Method for Handling Volterra Integrodifferential Equations
ai ’s coefficients
bi ’s coefficients
a1 x = 0
1
x−36 + 30x + 10x 2 − 5x3 + x4 156
1
x120 − 126x + 10x2 − 5x3 + x4 a3 x = −
624
1
x120 − 126x + 10x2 − 5x3 + x4 a4 x = −
1872
1
a5 x =
x−36 + 30x + 10x2 − 5x3 + x4 3744
1
156 − 120x − 30x2 − 10x3 + 5x4 − x5 a6 x =
18720
Proof. The proof of the completeness and reproducing property of W23 0 1 is similar to the proof in
Ref. [18]. Now, let us find out the expression form of
1
in the space W23 0 1. It is easy to see that
R1x y
2
y=1
i i
5−i 1
v yy3 R1
i=0 −1 v yy Rx yy=0 −
x y dy =
01
vyy6 R1
x y dy. From Eq. (9), one can write
0
vy R1
x yW23
2
RESEARCH ARTICLE
+
i+1 5−i 1
vi 0yi R1
y Rx 0
x 0 + −1
2
−1i vi 1y5−i R1
x 1
i=0
−
1
0
vyy6 R1
x y dy
(11)
3
1
Since R1
x y ∈ W2 0 1, it follows that Rx 0 = 0
3
1
and Rx 1 = 0. Again, since vx ∈ W2 0 1, it yield
that v0 = 0 and v1 = 0. On the other hand, if
3 1
2 1
3 1
y4 R1
x 1 = 0, y Rx 1 = 0, y Rx 0 − y Rx 0 = 0,
1 1
4 1
and y Rx 0 + y Rx 0 = 0, then Eq. (11) implies that
1
6 1
vy R1
x yW23 = 0 vy−y Rx y dy. Now, for any
1
x ∈ 0 1, if Rx y satisfies
y6 R1
x y = −x − y
Definition 3 (Lin et al. (2006)). The space W21 0 1
is defined as W21 0 1 = v v is absolutely continuous on
0 1 and v ∈ L2 0 1. On the other hand, the inner product and the norm in W21 0 1 are defined, respectively, by
vx wxW21 = v0w0 +
and v
W21 =
i=0
dirac-delta function
(12)
1
then vy R1
x yW23 = vx. Clearly, Rx y is the
reproducing kernel function of the space W23 0 1. The
auxiliary formula of Eq. (12) is 6 = 0, so, let the expression form of R1
x y be as defined in Eq. (10). For Eq. (12)
m 1
m 1
let R1
x y satisfy y Rx x + 0 = y Rx x − 0, m =
6 1
0 1 2 3 4. Integrating y Rx y = −x − y from x − to x + with respect to y and let → 0, we have the
5 1
jump degree of y5 R1
x y at y = x given by y Rx x +0−
5 1
y Rx x − 0 = −1. Through the last descriptions and by
using MAPLE 13 software package, the unknown coefficients ai x and bi x, i = 1 2 6 of Eq. (10) can be
obtained. 4
1 5
x 120
1
x−72 + 60x + 20x2 + 3x3 + 2x4 b2 x = −
312
1
x120 − 126x − 42x2 − 5x3 + x4 b3 x = −
624
1
x120 + 30x + 10x2 − 5x3 + x4 b4 x = −
1872
1
x120 + 30x + 10x2 − 5x3 + x4 b5 x =
3744
1
x120 + 30x + 10x2 − 5x3 + x4 .
b6 x = −
18720
b1 x =
a2 x = −
=
Ahmad et al.
1
0
v xw x dx
vx vxW21 , where v w ∈ W21 0 1.
Theorem 2 (Lin et al. (2006)). The Hilbert space
W21 0 1 is a complete reproducing kernel with reproducing kernel function
1 + y y ≤ x
2
Rx y =
1 + x y > x
4. THEORETIC BASIS OF THE
RKHS ALGORITHM
Here, the formulation of a differential linear operator
is presented in W23 0 1. After that, we use the GramSchmidt orthogonalization process on the orthonormal
3
system ¯ i x
i=1 and normalizing them on W2 0 1 to
obtain the required orthogonalization coefficients in order
to obtain the analytical-numerical solutions of Eqs. (6)
and (7) using RKHS algorithm.
Let us consider the differential operator L W23 0 1 →
1
W2 0 1 such that Lvx = P xv x + Qxv x +
Rxvx. Thus, Eqs. (6) and (7) can be equivalently converted into the form:
Lvx = F x v + x T v + x
− Q + Rx
(13)
with respect to the two-point boundary conditions
v0 = 0
v1 = 0
(14)
Theorem 3. The operator L W23 0 1 → W21 0 1 is
bounded and linear.
J. Comput. Theor. Nanosci. 13, 1–9, 2016
Ahmad et al.
An Efficient Computational Method for Handling Volterra Integrodifferential Equations
Proof. Clearly, Lv
2W 1 ≤ M
v
2W 3 , where M > 0.
2
2
From the definition of W21 0 1, we have Lv
2W 1 =
2
1
Lvx LvxW21 = Lv02 + 0 Lv x2 dx. By the
Schwarz inequality and reproducing properties vx =
1
vy R1
x yW23 , Lvx = vy LRx yW23 , and
1 Lv x = vy LRx yW23 , we get
v 0 =
v 02 ≤
= v
W23 1
0
v p dp ≤
≤
= M1 v
W23
= M2 v
W23
where Mi > 0, i = 1 2. Thus, Lv
2W 1 = Lv02 +
2
1
2
2
2
2
Lv
x
dx
≤
M
+
M
v
.
The
linearity part is
3
1
2
0
W2
obvious. To construct an orthogonal function system of W23 0 1;
∗
put i x = R2
xi x and i x = L i x, where xi i=1
∗
is dense on 0 1 and L is the adjoint operator of L.
In other words, vx i xW23 = vx L∗ i xW23 =
Lvx i xW21 = Lvxi , i = 1 2 The orthonormal
function system ¯ i x
i=1 can be derived from the GramSchmidt orthogonalization process of i x
i=1 as
¯ i x =
i
ik k x
(15)
k=1
2
Lemma 1. If v ∈ W23 0 1, then vx ≤ 7/2
v
W23 ,
v x ≤ 3
v
W23 , and v x ≤ 2
v
W23 .
x
Proof. Noting that v x − v 0 = 0 v pdp, where
v x is absolute continuous on 0 1. If this is integrated again from 0 to x, the
result is v x itself as;
x z v x − v 0 − v 0x = 0 0 vs pdp dz. Again, inte
grated from 0 to
x x,
w yield
z that vx − v0 − v 0x −
2
1/2v 0x = 0 0 0 v pdp dzdw. So, vx ≤
1
v0 + v 0x + 1/2v 0x2 + 0 v pdp or
1
vx ≤ v0 + v 0 + 1/2v 0 + 0 v pdp. By
using Holder’s inequality and Eq. (9), we can note the
following relation inequalities:
1
2 i
v 02 + v x2 dx
v0 = v2 0 ≤
i=0
= v
W23 v 0 =
v 02 ≤
2
0
vi 02 +
i=0
= v
W23 J. Comput. Theor. Nanosci. 13, 1–9, 2016
1
0
2
v p2 dp
vi 02 +
i=0
0
v x2 dx
1
0
1
1
0
12 dp
v x2 dx = v
W23
Thus, vx ≤ 7/2
v
W23 . For the second part, since
x
z
v x = v 0 + v 0x + 0 0 v pdp dz, this means
1
that v x ≤ v 0 + v 0 + 0 v pdp. Thus, one
can find v
x ≤ 3
v
W23 . In the third part, clearly, v x−
x
v 0 = 0 v pdp, which yield that v x ≤ v 0 +
1 v pdp. Hence, one can write v x ≤ 2
v
W23 0
Theorem 4. If xi i=1 is dense on 0 1, then i xi=1
3
is a complete function system of the space W2 0 1.
Proof. Clearly,
i x = L∗ i x = L∗ i x
1
1
Rx yW23 = i x Ly R1
x yW21 = Ly Rx yy=xi ∈
3
1
W2 0 1, so, i x = Ly Rx yy=xi . For each fixed v ∈
W23 0 1, let vx i xW23 = 0, so, vx i xW23 =
vx L∗ i xW23 = Lvx i xW21 = Lvxi = 0. But
since xi i=1 is dense on 0 1, therefore Lvx = 0.
It follows that vx = 0 from the existence of L−1 5. IMPLEMENTATION OF THE
ITERATIVE METHOD
In this section, a procedure of obtaining the analytical
solution of Eqs. (13) and (14) is represented in the series
form in the space W23 0 1, whilst, the numerical solution
is obtained by taking finitely many terms in this series
representation form. After that, the numerical solution and
its first (second) derivative are proved to converging uniformly to the analytical solution and its first (second)
derivative, respectively.
¯
Theorem 5. For each v ∈ W23 0 1, i=1 vx i x ·
¯
i x is convergent in the sense of the norm of W23 0 1.
On the other hand, if xi i=1 is dense on 0 1, then the
analytical solution of Eqs. (13) and (14) is
vx =
i
ik F xk v + xk T v + xk i=1 k=1
− Q + Rxk ¯ i x
(16)
Proof. Using Eq. (15), it easy to see that
vx = L−1 F x v + x T v + x
b
a
− Q + Rx
v x2 dx
=
vx ¯ i xW23 ¯ i x
i=1
5
RESEARCH ARTICLE
where ij = 1/
1 W23 for i = j = 1, ij = 1/
2
¯
i 2W 3 − i−1
for i = j = 1,
k=1 i x k xW23 2
i−1
2
and ij = −1/ i W 3 − k=1 cik 2 × i−1
k=j i x
2
¯ k xW 3 kj for i > j.
vi 02 +
i=0
1
Lvx = vx LR1
x xW23 ≤ LRx W23 v
W23
1 Lv x = vx LR1
x xW23 ≤ LRx W23 v
W23
2
An Efficient Computational Method for Handling Volterra Integrodifferential Equations
=
i
ik vx k xW23 ¯ i x
i=1 k=1
=
i
ik vx L∗ k xW23 ¯ i x
i=1 k=1
=
i
ik Lvx k xW21 ¯ i x
i=1 k=1
=
i
ik F x v + x T v + x
i=1 k=1
− Q + Rx k xW21 ¯ i x
=
i
ik F xk v + xk T v + xk i=1 k=1
− Q + Rxk ¯ i x
Hence, Eq. (16) is the analytical solution of Eqs. (13)
and (14). Let ¯ i x
i=1 be the normal orthogonal system derived
from the Gram-Schmidt orthogonalization process of
i x
i=1 , then according to Eq. (16) , the analytical solution of Eqs. (13) and (14) can be denoted by
vx =
Bi ¯ i x
(17)
RESEARCH ARTICLE
i=1
where Bi = ik=1 ik F xk vk−1 + xk T vk−1 +
xk − Q + Rxk . In fact, Bi in Eq. (17) are
unknown, we will approximate Bi using known Ai . For
a numerical computations, we define the initial function
v0 x1 = 0, put v0 x1 = vx1 , and define the n-term
approximation vn x to vx as
vn x =
n
Ai ¯ i x
(18)
i=1
Ai =
i
ik F xk vk−1 + xk T vk−1 + xk k=1
− Q + Rxk (19)
The convergence of the analytical-numerical solutions
will discuss next. For any x ∈ 0 1 and according to
Lemma 1, we get
vni x − vi x ≤ Mi vn − v
W23 i = 0 1 2
(20)
where M0 = 7/3, M1 = 3, M2 = 2. Hence, if
vn − v
W23 → 0 as n → , the numerical solution vn x
and vni x, i = 0 1 2 are converge uniformly to the analytical solution vx and vi x, i = 0 1 2, respectively.
Theorem 6. vn satisfies Lvn xj = F xj vj−1 + xj ,
T vj−1 + xj − Q + Rxj , j = 1 2 3 6
Ahmad et al.
Proof. If Ai = ik=1 ik F xk vk−1 + x
k T vk−1 +
xk − Q + Rxk , then vn x = ni=1 Ai ¯ i x.
Combining the reproducing and symmetric
properties
n
y,
it
follows
that
Lv
x
=
A
L
¯ x =
of R1
n x
nn j ¯ i=1 ∗i i j
¯
1
A
L
x
x
=
A
x
L
x
i
i
j
W2
i
W23 =
i=1 i
j
i=1
n
¯
i=1 Ai i x j xW23 . Using the orthogonality of
j
¯ i x
, yields that l=1 jl Lvn xl = ni=1 Ai ¯ i x
i=1
n
j
j
¯
¯
l=1 jl l xW23 =
l=1 jl ×
i=1 Ai i x j xW23 =
F xl vl−1 + xl T vl−1 + xl − Q +
Rxl . Take j = 1, one gets Lvn x1 = F x1 v0 +
x1 T v0 + x1 − Q + Rx1 . Take j = 2,
one gets Lvn x2 = F x2 v1 + x2 T v1 + x2 −
Q + Rx2 . Using mathematical induction, one
get Lvn xj = F xj vj−1 + xj T vj−1 + xj −
Q + Rxj From Eq. (20),
since vn x converge uniformly to
¯
A
vx, vx = i=1 i i x. Therefore, vn x = Pn vx,
where Pn is an orthogonal projector from W23 0 1 to
Span 1 2 n . Thus one can write Lvn xj =
Lvn x j xW21 = vn x L∗j xW23 = Pn vx
j xW23 = vx Pn j xW23 = vx j xW23 =
Lvx j xW21 = Lvxj Theorem 7. If vn−1 − v
W23 → 0, xn → y as n → ,
and F x w1 w2 is continuous in 0 1 with respect
to x wi , i = 1 2, then F xn vn−1 + xn T vn−1 +
xn − Q + Rxn → F y v + y T v +
y − Q + Ry as n → .
Proof. We want to show that vn−1 xn → vy. Since,
vn−1 xn −vy = vn−1 xn −vn−1 y+vn−1 y−vy
≤ vn−1 xn −vn−1 y+vn−1 y−vy
≤ vn−1 xn −y+vn−1 y−vy
lies between xn and y
From Lemma 1, vn−1 y − vy ≤ 7/2
vn−1 − v
W23
which gives vn−1 y − vy → 0 as n → , whilst,
vn−1 ≤ 3
vn−1 W23 . In terms of the boundedness of
vn−1 W23 , we get vn−1 xn − vy → 0 as n → . As
a result, by means of the continuation of F the result is
obtained directly. Theorem 8. If vn W23 is bounded and xi i=1 is dense
on 0 1, then the n-term numerical solution vn x in the
iterative formula of Eq. (18) converges to the analytical
solution vxof Eqs. (13) and (14) in the space W23 0 1
¯
and vx = i=1 Ai i x, where Ai is given by Eq. (19).
Proof. The proof is straightforward. If n = v − vn W23 , where vx and vn x are
given by
and (18), respectively, then
Eqs. ¯(17)
2
2
and 2n−1 =
2n = i=n+1 Ai i W 3 =
i=n+1 Ai 2
Ai ¯ i 2 3 =
Ai 2 . Thus, n−1 ≥ n , and
i=n
W2
i=n
consequently n are monotone decreasing in the
J. Comput. Theor. Nanosci. 13, 1–9, 2016
Ahmad et al.
An Efficient Computational Method for Handling Volterra Integrodifferential Equations
¯
sense of · W23 . By Theorem 5, i=1 Ai i x is conver
2
2
gent, so, n = i=n+1 Ai → 0 or n → 0 as n → .
Example 2. Consider the singularities at two endpoint
of 0 1:
u x −
6. NUMERICAL EXAMPLES
In order to solve multipoint singular BVPs restricted by
Volterra operator numerically and to show behavior, properties, efficiency, and applicability of the present RKHS
algorithm, four multipoint singular BVPs restricted by
Volterra operator will be solved numerically in this section.
Here, all the symbolic and numerical computations were
performed by using MAPLE 13 software package.
Using RKHS algorithm, taking xi = i − 1/n − 1, i =
2
1 2 n, applying R1
x y and Rx y on 0 1 in which
Algorithm 1 is used throughout the computations; some
tabulate data is presented and discussed quantitatively at
some selected grid points on 0 1 to illustrate the numerical solutions for the following multipoint singular BVPs
restricted by the given Volterra operator.
Example 1. Consider the singularities at two endpoint
of 0 1:
u x +
1
x 2 1 − x2
u x +
1
ux
sinhx
= u2 x + sinh−1 ux + Tux + f x
x
Tux = x − tu2 t dt
0
subject to the three-point boundary conditions
u0 = 0
1
u1 − u
=0
2
where 0 < t < x < 1, the analytical solution is ux =
x − 1/22 x − 12 sinhx.
Example 3. Consider the singularities at multipoint of
0 1:
u x +
1
1
u x −
ux = Tux + f x
sinx
xx − 1
x
Tux = x + 1tut dt
1
1
u x + x
ux
xx − 1x − 1/3
e − 1
= coshux + Tux + f x
x
Tux =
coshxu4 t dt
0
0
subject to the three-point boundary conditions
subject to the three-point boundary conditions
u0 = 0
1
u1 − 2u
=0
3
where 0 < t < x < 1, the analytical solution is ux =
xx − 1x − 1/9 cosx.
where 0 < t < x < 1, the analytical solution is ux =
xx − 1/32x 2 − 3x + 1.
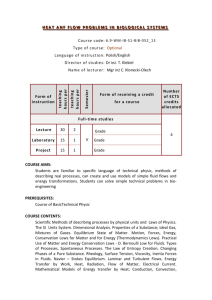
Table I. The analytical-numerical solutions and errors for Example 1.
x
016
032
048
064
080
096
Table II.
x
016
032
048
064
080
096
Exact solution
−0.00648674140330012
−0.04314675763472329
−0.08166976184992833
−0.09774018067274835
−0.07679256174137644
−0.01869522215933257
Numerical solution
−0.00648701932919779
−0.04314697922423827
−0.08166986517758862
−0.09774015978092232
−0.07679247394675902
−0.01869518857715539
Absolute error
−7
Relative error
277926 × 10
221590 × 10−7
103328 × 10−7
208918 × 10−8
877946 × 10−8
335822 × 10−8
428452 × 10−5
513572 × 10−6
126519 × 10−6
213749 × 10−7
114327 × 10−6
179630 × 10−6
Absolute error
Relative error
The analytical-numerical solutions and errors for Example 2.
Exact solution
001310653223586577
000487640352847436
000005393349784172
000173897887325904
000319718153587544
000037729187128320
J. Comput. Theor. Nanosci. 13, 1–9, 2016
Numerical solution
0013106673444133368
0004876573498209635
0000054062551919420
0001739035091758989
0003197173005396070
0000377276827374901
−7
141208 × 10
169970 × 10−7
129054 × 10−8
562185 × 10−8
853048 × 10−9
150439 × 10−8
107739 × 10−5
348556 × 10−5
239284 × 10−3
323285 × 10−5
266812 × 10−6
398734 × 10−5
7
RESEARCH ARTICLE
u0 = 0
1
=0
u1 − 4u
9
An Efficient Computational Method for Handling Volterra Integrodifferential Equations
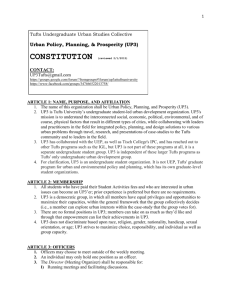
Table III.
The analytical-numerical solutions and errors for Example 3.
x
Exact solution
−001584128000000000
−000104447999999999
000146432000000000
−001978367999999998
−004480000000000005
−002213887999999997
016
032
048
064
080
096
Table IV.
Numerical solution
−0015841501202561670
−0001044838270691351
0001463908889641097
−0019784059627530715
−0044800263728179024
−0022138943318272125
Exact solution
−000193723522905100
000486239935272751
002718301141037295
005591504562239846
006803241039182698
002583677729641778
016
032
048
064
080
096
Numerical solution
−000193715122696797
000486253640369627
002718317043250062
005591520011909257
006803253422667077
002583681728855300
Example 4. Consider the singularities at multipoint of
0 1:
u x +
1
1
u x −
ux
lnx + 1
xx − 1/4x − 1
= uxeux + f x
x
Tux = et+x eut dt
0
RESEARCH ARTICLE
Absolute error
−7
Relative error
221203 × 10
358271 × 10−7
411110 × 10−7
379628 × 10−7
263728 × 10−7
633183 × 10−8
139637 × 10−5
343013 × 10−4
280752 × 10−4
191889 × 10−5
588679 × 10−6
286005 × 10−6
Absolute error
Relative error
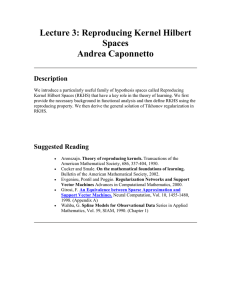
The analytical-numerical solutions and errors for Example 4.
x
subject to the three-point boundary conditions
u0 = 0
1
=0
u1 − 3u
4
where 0 < t < x < 1, the analytical solution is ux =
lnx 2 1 − xx − 1/4 + 1.
Our next goal is to illustrate some numerical results of
the RKHS solutions of the aforementioned examples in
numeric values. In fact, results from numerical analysis
are an approximation, in general, which can be made as
accurate as desired. Because a computer has a finite word
length, only a fixed number of digits are stored and used
during computations. Next, the agreement between the
analytical-numerical solutions is investigated for Examples
1, 2, 3, and 4 at various x in 0 1 by computing the absolute errors and the relative errors of numerically approximating their analytical solutions for the corresponding
equivalent equations as shown in Tables I–IV, respectively.
Anyhow, it is clear from the tables that, the numerical
solutions are in close agreement with the analytical solutions for all examples, while the accuracy is in advanced
by using only few tens of the RKHS iterations. Indeed,
we can conclude that higher accuracy can be achieved by
computing further RKHS iterations.
8
Ahmad et al.
−8
840021 × 10
137051 × 10−7
159022 × 10−7
154497 × 10−7
123835 × 10−7
399921 × 10−8
433618 × 10−5
281859 × 10−5
585006 × 10−6
276306 × 10−6
182023 × 10−6
154788 × 10−6
7. CONCLUDING REMARKS
In this work, we have used the reproducing kernel algorithm for solving linear and nonlinear second-order, threepoint singular BVPs restricted by Volterra operator. In the
meantime, we employed our algorithm and its conjugate
operator to construct the complete orthonormal basis in
the reproducing kernel space W23 0 1. By separating the
multipoint boundary conditions and adding the initial and
boundary conditions to the reproducing kernel space that
satisfying these points, we obtain the analytical-numerical
solutions of the problem. The algorithm is applied in a
direct way without using linearization, perturbation, or any
restrictive assumptions. It may be concluded that RKHS
algorithm is very powerful and efficient in finding the
analytical-numerical solutions for a wide class of multipoint singular BVPs. It is worth mentioning here that the
algorithm is capable of reducing the volume of the computational work and complexity while still maintaining the
high accuracy of the numerical results.
Acknowledgment: The authors express their thanks to
unknown referees for the careful reading and helpful
comments.
References
1. M. Moshinsky, Bol. Soc. Mat. Mexicana 7, 1 (1950).
2. S. Timoshenko, Theory of Elastic Stability, McGraw-Hill, New York
(1961).
3. Y. Lin and J. Lin, Applied Mathematics Letters 23, 997 (2010).
4. U. M. Ascher, R. M. Mattheij, and R. D. Russell, Classics in Applied
Mathematics 13 (1995).
5. O. Abu Arqub, Z. Abo-Hammour, S. Momani, and N. Shawagfeh,
Abstract and Applied Analysis 2012, 25 (2012) Article ID 205391.
6. Z. Abo-Hammour, O. Abu Arqub, O. Alsmadi, S. Momani, and
A. Alsaedi, Applied Mathematics and Information Sciences 8, 2809
(2014).
7. C. P. Gupta, Journal of Mathematical Analysis and Applications
205, 586 (1997).
J. Comput. Theor. Nanosci. 13, 1–9, 2016
Ahmad et al.
An Efficient Computational Method for Handling Volterra Integrodifferential Equations
8. H. B. Thompson and C. Tisdell, Mathematical and Computer Modelling 34, 311 (2001).
9. P. Singh, Applied Mathematics Letters 17, 969 (2004).
10. R. Ma and D. O’Regan, Journal of Mathematical Analysis and
Applications 301, 124 (2005).
11. F. Geng, Applied Mathematics and Computation 215, 2095 (2009).
12. Y. Zhou and Y. Xu, Journal of Mathematical Analysis and Applications 320, 578 (2006).
13. M. Cui and Y. Lin, Nonlinear Numerical Analysis in the Reproducing Kernel Space, Nova Science, New York, NY, USA (2009).
14. A. Berlinet and C. T. Agnan, Reproducing Kernel Hilbert Space
in Probability and Statistics, Kluwer Academic Publishers, Boston,
Mass, USA (2004).
15. A. Daniel, Reproducing Kernel Spaces and Applications, Springer,
Basel, Switzerland (2003).
16. H. L. Weinert, Reproducing Kernel Hilbert Spaces: Applications in
Statistical Signal Processing, Hutchinson Ross (1982).
17. Y. Lin, M. Cui, and L. Yang, Applied Mathematics Letters 19, 808
(2006).
18. L. H. Yang and Y. Lin, Electronic Journal of Differential Equations
2008, 1 (2008).
19. O. Abu Arqub and M. Al-Smadi, Applied Mathematics and Computation 243, 911 (2014).
20. S. Momani, O. Abu Arqub, T. Hayat, and H. Al-Sulami, Applied
Mathematics and Computation 240, 229 (2014).
21. M. Al-Smadi, O. Abu Arqub, and S. Momani, Mathematical Problems in Engineering 2013, 10 (2012), Article ID 832074.
22. O. Abu Arqub, M. Al-Smadi, and S. Momani, Abstract and Applied
Analysis 2012, 16 (2012), Article ID 839836.
23. O. Abu Arqub, M. Al-Smadi, and N. Shawagfeh, Applied Mathematics and Computation 219, 8938 (2013).
24. N. Shawagfeh, O. Abu Arqub, and S. Momani, Journal of Computational Analysis and Applications 16, 750 (2014).
25. M. Al-Smadi, O. Abu Arqub, and A. El-Ajuo, Journal of Applied
Mathematics 2014, 10 (2014), Article ID 135465.
26. O. Abu Arqub, Journal of Computational Analysis and Applications
18, 857 (2015).
27. O. Abu Arqub, M. Al-Smadi, S. Momani, and T. Hayat, Soft Computing (2015), doi:10.1007/s00500-015-1707-4.
28. F. Geng and M. Cui, Applied Mathematics and Computation
192, 389 (2007).
29. C. Li and M. Cui, Applied Mathematics and Computation 143, 393
(2003).
30. W. Jiang and Z. Chen, Applied Mathematics and Computation
219, 10225 (2013).
31. F. Geng and M. Cui, Applied Mathematics Letters 25, 818 (2012).
32. F. Geng and S. P. Qian, Applied Mathematics Letters 26, 998
(2013).
33. O. Abu Arqub, Mathematical Problems in Engineering 2015, 13
(2015), Article ID 518406.
34. O. Abu Arqub, Neural Computing and Applications (2015), DOI:
10.1007/s00521-015-2110-x.
35. O. Abu Arqub, Mathematical Methods in the Applied Sciences, In
press.
36. F. Geng, S. P. Qian, and S. Li, Journal of Computational and Applied
Mathematics 255, 97 (2014).
37. W. Jiang and Z. Chen, Numerical Methods for Partial Differential
Equations 30, 289 (2014).
Received: 14 January 2016. Revised/Accepted: 24 April 2016.
RESEARCH ARTICLE
J. Comput. Theor. Nanosci. 13, 1–9, 2016
View publication stats
9