Four-Winding Transformer and Autotransformer
advertisement

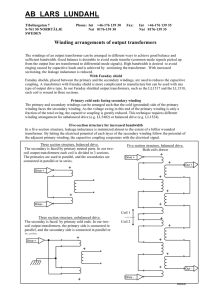
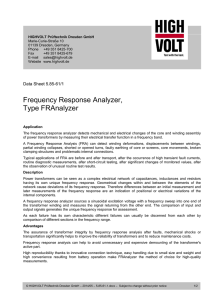
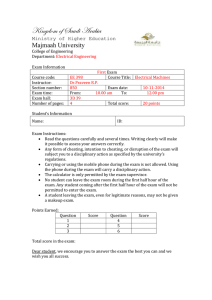
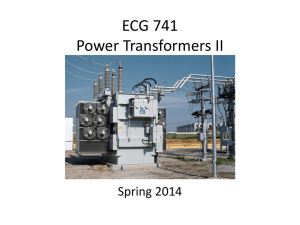
Four-Winding Transformer and Autotransformer Modeling For Load-Flow and Short-Circuit Analysis, Part I: Theory Carlos A. Muñoz Universidad Nacional de Ingeniería, Lima, Perú Alberto Rojas COVIEM S.A., Lima, Perú Abstract Purpose- This paper presents the theory for computing the positive and zero sequence admittance matrices of three-phase four-winding transformers and autotransformers. These matrices are required in load-flow and short-circuit calculations. Methodology- The positive and zero sequence impedances between windings, which are available from standard transformer test reports, are modeled as mutual impedances between each pair of windings. These mutual impedances are used to build a 4x4 impedance matrix taking into account the winding voltage ratios. Also a 4x4 matrix of voltage and current relationship is built. Using these two matrices, the positive sequence admittance matrix of a transformer or autotransformer is computed. For zero sequence admittance matrices, the connection group and grounding impedance of each winding is also taken into account. Research implications- This theory can be useful to upgrade load-flow and short-circuit software to handle four-winding transformers and autotransformers, in a reliable and straight-forward manner. Key words: Four-windings, transformers, autotransformers, sequence networks, load-flow, shortcircuit I. Introduction Four-winding transformers are encountered in high voltage power networks. The Peruvian power grid has 9 of these transformers. Load-flow and short-circuit software usually has models only for two-winding and three-winding transformers and autotransformers. The theory for modeling twowinding and three-winding transformers is presented in detail in the classic T&D book of the Westinghouse [1]. Reference [2] presents the Extended Cantilever Model (ECM) for four-winding transformers. The ECM model can be used for the positive sequence network. Nevertheless, reference [2] does not provide enough detailed models for the zero sequence network. A search of zero sequence models for four-winding transformers and autotransformers carried out in internet was not successful. Therefore, a research was undertaken to develop complete models of fourwinding transformers and autotransformers to be used for load-flow and short-circuit analysis. Section II presents the proposed approach. Section III shows the application of the proposed approach to compute the positive sequence admittance matrix of a four-winding transformer. In Section IV the proposed approach is used to obtain the zero sequence admittance matrices of some types of four-winding transformers and autotransformers. Section V presents the validation of the proposed approach. Finally, in Section VI the main conclusions of this research effort are outlined. The proposed approach can be applied also to transformers and autotransformers with more than four windings. The theory described in this paper can be easily generalized for such a purpose. II. Proposed Approach The standard approach for modeling a two-winding transformer is shown in Figure 1a; Zps is the short-circuit impedance in ohms measured at the primary winding with the secondary winding shortcircuited, Np is the number of turns of the primary winding and Ns is the number of turns of the secondary winding. The proposed approach converts Zps to a mutual impedance Mps using equation (1): Mps = (½) * Zps * Ns / Np (1) Page 1 of 12 Figure 1a Figure 1b In the proposed approach, current Ip at the primary winding provokes a voltage drop at the secondary winding equal to Mps * Ip, and current Is at the secondary winding provokes a voltage drop at the primary winding equal to Mps * Is. Therefore, the following relationship is satisfied: Vp + Mps * Is Ep Es Vs + Mps * Ip ------------------- = ----- = ----- = -----------------Np Np Ns Ns (2) Vp is the voltage at the terminals of the primary winding, Vs is the voltage at the terminals of the secondary winding, Ip and Is are the currents flowing into the primary and secondary windings respectively, and finally Ep and Es are voltages applied to an ideal transformer of ratio Np:Ns. Using equations (1) and (2), it can be shown that if the secondary winding is short-circuited (Vs equal to zero): Vp / Np = 2 * Mps * Ip / Ns (3) Vp = Zps * Ip (4) The proposed mutual impedance Mps allows to reproduce the 60 Hz or 50 Hz behavior of a twowinding transformer under a short-circuit condition. The open-circuit test provides a measured Ym magnetizing admittance in siemens that can be added to the model connecting it directly to voltage Ep. III Positive Sequence Admittance Matrix – Four-Winding Transformer Figure 2 shows a four-winding transformer. The windings are named primary, secondary, tertiary and quaternary. N1 is the secondary to primary voltage ratio, N2 is the tertiary to primary voltage ratio and N3 is the quaternary to primary voltage ratio. The short-circuit tests of this type of transformer give the following impedances: Zps, Zpt, Zpq (in ohms measured at the primary winding), Zst, Zsq (in ohms measured at the secondary winding), and Ztq (in ohms measured at the tertiary winding). Also, the open-circuit test gives the magnetizing admittance Ym (in siemens viewed at the primary side). Figure 2 Page 2 of 12 Using impedances Zps, Zpt, Zpq, Zst, Zsq and Ztq, the following six mutual impedances between windings can be computed: Mps = (½) * Zps * N1 Mpt = (½) * Zpt * N2 Mpq = (½) * Zpq * N3 Mst = (½) * Zst * N2 / N1 Msq = (½) * Zsq * N3 / N1 Mtq = (½) * Ztq * N3 / N2 (5) The following equations can be written relating voltages and currents at each winding: Vp + Mps*Is + Mpt*It + Mpq*Iq = Ep (6a) Vs + Mps*Ip + Mst*It + Msq*Iq = Es = N1*Ep (6b) Vt + Mpt*Ip + Mst*Is + Mtq*Iq= Et = N2*Ep (6c) Vq + Mpq*Ip + Msq*Is + Mtq*It = Eq = N3 * Ep (6d) Ym * (Vp + Mps*Is + Mpt*It + Mpq*Iq) = Ym * Ep = Im (6e) Ip + N1 * Is + N2 * It + N3 * Iq = Im (6f) Im is the magnetizing current in amperes referred to the primary winding. Using Vp, Vs/N1, Vt/N2 and Vq/N3 as variables for voltages, and Ip, N1*Is, N2*It and N3*Iq as variables for currents (all voltages and currents are referred to the primary side), the following 4x4 matrix equation can be written using equations (6a) to (6f): [VCR] * [V] = [ZMT] * [I] (7) Where [V] is a vector of 4 files containing: Vp, Vs/N1, Vt/N2 and Vq/N3, and [I] is a vector of 4 files containing: Ip, N1*Is, N2*It and N3*Iq. The 4x4 matrix [VCR] (voltage and current relationship) is as follows: [VCR] = 1 1 1 Ym -1 0 0 0 0 -1 0 0 0 0 -1 0 ZMpt ZMst ZMtt ICpt ZMpq ZMsq ZMtq ICpq (8) The 4x4 matrix [ZMT] is as follows: [ZMT] = ZMpp ZMsp ZMtp 1 ZMps ZMss ZMts ICps (9) The elements of matrix [ZMT] are: ZMpp =Mps/N1 ZMsp = Mpt/N2 ZMps = -Mps/N1 ZMss = ((Mst – N2*Mps)/N1)/N2 ZMpt = ((Mst – N1*Mpt)/N2)/N1 ZMst= -Mpt/N2 ZMpq = ((Msq – N1*Mpq)/N3)/N1 ZMsq = ((Mtq – N2*Mpq)/N3)/N2 Page 3 of 12 ZMtp = Mpq/N3 ICps = 1 – (Ym*Mps/N1) ZMts = ((Msq – N3*Mps)/N1)/N3 ICpt = 1 – (Ym*Mpt/N2) ZMtt = ((Mtq – N3*Mpt)/N2)/N3 ICpq = 1 – (Ym*Mpq/N3) ZMtq = -Mpq/N3 (10) The 4x4 positive sequence admittance matrix of the transformer, called [Ytxf], can be now computed as: -1 [Ytxf] = [ZMT] * [VCR] (11) [Ytxf] * [V] = [I] (12) -1 Matrix [ZMT] is the inverse of matrix [ZMT]. Matrices [ZMT] and [VCR] are non-symmetric, but matrix [Ytxf] is symmetric; this was verified by performing numerical experiments. Matrix [Ytxf] has units of siemens (referred to the primary winding) and it can be converted to per unit by multiplying it by the base impedance of the primary winding. The equations presented in this section can be used to create MS-Excel spreadsheets, if the resistive elements of Zps, Zpt, Zpq, Zst, Zsq, Ztq and Ym are neglected. MS-Excel allows inverting and multiplying real matrices. IV Zero Sequence Admittance Matrix In this section, the proposed approach is applied to several types of four-winding transformers and autotransformers. A few cases of all possible combinations of winding connections and grounding are covered. Interested readers can use this methodology to obtain the equations for other cases. A) Four-Winding Transformer YgYgYgD Figure 3 shows a four-winding transformer. The first three winding have a start connection and are grounded with impedances Zgp, Zgs and Zgt. The fourth winding has a delta connection. Figure 3 A four-winding transformer has six zero sequence impedances: Z0ps, Z0pt, Z0pq, Z0st, Z0sq and Z0tq. In a similar manner as equation (5), six zero sequence mutual impedances can be defined: M0ps, M0pt, M0pq, M0st, M0sq and M0tq. The following equations can be written relating zero sequence voltages and currents: Page 4 of 12 V0p – 3Zgp*I0p + M0ps*I0s + M0pt*I0t + M0pq*I0qd = E0p (13a) V0s – 3Zgs*I0s + M0ps*I0p + M0st*I0t + M0sq*I0qd = E0s = N1*E0p (13b) V0t – 3Zgt*I0t + M0pt*I0p + M0st*I0s + M0tq*I0qd = E0t = N2*E0p (13c) M0pq*I0p + M0sq*I0s + M0tq*I0t = E0qd = N3*E0p (13d) I0p + N1*I0s + N2*I0t + N3*I0qd = I0m = Y0m*E0p (13e) I0q is always zero, since the quaternary winding has a delta connection; but there is an I0qd current that flows in this delta winding. The elements of [Y0txf] allows to compute also I0qd, but the actual value of this current is I0qd/√3. Using V0p, V0s/N1, V0t/N2 and V0qd/N3 as voltage variables, and I0p, N1*I0s, N2*I0t and N3*I0qd as current variables; a 4x4 [ZMT0] matrix and a 4x4 [VCR0] matrix can be defined taking also into account equations (13a) to (13e): [VCR0] = [ZMT0] = 1 1 1 Y0m -1 0 0 0 0 -1 0 0 0 0 0 0 ZM0pp ZM0sp ZM0tp IC0pp ZM0ps ZM0ss ZM0ts IC0ps ZM0pt ZM0st ZM0tt IC0pt ZM0pq ZM0sq ZM0tq IC0pq (14) (15) The elements of matrix [ZMT0] are: ZM0pp = (M0ps/N1) + 3Zgp ZM0sp = (M0pt/N2)+3Zgp ZM0ps = -(M0ps+(3Zgs/N1))/N1 ZM0ss = (-M0ps+(M0st/N2))/N1 ZM0pt = (-M0pt+(M0st/N1))/N2 ZM0st = (M0pt+(3Zgt/N2))/N2 ZM0pq = (-M0pq+(M0sq/N1))/N3 ZM0sq = (-M0pq+(M0tq/N2))/N3 ZM0tp = (M0pq/N3) + 3Zgp IC0pp = 1 + Y0m*3Zgp ZM0ts = ((M0sq/N3)-M0ps)/N1 IC0ps = 1 – (Y0m*M0ps/N1) ZM0tt = ((M0tq/N3)-M0pt)/N2 IC0pt = 1 – (Y0m*M0pt/N2) ZM0tq = (-M0pq/N3) IC0pq = 1 – (Y0m*M0pq/N3) (16) -1 Now, the zero sequence admittance matrix [Y0txf] can be computed as [ZMT0] * [VCR0]. Matrix [Y0txf] has units of siemens referred to the primary winding, and it can be converted to per unit multiplying it by the base impedance of the primary winding. B) Four-Winding Autotransformer AgAgYgYg Figure 4 shows a four-winding autotransformer. The first two windings have a start autotransformer connection and they are grounded with impedance Zgp. The third and fourth windings have a start transformer connection and they are grounded with impedances Zgt and Zgq. Page 5 of 12 Figure 4 The primary winding P is also called winding X. A winding Y is modeled as connected between winding X and the secondary terminals. Therefore, in addition to zero sequence impedances Z0ps, Z0pt, Z0pq, Z0st, Z0sq and Z0tq, impedances Z0xy, Z0yt and Z0yq can be defined. These impedances can be computed using the following equations: 2 Z0xy = (N1/(N1-1)) * Z0ps (17a) Z0yt = N1*Z0ps + ((N1-1)/N1)*Z0st – (N1-1)*Z0pt (17b) Z0yq = N1*Z0ps + ((N1-1)/N1)*Z0sq – (N1-1)*Z0pq (17c) We can now compute the following zero sequence mutual impedances: M0xy = (½) * Z0xy * (N1-1) M0pt = (½) * Z0pt * N2 M0pq = (½) * Z0pq * N3 M0yt = (½) * Z0yt * N2/(N1-1) M0yq = (½) * Z0yq * N3/(N1-1) M0tq = (½) * Z0tq * N3/N2 (18) Using mutual impedances of equation (18), the following equations relating zero sequence voltages and currents can be derived: V0p – 3Zgp*(I0p+I0s) + M0xy*I0s + M0pt*I0t + M0pq*I0q = E0x (19a) V0s – 3Zgp*(I0p+I0s) + M0xy*I0p + 2*M0xy*I0s + (M0pt+M0yt)*I0t + (M0pq+M0yq)*I0q = E0s = N1*E0x (19b) V0t - 3Zgt*I0t + M0pt*I0p + (M0pt+M0yt)*I0s + M0tq*I0q = E0t = N2*E0x (19c) V0q – 3Zgq*I0q + M0pq*I0p + (M0pq+M0yq)*I0s + M0tq*I0t = E0q = N3*E0x (19d) I0p + N1*I0s + N2*I0t + N3*I0q = 0 (19e) Using V0p, V0s/N1, V0t/N2 and V0q/N3 as voltages variables, and I0p, N1*I0s, N2*I0t and N3*I0q (all voltages and currents are referred to the primary winding), matrices [ZMT0] and [VCR0] can be built. The elements of [ZMT0] are: ZM0pp = (M0xy+(N1-1)*3Zgp)/N1 ZM0sp = (M0pt/N2)+3Zgp 2 ZM0ps = ((2-N1)*M0xy+(N1-1)*3Zgp)/N1 ZM0ss = (((M0pt+M0yt)/N2)-M0xy+3Zgp)/N1 ZM0pt = (M0yt-(N1-1)*M0pt)/N1)/N2 ZM0st = -(M0pt+(3Zgt/N2))/N2 ZM0pq = (M0yq-(N1-1)*M0pq)/N1)/N3 ZM0sq = ((M0tq/N2)-M0pq)/N3 Page 6 of 12 ZM0tp = (M0pq/N3) + 3Zgp IC0pp = 1 ZM0ts = ((M0pq+M0yq)/N3)-M0xy+3Zgp)/N1 IC0ps = 1 ZM0tt = ((M0tq/N3)-M0pt)/N2 IC0pt = 1 ZM0tq = -(M0pq+(3Zgq/N3))/N3 IC0pq = 1 (20) Matrix [VCR0] is as follows: [VCR0] = 1 1 1 0 -1 0 0 0 0 -1 0 0 0 0 -1 0 (21) -1 Finally, the zero sequence admittance matrix [Y0txf] can be computed as [ZMT0] * [VCR0]. C) Four-Winding Autotransformer AgAgYgD Figure 5 shows a four-winding autotransformer. The first two windings have a start autotransformer connection and are grounded with impedance Zgp. The third winding has a start transformer connection and is grounded with impedance Zgt. The fourth winding has a delta connection. Figure 5 Using equations (17) and (18) the mutual impedances M0xy, M0pt, M0pq, M0yt, M0yq and M0tq are computed. The following equations can be written relating zero sequence voltages and currents: V0p – 3Zgp*(I0p+I0s) + M0xy*I0s + M0pt*I0t + M0pq*I0dq = E0x (22a) V0s – 3Zgp*(I0p+I0s) + M0xy*I0p + 2*M0xy*I0s + (M0pt+M0yt)*I0t + (M0pq+M0yq)*I0qd = N1*E0x (22b) V0t – 3Zgt*I0t + M0pt*I0p + (M0pt+M0yt)*I0s + M0tq*I0qd = E0t = N2*E0x (22c) M0pq*I0p + (M0pq+M0yq)*I0s+ M0tq*I0t = E0qd = N3*E0x (22d) I0p + N1*I0s + N2*I0t + N3*I0qd = 0 (22e) Page 7 of 12 Using V0p, V0s/N1, V0t/N2 and V0qd/N3 as voltages variables, and I0p, N1*I0s, N2*I0t and N3*I0qd as current variables (all voltages and currents are referred to the primary winding), matrices [ZMT0] and [VCR0] can be built. The elements of [ZMT0] are: ZM0pp = (M0xy+(N1-1)*3Zgp)/N1 ZM0sp = (M0pt/N2)+3Zgp 2 ZM0ps = ((2-N1)*M0xy+(N1-1)*3Zgp)/N1 ZM0ss = (((M0pt+M0yt)/N2)-M0xy+3Zgp)/N1 ZM0pt = (M0yt-(N1-1)*M0pt)/N1)/N2 ZM0st = -(M0pt+(3Zgt/N2))/N2 ZM0pq = (M0yq-(N1-1)*M0pq)/N1)/N3 ZM0sq = ((M0tq/N2)-M0pq)/N3 ZM0tp = (M0pq/N3) + 3Zgp IC0pp = 1 ZM0ts = ((M0pq+M0yq)/N3)-M0xy+3Zgp)/N1 IC0ps = 1 ZM0tt = ((M0tq/N3)-M0pt)/N2 IC0pt = 1 ZM0tq = -(M0pq/N3) IC0pq = 1 (23) Matrix [VCR0] is as follows: [VCR0] = 1 1 1 0 -1 0 0 0 0 -1 0 0 0 0 0 0 (24) -1 Finally, the zero sequence admittance matrix [Y0txf] can be computed as [ZMT0] * [VCR0]. D) Four-Winding Autotransformer AAYgD Figure 6 shows a four-winding autotransformer. The first two windings have a start autotransformer connection and are ungrounded. The third winding has a start transformer connection and is grounded with impedance Zgt. The fourth winding has a delta connection. Figure 6 Using equations (17) and (18) the mutual impedances M0xy, M0pt, M0pq, M0yt, M0yq and M0tq are computed. The following equations can be written relating zero sequence voltages and currents: V0p – V0np + M0xy*I0s + M0pt*I0t + M0pq*I0qd = E0x (25a) V0s – V0np + M0xy*I0s + (M0pt+M0yt)*I0t + (M0pq+M0yq)*I0dq = N1*E0x (25b) Page 8 of 12 V0t – 3Zgt*I0t + M0yt*I0s + M0tq*I0qd = E0t = N2*E0x (25c) M0yq*I0s + M0tq*I0t = E0qd = N3*E0x (25d) ((N1-1)/N1)*(N1*I0s) + N2*I0t + N3*I0qd = 0 (25e) Using V0p, V0s/N1, V0t/N2 and V0qd/N3 as voltages variables, and I0p, N1*I0s, N2*I0t and N3*I0qd as current variables (all voltages and currents are referred to the primary winding); matrices [ZMT0] and [VCR0] can be built. The elements of [ZMT0] are: ZM0pp = M0xy ZM0sp = M0xy ZM0ps = (M0xy-((N1-1)/N3)*M0yq)/N1 ZM0ss = (M0xy+M0yt/N2-(N1/N3)*M0yq)/N1 ZM0pt = (M0yt-((N1-1)/N3)*M0tq)/N2 ZM0st = (M0yt-((N1/N3)*M0tq)-(3Zgt/N2))/N2 ZM0pq = M0yq/N3 ZM0sq = (M0yq+(M0tq/N2))/N3 ZM0tp = -(M0yq/N3) IC0pp = 0 ZM0ts = -(M0yt)/N2)/N1 IC0ps = (N1-1)/N1 ZM0tt = ((M0tq/N3)+(3Zgt/N2))/N2 IC0pt = 1 ZM0tq = -(M0tq/N2)/N3 IC0pq = 1 (26) Matrix [VCR0] is as follows: [VCR0] = 1 1 0 0 -N1 -N1 0 0 0 -1 1 0 0 0 0 0 (27) -1 Finally, the zero sequence admittance matrix [Y0txf] can be computed as [ZMT0] * [VCR0]. V Validation A) Software Tools The equations presented in this paper have been used to create MS-Excel spreadsheets to model several types of four-winding transformers and autotransformers. Since MS-Excel handles only real matrices, all the impedances, including grounding impedances, are modeled as reactances; the resistive elements are neglected. Another software tool used for validation is WinFdc. WinFdc is a Peruvian load-flow, short-circuit and harmonics software developed by the authors. WinFdc allows currently modeling balanced three-phase networks with two-winding and three-winding transformers and autotransformers. The validation of the proposed approach, as shown in this section, was successful. Therefore, WinFdc will be upgraded to model four-winding transformers and autotransformers. The results of this software development effort will be soon presented in a companion paper [3]. Page 9 of 12 B) Four-Winding Transformer Data The parameters of a four-winding YgYgYgD transformer, installed at 138 kV Juliaca substation in Peru, are used for the validation process. According to test reports, the parameters are: Rated voltages: 138/60/22.9/10 kV Base power for impedances: 30 MVA Zps = 0.10160 pu Zpt = 0.24960 pu Zpq = 0.16348 pu Zst = 0.13080 pu Zsq = 0.06360 pu Ztq = 0.11940 pu Ym = 0.00110 pu C) Methodology The methodology for validation with MS-Excel was to build the positive and zero sequence matrices [ZMT] and [VCR], and then obtain the positive and zero sequence admittance matrices for the fourwinding transformer or autotransformer. Source impedances are added to build the positive and zero sequence network admittance matrices [Y1bus] and [Y0bus]. Then, these matrices are inverted to get [Z1bus] and [Z0bus]. The Thevenin impedances are computed manually and compared with the diagonal elements of [Z1bus] and [Z0bus].Also, WinFdc is used to model threewinding transformers and autotransformers when one of the four windings has no impact in shortcircuit calculations. D) Positive Sequence Using Juliaca’s transformer parameters and assuming the following per unit taps values: tp = 0.975 (primary tap) ts = 1.075 (secondary tap) tt = 0.925 (tertiary tap) tq = 1.025 (quaternary tap) Matrix [Ytxf] in pu at 100 MVA is: P S T Q P S T 3.13008774 -2.89809177 0.27653171 -2.89809177 7.16731813 -1.39510638 0.27653171 -1.39510638 3.25040675 -0.18731366 -3.50129112 -1.73301081 Ytxf pu at 100 MVA including winding taps Q -0.18731366 -3.50129112 -1.73301081 5.41426573 Matrix [Ytxf] is symmetric. Connecting the primary winding to an infinite bus (Thevenin impedance equal to 1.0E-12 pu at 100 MVA), [Z1bus] in pu at 100 MVA is: P P S T Q S T 1E-12 1.1025E-12 9.48588E-13 1.1025E-12 0.391360732 0.365243968 9.48588E-13 0.365243968 0.711831137 1.05119E-12 0.369992848 0.464040119 Z1bus pu at 100 MVA - Winding P at Infinite Bus Page 10 of 12 Q 1.05119E-12 0.369992848 0.464040119 0.572494845 Computing the Thevenin impedances at 100 MVA manually, we get: -1 -1 2 Zps = (((0.10160/2) +(0.0011)) + (0.10160/2))*1.075 *(100/30) = 0.391360732 -1 -1 2 Zpt = (((0.24960/2) +(0.0011)) + (0.24960/2))*0.925 *(100/30) = 0.711831143 -1 -1 2 Zpq = (((0.16348/2) +(0.0011)) + (0.16348/2))*1.025 *(100/30) = 0.572494846 The same values of Thevenin impedances are obtained. Also, this validation process was performed connecting the secondary, tertiary and quaternary windings to an infinite bus once at the time; the same values of Thevenin impedances were obtained. This validates the proposed approach for positive sequence. E) Zero Sequence – Transformer YgYgYgD All grounding impedances are zero. Using the same data of Juliaca’s four-winding transformer, and assuming all taps equal to 1.000 pu, we get [Y0txf] as: Ytxf0 P S T QD P S T 8.282715198 -3.037522334 -1.387223576 -3.037522334 2.97544401 0.249312769 -1.387223576 0.249312769 2.781055032 -3.857969287 -0.187234445 -1.643144225 Ytxf Autotransformer YgYgYgD in pu at 100 MVA QD 0 0 0 0 The fourth file of [Y0txf] allows computing the zero sequence current flowing in the delta winding. We can set to zero all the values of the fourth file and use [Ytxf0] as: Ytxf0 P S T D P S T 8.282715198 -3.037522334 -1.387223576 -3.037522334 2.97544401 0.249312769 -1.387223576 0.249312769 2.781055032 0 0 0 Ytxf Autotransformer YgYgYgD in pu at 100 MVA D 0 0 0 0 We connect now the primary winding to a source with impedances Z1 = Z0 = 1.0E-4 at 100 MVA, and simulate a line to ground short-circuit at the secondary winding. In MS-Excel, using the proposed approach, we obtain a fault current equal to 1.235029547 kA. Since the tertiary winding is not connected to other equipment, WinFdc was used to model Juliaca’s transformer as a threewinding transformer YgYgD; the fault current calculated with WinFdc was 1.235 kA. Now, we model the tertiary winding of Juliaca’s transformer as connected to an external network with Z1 = ∞ pu and Z0 = 0.1pu at 100 MVA. In this case, using the proposed approach in MS-Excel, we obtain 1.23745026 kA. There is an exact agreement in short-circuit calculations using the proposed approach and using WinFdc. F) Zero Sequence – Autotransformer AAYgD All grounding impedances are zero, unless indicated otherwise. Using the same data of Juliaca’s four-winding transformer, but modeling it as an autotransformer with the 60 kV winding as the primary winding, and assuming all taps equal to 1.000 pu, we get [Y0txf] as: Ytxf0 P S T QD P S T 0.469803866 -1.080548892 0.047893238 -1.080548892 2.485262452 -0.110154448 0.047893238 -0.110154448 2.517445197 0.562851788 -1.294559111 -2.455183987 Ytxf Autotransformer AAYgD in pu at 100 MVA Page 11 of 12 QD 0 0 0 0 We can set to zero the fourth file of [Y0txf] and it becomes: Ytxf0 P S T D P S T 0.469803866 -1.080548892 0.047893238 -1.080548892 2.485262452 -0.110154448 0.047893238 -0.110154448 2.517445197 0 0 0 Ytxf Autotransformer in pu at 100 MVA D 0 0 0 0 Now we connect the primary winding to a source with impedances Z1 = Z0 = 1.0E-4 at 100 MVA, and simulate a line to ground short-circuit at the secondary winding. In MS-Excel, using the proposed approach, we obtain a fault current equal to 1.161378905 kA. Since the tertiary winding is not connected to any other equipment, WinFdc was used to model Juliaca’s transformer as a threewinding AAD autotransformer; the fault current calculated with WinFdc was 1.161 kA. This autotransformer was also modeled in MS-Excel as AgAgYgD with Zgp equal to 1.0E+12 Ohms, and the fault current obtained with proposed the approach was 1.161380098 kA. Now, we assume that the tertiary winding of this autotransformer is connected to and external network with Z1 = ∞ pu and Z0 = 0.1 pu at 100 MVA. In this case, using the proposed approach, we obtain in MS-Excel 1.162050819 kA. Also the currents in amperes flowing into the primary and secondary terminals of this AAYgD autotransformer have the same value but with opposite sign; these currents are not transformed as expected. There is an exact agreement in short-circuit calculations using the proposed approach and using WinFdc. VI Conclusion A theoretical approach was presented for modeling three-phase four-winding transformers and autotransformers for load-flow and short-circuit analysis. Equations were presented for several types of transformers and autotransformers for building the positive and zero sequence admittance matrices. This approach was successfully validated using it in MS-Excel and comparing it with short-circuit calculations performed with WinFdc. The transformer or autotransformer data needed in this approach comes directly from standard transformer test reports. This approach can be used to upgrade load-flow and short-circuit software packages for modeling four-winding transformers and autotransformers. This approach can be applied also to transformers with more than four windings. References: [1] [2] [3] [4] Central Station Engineers of the Westinghouse Electric Corporation, "Electrical Transmission and Distribution Reference Book", East Pittsburgh, Pennsylvania, USA, September 1950. Teshmont Consultants LP, "Transformer Modelling Guide”, Calgary, Alberta, Canada, July 08, 2014. Guide downloaded from internet. C. A. Muñoz, A. Rojas, "Four-Winding Transformers and Autotransformers Modeling for Load-Flow and Short-Circuit Analysis, Part II: Application", in preparation and to be soon uploaded to www.researchgate.net. A. Rojas, C. A. Muñoz, “WinFdc 2.02 User Manual”, in Spanish, COVIEM S.A., Lima, Peru. About the authors: Carlos A. Muñoz is associate professor at Universidad Nacional de Ingeniería at Lima, Peru. He is also the general manager of COVIEM S.A. COVIEM designs, builds and carries out the commissioning of electrification projects. His research interests are load-flow, short-circuit, and electrical protections. He can be contacted at cmunozm@uni.edu.pe. Alberto Rojas is a consultant engineer. He works at COVIEM S.A. in Lima, Peru, His research interests are load-flow, short-circuit, harmonics and grounding analysis; and also software development for power systems studies. He can be contacted at arojas222@yahoo.es. Manuscript finished on March 18, 2016. Page 12 of 12