1 Apr 2004
AR
AR220-BE06-10.tex
AR220-BE06-10.sgm
LaTeX2e(2002/01/18)
P1: IKH
AR REVIEWS IN ADVANCE10.1146/annurev.bioeng.6.040803.140143
V I E W
A
N
I N
C E
S
R
E
20:30
Annu. Rev. Biomed. Eng. 2004. 6:10.1–10.33
doi: 10.1146/annurev.bioeng.6.040803.140143
c 2004 by Annual Reviews. All rights reserved
Copyright D V A
MOLECULAR MACHINES
C. Mavroidis,1 A. Dubey,2 and M.L. Yarmush3
1
Department of Mechanical and Industrial Engineering, Northeastern University,
Boston Massachusetts 02115; email: mavro@coe.neu.edu
2
Department of Mechanical and Aerospace Engineering, Rutgers University,
Piscataway, New Jersey 08854; email: dubey@rci.rutgers.edu
3
Department of Biomedical Engineering, Rutgers University, Piscataway,
New Jersey 08854; email: ireis@sbi.org
Key Words molecular motors, nanomachines, nanodevices, nanomotors,
bionanotechnology
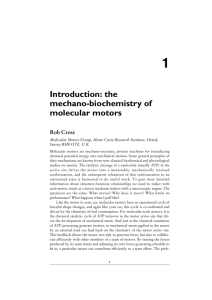
■ Abstract Molecular machines are tiny energy conversion devices on the molecular-size scale. Whether naturally occurring or synthetic, these machines are generally
more efficient than their macroscale counterparts. They have their own mechanochemistry, dynamics, workspace, and usability and are composed of nature’s building blocks:
namely proteins, DNA, and other compounds, built atom by atom. With modern scientific capabilities it has become possible to create synthetic molecular devices and
interface them with each other. Countless such machines exist in nature, and it is possible to build artificial ones by mimicking nature. Here we review some of the known
molecular machines, their structures, features, and characteristics. We also look at certain devices in their early development stages, as well as their future applications and
challenges.
CONTENTS
INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10.2
ATP-BASED PROTEIN MOLECULAR MACHINES . . . . . . . . . . . . . . . . . . . . . . . .10.2
The F0 F1 ATP Synthase Motors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10.3
The Kinesin, Myosin, Dynein, and Flagella Molecular Motors . . . . . . . . . . . . . . . .10.6
DNA-BASED MOLECULAR MOTORS/DEVICES . . . . . . . . . . . . . . . . . . . . . . . . . 10.13
.
The DNA Tweezers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10.15
.
Rotary DNA Actuator Concept . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10.15
.
INORGANIC (CHEMICAL) MOLECULAR MACHINES . . . . . . . . . . . . . . . . . . . 10.16
.
The Rotaxanes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10.16
.
The Catenanes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10.17
.
Other Inorganic Molecular Machines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10.19
.
OTHER PROTEIN-BASED MOTORS UNDER DEVELOPMENT . . . . . . . . . . . . . 10.20
.
Viral Protein Linear Motors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10.20
.
Synthetic Contractile Polymers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10.20
.
CONCLUSIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10.21
.
1523-9829/04/0815-0001$14.00
10.1
1 Apr 2004
20:30
10.2
AR
AR220-BE06-10.tex
MAVROIDIS
DUBEY
AR220-BE06-10.sgm
LaTeX2e(2002/01/18)
P1: IKH
AR REVIEWS IN ADVANCE10.1146/annurev.bioeng.6.040803.140143
YARMUSH
INTRODUCTION
Molecular machines can be defined as devices that can produce useful work through
the interaction of individual molecules at the molecular scale of length. A convenient unit of measurement at the molecular scale would be a nanometer. Hence,
molecular machines also fall into the category of nanomachines. Molecular machines depend on inter- and intramolecular interactions for their function. These
interactions include forces such as the ionic and Van der Waal’s forces and are a
function of the geometry of the individual molecules. The interaction between two
given molecules can be well understood by a set of laws governing them, which
brings in a definite level of predictability and controllability of the underlying
mechanics. Mother Nature has her own set of molecular machines that have been
working for centuries and have become optimized for performance and design
over the ages. As our knowledge and understanding of these numerous machines
continues to increase, we now see a possibility of using the natural machines, or
creating synthetic ones from scratch, by mimicking nature. In this review, we try
to understand the principles, theory, and utility of the known molecular machines
and look into the design and control issues for creation and modification of such
machines. A majority of natural molecular machines are protein based, whereas the
DNA-based molecular machines are mostly synthetic. Nature deploys proteins to
perform various cellular tasks, from moving cargo to catalyzing reactions, whereas
DNA has been retained as an information carrier. Hence, it is understandable that
most of the natural machinery is built from proteins. With the powerful crystallographic techniques now available, protein structures are clearer than ever. The
ever-increasing computing power makes it possible to dynamically model protein
folding processes and predict the conformations and structure of lesser known
proteins. These findings help unravel the mysteries associated with the molecular
machinery and pave the way for the production and application of these miniature
machines in various fields, including medicine, space exploration, electronics and
military. We divide the molecular machines into three broad categories—protein
based, DNA-based, and chemical molecular motors.
ATP-BASED PROTEIN MOLECULAR MACHINES
Three naturally existing rotary motors have been identified and studied in detail
so far. Two form the F0F1-ATP synthase, and the third one is the bacterial flagellar motor. The protein-based molecular motors rely on an energy-rich molecule
known as adenosine triphosphate (ATP), which is basically a nucleotide having
three phosphate molecules that play a vital role in its energetics, and make it
an indispensable commodity of life. The machines described in this section, the
F0-F1 ATPase, the kinesin, myosin, and dynein superfamily of protein molecular
machines, and bacteria flagellar motors all depend, directly or indirectly, on ATP
for their input energy. These machines, which have been carrying out vital life
1 Apr 2004
20:30
AR
AR220-BE06-10.tex
AR220-BE06-10.sgm
LaTeX2e(2002/01/18)
P1: IKH
AR REVIEWS IN ADVANCE10.1146/annurev.bioeng.6.040803.140143
MOLECULAR MACHINES
10.3
functions both inside and outside cells for millions of years, have now been segregated out of their natural environment and are seen as energy conversion devices
to obtain forces, torques, and motion. One disadvantage associated with ATP dependence is that the ATP creation machinery itself could be many times heavier
and bulkier than the motors, thereby making the assembly more complex. These
machines perform best in their natural environment, and in the near future it may
not be possible to have them as a part of feasible biomimetic molecular machinery.
The F0F1 ATP Synthase Motors
ATP is regarded as the energy currency of biological systems (1). The ATP molecule
owes much of its energy to the terminal three phosphate ions attached to adenosine
base (2). In 1941 the role of ATP in the energy conversion process in living beings
was recognized (3). However, the mode of transfer and structure of the enzyme was
unknown. When this currency is utilized (i.e., the energy of the molecule that is used
to drive a biological process), the terminal anhydride bond in the ATP molecule
has to be split. This leaves adenosine diphosphate (ADP) and a phosphate ion (Pi)
as the products, which are recombined to form ATP by a super efficient (4) enzyme
motor assembly called the F0-F1 ATP synthase (F0F1 ATPase). ATP synthase is
present inside the mitochondria of animal cells, in plant chloroplasts, in bacteria,
and some other organisms. ATP synthase was first seen in 1962 in an electron
microscopy experiment on bovine heart mitochondria, as 10 nm diameter knobs
(5). Their importance in energy conversion was realized, but their functioning
was still unknown. In 1966 the relation of the thus far unknown knobs to the
production of ATP was established (6), which provided one of the first structures
of the enzyme.
The ATP synthase is actually a combination of two motors functioning together, the hydrophobic transmembrane F0-ATPase motor and the globular F1ATPase motor (7). Both motors have distinct structures and functions. There are
different abbreviations used for the F1-ATPase based on their sources; the heart
mitochondrial motors are called m F1, chloroplast motors are cF1, those obtained
from Escherichia coli are termed EcF1, and the ones from Kagawa’s thermophilic
bacterium are known as TF1 (2). The F0 motor has organism-dependant structural
variations. In addition, the regulation of catalysis in ATP synthase depends on the
organism’s source (1). In animal mitochondria, this motor is embedded in the inner
mitochondrial membrane and uses an ion-motive force for its function. Initially,
however, it was believed that the force was proton-motive (8) only until it was
shown that, in some cases, Na+ ions induce the motive force for the F0 motor (9);
hence the term ion-motive force. The proton-motive force can be defined as the
work per unit charge that a proton traveling through a membrane can perform.
The F1 motor, powered by hydrolysis of ATP, is
composed of a central protein stalk, called the γ -subunit, surrounded by three
copies each of α- and β-subunits. The α- and β-subunits are arranged
STRUCTURE: F1-ATPase MOTOR
1 Apr 2004
20:30
10.4
AR
AR220-BE06-10.tex
MAVROIDIS
DUBEY
AR220-BE06-10.sgm
LaTeX2e(2002/01/18)
P1: IKH
AR REVIEWS IN ADVANCE10.1146/annurev.bioeng.6.040803.140143
YARMUSH
Figure 1 The F0F1-ATPase motors. The F0 motor is embedded in the inner mitochondrial membrane of the mitochondria. F0 is typically composed of a, b, and c subunits
as shown. The F1 motor is the soluble region composed of three α-, three β-, one each
of γ -, δ- and ε-subunits.
alternately so that they make a symmetric circular pattern when viewed from
the top. There are δ-subunits attached to the periphery of the α-β cylinder and the
ε-subunits are present at the base of the γ -subunits, as shown in Figure 1. Hence,
the F1 motor is composed of nine polypeptides (10). The α- and the β-subunits
contain nucleotide-binding sites that bind ATP/ADP molecules. The nucleotidebinding sites in the α-subunits simply bind the nucleotide, whereas e those in the
β-subunit actually perform the catalysis. The a, b, and the c subunits shown in
Figure 1 are a part of the F0 motor discussed below.
The binding-change mechanism to explain the function of F1-ATPase was proposed in 1973 (11). The mechanism, as known today,
shows that each of the β-subunits take three forms: O (open), L (loose), and
T (tight) binding site. When the subunit is in the O form, it is catalytically inactive
and has very low affinity to bind substrates. In the L form, the subunit loosely binds
substrates (ADP and Pi), although it is catalytically inactive. In the T form, the
ADP and Pi are converted into a tightly bound ATP until a conformational change
converts the T-site into an O-site, thereby allowing the release of the newly formed
ATP (12). The mechanism is shown in Figure 2.
The conformational change in the β-subunits is triggered by the rotation of
the 4.5 nm long γ -subunit, which acts as a link connecting the F1-ATPase to the
FUNCTION: F1-ATPase MOTOR
1 Apr 2004
20:30
AR
AR220-BE06-10.tex
AR220-BE06-10.sgm
LaTeX2e(2002/01/18)
P1: IKH
AR REVIEWS IN ADVANCE10.1146/annurev.bioeng.6.040803.140143
MOLECULAR MACHINES
10.5
Figure 2 The binding-change mechanism of F1-ATPase. The three catalytic sites
bind ADP/ATP alternately in L (loose), T (tight) and O (open) fashion. ADP and Pi are
initially loosely bound, then the binding becomes tight, with the conversion of ADP +
Pi into ATP, which is finally released when the open conformation is achieved.
F0-ATPase. This was shown experimentally in 1997 (13). In this experiment, the F1ATPase was attached to a nickel-coated glass surface; a 1–3 µm long fluorescently
labeled actin filament was attached to the other end of the γ -subunit. The rotation
could then be observed through a fluorescence microscope, which was extremely
interesting because the motor has a diameter of about 10 nm, whereas it could
support and rotate a structure about one hundred times larger! However, the rate of
rotation was reduced by 50 times to 1 rotation per second. The experimental setup
is shown in Figure 3. F1-ATPase can produce 80–100 pN-nm of rotary torque (4).
Since the rotation of the γ -subunit has been shown
to play the essential role in ATP creation, it is now imperative to see what causes
STRUCTURE: F0-ATPase MOTOR
Figure 3 Rotation of the ATPase motor as shown experimentally in (13).
A 1–4 µm long fluorescently tagged actin filament was attached to the F0ATPase using streptavidin to observe the rotation of the ATP synthase motor.
1 Apr 2004
20:30
10.6
AR
AR220-BE06-10.tex
MAVROIDIS
DUBEY
AR220-BE06-10.sgm
LaTeX2e(2002/01/18)
P1: IKH
AR REVIEWS IN ADVANCE10.1146/annurev.bioeng.6.040803.140143
YARMUSH
the γ -subunit to rotate. The answer lies in the functioning of the F0-ATPase motor.
Although the structure of the F0-ATPase is not as well known as that of the F1ATPase, findings indicate that its structure depends on its source. The F0 domain
from the eubacterial enzymes, exemplified by E. coli. (14), has three subunits
termed a, b, and c with 1 unit of a, 2 units of b, and 9 to12 (15) units of c subunits
(16, 17). Hence the subunit a, the two b, and the twelve c subunits in Figure 1
belong to the F0-ATPase motor. In yeast, the F0 has only 10 c subunits (18). The
F0 ‘turbine’ from plant chloroplasts was found to have 14 c subunits (19), whereas
a Na+-driven specimen from bacteria was found to have 14 such subunits (20).
A flow of ions through the membrane propels the
observed reversible (21) rotation of F0-ATPase (22). As mentioned above, F0 is
the membrane-spanning unit of the ATPase motor. It remains embedded in the
mitochondrial or cellular membrane. In 1978, it was discovered that a chemical
potential gradient for protons is formed across the inner mitochondrial membrane
or the proton-motive force (8). This force is utilized by the ATPase enzyme to
produce ATP. The structure of F0-ATPase is not as well known as its F1 counterpart,
which has been fully resolved (18, 23–28). The mechanochemical and quantitative
models that explain how the ion-motive force is converted into the rotation of the
γ -subunit were described in (15, 29–33).
The first hybrid nanoassembly structures powered by F1-ATPase was proposed
in (34). Nano-fabricated Ni posts, about 80 nm in diameter and 200 nm in height,
each separated by about 2.5 µm were built. Upon these posts they attached specially
produced recombinant biotinylated F1-ATPases using histidine tags into their βsubunit coding sequences. A streptavidin molecule was bound to the γ -subunit,
and finally Ni propellers of lengths 750 to 1400 nm were attached to them. In
an action that is reverse of its ATP-producing cycle, the F1-ATPase consumed
externally provided ATP and produced anticlockwise rotation with a speed of
about eight rotations per second. To date, this achievement remains a landmark in
bio-nanotechnology.
FUNCTION: F0-ATPase MOTOR
The Kinesin, Myosin, Dynein, and Flagella Molecular Motors
With modern microscopic tools, we view a cell as a set of many different moving
components powered by molecular machines rather than a static environment.
Molecular motors that move unidirectionally along protein polymers (actin or
microtubules) drive the motions of muscles, as well as much smaller intracellular
cargoes. In addition to the F0-F1-ATPase motors inside the cell, there are linear
transport motors present, tiny vehicles known as motor proteins, that transport
molecular cargoes (35) and also require ATP for functioning. These minute cellular
machines exist in three families: kinesins, myosins, and dyneins (36). The cargoes
can be organelles, lipids, or proteins etc. They play an important role in cell division
and motility.
There are over 250 kinesin-like proteins, and they are involved in processes as
diverse as the movement of chromosomes and the dynamics of cell membranes. The
1 Apr 2004
20:30
AR
AR220-BE06-10.tex
AR220-BE06-10.sgm
LaTeX2e(2002/01/18)
P1: IKH
AR REVIEWS IN ADVANCE10.1146/annurev.bioeng.6.040803.140143
MOLECULAR MACHINES
10.7
only part they have in common is the catalytic portion known as the motor domain.
They have significant differences in their location within cells, their structural
organization, and the movement they generate (37). Muscle myosin, whose study
dates back to 1864, has served as a model system for understanding motility for
decades. Kinesin, however was not discovered until 1985, using in vitro motility
assays (38). Conventional kinesin is a highly processive motor that can take several
hundred steps on a microtubule without detaching (39, 40), whereas muscle myosin
executes a single stroke and then dissociates (41). Detailed analysis and modeling
of these motors has been done (38, 42).
Kinesin and myosin make for an interesting comparison. Kinesin is microtubule
based; it binds to and carries cargoes along microtubules, whereas myosin is actin
based. The motor domain of kinesin weighs one third that of myosin and one
tenth of that of dynein (43). Before the advent of modern microscopic and analytic
techniques, it was believed that these two had little in common. However, the
crystal structures available today indicate that they probably originated from a
common ancestor (44).
Myosin is a diverse superfamily of motor proteins
(45). Myosin-based molecular machines transport cargoes along actin filaments,
the two-stranded helical polymers of the protein actin that are about 5–9 nm in
diameter. They do this by hydrolyzing ATP and utilizing the released energy (46).
In addition to transport, they are also involved in the process of force generation during muscle contraction, wherein thin actin filaments and thick myosin
filaments slide past each other. Not all members of the myosin superfamily have
been characterized. However, much is known about their structure and function.
Myosin molecules were first seen (in the late 1950s) through electron microscope
protruding out from thick filaments and interacting with the thin actin filaments
(47–49). Since that time, ATP has been known to play a role in myosin-related
muscle movement along actin (50); however, the exact mechanism was unknown,
until it was explained in (51).
THE MYOSIN LINEAR MOTOR
Structure: myosin molecular motor A myosin molecule binding to an actin polymer is shown in Figure 4a (see color insert) (52). Myosin molecule has a size
of about 520 kDa, including two 220-kDa heavy chains and light chains of sizes
between 15–22 kDa (53, 54). They can be visualized as two identical globular
motor heads, also known as motor domains, each having a catalytic domain (actin,
nucleotide, and light chain binding sites) and ∼8 nm long lever arms. One of the
heads, sometimes referred to as S1 regions (subfragment 1), is shown in green
(only the active head is visible); the lever arms or the light chains, in red and yellow. Both heads are connected via a coiled coil made of two α-helical coils (green)
to the thick base filament. The light chains have considerable sequence similarity with the protein calmodulin and troponin C and are sometimes referred to as
calmodulin-like chains. They act as links to the motor domains and do not play
any role in their ATP binding activity (55) except for some exceptions (56, 57).
1 Apr 2004
20:30
10.8
AR
AR220-BE06-10.tex
MAVROIDIS
DUBEY
AR220-BE06-10.sgm
LaTeX2e(2002/01/18)
P1: IKH
AR REVIEWS IN ADVANCE10.1146/annurev.bioeng.6.040803.140143
YARMUSH
The motor domain in itself is sufficient for moving actin filaments (58). Threedimensional structures of a myosin head revealed that it is a pear-shaped domain,
about 19 nm long and 5 nm in maximum diameter (58, 59).
Function: myosin molecular motor A crossbridge-cycle model for the action of
myosin on actin has been widely accepted since 1957 (47, 60, 61). Since the time
the atomic structures of actin monomer (62, 63) and myosin (59) were resolved,
this model has been refined into a lever-arm model which is now acceptable (64).
Only one motor head is able to connect to the actin filament at a time, the other
head remains passive. Initially, the catalytic domain in the head has ADP and
Pi bound to it and, as a result, its binding with actin was weak. With the active
motor head docking properly to the actin-binding site, the Pi has to be released.
As soon as this happens, the lever arm swings counterclockwise (65) owing to
a conformational change (49, 66–71), which pushes the actin filament down by
about 10 nm along its longitudinal axis (38). The active motor head now releases
its bound ADP, and another ATP molecule, by way of Brownian motion, quickly
replaces it, making the binding of the head to the actin filament weak again. The
myosin motor then dissociates from the actin filament, and a new cycle starts.
However, nano-manipulation of single S1 molecules (motor domains) shows that
myosin can take multiple steps per ATP molecule hydrolyzed, moving in 5.3 nm
steps and resulting in displacements of 11 to 30 nm (72).
The kinesin (43) and dynein families of proteins
are involved in cellular cargo transport along microtubules, in contrast to myosin,
which transports along actin (73). Microtubules are 25-nm diameter tubes made of
protein tubulin and are present in the cells in an organized manner. Microtubules
have polarity; one end being the plus (fast-growing) end while the other end is the
minus (slow-growing) end (74). Kinesins move from the minus end to the plus
end of the microtubule, whereas dyneins move from the plus end to the minus
end. Microtubule arrangement varies in different cell systems. In nerve axons,
they are arranged longitudinally such that their plus ends point away from the
cell body and into the axon. In epithelial cells, their plus ends point toward the
basement membrane. They extend radially out of the cell center in fibroblasts
and macrophages with the plus end protruding outward (75). Similar to myosin,
kinesin is also an ATP-driven motor. One unique characteristic of the kinesin
family proteins is their processivity; they bind to microtubules and literally walk
on it for many enzymatic cycles before detaching (76, 77). Also, each of the
globular heads/motor domains of kinesin is made of a single polypeptide unlike
myosin (heavy and light chains and dynein heavy, intermediate, and light chains).
THE KINESIN LINEAR MOTOR
Structure: kinesin molecular motor Much structural information about kinesin
is now available through the crystal structures (44, 78, 79). The motor domain
contains a folding motif similar to that of myosin and G proteins (36). The two
heads or the motor domains of kinesin are linked via neck linkers to a long coiled
1 Apr 2004
20:30
AR
AR220-BE06-10.tex
AR220-BE06-10.sgm
LaTeX2e(2002/01/18)
P1: IKH
AR REVIEWS IN ADVANCE10.1146/annurev.bioeng.6.040803.140143
MOLECULAR MACHINES
10.9
coil, which extends up to the cargo (Figure 4b). These heads interact with the αand β-subunits of the tubulin hetrodimer along the microtubule protofilament. The
heads contain nucleotide- and microtubule-binding domains.
Function: kinesin molecular motor Although kinesin is also a two-headed linear
motor, its modus operandi is different from myosin in the sense that both of its
heads work together in a coordinated manner in contrast to one being left out in
the case of myosin. Figure 4b shows the kinesin walk. Each of the motor heads
is near the microtubule in the initial state, with each motor head carrying an ADP
molecule. When one of the heads loosely binds to the microtubule, it loses its
ADP molecule to facilitate a stronger binding. Another ATP molecule replaces
the ADP, which facilitates a conformational change such that the neck region
of the bound head snaps forward and zips on to the head (37). In the process, it
pulls the other ADP-carrying motor head forward by about 16 nm so that it can bind
to the next microtubule-binding site. This results in the net movement of the cargo
by about 8 nm (80). The second head now binds to the microtubule by losing its
ADP, which is promptly replaced by another ATP molecule (Brownian motion).
The first head, meanwhile hydrolyzes the ATP and loses the resulting Pi. It is
then snapped forward by the second head while it carries its ADP forward. Hence
coordinated hydrolysis of ATP in the two motor heads is the key to the kinesin
processivity (81, 82). Kinesin is able to take about 100 steps before detaching from
the microtubule (39, 76, 83), while moving at 1000 nm/s and exerting forces of
the order of 5–6 pN at rest (84, 85).
Dynein superfamily of proteins was introduced in 1965
(86). Dyneins exist in two isoforms: cytoplasmic and axonemal. Cytoplasmic
dyneins are involved in cargo movement, whereas axonemal dyneins are involved
in producing bending motions of cilia and flagella (87–97). Figure 5 shows a typical
cytoplasmic dynein molecule.
THE DYNEIN MOTOR
Structure: dynein molecular motor The structure consists of two heavy chains in
the form of globular heads, three intermediate chains, and four light intermediate
chains (98, 99). Recent studies have exposed a linker domain connecting the stem
region below the heads to the head itself (100). Also the microtubule-binding
domains ( the stalk region, not visible in the figure) protrude from the top of the
heads (101). The ends of these stalks have smaller ATP-sensitive globular domains
that bind to the microtubules. Cytoplasmic dynein is associated with a protein
complex known as dynactin, which contains 10 subunits (102). Some are shown
in the Figure 5 as p150, p135, actin-related protein 1 (Arp1), actin, dynamitin,
capping protein, and p62 subunit. These play an important regulatory role in the
binding ability of dynein to the microtubules. The heavy chains forming the two
globular heads contain the ATPase and microtubule motor domains (103).
One striking difference between dynein and the kinesins and myosins is that
dynein has AAA (ATPases associated with a variety of cellular activities) modules
1 Apr 2004
20:30
10.10
AR
AR220-BE06-10.tex
MAVROIDIS
DUBEY
AR220-BE06-10.sgm
LaTeX2e(2002/01/18)
P1: IKH
AR REVIEWS IN ADVANCE10.1146/annurev.bioeng.6.040803.140143
YARMUSH
Figure 5 A dynein molecule. Shown are the globular heads (heavy chains) connected
to the intermediate chains and the light chains. Dynactin complex components p150,
p135, dynamitin, p62, capping proteins, Arp1, Actin are also shown.
(104–106), which indicate that its mode of working will be entirely different from
kinesins and myosins. This puts dyneins into the AAA superfamily of mechanoenzymes. The dynein heavy chains contain six tandemly linked AAA modules (107,
108), with the head having a ring-like domain organization, which is typical of a
AAA superfamily. Four of these are nucleotide-binding motifs, named P1–P4, but
only P1 (AAA1) is able to hydrolyze ATP.
Function: dynein molecular motor Because dynein is a larger and more complex
structure than other motor proteins, its mode of operation is not as well known.
However, electron microscopy and image processing was used (100) to show the
structure of a flagellar dynein at the start and end of its power stroke, which gives
some insight into its possible mode of force generation. When the dynein contains
bound ADP and Vi (vandate), it is in the prepower stroke conformation. The state
1 Apr 2004
20:30
AR
AR220-BE06-10.tex
AR220-BE06-10.sgm
LaTeX2e(2002/01/18)
P1: IKH
AR REVIEWS IN ADVANCE10.1146/annurev.bioeng.6.040803.140143
MOLECULAR MACHINES
10.11
when it has lost the two, known as the apo-state, is the more compact postpower
stroke state. There is a distinct conformational change involving the stem, linker,
head, and the stalk that produces about 15 nm of translation onto the microtubule
bound to the stalk (100).
Unicellular organisms such as E. coli. have an interesting mode of motility (see 109–111). They have a number of molecular motors,
about 45 nm in diameter, that drive their feet or the flagella, which help the cell to
swim. Motility is critical for cells, as they often have to travel from a less favorable
to a more favorable environment. The flagella are helical filaments that extend out
of the cell into the medium and perform a function analogous to what the oars
perform to a boat. The flagella and the motor assembly are called a flagellum. The
motor assembly imparts a rotary motion into the flagella (112, 113). In addition
to a rotary mechanism, the flagellar machines consist of components such as rate
meters, particle counters, and gearboxes (114). These are necessary to help the cell
decide which way to go, depending on the change of concentration of nutrients in
the surroundings. The rotary motion imparted to the flagella needs to be modulated
to ensure the cell is moving in the proper direction, as well as to ensure that all
flagella of the given cell are providing a concerted effort toward it (115). When
the motors rotate the flagella in a counterclockwise direction, as viewed along the
flagella filament from outside, the helical flagella create a wave away from the cell
body. Adjacent flagella subsequently intertwine in a propulsive corkscrew manner
and propel the bacteria. When the motors rotate clockwise, the flagella fly apart,
causing the bacteria to tumble or change its direction (116). These reversals occur
irregularly, giving the bacterium a random walk, unless, of course, there is a preferential direction of motility due to reasons mentioned earlier. The flagella motors
allow the bacteria to move at speeds of as much as 25 µm/s, with directional reversals occurring approximately 1 per second (117). A number of bacterial species in
addition to E. coli. depend on flagella motors for motility: e.g., Salmonella enterica serovar, Typhimurium (Salmonella), Streptococcus, Vibrio spp., Caulobacter,
Leptospira, Aquaspirrilum serpens, and Bacillus. The rotation of flagella motors
is stimulated by a flow of ions through them, which is a result of a build-up of
a transmembrane ion gradient. There is no direct ATP-involvement; however, the
proton gradient needed for the functioning of flagella motors can be produced by
ATPase.
THE FLAGELLA MOTORS
Structure: the flagella motors A complete part list of the flagella motors is not yet
available. Continued efforts dating back to early 1970s have, however, revealed
much of their structure, composition, genetics, and function. Newer models of
the motor function are still being proposed with an aim to explain observed experimental phenomena (118, 119) because we still do not fully understand the
functioning of this motor (110). A typical flagella motor from E. coli. consists
of ∼20 different proteins (110), and many more are involved in its assembly
and operation. There are 14 Flg-type proteins, FlgA–FlgN; 5 Flh-type proteins,
1 Apr 2004
20:30
10.12
AR
AR220-BE06-10.tex
MAVROIDIS
DUBEY
AR220-BE06-10.sgm
LaTeX2e(2002/01/18)
P1: IKH
AR REVIEWS IN ADVANCE10.1146/annurev.bioeng.6.040803.140143
YARMUSH
Figure 6 A typical flagellum. A filament (FliC) is connected to the hook (FlgE),
which connects to the transmembrane motor unit through a shaft. Hook-related proteins
(FlgK, FlgL, and FliD) help in assembly and stability of the hook and filament. The
L-ring is embedded in the outer cell membrane, the P-ring in the peptidoglycan layer,
and the MS-ring (FliF) along with FliG (rotor) and parts of stator (MotA and MotB)
are embedded in the inner cell membrane. The C-ring and the transport apparatus are
located inside the cell.
FlhA–FlhE; 19 Fli-type proteins, FliA–FliT; with MotA and MotB making a total
of 40 related proteins. The group names Flg, Flh, Fli, and Mot correspond to the
related genes (120). Within the main structural proteins are other proteins: FliC
or the filament; FliD (filament cap); FliF or the MS-ring; FliG, FliM, and FliN
(C-ring); FlgB, FlgC, and FlgF (proximal rod); FlgG (distal rod); FlgH (L-ring);
FlgI (P-ring); FlgK and FlgL (hook-filament junction); and MotA-MotB (torquegenerating units) (see Figure 6). It was initially believed that the M and S were
two separate rings (M, membrane, S, supramembranous) (121). However, they
are now called the MS-ring because they were found to be two domains of the
same protein, FliF (122, 123). The C-ring stand for cytoplasmic (124–126); the
e names for the P and L-rings come from peptidoglycan and lipopolysaccharide,
respectively, indicating their location as seen in Figure 6. FlhA, B, FliH, I, O, P,
Q, and R constitute the transport apparatus.
The hook and filament part of the flagellum is located outside the cell body. The
motor portion is embedded in the cell membrane, with the C-ring and the transport
1 Apr 2004
20:30
AR
AR220-BE06-10.tex
AR220-BE06-10.sgm
LaTeX2e(2002/01/18)
P1: IKH
AR REVIEWS IN ADVANCE10.1146/annurev.bioeng.6.040803.140143
MOLECULAR MACHINES
10.13
apparatus inside the inner membrane in the cytoplasmic region. MotA and MotB
are arranged in a circular array embedded in the inner membrane, with the MS-ring
at the center. Connected to the MS-ring is the proximal end of a shaft, to which the
P-ring, embedded in the peptidoglycan layer, is attached. Moving further outward,
is the L-ring, which is embedded in the outer cell membrane, followed by the distal
shaft end that protrudes out of the cell. To this end there is an attachment of the
hook and the filament, both of which are polymers of hook-protein and flagellin
respectively.
Function: the flagella motors The flagellar motors in most cases are powered by
protons flowing through the cell membrane (proton-motive force) barring exceptions such as certain marine bacteria, for example, the Vibrio spp., which are driven
by Na+ ions (127). There are about 1200 protons required to rotate the motor by
one rotation (128). A complete explanation of how this proton flow is able to generate torque is not yet available. From what is known, the stator units of MotA
and MotB play an important role in torque generation. They form a MotA/MotB
complex that when oriented properly binds to the peptidoglycan and opens proton
channels through which protons can flow (129). It is believed that there are eight
such channels per motor (130). The proton-motive force is a result of the difference
of pH between the outside and inside of the cell. The E. coli. cells like to maintain an internal pH of 7.6–7.8, so depending on the pH of the surroundings, the
proton-motive force will vary, and hence the speed of rotation of their motors. To
test how the speed of rotation depends on the proton-motive force, the motors were
powered by external voltage with attached markers acting as heavy loads (131).
As expected, the rotation was found to depend directly on the proton-motive force.
According to the most widely accepted model, MotA/MotB complex interacts with
the rotor via binding sites. The passage of protons through a MotA/MotB complex
(stator or torque generator) moves it so that the protons bind to the next available
binding site on the rotor, thereby stretching their linkage. When the linkage recoils,
the rotor assembly has to rotate by one step. Hence whichever complex receives
protons from the flux will rotate the rotor and generate torque. The torque-speed
dependence of the motor has been studied in detail (132, 133) and indicates the
torque range of about 2700 to 4600 pN-nm.
DNA-BASED MOLECULAR MOTORS/DEVICES
As mentioned above, nature chose DNA mainly as an information carrier. There
was no mechanical work assigned to it. Energy conversion, trafficking, and sensing,
for example, were the tasks assigned mainly to proteins. Probably for this reason,
DNA turns out to be a simpler structure, with only four kinds of nucleotide bases,
adenosine, thiamine, guanine, and cytosine (A, T, G, and C), attached in a linear
fashion that takes a double-helical conformation when paired with a complementary strand. Such structural simplicity vis-à-vis proteins, made of some 20 amino
acids with complex folding patterns, results in a simpler structure and predictable
1 Apr 2004
20:30
10.14
AR
AR220-BE06-10.tex
MAVROIDIS
DUBEY
AR220-BE06-10.sgm
LaTeX2e(2002/01/18)
P1: IKH
AR REVIEWS IN ADVANCE10.1146/annurev.bioeng.6.040803.140143
YARMUSH
behavior. There are certain qualities that make DNA an attractive choice for the
construction of artificial nanomachines. In recent years, DNA has found use not
only in mechanochemical but also in nanoelectronic systems (134–137). A DNA
double-helical molecule is about 2 nm in diameter and has 3.4–3.6-nm helical pitch
no matter what its base composition is, a structural uniformity not achievable with
protein structures if one changes their sequence. Furthermore, double-stranded
DNA (ds-DNA) has a respectable persistence length of about 50 nm (138), which
provides it enough rigidity to be a candidate component of molecular machinery.
Single-stranded DNA (ss-DNA) is very flexible and cannot be used where rigidity
is required; however, this flexibility allows its application in machine components
such hinges or nanoactuators (139). Its persistence length is about 1 nm, covering
up to 3 base pairs (140) at 1M salt concentration.
Other than the above structural features, two important and exclusive properties
make DNA suitable for molecular level constructions: molecular recognition and
self-assembly. The nucleotide bases A and T on two different ss-DNA have affinity
for each other, so do G and C. Effective and stable ds-DNA structures are formed
only if the base orders of the individual strands are complementary. Hence, if
two complementary single strands of DNA are in a solution, they will eventually
recognize each other and hybridize or zip-up forming a ds-DNA. This property of
molecular recognition and self-assembly has been exploited in a number of ways
to build complex molecular structures (141–148). From a mechanical perspective,
if the free energy released by hybridization of two complementary DNA strands
is used to lift a hypothetical load, a force capacity of 15 pN can be achieved (F.C.
Simmel & B.Yurke, unpublished data), comparable to that of other molecular
machines such as kinesin (5 pN) (150).
The first artificial DNA-based structure in the form of a cube in 1991 was
presented in (143, 151). More complex structures such as knots (152, 153) and
Borromean rings (147) were also developed. In addition to these individual constructs, two-dimensional arrays (145, 154, 155) were made with the help of the
double-crossover (DX) DNA molecule (156–158). This DX molecule gave the
structural rigidity required to create a dynamic molecular device, the B-Z switch
(159). DNA double helices can be of three types: A-, B-, or Z-DNA. The B-DNA is
the natural, right-handed helical form of DNA, whereas the A-DNA is a shrunken,
low-humidity form of the B-DNA. Z-DNA, obtained from certain CG base repeat sequences occurring in B-DNA, can take a left-handed double helical form
(160). The CG-repeated base pair regions can be switched between the left and the
right-handed conformations by changing ionic concentration (161). The switch
was designed in such a way that it had three cyclic strands of DNA, two of them
wrapped around a central strand that had the CG repeat region in the middle. On
the two free ends of the side strands fluorescent dyes were attached in order to
monitor the conformational change. With the change in ionic concentration the
central CG repeat sequence could alternate between the B and the Z modes bidirectionally, which was observed through fluorescence resonance energy transfer
(FRET) spectroscopy.
1 Apr 2004
20:30
AR
AR220-BE06-10.tex
AR220-BE06-10.sgm
LaTeX2e(2002/01/18)
P1: IKH
AR REVIEWS IN ADVANCE10.1146/annurev.bioeng.6.040803.140143
MOLECULAR MACHINES
10.15
The DNA Tweezers
An artificial DNA-based molecular machine that also accepted DNA as a fuel was
recently developed (162). The machine, called DNA tweezers, consisted of three
strands of DNA labeled A, B and C. Strands B and C are partially hybridized on
to the central strand A with overhangs on both ends (Figure 7, see color insert).
This conformation of the machine is the open conformation. When F, an auxiliary
fuel strand F designed to hybridize with both overhang regions, is introduced,
the machine attains a closed conformation. The fuel strand is then removed from
the system by the introduction of its exact complement, leaving the system to
go back to its original open conformation. In this way a reversible motion is
produced, which can be observed by attaching fluorescent tags to the two ends of
the strand A. In this case the 5 end was labeled with the dye TET (tetrachlorofluorescein phosphoramidite), and the 3 end was labeled with TAMRA (carboxytertamethylrhodamine). Aside from the creation of a completely new molecular
machine, this showed a way of selective fueling of such machines. The fuel strands
are sequence specific, so they will work on only those machines toward which they
are directed and will not trigger other machines surrounding them.
This machine was later improved to form a three-state device (163), which had
two robust states and one flexible intermediate state. A variation of the tweezers
came about as the DNA-scissors (164).
Rotary DNA Actuator Concept
Based on the principle of branch migration and targeted fueling as achieved in
the DNA tweezers, a rotary machine element made of DX-DNA molecules was
introduced. This element was based on the reversible transition between two states,
the paranemic crossover (PX) (165) DNA, and its topoisomer, JX2 (Figure 8a, see
color insert).
The PX-DNA is known to play a role in recombination process. As seen in
Figure 8b, the PX-DNA is formed by red, blue, and green DNA strands. However,
the top and bottom double-helical regions of the red and blue strands are connected
to each other by a single-stranded region. These single-stranded regions are partially hybridized by green strands with overhangs that will act as ‘sticky ends’ to
adhere to incoming fuel strands. When exact complements of the green strands are
supplied (i), the green strands are displaced from the PX motif and bind with their
complements. This makes possible the addition of a different set of strands into the
gap. In stage ii, whenthe purple strands are added into the gap, the PX molecule
changes conformation to JX2 state with the lower double helices C and D rotating
by 180◦ . The purple strands can then be removed in a fashion similar to displacing
the green ones, and fresh green strands can be added to the remaining intermediate, which will result in another rotation such that the C and D portions come
back to their PX-positions. In a very smart complex molecular construction, the
researchers attached half-hexagonal DNA structures formed by DX and ds-DNA
onto one of the ds regions (red or blue, Figure 8) of PX motifs arranged in a linear
1 Apr 2004
20:30
10.16
AR
AR220-BE06-10.tex
MAVROIDIS
DUBEY
AR220-BE06-10.sgm
LaTeX2e(2002/01/18)
P1: IKH
AR REVIEWS IN ADVANCE10.1146/annurev.bioeng.6.040803.140143
YARMUSH
array (166). Because of the larger size of the structures, they could be visualized
using an atomic force microscope to prove that the rotary device indeed rotates. A
possible application of two DNA rotary machines to rotate a central disc is shown
in Figure 9 (see color insert).
INORGANIC (CHEMICAL) MOLECULAR MACHINES
In the past two decades, chemists have been able to create, modify, and control
numerous types of molecular machines. Many of these machines carry a striking resemblance to our everyday macroscale machines such as gears, propellers,
shuttles, etc. In addition, all of these molecular machines are easy to synthesize artificially and are generally more robust than the natural molecular machines. Most
of these machines are organic compounds of carbon, nitrogen, and hydrogen, with
the presence of a metal ion being required occasionally. Electrostatic interactions
and covalent and hydrogen bondingplay essential roles in the performance of these
machines. Such artificial chemical machines can be controlled in various ways—
chemically, electrochemically, and photochemically (through irradiation by light).
Some are even controlled in several ways, rendering them more flexible, which
enhances their utility. A scientist can have more freedom with respect to the design of chemical molecular machines depending on the performance requirements
and conditions. Rotaxanes (167–169) and catenanes (170, 171) make the basis of
many of the molecular machines described in this section. These are families of
interlocked organic molecular compounds with a distinctive shape and properties
that guide their performance and control.
The Rotaxanes
Rotaxane family of molecular machines is characterized by two parts: a dumbbellshaped compound with two heavy chemical groups at the ends and a light, cyclic
component, called a macrocycle, interlocked between the heads (Figure 10).
A reversible switch can be made with a rotaxane setup (172). For this, one needs
to have two chemically active recognition sites in the neck region of the dumbbell.
In this particular example, the thread was made of polyether, marked by recognition sites of hydroquinol units and terminated at the ends by large triisoproplylsilyl
groups. A tetracationic bead was designed and self-assembled into the system that
interacts with the recognition sites. The macrocycle has a natural, low-energy state
on the first recognition site, but can be switched reversibly between the two sites
upon application of suitable stimuli. Depending on the type of rotaxane setup,
the stimuli can be chemical, electrochemical, or photochemical (173, 174). The
stereo-electronic properties of the recognition sites can be altered by protonation
or deprotonation, or by oxidation or reduction, thereby changing the affinity of the
sites toward the macrocycle. In a recent example, light-induced acceleration of rotaxane motion was achieved by photoisomerization (175). Similar controls through
alternating current (oscillating electric fields) had previously been shown (176).
1 Apr 2004
20:30
AR
AR220-BE06-10.tex
AR220-BE06-10.sgm
LaTeX2e(2002/01/18)
P1: IKH
AR REVIEWS IN ADVANCE10.1146/annurev.bioeng.6.040803.140143
MOLECULAR MACHINES
10.17
Figure 10 A typical rotaxane shuttle setup. The macrocycle encircles the thread-like
portion of the dumbbell with heavy groups at its ends. The thread has two recognition
sites that can be altered reversibly so as to make the macrocycle shuttle between the
two sites.
There are various ways for making rotaxanes by supramolecular synthesis (177).
They can be self-assembled (178) using template-directed synthesis (179) methods
such as threading, clipping, and slippage (180–182). In addition, various other rotaxane shuttles and means of controlling the switching motion have been described
(183–192).
The Catenanes
The catenanes are also special type of interlocked structures that represent a growing family of molecular machines. They are synthesized by supramolecular assistance to molecular synthesis (177). The general structure of a catenane is that of
two interlocked ring-like components that are noncovalently linked via a mechanical bond, i.e., they are held together without any valence forces. Both macrocyclic
components have recognition sites composed of atoms or groups of atoms that are
redox active or photochemically reactive. It is possible to have both rings with similar recognition sites. In such a scenario, one of the rings may rotate inside the other
with the conformations stabilized by noncovalent interactions, but the two states of
the inner ring, differing by 180◦ , will be undistinguishable (degenerate) (193). For
better control and distinguishable molecular conformations, it is desirable to have
different recognition sites within the macrocycles. Then they can be controlled
independently through their own specific stimuli. The stereo-electronic property
of a recognition site within a macrocycle can be varied such that at one point it
has more affinity for the sites on the other ring. At this instant, the force balance
will guide the rotating macrocycle for a stable conformation, which requires that
particular site to be inside the other macrocycle. Similarly, with other stimuli, this
affinity can be turned off, or even reversed, along with an increase of the affinity of
1 Apr 2004
20:30
10.18
AR
AR220-BE06-10.tex
MAVROIDIS
DUBEY
AR220-BE06-10.sgm
LaTeX2e(2002/01/18)
P1: IKH
AR REVIEWS IN ADVANCE10.1146/annurev.bioeng.6.040803.140143
YARMUSH
Figure 11 A nondegenerate catenane. One of the rings (the moving ring) has two
different recognition sites in it. Both sites can be turned off or on with different stimuli.
When the trapezoidal-shaped site is activated, the force and energy balance results
in the first conformation, whereas when the disc-shaped site is activated, the second
conformation results. They can be called states 0 and 1, analogous to binary machine
language.
the second recognition site on the rotating macrocycle toward those on the static
one. There is a need for computational modeling, simulation, and analysis of such
molecular machine motion (194). Catenanes can also be designed for chemical,
photochemical, or electrochemical control (195–199). Figure 11 describes one
such catenane molecular motor.
For both rotaxane- and catenane-based molecular machines, it is desirable to
have recognition sites such that they can be easily controlled externally. Hence, it is
preferable to build sites that are either redox active or photo active (173). Catenanes
can also be self-assembled (200). An example of a catenane-assembled molecular
motor is the electronically controllable bistable switch (201). An intuitive way of
1 Apr 2004
20:30
AR
AR220-BE06-10.tex
AR220-BE06-10.sgm
LaTeX2e(2002/01/18)
P1: IKH
AR REVIEWS IN ADVANCE10.1146/annurev.bioeng.6.040803.140143
MOLECULAR MACHINES
10.19
looking at catenanes is to think of them as molecular equivalents of ball and socket
and universal joints (196, 202, 203).
Pseudorotaxanes are structures that contain a ring-like element and a thread-like
element that can be threaded or dethreaded onto the ring upon application of various stimuli. Again, the stimuli can be chemical, photochemical, or electrochemical
(204). These contain a promise of forming molecular machine components analogous to switches and nuts and bolts from the macroscopic world.
Other Inorganic Molecular Machines
Many other molecular devices reported in the past four decades bear a striking
resemblance to macroscopic machinery. Chemical compounds behaving as bevel
gears and propellers that were reported in the late 1960s and early 1970s are still
being studied today (205–208). A molecular propeller can be formed when two
bulky rings such as the aryl rings (209) are connected to one central atom, often
called the focal atom. Clockwise rotation of one such ring induces a counterclockwise rotation of the opposite ring about the bond connecting it to the central atom.
It is possible to have a three-propeller system as well (210–212). Triptycyl and
amide ring systems have been shown to observe a coordinated gear-like rotation
(213–217). “Molecular turnstiles,” which are rotating plates inside a macrocycle,
have been created (218, 219). However, such rotations are not controllable. A rotation of a molecular ring about a bond could be controlled by chemical stimuli,
as was shown for the case of a molecular brake (220). A propeller-like rotation
of a 9-triptycyl ring system, which was used in gears, this time connected to a
2,2 -bipyridine unit, could be controlled by the addition and subsequent removal
of a metal. Thus free rotations along single bonds can be stopped and released at
will. Soon after demonstrating the brake, A similar structure, called the molecular ratchet, was also proposed (221, 222). Again, the polycyclic structure was
allowed only one degree of rotational freedom about a single bond connecting triptycene and benzophenantherene (223). On similar lines and by the same group, a
chemically powered unidirectional rotary machine was introduced (224–226). The
demonstrations, as for most chemical machines, were done by 1H NMR techniques.
An additional type of molecular switch is the chiroptical molecular switch
(227). Another large cyclic compound was found to be switchable between its
two stable isomeric forms P and M (right- and left-handed) stimulated by light.
Depending on the frequency of the bombarded light, the cis and trans conformations of the compound 4-[9 (2 -meth-oxythioxanthylidene)]-7-methyl-1,2,3,4tetrahydrophenanthrene can be interconverted. Allowing a slight variation to this
switch, a striking molecular motor driven by light and/or heat was introduced in
(228). In contrast to the rotation around a single bond in the ratchet described above,
this rotation was achieved around a carbon-carbon double bond in a helical alkene.
Ultraviolet light or the change in temperature could trigger a rotation involving
four isomerization steps in the compound (3R,3 R)-(P,P)-trans-1,1 ,2,2 ,3,3 ,4,4 octahydro-3,3 -dimethyl-4,4 ,-biphenanthrylidene. A second-generation motor
1 Apr 2004
20:30
10.20
AR
AR220-BE06-10.tex
MAVROIDIS
DUBEY
AR220-BE06-10.sgm
LaTeX2e(2002/01/18)
P1: IKH
AR REVIEWS IN ADVANCE10.1146/annurev.bioeng.6.040803.140143
YARMUSH
along with eight other motors from the same material is now operational (229).
This redesigned motor has distinct upper and lower portions, and it operates at
a higher speed. It also provides a good example of how controlled motion at the
molecular level can be used to produce a macroscopic change in a system that
is visible to the naked eye. The light-driven motors when inside liquid crystal
(LC) films can produce a color change by inducing a reorganization of mesogenic
molecules (230).
OTHER PROTEIN-BASED MOTORS
UNDER DEVELOPMENT
In this section we present two protein-based motors that are at initial developmental
stages and yet possess some very original and interesting characteristics.
Viral Protein Linear Motors
The idea of viral protein linear motors (231) stems from the fact that a family of
retroviruses like the influenza virus (232) and HIV-1 (233) has a typical mechanism
of infecting a human cell. When such a virus comes near the cell, it is believed
that it experiences a drop in pH of its surroundings owing to the environment
surrounding the cell. This is a sort of signal to the virus that its future host is near.
The drop of pH changes the energetics of the outer (envelope glycoprotein) protein
of the viral membrane in such a way that there is a distinct conformational change
in a part of it (234, 235). A triple-stranded coiled coil domain of the membrane
protein changes conformation from a loose random structure to a distinctive αhelical conformation (236). It is proposed to isolate this domain from the virus
and trigger the conformational change by variation of pH in vitro. Once this is
realized, attachments can be added to the N or C (or both) terminals of the peptide,
and a reversible linear motion can be achieved. Figure 12 shows a triple-stranded
coiled coil structure at a pH of 7.0; the inverted hairpin-like coils shown in the
front view in Figure 12a and top view in Figure 12b change conformation into
extended helical coils as seen in Figure 12b.
Synthetic Contractile Polymers
In a recent development, large plant proteins that can change conformation when
stimulated by positively charged ions were separated from their natural environment and shown to exert forces in orthogonal directions (237, 238). Proteins from
sieve elements of higher plants that are a part of the microfluidics system of the
plant were chosen to build a new protein molecular machine element. These elements change conformations in the presence of Ca2+ ions and organize themselves
inside the tubes to stop the fluid flow in case there is a rupture downstream. This
is a natural defense mechanism seen in such plants. The change in conformation
1 Apr 2004
20:30
AR
AR220-BE06-10.tex
AR220-BE06-10.sgm
LaTeX2e(2002/01/18)
P1: IKH
AR REVIEWS IN ADVANCE10.1146/annurev.bioeng.6.040803.140143
MOLECULAR MACHINES
10.21
is akin to a balloon inflating and extending in its lateral as well as longitudinal
directions. These elements, designated as forisomes, adhered to glass tubes, were
shown to reversibly swell in the presence of Ca2+ ions and shrink in their absence, hence performing a pulling/pushing action in both directions. Artificially
prepared protein bodies such as the forisomes could be a useful molecular machine
component in a future molecular assembly, producing forces of the order of micronewtons (237). Unlike the ATP-dependant motors discussed previously, these
machine elements are more robust because they can perform well in the absence
of their natural environment.
CONCLUSIONS
The recent explosion of research in nano-technology, combined with important discoveries in molecular biology, has created a new interest in biomolecular machines
and robots. The main goal in the field of biomolecular machines is to use various
biological elements—whose function at the cellular level creates a motion, force
or a signal—as machine components that perform the same function in response
to the same biological stimuli but in an artificial setting. In this way, proteins and
DNA could act as motors, mechanical joints, transmission elements, or sensors. If
all these components were assembled together they could form nanodevices with
Figure 12 (a) VPL motor at neutral pH. Front view of the partially α-helical triple
stranded coiled coil. VPL motor is in the closed conformation. (b) VPL Motor in the
open conformation at acidic pH. The random coil regions are converted into welldefined helices and an extension occurs at lower pH.
1 Apr 2004
20:30
10.22
AR
AR220-BE06-10.tex
MAVROIDIS
DUBEY
Figure 12
AR220-BE06-10.sgm
LaTeX2e(2002/01/18)
P1: IKH
AR REVIEWS IN ADVANCE10.1146/annurev.bioeng.6.040803.140143
YARMUSH
(Continued)
1 Apr 2004
20:30
AR
AR220-BE06-10.tex
AR220-BE06-10.sgm
LaTeX2e(2002/01/18)
P1: IKH
AR REVIEWS IN ADVANCE10.1146/annurev.bioeng.6.040803.140143
MOLECULAR MACHINES
10.23
multiple degrees of freedom, able to apply forces and manipulate objects in the
nanoscale world, transfer information from the nano- to the macroscale world, and
even travel in a nanoscale environment.
The future of molecular machinery is bright. We are at the dawn of a new era
in which many disciplines will merge, including robotics, mechanical, chemical,
and biomedical engineering, chemistry, biology, physics, and mathematics, so that
fully functional systems will be developed. However, challenges toward such a
goal abound. Developing a complete database of different biomolecular machine
components and the ability to interface or assemble different machine components
are some of the challenges to be faced in the near future. The problems involved
in controlling and coordinating several biomolecular machines will come next.
ACKNOWLEDGMENTS
This work was supported by the National Science Foundation (DMI-02,28103
and DMI-03,03950). Any opinions, findings, conclusions, or recommendations
expressed in this publication are those of the authors and do not necessarily reflect
the views of the National Science Foundation. The authors thank Kevin Nikitczuk
of the Department of Biomedical Engineering at Rutgers University for providing
assistance in the creation of the graphics for this paper.
The Annual Review of Biomedical Engineering is online at
http://bioeng.annualreviews.org
LITERATURE CITED
1. Oster G. 2003. How protein motors
convert chemical energy into mechanical work. In Molecular Motors, ed. M
Schliwa, pp. 207–28. New York: Wiley
2. Boyer PD. 1998. Energy, life, and ATP.
Biosci. Rep. 18:97–117
3. Lipmann F. 1941. Metabolic generation
and utilization of phosphate bond energy.
Adv. Enzymol. 1:99
4. Yasuda R, Noji H, Kinosita K Jr, Yoshida
M. 1998. F1-ATPase is a highly efficient
molecular motor that rotates with discrete
120 degree steps. Cell 93:1117–24
5. Fernandez-Moran H. 1962. Molecular organization of cell membranes. Circulation
26:1039–65
6. Kagawa Y, Racker E. 1966. Partial resolution of the enzymes catalyzing oxidative phosphorylation. J. Biol. Chem.
241:2475–82
7. Oster G, Wang H. 1999. ATP synthase:
two motors, two fuels. Struct. Fold Des. 7:
R67–72
8. Mitchell P. 1979. Keilin’s respiratory
chain concept and its chemiosmotic consequences. Science 206:1148–59
9. Dimroth P. 1991. Na+-coupled alternative
to H+-coupled primary transport systems
in bacteria. BioEssays 13:463–68
10. Knowles AF, Penefsky HS. 1972. The
subunit structure of beef heart mitochondrial adenosine triphosphatase. Physical
and chemical properties of isolated subunits. J. Biol. Chem. 247:6624–30
11. Boyer PD, Cross RL, Momsen W. 1973.
A new concept for energy coupling in oxidative phosphorylation based on a molecular explanation of the oxygen exchange
reactions. Proc. Natl. Acad. Sci. USA 70:
2837–39
1 Apr 2004
20:30
10.24
AR
AR220-BE06-10.tex
MAVROIDIS
DUBEY
AR220-BE06-10.sgm
LaTeX2e(2002/01/18)
P1: IKH
AR REVIEWS IN ADVANCE10.1146/annurev.bioeng.6.040803.140143
YARMUSH
12. Walker JE. 1998. ATP Synthesis by rotary
catalysis (Nobel Lecture). Angew. Chem.
Int. Ed. 37:2308–19
13. Noji H, Yasuda R, Yoshida M, Kinosita K
Jr. 1997. Direct observation of the rotation
of F1-ATPase. Nature 386:299–302
14. Jones PC, Fillingame RH. 1998. Genetic
fusions of subunit c in the F0 sector
of H+-transporting ATP synthase. Functional dimers and trimers and determination of stoichiometry by cross-linking
analysis. J. Biol. Chem. 273:29701–5
15. Dimroth P, Wang H, Grabe M, Oster G.
1999. Energy transduction in the sodium
F-ATPase of Propionigenium modestum.
Proc. Natl. Acad. Sci. USA 96:4924–29
16. Sambongi Y, Iko Y, Tanabe M, Omote H,
Iwamoto-Kihara A, et al. 1999. Mechanical rotation of the c subunit oligomer in
ATP synthase (F0F1): direct observation.
Science 286:1722–24
17. Rastogi VK, Girvin ME. 1999. Structural
changes linked to proton translocation by
subunit c of the ATP synthase. Nature 402:
263–68
18. Stock D, Leslie AG, Walker JE. 1999.
Molecular architecture of the rotary motor
in ATP synthase. Science 286:1700–5
19. Seelert H, Poetsch A, Dencher NA, Engel
A, Stahlberg H, Muller DJ. 2000. Structural biology. Proton-powered turbine of
a plant motor. Nature 405:418–19
20. Stahlberg H, Muller DJ, Suda K, Fotiadis
D, Engel A, et al. 2001. Bacterial Na+ATP synthase has an undecameric rotor.
EMBO Rep. 2:229–33
21. Fillingame RH. 1990. Molecular mechanics of ATP synthesis in F1 F0-type
H +-transporting ATP synthases. Bacteria
12:345–91
22. Wang H, Oster G. 1998. Energy transduction in the F1 motor of ATP synthase. Nature 396:279–82
23. Abrahams JP, Leslie AG, Lutter R, Walker
JE. 1994. Structure at 2.8 Å resolution of
F1-ATPase from bovine heart mitochondria. Nature 370:621–28
24. Shirakihara Y, Leslie AG, Abrahams JP,
25.
26.
27.
28.
29.
30.
31.
32.
33.
34.
35.
Walker JE, Ueda T, et al. 1997. The crystal structure of the nucleotide-free alpha 3
beta 3 subcomplex of F1-ATPase from the
thermophilic Bacillus PS3 is a symmetric
trimer. Structure 5:825–36
Bianchet MA, Hullihen J, Pedersen PL,
Amzel LM. 1998. The 2.8-Å structure
of rat liver F1-ATPase: configuration of
a critical intermediate in ATP synthesis/hydrolysis. Proc. Natl. Acad. Sci. USA
95:11065–70
Menz RI, Walker JE, Leslie AG. 2001.
Structure of bovine mitochondrial F1ATPase with nucleotide bound to all three
catalytic sites: implications for the mechanism of rotary catalysis. Cell 106:331–
41
Groth G. 2002. Structure of spinach
chloroplast F1-ATPase complexed with
the phytopathogenic inhibitor tentoxin.
Proc. Natl. Acad. Sci. USA 99:3464–68
Rodgers AJ, Wilce MC. 2000. Structure of
the gamma-epsilon complex of ATP synthase. Nat. Struct. Biol. 7:1051–54
Dimroth P, Kaim G, Matthey U. 2000.
Crucial role of the membrane potential for
ATP synthesis by F1F0 ATP synthases. J.
Exp. Biol. 203 Pt 1:51–59
Oster G, Wang H, Grabe M. 2000. How
Fo-ATPase generates rotary torque. Philos. Trans. R. Soc. London Ser. B. 355:
523–28
Dimroth P. 2000. Operation of the F0 motor of the ATP synthase. Biochim. Biophys. Acta 1458:374–86
Grabe M, Wang H, Oster G. 2000. The
mechanochemistry of V-ATPase proton
pumps. Biophys. J. 78:2798–813
Oster G, Wang H. 2000. Reverse engineering a protein: the mechanochemistry
of ATP synthase. Biochim. Biophys. Acta
1458:482–510
Soong RK, Bachand GD, Neves HP,
Olkhovets AG, Craighead HG, Montemagno CD. 2000. Powering an inorganic
nanodevice with a biomolecular motor.
Science 290:1555–58
Howard J. 1997. Molecular motors:
1 Apr 2004
20:30
AR
AR220-BE06-10.tex
AR220-BE06-10.sgm
LaTeX2e(2002/01/18)
P1: IKH
AR REVIEWS IN ADVANCE10.1146/annurev.bioeng.6.040803.140143
MOLECULAR MACHINES
36.
37.
38.
39.
40.
41.
42.
43.
44.
45.
46.
47.
48.
49.
structural adaptations to cellular functions. Nature 389:561–67
Vale R. 1996. Switches, latches, and amplifiers: common themes of G proteins and
molecular motors. J. Cell Biol. 135:291–
302
Farrell CM, Mackey AT, Klumpp LM,
Gilbert SP. 2002. The role of ATP hydrolysis for kinesin processivity. J. Biol. Chem.
277:17079–87
Vale RD, Milligan RA. 2000. The way
things move: looking under the hood of
molecular motor proteins. Science 288:
88–95
Block SM, Goldstein LS, Schnapp BJ.
1990. Bead movement by single kinesin
molecules studied with optical tweezers.
Nature 348:348–52
Howard J, Hudspeth AJ, Vale RD. 1989.
Movement of microtubules by single kinesin molecules. Nature 342:154–58
Finer JT, Simmons RM, Spudich JA.
1994. Single myosin molecule mechanics:
piconewton forces and nanometre steps.
Nature 368:113–19
Hackney DD. 1996. The kinetic cycles of
myosin, kinesin, and dynein. Annu. Rev.
Physiol. 58:731–50
Block SM. 1998. Kinesin, what gives?
Cell 93:5–8
Kull FJ, Sablin EP, Lau R, Fletterick RJ,
Vale RD. 1996. Crystal structure of the
kinesin motor domain reveals a structural
similarity to myosin. Nature 380:550–55
Sellers JR. 2000. Myosins: a diverse superfamily. Biochim. Biophys. Acta BBA
1496:3–22
Howard J. 1994. Molecular motors.
Clamping down on myosin. Nature 368:
98–99
Huxley HE. 1957. The double array of filaments in cross-striated muscle. J. Biophys. Biochem. Cytol. 3:631–48
Huxley HE. 1953. Electron microscope
studies of the organisation of the filaments
in striated muscle. Biochim. Biophys. Acta
12:387–94
Hanson JHHE. 1953. Structural basis
50.
51.
52.
53.
54.
55.
56.
57.
58.
59.
60.
61.
62.
10.25
of the cross-striations in muscle. Nature
153:530–32
Huxley HE. 1969. The mechanism of
muscular contraction. Science 164:1356–
65
Lymn RW, Taylor EW. 1971. Mechanism
of adenosine triphosphate hydrolysis by
actomyosin. Biochemistry 10:4617–24
For videos of myosin and kinesin
movement visit http://sciencemag.org/
feature/data/1049155.shl.
Lowey S, Slayter HS, Weeds AG, Baker
H. 1969. Substructure of the myosin
molecule. I. Subfragments of myosin by
enzymic degradation. J. Mol. Biol. 42:1–
29
Weeds AG, Lowey S. 1971. Substructure of the myosin molecule. II. The light
chains of myosin. J. Mol. Biol. 61:701–
25
Wagner PD, Giniger E. 1981. Hydrolysis
of ATP and reversible binding to F-actin
by myosin heavy chains free of all light
chains. Nature 292:560–62
Citi S, Kendrick-Jones J. 1987. Regulation of non-muscle myosin structure and
function. BioEssays 7:155–59
Sellers JR. 1991. Regulation of cytoplasmic and smooth muscle myosin. Curr.
Opin. Cell Biol. 3:98–104
Schroder RR, Manstein DJ, Jahn W,
Holden H, Rayment I, et al. 1993. Threedimensional atomic model of F-actin decorated with Dictyostelium myosin S1.
Nature 364:171–74
Rayment I, Rypniewski WR, SchmidtBase K, Smith R, Tomchick DR, et al.
1993. Three-dimensional structure of
myosin subfragment-1: a molecular motor. Science 261:50–58
Huxley AF. 2000. Cross-bridge action:
present views, prospects, and unknowns.
J. Biomech. 33:1189–95
Huxley AF, Simmons RM. 1971. Proposed mechanism of force generation in
striated muscle. Nature 233:533–38
Kabsch W, Mannherz HG, Suck D, Pai EF,
Holmes KC. 1990. Atomic structure of the
1 Apr 2004
20:30
10.26
63.
64.
65.
66.
67.
68.
69.
70.
71.
72.
AR
AR220-BE06-10.tex
MAVROIDIS
DUBEY
AR220-BE06-10.sgm
LaTeX2e(2002/01/18)
P1: IKH
AR REVIEWS IN ADVANCE10.1146/annurev.bioeng.6.040803.140143
YARMUSH
actin:DNase I complex. Nature 347:37–
44
Holmes KC, Popp D, Gebhard W, Kabsch W. 1990. Atomic model of the actin
filament. Nature 347:44–49
Spudich JA. 1994. How molecular motors
work. Nature 372:515–18
Baker JE, Brust-Mascher I, Ramachandran S, LaConte LE, Thomas DD. 1998. A
large and distinct rotation of the myosin
light chain domain occurs upon muscle
contraction. Proc. Natl. Acad. Sci. USA
95:2944–49
Houdusse A, Kalabokis VN, Himmel
D, Szent-Gyorgyi AG, Cohen C. 1999.
Atomic structure of scallop myosin subfragment S1 complexed with MgADP: a
novel conformation of the myosin head.
Cell 97:459–70
Jontes JD, Wilson-Kubalek EM, Milligan
RA. 1995. A 32 degree tail swing in brush
border myosin I on ADP release. Nature
378:751–53
Veigel C, Coluccio LM, Jontes JD, Sparrow JC, Milligan RA, Molloy JE. 1999.
The motor protein myosin-I produces
its working stroke in two steps. Nature
398:530–33
Corrie JE, Brandmeier BD, Ferguson RE,
Trentham DR, Kendrick-Jones J, et al.
1999. Dynamic measurement of myosin
light-chain-domain tilt and twist in muscle contraction. Nature 400:425–30
Irving M, St Claire Allen T, Sabido-David
C, Craik JS, Brandmeier B, et al. 1995.
Tilting of the light-chain region of myosin
during step length changes and active
force generation in skeletal muscle. Nature 375:688–91
Forkey JN, Quinlan ME, Shaw MA,
Corrie JE, Goldman YE. 2003. Threedimensional structural dynamics of
myosin V by single-molecule fluorescence polarization. Nature 422:399–404
Kitamura K, Tokunaga M, Iwane AH,
Yanagida T. 1999. A single myosin head
moves along an actin filament with regular
steps of ∼5.3 nm. Nature 397:129–34
73. Howard J. 1996. The movement of kinesin
along microtubules. Annu. Rev. Physiol.
58:703–29
74. Howard J, Hyman AA. 2003. Dynamics
and mechanics of the microtubule plus
end. Nature 422:753–58
75. Hirokawa N. 1998. Kinesin and dynein
superfamily proteins and the mechanism
of organelle transport. Science 279:519–
26
76. Vale RD, Funatsu T, Pierce DW,
Romberg L, Harada Y, Yanagida T.
1996. Direct observation of single kinesin
molecules moving along microtubules.
Nature 380:451–53
77. Berliner E, Young EC, Anderson K,
Mahtani HK, Gelles J. 1995. Failure of
a single-headed kinesin to track parallel to microtubule protofilaments. Nature
373:718–21
78. Sablin EP, Kull FJ, Cooke R, Vale RD,
Fletterick RJ. 1996. Crystal structure of
the motor domain of the kinesin-related
motor ncd. Nature 380:555–59
79. Sack S, Muller J, Marx A, Thormahlen
M, Mandelkow EM, et al. 1997. X-ray
structure of motor and neck domains from
rat brain kinesin. Biochemistry 36:16155–
65
80. Schnitzer MJ, Block SM. 1997. Kinesin
hydrolyses one ATP per 8-nm step. Nature 388:386–90
81. Peskin CS, Oster G. 1995. Coordinated
hydrolysis explains the mechanical behavior of kinesin. Biophys. J. 68:202–11
82. Lohman TM, Thorn K, Vale RD. 1998.
Staying on track: common features of
DNA helicases and microtubule motors.
Cell 93:9–12
83. Hackney DD. 1995. Highly processive
microtubule-stimulated ATP hydrolysis
by dimeric kinesin head domains. Nature
377:448–50
84. Hunt AJ, Gittes F, Howard J. 1994.
The force exerted by a single kinesin
molecule against a viscous load. Biophys.
J. 67:766–81
85. Svoboda K, Block SM. 1994. Force
1 Apr 2004
20:30
AR
AR220-BE06-10.tex
AR220-BE06-10.sgm
LaTeX2e(2002/01/18)
P1: IKH
AR REVIEWS IN ADVANCE10.1146/annurev.bioeng.6.040803.140143
MOLECULAR MACHINES
86.
87.
88.
89.
90.
91.
92.
93.
94.
95.
and velocity measured for single kinesin
molecules. Cell 77:773–84
Gibbons IR, Rowe AJ. 1965. Dynein: a
protein with adenosine triphosphate activity from cilia. Science 149:424–26
Schroer TA, Steuer ER, Sheetz MP.
1989. Cytoplasmic dynein is a minus
end-directed motor for membranous organelles. Cell 56:937–46
Schnapp BJ, Reese TS. 1989. Dynein is
the motor for retrograde axonal transport
of organelles. Proc. Natl. Acad. Sci. USA
86:1548–52
Lye RJ, Porter ME, Scholey JM, McIntosh
JR. 1987. Identification of a microtubulebased cytoplasmic motor in the nematode
C. elegans. Cell 51:309–18
Paschal BM, Shpetner HS, Vallee RB.
1987. MAP 1C is a microtubule-activated
ATPase which translocates microtubules
in vitro and has dynein-like properties. J.
Cell Biol. 105:1273–82
Hirokawa N, Sato-Yoshitake R, Yoshida
T, Kawashima T. 1990. Brain dynein
(MAP1C) localizes on both anterogradely
and retrogradely transported membranous
organelles in vivo. J. Cell Biol. 111:1027–
37
Waterman-Storer CM, Karki SB,
Kuznetsov SA, Tabb JS, Weiss DG, et al.
1997. The interaction between cytoplasmic dynein and dynactin is required for
fast axonal transport. Proc. Natl. Acad.
Sci. USA 94:12180–85
Lin SX, Collins CA. 1992. Immunolocalization of cytoplasmic dynein to lysosomes in cultured cells. J. Cell Sci. 101
(Pt 1):125–37
Corthesy-Theulaz I, Pauloin A, Rfeffer
SR. 1992. Cytoplasmic dynein participates in the centrosomal localization of
the Golgi complex. J. Cell Biol. 118:
1333–45
Aniento F, Emans N, Griffiths G, Gruenberg J. 1993. Cytoplasmic dyneindependent vesicular transport from early
to late endosomes. J. Cell Biol. 123:1373–
87
10.27
96. Fath KR, Trimbur GM, Burgess DR. 1994.
Molecular motors are differentially distributed on Golgi membranes from polarized epithelial cells. J. Cell Biol. 126:661–
75
97. Blocker A, Severin FF, Burkhardt JK,
Bingham JB, Yu H, et al. 1997. Molecular requirements for bi-directional movement of phagosomes along microtubules.
J. Cell Biol. 137:113–29
98. King SJ, Bonilla M, Rodgers ME, Schroer
TA. 2002. Subunit organization in cytoplasmic dynein subcomplexes. Protein
Sci. 11:1239–50
99. King SM. 2000. The dynein microtubule
motor. Biochim. Biophys. Acta 1496:60–
75
100. Burgess S, Walker ML, Sakakibara H,
Knight PJ, Oiwa K. 2003. Dynein structure and power stroke. Nature 421:715–18
101. Koonce MP. 1997. Identification of a
microtubule-binding domain in a cytoplasmic dynein heavy chain. J. Biol.
Chem. 272:19714–18
102. Gill S, Schroer T, Szilak I, Steuer E,
Sheetz M, Cleveland D. 1991. Dynactin,
a conserved, ubiquitously expressed component of an activator of vesicle motility
mediated by cytoplasmic dynein. J. Cell
Biol. 115:1639–50
103. Straube A, Enard W, Berner A, WedlichSoldner R, Kahmann R, Steinberg G.
2001. A split motor domain in a cytoplasmic dynein. EMBO J. 20:5091–100
104. Vale RD. 2000. AAA proteins: lords of
the ring. J. Cell Biol. 150:13F–20
105. Neuwald AF, Aravind L, Spouge JL,
Koonin EV. 1999. AAA+: a class of
chaperone-like ATPases associated with
the assembly, operation, and disassembly
of protein complexes. Genome Res. 9:27–
43
106. Confalonieri F, Duguet M. 1995. A 200amino acid ATPase module in search of a
basic function. BioEssays 17:639–50
107. King SM. 2000. AAA domains and organization of the dynein motor unit. J. Cell
Sci. 113(Pt 14):2521–26
1 Apr 2004
20:30
10.28
AR
AR220-BE06-10.tex
MAVROIDIS
DUBEY
AR220-BE06-10.sgm
LaTeX2e(2002/01/18)
P1: IKH
AR REVIEWS IN ADVANCE10.1146/annurev.bioeng.6.040803.140143
YARMUSH
108. Asai DJ, Koonce MP. 2001. The dynein
heavy chain: structure, mechanics and
evolution. Trends Cell Biol. 11:196–202
109. Berry RM, Armitage JP. 1999. The bacterial flagella motor. Adv. Microb. Physiol.
41:291–337
110. Berg HC. 2003. The rotary motor of bacterial flagella. Annu. Rev. Biochem. 72:19–
54
111. Blair DF. 1995. How bacteria sense and
swim. Annu. Rev. Microbiol. 49:489–522
112. Berg HC, Anderson RA. 1973. Bacteria
swim by rotating their flagellar filaments.
Nature 245:380–82
113. Fahrner KA, Ryu WS, Berg HC. 2003.
Biomechanics: bacterial flagellar switching under load. Nature 423:938
114. Berg HC. 2000. Motile behavior of bacteria. Phys. Today 53:24–29
115. Scharf BE, Fahrner KA, Turner L, Berg
HC. 1998. Control of direction of flagellar rotation in bacterial chemotaxis. Proc.
Natl. Acad. Sci. USA 95:201–6
116. Macnab RM. 1977. Bacterial flagella rotating in bundles: a study in helical geometry. Proc. Natl. Acad. Sci. USA 74:221–25
117. Elston TC, Oster G. 1997. Protein turbines. I: the bacterial flagellar motor. Biophys. J. 73:703–21
118. Walz D, Caplan SR. 2000. An electrostatic
mechanism closely reproducing observed
behavior in the bacterial flagellar motor.
Biophys. J. 78:626–51
119. Schmitt R. 2003. Helix rotation model
of the flagellar rotary motor. Biophys. J.
85:843–52
120. Iino T, Komeda Y, Kutsukake K, Macnab RM, Matsumura P, et al. 1988. New
unified nomenclature for the flagellar
genes of Escherichia coli and Salmonella
typhimurium. Microbiol. Rev. 52:533–
35
121. Berg HC. 1974. Dynamic properties of
bacterial flagellar motors. Nature 249:77–
79
122. Ueno T, Oosawa K, Aizawa S. 1992. M
ring, S ring and proximal rod of the flagellar basal body of Salmonella typhimurium
123.
124.
125.
126.
127.
128.
129.
130.
131.
132.
133.
134.
135.
are composed of subunits of a single protein, FliF. J. Mol. Biol. 227:672–77
Ueno T, Oosawa K, Aizawa S. 1994. Domain structures of the MS ring component
protein (FliF) of the flagellar basal body
of Salmonella typhimurium. J. Mol. Biol.
236:546–55
Driks A, DeRosier DJ. 1990. Additional
structures associated with bacterial flagellar basal body. J. Mol. Biol. 211:669–72
Khan IH, Reese TS, Khan S. 1992. The
cytoplasmic component of the bacterial
flagellar motor. Proc. Natl. Acad. Sci. USA
89:5956–60
Francis NR, Sosinsky GE, Thomas D,
DeRosier DJ. 1994. Isolation, characterization and structure of bacterial flagellar
motors containing the switch complex. J.
Mol. Biol. 235:1261–70
Yorimitsu T, Homma M. 2001. Na+driven flagellar motor of Vibrio. Biochim.
Biophys. Acta BBA 1505:82–93
Meister M, Lowe G, Berg HC. 1987. The
proton flux through the bacterial flagellar
motor. Cell 49:643–50
Van Way SM, Hosking ER, Braun TF,
Manson MD. 2000. Mot protein assembly into the bacterial flagellum: a model
based on mutational analysis of the motB
gene. J. Mol. Biol. 297:7–24
Blair DF, Berg HC. 1988. Restoration of
torque in defective flagellar motors. Science 242:1678–81
Fung DC, Berg HC. 1995. Powering the
flagellar motor of Escherichia coli with an
external voltage source. Nature 375:809–
12
Berg H, Turner L. 1993. Torque generated
by the flagellar motor of Escherichia coli.
Biophys. J. 65:2201–16
Chen X, Berg HC. 2000. Torque-speed relationship of the flagellar rotary motor of
Escherichia coli. Biophys. J. 78:1036–41
Seeman NC. 2003. DNA in a material
world. Nature 421:427–31
Dekker C, Ratner M. 2001. Electronic
properties of DNA. Phys. World August:
29–33
1 Apr 2004
20:30
AR
AR220-BE06-10.tex
AR220-BE06-10.sgm
LaTeX2e(2002/01/18)
P1: IKH
AR REVIEWS IN ADVANCE10.1146/annurev.bioeng.6.040803.140143
MOLECULAR MACHINES
136. Robinson BH, Seeman NC. 1987. The
design of a biochip: a self-assembling
molecular-scale memory device. Protein
Eng. 1:295–300
137. Seeman NC, Belcher AM. 2002. Emulating biology: building nanostructures from
the bottom up. Proc. Natl. Acad. Sci. USA
99:6451–55
138. Smith SB, Cui Y, Bustamante C. 1996.
Overstretching B-DNA: the elastic response of individual double-stranded and
single-stranded DNA molecules. Science
271:795–99
139. Simmel FC, Yurke B. 2001. Using DNA to
construct and power a nanoactuator. Phys.
Rev. E. 63:041913
140. Tinland B, Pluen A, Sturm J, Weill G.
1997. Persistence length of singlestranded DNA. Macromolecules 30:
5763–65
141. Seeman NC. 1997. DNA components for
molecular architecture. Acc. Chem. Res.
30:347–91
142. Niemeyer CM. 1999. Progress in “engineering up” nanotechnology devices utilizing DNA as a construction material.
Appl.Phys. A 68:119–24
143. Chen JH, Seeman NC. 1991. Synthesis
from DNA of a molecule with the connectivity of a cube. Nature 350:631–33
144. Zhang Y, Seeman NC. 1994. Construction
of a DNA-truncated octahedron. J. Am.
Chem. Soc. 116:1661–69
145. Winfree E, Liu F, Wenzler LA, Seeman
NC. 1998. Design and self-assembly of
two-dimensional DNA crystals. Nature
394:539–44
146. Yan H, Zhang X, Shen Z, Seeman NC.
2002. A robust DNA mechanical device
controlled by hybridization topology. Nature 415:62–65
147. Mao C, Sun W, Seeman NC. 1997. Assembly of Borromean rings from DNA.
Nature 386:137–38
148. Mao C, LaBean TH, Relf JH, Seeman
NC. 2000. Logical computation using algorithmic self-assembly of DNA triplecrossover molecules. Nature 407:493–96
10.29
149. Deleted in proof
150. Coppin CM, Pierce DW, Hsu L, Vale RD.
1997. The load dependence of kinesin’s
mechanical cycle. Proc. Natl. Acad. Sci.
USA 94:8539–44
151. Seeman NC. 1991. Construction of threedimensional stick figures from branched
DNA. DNA Cell Biol. 10:475–86
152. Wang H, Du SM, Seeman NC. 1993. Tight
single-stranded DNA knots. J. Biomol.
Struct. Dyn. 10:853–63
153. Seeman NC. 1998. Nucleic acid nanostructures and topology. Angew. Chem. Int.
Ed. 37:3220–38
154. Mao C, Sun W, Seeman NC. 1999. Designed two-dimensional DNA Holliday
junction arrays visualized by atomic force
microscopy. J. Am. Chem. Soc. 121:5437–
43
155. LaBean TH, Yan H, Kopatsch J, Liu F,
Winfree E, et al. 2000. Construction, analysis, ligation, and self-assembly of DNA
triple crossover complexes. J. Am. Chem.
Soc. 122:1848–60
156. Fu TJ, Seeman NC. 1993. DNA doublecrossover molecules. Biochemistry 32:
3211–20
157. Zhang S, Fu TJ, Seeman NC. 1993. Symmetric immobile DNA branched junctions. Biochemistry 32:8062–67
158. Li X, Yang X, Jing Q, Seeman NC.
1996. Antiparallel DNA double crossover
molecules as components for nanoconstruction. J. Am. Chem. Soc. 118:6131–40
159. Mao C, Sun W, Shen Z, Seeman NC. 1999.
A nanomechanical device based on the BZ transition of DNA. Nature 397:144–46
160. Rich A, Nordheim A, Wang AHJ. 1984.
The chemistry and biology of left-handed
Z-DNA. Annu. Rev. Biochem. 53:791–
846
161. Pohl FM, Jovin TM. 1972. Salt-induced
co-operative conformational change of a
synthetic DNA: equilibrium and kinetic
studies with poly (dG-dC). J. Mol. Biol.
67:375–96
162. Yurke B, Turberfield AJ, Mills AP,
Simmel FC, Neumann JL. 2000. A
1 Apr 2004
20:30
10.30
163.
164.
165.
166.
167.
168.
169.
170.
171.
172.
173.
174.
175.
AR
AR220-BE06-10.tex
MAVROIDIS
DUBEY
AR220-BE06-10.sgm
LaTeX2e(2002/01/18)
P1: IKH
AR REVIEWS IN ADVANCE10.1146/annurev.bioeng.6.040803.140143
YARMUSH
DNA-fuelled molecular machine made of
DNA. Nature 415:62–65
Simmel FC, Yurke B. 2002. A DNAbased molecular device switchable between three distinct mechanical states.
Appl. Phys. Lett. 80:883–85
Mitchell JC, Yurke B. 2002. DNA scissors. In DNA Computing. Proc. 7th Int.
Meet. DNA-Based Computers, ed. SN
Jonoska, N Seeman. Univ. So. FL, Tampa.
Heidelberg: Springer Verlag
Seeman NC. 2001. DNA nicks and nodes
and nanotechnology. Nano Lett. 1:22–
26
Yang X, Wenzler LA, Qi J, Li X, Seeman NC. 1998. Ligation of DNA triangles
containing double crossover molecules. J.
Am. Chem. Soc. 120:9779–86
Schill G. 1971. Catenanes, Rotaxanes and
Knots. New York: Academic
Ashton PR, Ballardini R, Balzani V, Belohradsky M, Gandolfi MT, et al. 1996.
Self-assembly, spectroscopic, and electrochemical properties of [n]rotaxanes. J.
Am. Chem. Soc. 118:4931–51
Amabilino DB, Asakawa M, Ashton PR,
Ballardini R, Balzani V, et al. 1998.
Aggregation of self-assembling branched
[n]rotaxanes. N. J. Chem. 9:959–72
Sauvage J-P, Dietrich-Buchecker C, eds.
1999. Molecular Catenanes, Rotaxanes
and Knots. Weinheim: Wiley-VCH
Harada A. 2001. Cyclodextrin-based
molecular machines. Acc. Chem. Res. 34:
456–64
Anelli P-L, Spencer N, Stoddart JF. 1991.
A molecular shuttle. J. Am. Chem. Soc.
113:5131–33
Balzani VV, Credi A, Raymo FM, Stoddart JF. 2000. Artificial molecular machines. Angew. Chem. Int. Ed. Engl. 39:
3348–91
Schalley CA, Beizai K, Vogtle F. 2001.
On the Way to rotaxane-based molecular motors: studies in molecular mobility
and topological chirality. Acc. Chem. Res.
34:465–76
Gatti FG, Leon S, Wong JKY, Bottari G,
176.
177.
178.
179.
180.
181.
182.
183.
184.
185.
Altieri A, et al. 2003. Photoisomerization of a rotaxane hydrogen bonding template: light-induced acceleration of a large
amplitude rotational motion. Proc. Natl.
Acad./Sci. USA 100:10–14
Bermudez VV, Capron N, Gase T, Gatti
FG, Kajzar F, et al. 2000. Influencing intramolecular motion with an alternating
electric field. Nature 406:608–11
Fyfe MCT, Stoddart JF. 1997. Synthetic
supramolecular chemistry. Acc. Chem.
Res. 30:393–401
Whitesides GM, Mathias JP, Seto CT.
1991. Molecular self-assembly and
nanochemistry: a chemical strategy for
the synthesis of nanostructures. Science
254:1312–19
Gaviña P, Sauvage JP. 1997. Transitionmetal template synthesis of a rotaxane
incorporating two different coordinating
units in its thread. Tetrahedron Lett.
38:3521–24
Raymo FM, Houk KM, Stoddart JF.
1998. The mechanism of the slippage approach to rotaxanes. Origin of the “all-ornothing” substituent effect. J. Am. Chem.
Soc. 120:9318–22
Whitesides GM, Simanek EE, Mathias JP,
Seto CT, Chin DN, et al. 1995. Noncovalent synthesis: using physical-organic
chemistry to make aggregates. Acc. Chem.
Res. 28:37–44
Asakawa M, Ashton PR, Ballardini R,
Balzani V, Belohradsky M, et al. 1997.
The slipping approach to self-assembling
[n]rotaxanes. J. Am. Chem. Soc. 119:302–
10
Brouwer AM, Frochot C, Gatti FG, Leigh
DA, Mottier L, et al. 2001. Photoinduction
of fast, reversible translational motion in a
hydrogen-bonded molecular shuttle. Science 291:2124–28
Bissell RA, Córdova E, Kaifer AE, Stoddart JF. 1994. A chemically and electrochemically switchable molecular shuttle.
Nature 369:133–37
Martı́nez-Dı́az M-V, Spencer N, Stoddart JF. 1997. The self-assembly of a
1 Apr 2004
20:30
AR
AR220-BE06-10.tex
AR220-BE06-10.sgm
LaTeX2e(2002/01/18)
P1: IKH
AR REVIEWS IN ADVANCE10.1146/annurev.bioeng.6.040803.140143
MOLECULAR MACHINES
186.
187.
188.
189.
190.
191.
192.
193.
194.
195.
switchable [2]rotaxane. Angew. Chem.
Int. Ed.Engl. 36:1904–7
Ashton PRBR, Balzani V, Baxter I, Credi
A, Fyfe MCT, et al. 1998. Acid-base controllable molecular shuttles. J. Am. Chem.
Soc. 120:11932–42
Armaroli N, Balzani V, Collin JP, Gaviña
P, Sauvage JP, Ventura B. 1999. Rotaxanes
incorporating two different coordinating
units in their thread: synthesis and electrochemically and photochemically induced
molecular motions. J. Am. Chem. Soc.
121:4397–408
Benniston AC, Harriman A, Lynch
VM. 1995. Photoactive [2]rotaxanes:
structure and photophysical properties
of anthracene- and ferrocene-stoppered
[2]rotaxanes. J. Am. Chem. Soc. 117:
5275–91
Benniston AC, Harriman A. 1993. A lightinduced molecular shuttle based on a
[2]rotaxane-derived triad. Angew. Chem.
Int. Ed. Engl. 32:1459–61
Benniston AC, Harriman A, Lynch VM.
1994. Photoactive [2]rotaxanes formed
by multiple-stacking. Tetrahedron Lett.
35:1473–76
Murakami H, Kawabuchi A, Kotoo K, Kunitake M, Nakashima N. 1997. A lightdriven molecular shuttle based on a rotaxane. J. Am. Chem. Soc. 119:7605–6
Kaufmann C, Müller WM, Vögtle F,
Weinman S, Abramson S, Fuchs B. 1999.
Rotaxanes with chiral stoppers and photoresponsive central unit. Synthesis 5:
849–53
Ashton PR, Goodnow TT, Kaifer AW,
Reddington MV, Slawin AMZ, et al.
1989. A [2]catenane made to order.
Angew. Chem. Int. Ed. Engl. 28:1396–
99
Deleuze MS. 2000. Can benzylic amide
[2]catenane rings rotate on graphite? J.
Am. Chem. Soc. 122:1130–43
Raymo FM, Houk KN, Stoddart JF. 1998.
Origins of selectivity in molecular and
supramolecular entities: solvent and electrostatic control of the translational iso-
196.
197.
198.
199.
200.
201.
202.
203.
204.
205.
206.
10.31
merism in [2]catenanes. J. Org. Chem.
63:6523–28
Sauvage J-P. 1998. Transition metal containing rotaxanes and catenanes in motion: toward molecular machines and motors. Acc. Chem. Res. 31:611–19
Cambron J-C, Sauvage J-P. 1998. Functional rotaxanes: from controlled molecular motions to electron transfer between
chemically nonconnected chromophores.
Chem. Eur. J. 4:1362–66
Blanco MJ, Jimenez MC, Chambron JC, Heitz V, Linke M, Sauvage J-P. 1999.
Rotaxanes as new architectures for photoinduced electron transfer and molecular
motions. Chem. Soc. Rev. 28:293–305
Leigh DA, Murphy A, Smart JP, Deleuze
MS, Zerbetto F. 1998. Controlling the
frequency of macrocyclic ring rotation
in benzylic amide [2]catenanes. J. Am.
Chem. Soc. 120:6458–67
Fujita M. 1999. Self-assembly of [2]catenanes containing metals in their backbones. Acc. Chem. Res. 32:53–61
Collier CP, Mattersteig G, Wong EW, Luo
Y, Beverly K, et al. 2000. A [2]catenanebased solid state electronically reconfigurable switch. Science 289:1172–75
Balzani VV, Gomez-Lopez M, Stoddart JF. 1998. Molecular machines. Acc.
Chem. Res. 31:405–14
Johnston MR, Gunter MJ, Warrener RN.
1998. Templated formation of multiporphyrin assemblies resembling a
molecular universal joint. Chem. Commun. 28:2739–40
Amabilino DB, Anelli P-L, Ashton PR,
Brown GR, Cordova E, et al. 1995. Molecular meccano. 3. Constitutional and translational isomerism in [2]catenanes and
[n]pseudorotaxanes. J. Am. Chem. Soc.
117:11142–70
Vacek J, Michl J. 1997. A molecular “Tinkertoy” construction kit: computer simulation of molecular propellers. N. J. Chem.
21:1259–68
Michl J, Magnera TF. 2002. Supramolecular chemistry and self-assembly special
1 Apr 2004
20:30
10.32
207.
208.
209.
210.
211.
212.
213.
214.
215.
216.
AR
AR220-BE06-10.tex
MAVROIDIS
DUBEY
AR220-BE06-10.sgm
LaTeX2e(2002/01/18)
P1: IKH
AR REVIEWS IN ADVANCE10.1146/annurev.bioeng.6.040803.140143
YARMUSH
feature: two-dimensional supramolecular chemistry with molecular Tinkertoys.
Proc. Natl. Acad. Sci. USA 99:4788–92
Vacek J, Michl J. 2001. Molecular dynamics of a grid-mounted molecular dipolar
rotor in a rotating electric field. Proc. Natl.
Acad. Sci. USA 98:5481–86
Gimzewski JK, Joachim C, Schlittler
RR, Langlais V, Tang H, Johannsen I.
1998. Rotation of a single molecule
within a supramolecular bearing. Science
281:531–33
Gust D, Mislow K. 1973. Analysis of isomerization in compounds displaying restricted rotation of aryl groups. J. Am.
Chem. Soc. 95:1535–47
Finocchiaro P, Gust D, Mislow K. 1974.
Correlated rotation in complex triarylmethanes. I. 32-isomer system and residual
diastereoisomerism. J. Am. Chem. Soc.
96:3198–205
Finocchiaro P, Gust D, Mislow K. 1974.
Correlated rotation in complex triarylmethanes. II. 16- and 8-isomer systems and
residual diastereotopicity. J. Am. Chem.
Soc. 96:3205–13
Mislow K. 1976. Stereochemical consequences of correlated rotation in molecular propellers. Acc. Chem. Res. 9:26–33
Clayden J, Pink JH. 1998. Concerted rotation in a tertiary aromatic amide: towards
a simple molecular gear. Angew. Chem.
Int. Ed. Engl. 37:1937–39
Hounshell WD, Johnson CA, Guenzi A,
Cozzi F, Mislow K. 1980. Stereochemical consequences of dynamic gearing in
substituted bis (9-triptycyl) methanes and
related molecules. Proc. Natl. Acad. Sci.
USA 77:6961–64
Cozzi F, Guenzi A, Johnson CA, Mislow K, Hounshell WD, Blount JF. 1981.
Stereoisomerism and correlated rotation in molecular gear systems. Residual diastereomers of bis(2,3-dimethyl9-triptycyl)methane. J. Am. Chem. Soc.
103:957–58
Kawada YIH. 1981. Bis(4-chloro-1triptycyl) ether. Separation of a pair of
217.
218.
219.
220.
221.
222.
223.
224.
225.
226.
227.
228.
229.
phase isomers of labeled bevel gears. J.
Am. Chem. Soc. 103:958–60
Johnson CA, Guenzi A, Mislow K.
1981. Restricted gearing and residual
stereoisomerism in bis(1,4-dimethyl-9triptycyl)methane. J. Am. Chem. Soc.
103:6240–42
Bedard TCMJS. 1995. Design and synthesis of a “molecular turnstile.” J. Am.
Chem. Soc. 117:10662–71
Ugi I, Marquarding D, Klusacek H, Gillespie P, Ramirez F. 1971. Berry pseudorotation and turnstile rotation. Acc. Chem.
Res. 4:288–96
Kelly TR, Bowyer MC, Bhaskar KV, Bebbington D, Garcia A, et al. 1994. A molecular brake. J. Am. Chem. Soc. 116:3657–
58
Kelly TR, Tellitu I, Sestelo JP. 1997.
In search of molecular ratchets. Angew.
Chem. Int. Ed. Engl. 36:1866–68
Kelly TR, Sestelo JP, Tellitu I. 1998. New
molecular devices: in search of a molecular ratchet. J. Org. Chem. 63:3655–65
Davis AP. 1998. Tilting at windmills? The
second law survives. Angew. Chem. Int.
Ed. Engl. 37:909–10
Kelly TR, De Silva H, Silva RA. 1999.
Unidirectional rotary motion in a molecular system. Nature 401:150–52
Davis AP. 1999. Synthetic molecular motors. Nature 401:120–21
Kelly TR, Silva RA, De Silva H, Jasmin S,
Zhao Y. 2000. A rationally designed prototype of a molecular motor. J. Am. Chem.
Soc. 122:6935–49
Feringa BL, Jager WF, De Lange B,
Meijer EW. 1991. Chiroptical molecular
switch. J. Am. Chem. Soc. 113:5468–70
Koumura N, Zijlstra RW, van Delden RA,
Harada N, Feringa BL. 1999. Light-driven
monodirectional molecular rotor. Nature
401:152–55
Koumura N, Geertsema EM, van Gelder
MB, Meetsma A, Feringa BL. 2002.
Second generation light-driven molecular motors. Unidirectional rotation controlled by a single stereogenic center with
1 Apr 2004
20:30
AR
AR220-BE06-10.tex
AR220-BE06-10.sgm
LaTeX2e(2002/01/18)
P1: IKH
AR REVIEWS IN ADVANCE10.1146/annurev.bioeng.6.040803.140143
MOLECULAR MACHINES
230.
231.
232.
233.
near-perfect photoequilibria and acceleration of the speed of rotation by structural modification. J. Am. Chem. Soc. 124:
5037–51
van Delden RA, Koumura N, Harada N,
Feringa BL. 2002. Unidirectional rotary
motion in a liquid crystalline environment: color tuning by a molecular motor. Proc. Natl. Acad. Sci. USA 99:4945–
49
Dubey A, Thornton A, Nikitczuk KP,
Mavroidis C, Yarmush ML. 2003. Viral
protein linear (VPL) nano-actuators. Presented at Proc. 2003 3rd IEEE Conf. Nanotechnology, San Francisco
Wilson IA, Skehel JJ, Wiley DC. 1981.
Structure of the haemagglutinin membrane glycoprotein of influenza virus at
3 Å resolution. Nature 289:366–73
Chan DC, Fass D, Berger JM, Kim PS.
234.
235.
236.
237.
238.
10.33
1997. Core structure of gp41 from the HIV
envelope glycoprotein. Cell 89:263–73
Bentz J. 2000. Minimal aggregate size and
minimal fusion unit for the first fusion
pore of influenza hemagglutinin-mediated
membrane fusion. Biophys. J. 78:227–45
Bentz J. 2000. Membrane fusion mediated
by coiled coils: a hypothesis. Biophys. J.
78:886–900
Carr CM, Kim PS. 1993. A spring-loaded
mechanism for the conformational change
of influenza hemagglutinin. Cell 73:823–
32
Knoblauch M, Noll GA, Muller T, Prufer
D, Schneider-Huther I, et al. 2003. ATPindependent contractile proteins from
plants. Nat. Mater. 2:600–3
Mavroidis C, Dubey A. 2003. Biomimetics: from pulses to motors. Nat. Mater.
2:573–74
Mavroidis.qxd
4/1/2004
8:38 PM
Page 1
MOLECULAR MACHINES
C-1
Figure 4 The kinesin-myosin walks. (a) Myosin motor mechanism. (i) Motor head
loosely docking to the actin-binding site; (ii) the binding becomes tighter along with
the release of Pi; (iii) lever arm swings to the left with the release of ADP, and
(iv) replacement of the lost ADP with a fresh ATP molecule results in dissociation of
the head. (b) Kinesin heads working in conjunction. (i) Both ADP-carrying heads
come near the microtubule and one (black neck) binds; (ii) loss of bound ADP and
addition of fresh ATP in the bound head moves the other (red neck) to the right;
(iii) the second head (red) binds to microtubule while losing its ADP, and replacing
it with a new ATP molecule, whereas the first head hydrolyzes its ATP and loses Pi;
(iv) The ADP-carrying black neck will now be snapped forward, and the cycle will
be repeated.
Mavroidis.qxd
C-2
4/1/2004
8:38 PM
MAVROIDIS
■
Page 2
DUBEY
■
YARMUSH
Figure 7 The DNA tweezers. (a) The machine is in the open conformation with the
central strand (black) partially hybridized to the two side strands (red and green);
(b) a fuel strand (white) is introduced; and (c) the fuel strand hybridizes with the two
free ends to bring the device into a closed conformation. With the addition of complement to the fuel strand, it can be removed to leave the system back to state (a).
Figure reprinted with permission from Bernard Yurke, Lucent Technologies.
4/1/2004
8:38 PM
Figure 8 (a) PX and JX2 topological DNA motifs. The two lower double helices, C and D, are rotated by 180° during transition from PX
to JX2. (b) Working principle of the rotary DNA machine: (stage i) Type 1 strands (blue) are removable from PX motifs by the addition of
their respective complementary strands (black dots at ends); (stage ii) the addition of Type 2 strands (purple) results in a rotation of C and
D units; (stage iii) Type 2 strands can then be removed by adding their complementary strands; (stage iv) Type 1 strands added again to
revert the motif back to PX state.
Mavroidis.qxd
Page 3
MOLECULAR MACHINES
C-3
Mavroidis.qxd
C-4
4/1/2004
8:38 PM
MAVROIDIS
■
DUBEY
Page 4
■
YARMUSH
Figure 9 A possible application of two DNA rotary machines to rotate a central disc
by half a rotation at a time to achieve one full rotation. Red tags on the disc are stoppers that will allow linkage to the motifs.