Flutter Instability of Cable
advertisement

Flutter Instability of Cable-stayed Bridges
Le Thai Hoa
Vietnam National University Hanoi
144 Xuan Thuy - Cau Giay – Hanoi, Vietnam
thle@vnu.edu.vn
Abstract. After total collapse of Tacoma Narrow bridge in USA, 1940 due to the Flutter
instability, the aerodynamic and aeroelastic phenomena has been focused on bridge structures.
Especially, the Flutter instability (known as aeroelastic instability) is the most concerned for
flexible long-span bridges, because of a reason of structural catastrophe. This paper will focus
on the bridge aeroelastics and the analytical methods for Flutter instability solutions. The stateof-the-art analytical methods, including single-mode, two-mode and multi-mode Flutter
stability analyses will be presented with numerical example and some investigations.
1. Introduction
Many large-span bridges have been successfully built around over the world in only
last two decades of the 20th century. Further bridges are hinged on super long span and
more slender structure as the main tendency of research and development of bridge
engineering in the few coming decades. The longer, the more slender structures,
however, also face with many difficulties, especially in the dynamic, seismic and
aerodynamic behaviors. It is widely agreed that the long-span bridges are very prone to
the aerodynamic effects and the wind-induced vibrations. The collapse of Tacoma
Narrow bridge in USA, 1940 always reminded as the aware lesson about the important
role of the aerodynamic effects on long-span bridges. Among the aerodynamic effects,
such phenomena are initiated from the wind-structure interactions that induce the
dynamic instability sub-classified into the aeroelastic phenomena (also known as
aeroelastic instability or aeroelastics). In the branch of bridge aeroelastics, the flutter
instability is usually required the much more concern, especially for long-span, slender
and flexible bridges due to its potential risks for structural catastrophe.
This paper presents the literature reviews on the bridge aerodynamics and
aeroelastics, moreover, the state-of-the-art analytical methods for the aeroelastic
analysis in frequency domain and model space also are focused on. Numerical example
with some further investigations is carried out in a case of cable-stayed bridge.
2. Literature reviews on Flutter instability and analytical methods
Previous works of the aerodynamics and aeroelastics were first applied for the
aeronautical field, since after the accidence of the Tacoma Narrow bridge in 1940, they
had focused on the bridge structures. The bridge aerodynamics can be commonly
classified into two groups: limited-amplitude and divergent-amplitude wind-induced
vibrations (Simiu and Scanlan, 1978). The former comprises the vortex-induced
vibrations, buffeting and wake-induced vibrations which affect to dynamic fatigue and
serviceable discomfort, whereas the later consists of flutter and galloping which can
deduce to structural instability. Response amplitude of the bridge aerodynamics
corresponding to wind velocity ranges is expressed in Fig-1 (Le, 2003). Generating
mechanism of the bridge aerodynamic phenomena much concerns: i) simultaneous
modification of approaching flow and around-body flow by deck’s geometry and
movement, wind characteristics itself and ii) local distribution of pressure fluctuation
at leading edge region of deck surface (Matsumoto, 2003).
The bridge aeroelasticity imply for the flutter instability. It trends to be most
concern on flexible long-span bridges at high wind velocity in which the aeroelastic
interaction between wind and structure generates the so-called self-excited aeroelastic
forces. The aeroelastic instability, however, occurs relating to negative damping
mechanism due to combination between structural damping and aerodynamic one.
Traditionally, two types of the flutter instability have been classified basing on
characteristics of bridge’s modal participation at instability state. Torsional flutter is
case that only torsional mode participate dominantly to such critical state, whereas
coupled flutter occurs when two torsional and heaving modes simultaneously involve
in. For example, the torsional flutter was observed in the failure of Tacoma Narrow
bridge, and coupled flutter experienced in the aeroelastic instability of airplane’s airfoil
wing. Various experiments and numerical analyses (Matsumoto, 1996; Katsuchi, 1999),
moreover, showed that the torsional flutter seems to occur at long-span bridges with
bluff deck sections such as rectangular, H-shape or stiffened truss sections, whereas
streamlined sections are favorable for the coupled flutter. Surprisingly, the AkashiKakyo bridge (the world longest bridge now) exhibited with the coupled flutter that
this has been never experienced before with stiffened truss sections (Katsuchi, 1998).
In the practical view, aeroelastic instability analysis purposes on finding out a
critical wind velocity at which instability condition occurs. Generally, it can be
obtained either from analytical, experimental or simulation approaches (see Fig.-3).
The experimental method is based on the free vibration tests of 2D sectional models in
the wind tunnel. The computational fluid dynamics (CFD) technique that is almost
based on the discrete vortex simulation (DVS), large eddy simulation (LES), or
Reynold average numerical simulation (RANS) has gained much development so far to
become usefully supplemental tool beside the analytical and experimental methods,
however, it still has many limitations to cope with complexity of bridge sections and
nature of 3D bridge structures (Larsen, 1997).
At beginning works of analytical approach, models of the self-excited forces and
solutions of 2DOF system’s aeroelastic instability problem had been focused.
Theodorsen (1935), Kussner(1936) developed potential theory of airfoil aerodynamics
by given circulation functions to build the self-excited forces, however, such
Theodorsen’s model was limited applications for only airfoil, thin-plate sections.
Scanlan(1971) introduced building up the self-excited forces from experimental
approach by invented aerodynamic derivatives, this Scanlan’s model has widely
exploited so far for the aeroelastic instability problem of 2D sectional systems and 3D
full-bridge structures due to its applications to various types of bridge sections.
Response
Amplitude
Vortex-induced
Response
Buffeting Response
Flutter and Galloping
Instabilities
Karman-induced ‘Lock-in’
Response
Response
Forced forces
Self-excited
forces
Random forces
in turbulent wind
Self-excited forces
in smooth or turbulent
winds
Resonant
peak
Reduced velocity U re U
nB
Limited-amplitude response
Low and medium wind velocity range
Divergent-amplitude response
High wind velocity range
Figure 1. Response amplitude vs. wind velocity
The analytical solutions for the 2DOF aeroelastic instability included a complex
eigenvalue method (Simui and Scanlan, 1978) and a step-by-step method (Matsumoto,
1996). Empirical formula, moreover, have introduced by Bleich(1956), Selberg(1963),
Kloppel and Thiele (1967). For analytical methods of the bridge aeroelastic instability
(as nDOF system problems), the state-of-the-art developments have been broadly
based on frequency-domain analyses and generalized transformation in modal space
using the finite element method (FEM). It significantly found that only certain mode or
some coupled modes involved dominantly at critical state of aerelastic instability.
Scanlan (1990); Pleif (1995) introduced single-mode aeroelastic analysis that is
suitable to the torsional flutter analysis in which only one dominant mode participated,
whereas two-mode analytical method developed to treat with the coupled flutter (Jones,
2003). Le (2003) modified such formulations of the single-mode and two-mode
aeroelastic analyses to take more involvement of auto-modal, cross-modal interactions.
Some studies (Katsuchi, 1999), however, suggested that in the coupled flutter of some
investigation cases, not only fundamental torsional and heaving modes were involved
at the critical state, but many modes might superpose to create more-risked critical
state. In the comprehensive approach, when many modes might be taken into
participation in the critical state, multi-mode aeroelastic analysis has been developed to
deal with such cases (Katsuchi, 1999; Ge, 2002). Recently, coupling between selfexcited aeroelastic forces and randomly wind-induced forces (known as buffeting
forces) has been taken into account at medium, high velocity range in the turbulent
wind (Katsuchi, 1999; Jones, 2003), however, participation of the buffeting forces
does not influence on the critical condition of the aeroelastic instability. In another
development, moreover, an analytical framework of the bridge aeroelastic analysis
presented in the time-domain formulations thanks to using indicial function and
rational function approximation (Chen, 2000; Aas-Jakobsen, 2001). This new approach
is promising for the further applications, because its possibility to treat with
geometrical and aerodynamic nonlinearities.
4. Self-excited Flutter forces and aerodynamic derivatives
4.1. Uniformly self-excited forces
Self-excited aeroelastic forces are dependant on deflection components (vertical: h,
lateral: p and rotation: ) and their first-, second-order derivatives. Because air density
is much smaller than that of structural materials, thus aeroelastic inertia forces almost
have been omitted. Accordingly, the self-excited aeroelastic lift, drag and moment in
unit length of bridge deck can be expressed (Scanlan, 1971):
1
h
B
h
Lse U 2 B ( KH1* KH 2*
K 2 H 3* K 2 H 4* ) (1a)
2
U
U
B
Lse Mse
1
p
B
p
U
Dse U 2 B( KP1* KP2*
K 2 P3* K 2 P4* ) (1b)
h
D
se
2
U
U
B
p
1
h
B
h
M se U 2 B 2 ( KA1* KA2*
K 2 A3* K 2 A4* ) (1c
B
2
U
U
B
)
where B: deck width; , U : air density and mean wind velocity;
H i* ( K ), Pi * ( K ), Ai* ( K ) (i=14): aerodynamic derivatives associated with self-excited
lift, drag and moment, respectively; K: reduced frequency K B / U .
4.2. Nodal-lumped self-excited forces
Uniformly self-excited forces are linearly lumped at bridge deck nodes (see Fig.-2):
{Pse (t )} [ P1 ]{U } [ P2 ]{U }
(2)
where
[ P1 ], [ P2 ]
:
damping
and
elastic
aeroelastic
force
matrices,
respectively; {U }, {U } : deflection vector and its first-order derivative vector which can
be
expressed
as
nodal
six
components
in
element
coordinates:
{U } {0 h p 0 0} and {U } {0 h p 0 0}T
T
(3)
1/2.M.L
1/2.M.L
Figure 2. Nodal linear-lumped self-excited forces
From Eqs.(1a), (1b), (1c) and linearly-lumped forces (2), nodal deflection
components (3), the nodal damping and elastic aeroelastic force matrices [P1], [P2] can
be obtained:
0 0 0
0
0 0
0 0 0
0 0 0
0 H* 0 BH* 0 0
H * 0 0 BH* 0 0
1
2
3
4
*
*
*
*
0
0
P
BP
0
0
0
0
P
BP
0 0 (4)
1 2 K
1
1
2
4
3
;
2
2
[P1] U B L
[P2 ] U K L *
2 *
4
4
U 0 BA1* 0 B2A2* 0 0
BA4 0 0 B A3 0 0
0 0 0
0 0 0
0 0 0
0
0 0
0 0 0
0
0 0
0 0 0
0 0 0
4.3. Aerodynamic derivatives
As usual, the aerodynamic derivatives are commonly obtained by experimentalbased measurements, concretely, as forced vibration tests from i) indirect
measurements of unsteady surface pressure and phase difference (Scanlan, 1971), or ii)
direct measurements of aeroelastic forces on sectional model (Matsumoto, 1997).
Furthermore, some approaches for determination of the aerodynamic derivatives are
mentioned as free vibration tests using system identification technique (Iwamoto,
1995), CFD simulation (Larsen, 1999), or quasi-steady formulations (Scanlan, 1989;
Pleif, 1995).
Figure 3.Aerodynamicderivatives of fundamental rectangularsections(Matsumoto1996)
From Eqs.(1ac), only few velocity-related derivatives H1* , P1* , A2* play very
important role in the aeroelastic instability due to their contributions on the system’s
damping mechanism. Interrelation among the aerodynamic derivatives, furthermore,
has been found from means of experimental measurements (Matsumoto, 1996), but
still has not yet proved consistently from theoretical aspect.
H 3* 2 H1* / K ; H 2* 2 H 4* / K ; A3* 2 A1* / K ; A2* 2 A4* / K
(5)
5. Analytical methods for Flutter instability
5.1. General formulations
The motion equation of bridge structure (N degree-of-freedom system) solely
subjected to the self-excited aeroelastic forces can be expressed in means of FEM as:
[ M ]{U} [C ]{U } [ K ]{U } {Pse (t )}
(6)
where [ M ], [C ], [ K ] : structure’s mass, damping, stiffness matrices, respectively;
{Pse (t )} : self-excited force vector; {U }, {U }, {U} : deflection vector and its first-,
second-order derivatives, respectively.
The self-excited
force
vector
can be
explicitly
expanded
as
follow: {Pse (t )} [ P1 ]{U } [ P2 ]{U } Thus, the motion equation (6) is rewritten as
follows:
[ M ]{U} [C * ]{U } [ K * ]{U } 0
(7)
where [C ] [C ] [ P1 ] , [ K ] [ K ] [ P2 ] : aeroelastic system’s damping and
stiffness force matrices.
The motion equation is transformed into the generalized coordinates:
{U } [ ]{ }
(8)
where { } : deflection vector in the generalized coordinates; [ ] : mass-normalized
eigenvector matrix.
Using the mass-matrix-based normalization technique, we transform eq.(7) into the
standard form:
*
*
*
*
[ I ]{} [C ]{} [ K ]{ } 0
*
(9)
*
where [C ] [ ]T [C * ][ ] , [ K ] [ ]T [ K * ][ ] : aeroelastic system’s generalized
damping force and generalized stiffness matrices, respectively; [ I ] [ ]T [ M ][ ] :
unit-normalized matrix. Then,
finding a solution of eq.(9) under such the form:
t
{ } []e
(10)
Expanding Eq.(9) using Eq.(10), the quadratic eigenvalue problem can be obtained:
*
*
Det (2 [ I ] [C ] [ K ]) 0
(11)
where : eigenvalues solved from 2N-order polynomial equation of eq.(11). Because
*
*
the matrices [C ], [ K ] are no longer symmetrical as the structure’s original
matrices [C ], [ K ] , thus the eigenvalues, eigenvectors are exhibited by the N pairs of
complex conjugates as follows:
(12)
{i } { i } j{i } ; {i } { pi } j{qi } ; i 1 N
Generalized response amplitude can be expressed by superposing of modal
responses in the generalized coordinates: { }
N
{ }e
it
i 1
i
(13)
where N : number of combined modes to global response ( N N ).
Thus, global response amplitude of bridge in the generalized coordinates can be
rewritten hereby:
N
{ } e i t [({ pi } {qi }) sin i t ({qi } { pi }) cos i t ]
i 1
Global response of bridge structure in the original coordinates follows:
(14)
N
{U } e it {i }[ ({ pi } {qi }) sin i t ({qi } { pi }) cos i t ]
(15)
i 1
From Eq.(15), if a negative real part of complex eigenvalue ( i ) of any mode exists,
then system is induced to the aeroelastic instability due to divergent response
amplitude. It is also known as content of the Liapunov’s Theorem in the motion
instability. Thus, the critical condition of aeroelastic instability is traced at which real
part of complex eigenvalue of any mode become zero.
5.2. Multi-mode Flutter stability analysis in state-space
Solution for the quadratic eigenvalue problem given by Eq.(11) is complicated. For
practical applications, Eq.(9) can be transformed into the state space to be the standard
eigenvalue problem:
I 0 0
(16)
*
C * 0 K 0
Finding solution under form: { } [ ]e t
I 0
0 I
t
* ,
A
e t ,
* , B
e
0
K
I C
We have:
A{ [ ] [ ]}T B { [ ] [ ]}T
0
I
I
B Z A Z ;
in which Z { [ ] [ ]}T
Expanding from eq.(17), we have:
(17)
C * K *
D Z Z in which D
I
0
(18)
A1 B Z Z
The standard eigenvalue problem in Eq.(18) can be solved by some computational
techniques such as Jacobi diagonalization, QL or QR transformation, subspace
iteration and others. Above-mentioned approach in the state space is known as the
multi-mode aeroelastic analysis in which many modes can be combined (Ge, 2002).
Because the bridge aeroelastic instability occurs favorably at certain torsional mode or
certain coupled torsional-heaving modes, some simpler approaches can be applied for
tracing the critical condition. Thus, the single-mode and two-mode aeroelastic analyses
have been developed.
5.3. Single-mode Flutter stability analysis
The general motion equation can be expressed in the modal space in different way:
[ I ]{} [C ]{} [ K ]{ } [ ]T [ P1 ][ ]{} [ ]T [ P2 ][ ]{ }
(19)
where [ I ] [ ] [ M ][ ] ; [C ] [ ] [C ][ ] ; [ K ] [ ] [ K ][ ] ; [I], [C ] , [K ] :
mass-normalized unit, damping and stiffness matrices, respectively.
Single degree-of-freedom motion equation of ith mode in the generalized coordinates:
i 2 i i i i2 i pi (t )
(20)
th
where
pi(t):i -mode
generalized
self-excited
force:
T
T
T
T
T
pi (t ) i P1 i {i } i P2 i {i }
(21)
Expanding Eq.(21) with aeroelastic force matrices [P1],[P2] given in Eq.(4), pi(t) can
be obtained:
1
BK *
pi (t ) U 2
[ H1 Ghi hi BH 2*Ghi i P1*G pi pi BP2*G pi hi BA1*G i hi B 2 A2*G i i ]i
2
U
1
(22)
U 2 K 2 [ H 4*Ghihi BH 3* Ghii P4*G pi pi BP3*G pii BA4*Gi hi B 2 A3*Gii ] i
2
where G rm sn (r , s h, p, ; m, n i, j ) : modal summations;
N
Grm sn lk (r ,k ) m (s ,k ) n
(23)
k 1
Omitting cross-modal summations G rm sn (rs), only auto-modal ones Grm sn (r=s)
remain
1
BK *
1
pi (t) U 2
[H1 Ghihi P1*Gpi pi B2 A2*Gii ]i U 2 K 2[H4*Ghihi P4*Gpi pi B2 A3*Gii ]i (24)
2
U
2
th
From Eq.(20) and Eq.(24), i -mode aeroelastic motion equation can be obtained:
1
1
i [2 ii U 2 (H1*Ghihi P1*Gpi pi B2 A2*Gii )]i [i2 U 2K 2[H4*Ghihi P4*Gpi pi B2 A3*Gii )]i 0
2
2
(25)
i 2 i ii i i 0
2
B i
2
where i i2 /[1 B ( H 4* ( K i )Gh h P4* ( K i ) B 2 A3* ( K i )G )] ; K i
i i
i i
U
2
i
i i B 2 *
[ H1 ( K i )Ghi hi P1* ( K i )G pi pi B 2 A2* ( K i )Gii ]
4
i
(26a)
(26b)
Eq.(25) is solved iteratively with incremental value of wind velocity, in which the
aerodynamic derivatives are determined from the aeroelastic frequency ( i ). The
critical condition of the aerelastic instability is traced out when aeroelastic system’s
damping ratio becomes zero ( i 0) .
5.5. Two-mode Flutter stability analysis
Similar to Eq.(20), Eq.(22), dual motion equations of ith and jth modes with coupled
self-excited aerelastic forces can be expressed:
{}i , j 2 i , ji , j {}i , j 2 i , j { }i , j
1
BK *
U 2
[H1 Ghi , j hi , j BH2*Ghi , ji , j P1*G pi , j pi , j BP2*G pi , j hi , j BA1*Gi , j hi , j B 2 A2*Gi , ji , j ]{}i, j
2
U
1
U 2 K 2[ H 4*Ghi , jhi , j BH3*Ghi , ji , j P4*Gpi , j pi , j BP3*Gpi , ji , j BA4*Gi , jhi , j B2 A3*Gi , ji , j ]{ }i , j (27)
2
Solution for dual motion equations (27) can be carried out by similar procedure for
solution of 2DOD system that was presented in Scanlan, 1978; Le, 2003. As a result,
solution of Eq.(27) has been expanded to solve two equations (containing only such
parameters as velocity, frequency, aerodynamic derivatives, modal integral sums).
Solutions of Eq.(28a), Eq.(28b) are found simultaneously, then solution curves plotted
and intersections of these curves determine the critical condition:
(28a)
Aii A jj Bii B jj A ji Aij B ji Bij 0
Aii B jj Bii A jj A ji Bij B ji Aij 0
(28b)
where
Aii (i / F )2 1 1/ 2( B2 )[H 4*Ghi hi BH3*Ghi i P4*Gpi pi BP3*Gpi i BA4*Gi hi B2 A3*G i i ] ;
Aij 1 / 2( B 2 )[ H 4*Ghi h j BH 3*Ghi j P4*G pi p j BP3*G pi j BA4*G i h j B 2 A3*G i j ] ;
Bii 2 i (i / F ) 1 / 2(B2 )[H1*Ghihi BH2*Ghii P1*Gpi pi BP2*Gpihi BA1*Gihi B2 A2*Gii ] ;
Bij 1 / 2( B 2 )[ H1*Ghi h j BH 2*Ghi j P1*G p i p j BP2*G pi h j BA1*G i h j B 2 A2*G i j ] ;
A jj , A ji , B jj , B ji are deduced in the same manner
(29)
6. Numerical example and discussions
A concrete cable-stayed bridge was taken for demonstration and investigations.
Spans were arranged by 40.4+97+40.5=178m. Three dimensional full-bridge model
was built using the Finite Element Method’s frame and truss elements. Material
properties were: i) girder and tower: E =3600000T/m2, G =1384600T/m2, =0.3; ii)
cable stays: E = 19500000T/m2. Sectional geometrical parameters were: i) girder A
=6.525 m2, I33 =0.11 m4, I22 =114.32 m4, J=0.44m4; ii) tower A =1.14 m2, I33=0.257 m4,
I22 =0.118 m4;J=0.223m4 and A =1.14 m2, I33=0.257 m4, I22 =0.118 m4;J =0.223m4; iii)
cable stays: A =26.355 cm2 (group 1), A =16.69 cm2 (group 2). First ten modes of free
vibration were analyzed, modal characteristics and mode shapes are given in Tab.-1
and Fig.-4.
Tab.-1. Modal characteristics of first 10 modes
Mode
Eigenvalue
Frequency
Period
index
2
Note
(Hz)
(s)
1
1.47E+01
0.609913
1.639579
S-V-1
2
2.54E+01
0.801663
1.247406
A-V-2
3
2.87E+01
0.852593
1.172893
S-T-1
4
5.64E+01
1.194920
0.836876
A-T-2
5
6.60E+01
1.293130
0.773318
S-V-3
6
8.30E+01
1.449593
0.689849
A-V-4
7
9.88E+01
1.581915
0.632145
S-T-P-3
8
1.05E+02
1.630459
0.613324
S-V-5
9
1.12E+02
1.683362
0.594049
A-V-6
10
1.36E+02
1.857597
0.538300
S-V-7
S: Symmetric mode V: Heaving mode
A: Asymmetric mode T: Torsional mode P: Horizontal mode
Mode 1
Mode 2
Mode 3
Mode 4
Mode 5
Mode 6
Figure 4. Some fundamental 3D modes
3.5
20
H*1
15
A*1
3
A*2
H*2
2.5
H*3
5
Reduced velocity Ure=U/fB
0
1
2
3
4
5
6
7
8
9
10
-5
11
12
13
A*i (i=1,2,3)
H*i (i=1,2,3)
10
A*3
2
1.5
1
-10
0.5
-15
0
Reduced velocity Ure=U/fB
1
2
3
4
5
6
7
8
9
10
11
12
13
-0.5
-20
Figure 5. Aerodynamic derivatives H i* , Ai* (i=1,2,3)
Main aerodynamic derivatives of bridge section (omitting H 4* , A4* , Pi * ) were
determined using the quasi-steady formulations given by Scanlan(1989); Pleif(1995),
shown in Fig.-5. Structural damping values were assumed to be 0.5% for all modes.
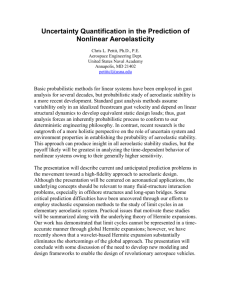
Fig-6 and Fig-7 express the aeroelastic damping values and the aeroelastic frequencies
depending on the wind velocities, associated with first five modes.
Damping-velocity diagram
1.2
1
Aeroelastic damping ratio
0.8
Mode 1
0.6
Mode 2
0.4
Mode 5
0.2
Mode 4
0
-0.2
10
critical condition
U=64.5m/s
20
30
critical condition
U=88.5m/s
Mode 3
40
50
60
Wind velocity (m/s)
70
80
90
Figure 6. Aeroelastic damping of some fundamental modes vs. wind velocities
As can be seen from Fig.-6 that with an increase of wind velocity, aeroelastic
damping of the torsional modes (modes 3&4) reduces to respectively intersect axis at
certain velocities of 64.5m/s and 88.5m/s of which determine the critical conditions of
aeroelastic instabilities, whereas that of the heaving modes (modes 1,2&5) grows up.
Frequency-velocity diagram
1.5
1.4
Aeroelasic frequency (Hz)
1.3
1.2
Mode 5
Aeroelastic interaction
Mode 4
1.1
1
0.9
0.8
Aeroelastic interaction
Mode 3
Mode 2
0.7
Mode 1
0.6
0.5
10
20
30
40
50
60
70
80
90
Wind velocity (m/s)
Figure 7. Aeroelastic frequency of some fundamental modes vs. wind velocities
These mean that aeroelastic damping forces supplement energy to the torsional modes,
but suppress energy of the heaving modes. Aeroelastic instability in this example,
furthermore, is identified as the torsional flutter. Aeroelastic frequencies of torsional
modes reduce at certain velocities, whereas those of heaving modes almost stay a
constant (see Fig.-7). This can be explained that aeroelastic stiffness forces are
favorable to interact with torsional-mode-based forces, not heaving-mode-based ones.
0.1
0.015
0.01
0.05
0
Mode1 at
Mode1 at
Mode1 at
Mode1 at
Mode2 at
Mode2 at
Mode2 at
Mode2 at
-0.05
-0.1
Modal response
Modal response
0.005
0m/s
50m/s
70m/s
90m/s
0m/s
50m/s
70m/s
90m/s
0
-0.005
Mode3 - initial
Mode3 at 50m/s
Mode3 at 70m/s
Mode3 at 90m/s
Mode4 - initial
Mode4 at 50m/s
Mode4 at 70m/s
Mode4 at 90m/s
-0.01
-0.015
Modes 1&2 - Decay
-0.02
Modes 3&4 Divergence
-0.15
1 2
3 4
5 6
7 8
9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30
Deck nodes
-0.025
1 2
3 4
5 6
7 8
9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30
Deck nodes
Figure 8. Modal responses of heaving modes (left) and torsional modes (right)
Modal responses of heaving modes (1&2) and torsional modes (3&4) at different
velocities (U=0;50;70;90m/s) and time interval of 2 seconds are investigated, shown in
Fig.-8. Modal responses of the heaving modes seem to quickly decay no respect to
increase of velocity, whereas those of the torsional modes diverge at certain wind
velocities. Mode 3 starts divergently from investigated velocity of 70m/s, and mode 4
from 90m/s.
7. Conclusion
The theory and example presented in this study highlight the bridge aeroelastic
instability and its applicable analytical methods. Iterative procedure with velocity
increment is a must in the aeroelastic analysis in the frequency domain. The example
shows that torsional-mode-based instability (or torsional-branch instability) plays very
important role that is associated with modal characteristics and aerodynamic
derivatives, relating to torsional modes and aeroelastic damping forces. The analytical
method for the Flutter instability analysis in the time domain will be presented in next
paper with using Rational Function Approximation technique.
References
1. Agar, T.J.A., (1991). Dynamic instability of suspension bridges. Computers and
Structures, 41, 1321-1328.
2. Bisplinghoff, R.L. (1996). Principles of aeroelasticity. John-Wiley and sons.
3. Chen, X., Matsumoto, M., Kareem, A., (2000). Time-domain flutter and buffeting
response analysis of bridges. Journal of Engineering Mechanics,ASCE, 126,1,7-16.
4. Davenport, A.G., (1962). Buffeting of a suspension bridge by storm winds.
Journal of Structural Division, ASCE.
5. Ge, Y.J., Tanaka, H., (2000). Aerodynamics flutter analysis of cable-supported
bridges by multi-mode and full-mode approaches. Journal of Wind Engineering
and Industrial Aerodynamics, 86, 123-153.
6. Iwamoto, M., Fujino, Y., (1995). Identification of flutter derivatives of bridge deck
from free vibration data. Journal of Wind Engineering and Industrial
Aerodynamics, 54-55, 55-63
7. Jones, N.P., Raggett, J.D., Ozkan, E., (2003). Prediction of cable-supported bridge
response to wind: coupled flutter assessment during retrofit. Journal of Wind
Engineering and Industrial Aerodynamics, 91, 12-15, 1445-1464
8. Katsuchi, H., Jones, N.P., Scanlan, R.H., Akiyama, H., (1998). Multi-mode flutter
and buffeting analysis of the Akashi-Kaikyo bridge. Journal of Wind Engineering
and Industrial Aerodynamics, 77-78, 431-441.
9. Matsumoto, M., (1996). Aerodynamic damping of prisms. Journal of Wind
Engineering and Industrial Aerodynamics, 59, 159-175.
10. Matsumoto, M., Shirato, H., Yagi, T., Shijo, R., Eguchi, A., Tamaki, H., (2003).
Effects of aerodynamic interferences between heaving and torsional vibration of
bridge decks: the case of Tacoma Narrows Bridge. Journal of Wind Engineering
and Industrial Aerodynamics, 91, 1547-1557
11. Larsen, A., Walther, J.H., (1997). Aeroelastic analysis of bridge girder sections
based on discrete vortex simulation. Journal of Wind Engineering and Industrial
Aerodynamics, 67-68, 253-265
12. Le., T.H., (2003). Flutter aerodynamic stability analysis and some aerodynamic
control approaches of cable-stayed bridges. Master Thesis at Vietnam National
University Hanoi.
13. Pleif, M.S., Batista, R.C., (1995). Aerodynamic stability analysis of cable-stayed
bridges. Journal of Structural Engineering, l. 121, No. 12.
14. Simiu, E., Scanlan, R.H., (1978). Wind effects on structures. 1st edition, JohnWiley and Sons.
15. Scanlan, R.H., Tomko, J.J., (1971). Airfoil and bridge deck flutter derivatives.
Journal of EngineeringMechanics Division, ASCE. 97, 6.
16. Scanlan, R.H., Jones, N.P., (1990). Aeroelastic analysis of cable-stayed bridges.
Journal of EngineeringMechanics, ASCE, 113, 4.
17. Theodorsen, T, Garrick, I.E., (1940). Mechanism of flutter: a theoretical and
experimental investigation of the flutter problem. Report NACA TR 685.