dc microgrids control
advertisement

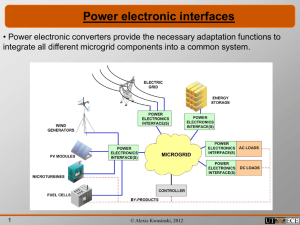
Stability and Control of dc Micro-grids Alexis Kwasinski Thank you to Mr. Chimaobi N. Onwuchekwa (who has been working on boundary controllers) May, 2011 1 © Alexis Kwasinski, 2011 Overview •Introduction •Constant-power-load (CPL) characteristics and effects •Dynamical characteristics of DC micro-grids •Conclusions/future work 2 © Alexis Kwasinski, 2011 Micro-grids • What is a micro (or nano) grid? • Micro-grids are independently controlled (small) electric networks, powered by local units (distributed generation). 3 © Alexis Kwasinski, 2011 Introduction • ac vs. dc micro-grids • Some of the issues with Edison’s dc system: • Voltage-transformation complexities • Incompatibility with induction (AC) motors • Power electronics help to overcome difficulties • Also introduces other benefits – DC micro-grids • DC micro-grids • Help eliminate long AC transmission and distribution paths • Most modern loads are DC – modernized conventional loads too! • No need for frequency and phase control – stability issues? 4 © Alexis Kwasinski, 2011 Introduction • ac vs. dc micro-grids •DC is better suited for energy storage, renewable and alternative power sources 5 © Alexis Kwasinski, 2011 Constant-power loads • Characteristics •DC micro-grids comprise cascade distributed power architectures – converters act as interfaces •Point-of-load converters present constant-power-load (CPL) characteristics 0 i (t ) PL v(t ) if v(t ) Vlim if v(t ) Vlim dvB PL z 2 diB iB •CPLs introduce a destabilizing effect 6 © Alexis Kwasinski, 2011 Constant-power loads • Characteristics Simplified cascade distributed power architecture with a buck LRC. diL L dt q (t )( E RS iL ) (1 q (t ))(VD iL RD ) iL RL vC dv P v C C iL L C vC Ro dt with iL 0, vC • Constraints on state variables makes it extremely difficult to find a closed form solution, but they are essential to yield the limit cycle behavior. 7 © Alexis Kwasinski, 2011 Constant-power loads • Characteristics • The steady state fast average model yields some insights: d 2 x2 LPL dx2 LC 2 2 x2 DE dt x2 dt dx P with x2 and x1 C 2 L 0 dt x2 • Lack of resistive coefficient in first-order term • Unwanted dynamics introduced by the second-order term can not be damped. • Necessary condition for limit cycle behavior: d (t ) E vC 1 PL iL PL 2 L • Note: x1 = iL and x2 = vC 8 © Alexis Kwasinski, 2011 C vC vC Constant-power loads • Characteristics • Large oscillations may be observed not only when operating converters in open loop but also when they are regulated with most conventional controllers, such as PI controllers. Simulation results for an ideal buck converter with a PI controller both for a 100 W CPL (continuous trace) and a 2.25 Ω resistor (dashed trace); E = 24 V, L = 0.2 mH, PL = 100 W, C = 470 μF. 9 © Alexis Kwasinski, 2011 Controls • Characteristics E1 400V , E 2 450V , PL1 5 kW , PL 2 10 kW , LLINE 5 H , RLINE 10m, CDCPL 1mF LRC parameters: L 0.5mH , C 1mF , D1 0.5, D2 0.54, RL 0.8 • Large oscillations and/or voltage collapse are observed due to constant-power loads in micro-grids without proper controls 10 © Alexis Kwasinski, 2011 Stabilization • Passive methods – added resistive loads • Linearized equation: Ri P 1 Ri L2 L R C CV o o L 2 1 PL 1 0 2 R C LC CV o o • Conditions: C 1 1 1 PL Vo2 Ri , PL Vo2 Ro L Ri Ro where Ri RS D RD (1 D ) RL • Issue: Inefficient solution 1Ω resistor Ro in parallel to CDCPL E 12.5V , L 480 H , C 480 F , Ro 2, D 0.9, PL 43.8W 11 © Alexis Kwasinski, 2011 Stabilization • Passive methods – added capacitance • Condition: C PL2 L Vo Ri • Issues: Bulky, expensive and may reduce reliability. But may improve fault detection and clearance E 12.5V , L 480 H , C 480 F 200mF , D 0.9, PL 35W 12 60 mF added in parallel to CDCPL © Alexis Kwasinski, 2011 Stabilization • Passive methods – added bulk energy storage • It can be considered an extension of the previous approach. • Energy storage needs to be directly connected to the main bus without intermediate power conversion interfaces. • Issues: Expensive, it usually requires a power electronic interface, batteries and ultracapacitors may have cell voltage equalization problems, and reliability, operation and safety may be compromised. 13 © Alexis Kwasinski, 2011 Stabilization • Passive methods – load shedding • It is also based on the condition that: C PL2 L Vo Ri • Issues: Not practical for critical loads Load reduced from 49 W to 35 W 14 Load dropped from 10 to 2.5 kW at 0.25 seconds © Alexis Kwasinski, 2011 Stabilization • Linear controllers – Passivity based analysis • Initial notions A system x f ( x, u ), : y h( x, u ), x(0) x0 R n , f : R n R m R n h : Rn Rm R p with f is locally Lipschitz and f(0,0) = h(0,0) = 0 is passive if there exists a continuously differentiable positive definite function H(x) (called the storage function) such that dH H ( x) f ( x, u ) u T y dx 15 ( x, u ) R n R m © Alexis Kwasinski, 2011 Stabilization • Linear controllers – Passivity based analysis • Initial notions • Σ is output strictly passive if: dH 2 H ( x ) f ( x, u ) u T y o y ( x, u ) R n R m , and o 0 dx • A state-space system x f ( x), x R n is zero-state observable from the output y=h(x), if for all initial conditions x(0) R n we have y (t ) 0 x (t ) 0 • Consider the system Σ. The origin of f(x,0) is asymptotically stable (A.S.) if the system is - strictly passive, or - output strictly passive and zero-state observable. - If H(x) is radially unbounded the origin of f(x,0) is globally asymptotically stable (A.S.) - In some problems H(x) can be associated with the Lyapunov function. 16 © Alexis Kwasinski, 2011 Stabilization • Linear controllers – Passivity based analysis • Consider a buck converter with ideal components and in continuous conduction mode. In an average sense and steady state it can be represented by Mx [ J R ( x)] x dE where L 0 M 0 C 0 1 J 1 0 0 R ( x) 0 0 PL x22 E E 0 x1 x x2 PL I L DE Equilibrium point: xe V DE o Mx [ J R ( x)] x dE x x xe (Coordinate change) Mx [ J R ( x )] x dE [ J R ( x )] xe 17 © Alexis Kwasinski, 2011 (1) Stabilization • Linear controllers – Passivity based analysis •Define the positive definite damping injection matrix Ri as Ri1 Ri 0 1 PL 2 Ri 2 x2 0 Ri1 Then, R t R R i 0 From (1), add R i ( x ) x on both sides: Mx [ J R ] x dE [J R ( x )] x R ( x ) x PL 1 Ri is positive definite if . Ri 2 x22 t e : 18 0 1 Ri 2 i 0 (Equivalent free E evolving system) Mx [J R t ] x 0 © Alexis Kwasinski, 2011 Stabilization • Linear controllers – Passivity based analysis • Consider the storage function ( x) 1 x T Mx H 2 Its time derivative is: H ( x ) x T Mx x T [ J R t ] x x T R t x 0 if y x ( x ) = y T R y y 2 , H t o 1 where o max Ri1 , R i2 is a free-evolving output strictly passive and zero-state observable • system. Therefore, x 0 is an asymptotically stable equilibrium point of the closed-loop system. 19 © Alexis Kwasinski, 2011 Stabilization • Linear controllers – Passivity based analysis • Since E dE [J R ( x )]xe R i ( x ) x 0 then, dE Vo Ri1 x1 0 PL x2 Vo I L x R R 0 2 i2 i2 Hence, 1 Vo Ri1 ( x1 I L ) E PL Vo PL x2 x Cx I and since 1 and 2 L x2 Ri 2 x2 Ri 2 d Thus, R R 1 d Ri1Cx2 i1 x2 Vo i1 Vo E Ri 2 Ri 2 20 © Alexis Kwasinski, 2011 This is a PD controller (e VO x2 ) Stabilization • Linear controllers – Passivity based analysis • Remarks for the buck converter: • xe is not A.S. because the duty cycle must be between 0 and 1 • Trajectories to the left of γ need to have d >1 to maintain stability • Using this property as the basis for the analysis it can be obtained that a necessary but not sufficient condition for stability is P dE x2 1 PL x1 L2 L C x2 x2 • Line and load regulation can be achieved by adding an integral term but stability is not ensured d D k p e kd e ki edt 21 © Alexis Kwasinski, 2011 Stabilization • Linear controllers x1 • Experimental results (buck converter) x2 22 © Alexis Kwasinski, 2011 Stabilization • Linear controllers • Experimental results (buck converter) Line regulation Load regulation 23 © Alexis Kwasinski, 2011 Stabilization • Linear controllers – Passivity based analysis • The same analysis can be performed for boost and buck-boost converters yielding, respectively D ' D '2 4 d ' 1 d Ri1 1 Ce e V0 Ri 2 , 2 2 E Ri1 x2 V0 E 4 Cx 2 (V0 E ) (V0 E ) Ri 2 V0 E d' 2 • Engineering criteria dictate that the non-linear PD controller can be translated into an equivalent linear PD controller of the form: d ' kd e k p e D ' • Formal analytical solution: min e emax , e emax d ' d '(k p , kd ) subject to 0 1 d d max 0 1 d d max 24 © Alexis Kwasinski, 2011 Stabilization • Linear controllers – Passivity based analysis • Perturbation theory can formalize the analysis (e.g. boost conv.) • Consider : x f (t , x ) M 1[J R t ]x Unperturbed system with nonlinear PD controller, with • And 0 d ' J d ' 0 : p x f (t , x ) g (t , x ) M 1[ J R t ]x Perturbed system with linear PD controller, with 0 d ' J d ' 0 •The perturbation is g (t , x ) M 1[J J ]x 25 © Alexis Kwasinski, 2011 Stabilization • Linear controllers – Passivity based analysis • Lemma 9.1 in Khalil’s: Let x 0 be an exponentially stable equilibrium . Let V (t , x ) be a Lyapunov function of the point of the nominal system nominal system which satisfies 2 c1 x V (t , x ) c2 x 2 V (t , x ) V (t , x ) f (t , x ) c3 x t x 2 V (t , x ) c4 x x in [0,∞) X D with c1 to c4 being some positive constants. Suppose the perturbation term g (t , x ) satisfies g (t , x ) x t 0, x where : x and Then, the origin is an exponentially stable equilibrium point of the . perturbed system p 26 © Alexis Kwasinski, 2011 c3 c4 Stabilization • Linear controllers – Passivity based analysis •Taking V (t , x ) H ( x ) •It can be shown that c1 = λmin(M) c2 = λmax(M) c3 min (2J 3R t ) c4 M max (MT M) max(L2 , C 2 ) max(L, C ) •Also, x 0 is an exponentially stable equilibrium point of , g (t ,0) 0 and g (t , x ) x t 0, x where : with x ( d ' d ') (d ' d ') G max , L C min (2J 3R t ) ' ' d d •Thus, stability is ensured if C L max , L C 27 © Alexis Kwasinski, 2011 Stabilization • Linear controllers • Experimental results boost converter Load Regulation 28 Line Regulation © Alexis Kwasinski, 2011 Stabilization • Linear controllers • Experimental results voltage step-down buck-boost converter Load Regulation 29 Line Regulation © Alexis Kwasinski, 2011 Stabilization • Linear controllers • Experimental results voltage step-up buck-boost converter Load Regulation 30 Line Regulation © Alexis Kwasinski, 2011 Stabilization • Linear Controllers - passivity-based analysis • All converters with CPLs can be stabilized with PD controllers (adds virtual damping resitances). • An integral term can be added for line and load regulation • Issues: Noise sensitivity and slow 31 © Alexis Kwasinski, 2011 Stabilization • Boundary controllers • Boundary control: state-dependent switching (q = q(x)). • Stable reflective behavior is desired. • At the boundaries between different behavior regions trajectories are tangential to the boundary • An hysteresis band is added to avoid chattering. This band contains the boundary. 32 © Alexis Kwasinski, 2011 Stabilization • Geometric controllers – 1st order boundary • Linear switching surface with a negative slope: x1 k ( x2 x2OP ) x1OP Switch is on below the boundary and off above the boundary 33 © Alexis Kwasinski, 2011 Stabilization • 1st order boundary controller (buck converter) • Switching behavior regions are found considering that trajectories are tangential at the regions boundaries. fx x x dx 1 1 k 1 1OP f x2 dx2 x2 x2OP • For ON trajectories: x x C ( E x2 ) 1 1OP L( x1 PL / x2 ) x2 x2OP ON ( x ) : L[ x12 x2 x1OP x1 x2 PL x1 PL x1OP ] C[ Ex2OP x2 ( E x2OP ) x22 x23 ] 0 • For OFF trajectories: x1 x1OP C ( x2 ) L( x1 PL / x2 ) x2 x2OP OFF ( x ) : L[ x12 x2 x1OP x1 x2 PL x1 PL x1OP ] C[ x2OP x22 x23 ] 0 34 © Alexis Kwasinski, 2011 Stabilization • 1st order boundary controller (buck converter) • Lyapunov is used to determine stable and unstable reflective regions. This analysis identifies the need for k < 0 C V ( x) x xOP 2 35 2 0 P V ( x) (1 k 2 )( x2 x2OP ) x1 L x2 © Alexis Kwasinski, 2011 Stabilization • 1st order boundary controller (buck converter) • Simulated and experimental verification L = 480 µH, C = 480 µF, E = 17.5 V, PL = 60 W, xOP = [4.8 36 © Alexis Kwasinski, 2011 12.5] T Stabilization • 1st order boundary controller (buck converter) • Simulated and experimental verification Buck converter with L = 500 μH, C = 1 mF, E = 22.2 V, PL = 108 W, k = –1, xOP = [6 18] T 37 © Alexis Kwasinski, 2011 Stabilization • 1st order boundary controller (buck converter) • Line regulation is unnecessary. Load regulation based on moving boundary Line regulation: ∆E = +10V (57%) Load regulation: ∆PL = +20W (+29.3%) 38 Line regulation: ∆E = +10V (57%) No regulation: ∆PL = +45W (+75%) © Alexis Kwasinski, 2011 Load regulation: ∆PL = +45W (+75%) Stabilization • 1st order boundary controller (boost and buck-boost) • Same analysis steps and results than for the buck converter. Buck-Boost (k<0) Boost (k<0) Buck-Boost (k>0) Boost (k>0) 39 © Alexis Kwasinski, 2011 Stabilization • 1st order boundary controller (boost and buck-boost) • Experimental results. Buck-Boost (k<0) Boost (k<0) Buck-Boost (k>0) Boost (k>0) 40 © Alexis Kwasinski, 2011 Stabilization • 1st order boundary controller (boost and buck-boost) • Experimental results for line and load regulation Buck-Boost: Line regulation Boost: Line regulation Buck-Boost: Load regulation Boost: Load regulation 41 © Alexis Kwasinski, 2011 Stabilization • Geometric controllers • First order boundary with a negative slope is valid for all types of basic converter topologies. • Advantages: Robust, fast dynamic response, easy to implement . 42 © Alexis Kwasinski, 2011 Conclusions • Most renewable and alternative sources, energy storage, and modern loads are dc. • Integration can be achieved through power electronics, but other stability issues are introduced due to CPLs. • Control-related methods appear to be a more practical solution for CPL stabilization without reducing system efficiency. • Nonlinear analysis is essential due to nonlinear CPL behavior. •Boundary control offers more advantages than linear controllers and are equally simple to implement. • Extended work focusing on rectifiers and multiple-input converters. 43 © Alexis Kwasinski, 2011 References for Additional Details • A. Kwasinski and C. N. Onwuchekwa, “Dynamic Behavior and Stabilization of dc Micro-grids with Instantaneous Constant-Power Loads.” IEEE Transactions on Power Electronics, in print, appearing in the March 2011 issue. • C. N. Onwuchekwa and A. Kwasinski, “Analysis of Boundary Control for Buck Converters with Instantaneous Constant-Power Loads.” IEEE Transactions on Power Electronics, vol. 25, no. 8, pp. 2018-2032, August 2010. • C. Onwchekwa and A. Kwasinski, “Analysis of Boundary Control for Boost and Buck-Boost Converters in Distributed Power Architectures with Constant-Power Loads,” in Proc. IEEE Applied Power Electronics Conference (APEC) 2011, Fort Worth, Texas, March, 2011. • A. Kwasinski and P. T. Krein, “Stabilization of Constant Power Loads in Dc-Dc Converters Using Passivity-Based Control,” in Rec 2007 International Telecommunications Energy Conference (INTELEC), pp. 867-874. • A. Kwasinski and P. Krein, “Passivity-based control of buck converters with constant-power loads,” in Rec. PESC, 2007, pp. 259-265. 44 © Alexis Kwasinski, 2011