Mechanical Engineering - 22.302 ME Lab I
ME 22.302
Mechanical Lab I
Numerical Methods
1 Volt Sine
Series1
1.5
1
97
93
89
101
85
81
77
73
69
65
61
57
53
49
45
41
37
33
29
25
9
21
5
17
1
0
13
SIN(X)
0.5
-0.5
Normalized Squared Function
-1
-1.5
0.07
0.06
2*PI
0.05
0.04
0.03
0.02
0.01
Dr. Peter Avitabile
University of Massachusetts Lowell
Numerical Methods - 010504 - 1
96
91
86
81
76
71
66
61
56
51
46
41
36
31
26
21
16
11
6
1
0
Copyright © 2001
Mechanical Engineering - 22.302 ME Lab I
Some brief notes on numerical methods are included in this section
Root Mean Square (RMS)
Differentiation of a Signal
Integration of a Signal
Least Squares Fit of Data
Dr. Peter Avitabile
University of Massachusetts Lowell
Numerical Methods - 010504 - 2
Copyright © 2001
Mechanical Engineering - 22.302 ME Lab I
Root Mean Square (RMS) of a Sine Wave
1 T 2
RMS =
y ( t ) dt
∫
0
T
Peak to Peak
Peak
T = Period
Dr. Peter Avitabile
University of Massachusetts Lowell
Numerical Methods - 010504 - 3
Copyright © 2001
Mechanical Engineering - 22.302 ME Lab I
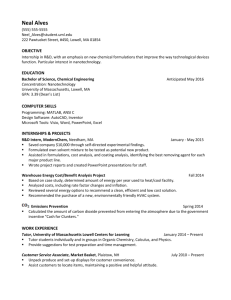
A sine wave can be written as a continuous function. This sine
wave can be written in discrete form for small delta x increments
To evaluate the RMS, the sine wave needs to be first squared and
then multiplied by each of the delta increments. These values are
summed, divided by the total time and then a square root taken.
1 Volt Sine
Series1
1.5
1
Normalized Squared Function
0.07
0.06
97
101
93
89
85
81
77
73
69
65
61
57
53
49
45
41
37
33
29
25
21
17
9
13
5
0
1
SIN(X)
0.5
0.05
-0.5
0.04
-1
0.03
0.02
-1.5
2*PI
0.01
Dr. Peter Avitabile
University of Massachusetts Lowell
Numerical Methods - 010504 - 4
96
91
86
81
76
71
66
61
56
51
46
41
36
31
26
21
16
6
11
1
0
Copyright © 2001
Mechanical Engineering - 22.302 ME Lab I
In Excel, the data values are created and used to form a sine.
These values are squared and divided by the spacing (increment).
A summation of the values are divided by the entire time length.
The square root of this yields the RMS value of the signal
3
1
2
Dr. Peter Avitabile
University of Massachusetts Lowell
Numerical Methods - 010504 - 5
Copyright © 2001
Mechanical Engineering - 22.302 ME Lab I
Numerical Differentiation needs to be performed in many cases
SLOPE =
dy ∆y yi +1 − yi
=
=
dx ∆x x i +1 − x i
There are many
different methods
available for
numerical processing
Dr. Peter Avitabile
University of Massachusetts Lowell
Numerical Methods - 010504 - 6
Copyright © 2001
Mechanical Engineering - 22.302 ME Lab I
1st Forward Differentiation
dy ∆y yi +1 − yi
SLOPE =
=
=
dx ∆x x i +1 − x i
yi+1
yi
x i x i+1
1st Backward Differentiation
yi
dy ∆y yi − yi−1
SLOPE =
=
=
dx ∆x x i − x i −1
yi−1
x i−1 x i
1st Central Difference
SLOPE =
Dr. Peter Avitabile
dy ∆y yi+1 − yi −1
=
=
dx ∆x x i+1 − x i−1
University of Massachusetts Lowell
Numerical Methods - 010504 - 7
Copyright © 2001
Mechanical Engineering - 22.302 ME Lab I
2nd Central Difference Differentiation – Equal Spacing
d 2 y ∆2 y yi+1 − 2 yi + yi−1
= 2=
2
dx
∆x
∆x 2
Initial conditions need to be specified for the start of the
numerical process. This may have an effect on the accuracy
of the results obtained.
Dr. Peter Avitabile
University of Massachusetts Lowell
Numerical Methods - 010504 - 8
Copyright © 2001
Mechanical Engineering - 22.302 ME Lab I
Numerical Integration - Rectangular Rule
Ii = Ii−1 + yi (x i+1 − x i )
The smaller the x increment, the closer the result
approaches the “actual” theoretical value
Dr. Peter Avitabile
University of Massachusetts Lowell
Numerical Methods - 010504 - 9
Copyright © 2001
Mechanical Engineering - 22.302 ME Lab I
Numerical Integration - Trapezoidal Rule
Ii = Ii−1 +
yi +1 + yi
(x i+1 − x i )
2
The trapezoidal approach is more accurate than the
rectangular approach and is the preferred method
Dr. Peter Avitabile
University of Massachusetts Lowell
Numerical Methods - 010504 - 10
Copyright © 2001
Mechanical Engineering - 22.302 ME Lab I
Least Squares Fit of Data - Regression Analysis
Y
X
Many times it is necessary to fit the best line to a set of
collected data. This is typically performed using a least
squares error minimization of this data to approximate the
parameters that best describe the line. A straight line is
shown next - this can be extended to any order polynomial.
Dr. Peter Avitabile
University of Massachusetts Lowell
Numerical Methods - 010504 - 11
Copyright © 2001
Mechanical Engineering - 22.302 ME Lab I
Least Squares Fit - Straight Line --- y=ax+b
An error term is generated that describes the data in relation
to the line describing the data.
ei = yi − (ax i + b )
The sum of the errors will, in the limit, approach zero.
Therefore, the sum of the square of the error is typically used
z = e12 + e 2 2 + e32 + L
n
z = ∑ [yi − (ax i + b )]2
i =1
Dr. Peter Avitabile
University of Massachusetts Lowell
Numerical Methods - 010504 - 12
Copyright © 2001
Mechanical Engineering - 22.302 ME Lab I
Least Squares Fit - Straight Line --- y=ax+b
To minimize the error, take the derivative of z WRT a and b
n
∂z
= −2∑ x i [yi − (ax i + b )] = 0
∂a
i =1
n
∂z
= −2∑ [yi − (ax i + b )] = 0
∂b
i =1
This can be recast as
n
n
i =1
i =1
n
a ∑ x i + bn = ∑ yi
n
n
a ∑ x i + b∑ x i = ∑ x i yi
2
i =1
Dr. Peter Avitabile
University of Massachusetts Lowell
i =1
i =1
Numerical Methods - 010504 - 13
Copyright © 2001
Mechanical Engineering - 22.302 ME Lab I
Least Squares Fit - Straight Line --- y=ax+b
The Sum of the Squares Error (SSE) is an indicator of the
goodness of the fit. Smaller SSE indicates a better fit
n
SSE = ∑ [yi − f (x i )]2
i =1
Another indicator is the R-Squared Value. Values approaching
1.0 indicate a good fit
SSE
r = 1−
SST
2
n
SST = ∑ [yi − y]2
i =1
Dr. Peter Avitabile
University of Massachusetts Lowell
Numerical Methods - 010504 - 14
Copyright © 2001
Mechanical Engineering - 22.302 ME Lab I
Least Squares Fit - Straight Line using Alternate Coordinates
The data may not always be best described by a linear fit in
recatngular coordinates. A higher order model may be needed.
However, many times a change in the coordinate system may
result in a form that is best described by a straight line.
Equation Type
Exponential
Logarithmic
Power
Dr. Peter Avitabile
Equation
Coordinate System
y = ae bx
Log Y vs X
y = a ln x + b
y = ax b
University of Massachusetts Lowell
Y vs Log X
Log Y vs Log X
Numerical Methods - 010504 - 15
Copyright © 2001
Mechanical Engineering - 22.302 ME Lab I
Least Squares Fit - Matrix Formulation
The same least squares minimization problem can be formulated
with a matrix approach using MATLAB.
The basic equations can be cast as
y1 = ax1 + b
y 2 = ax 2 + b
{y} = [{x}
y3 = ax 3 + b
M
Dr. Peter Avitabile
to find the
coefficients
a and b
University of Massachusetts Lowell
[
a
a
{1}] = [coef ]
b
b
]
−1
a
T
T
[
]
[
]
[
]
=
coef
coef
coef
{y}
b
Numerical Methods - 010504 - 16
Copyright © 2001
 0
0