Numerical Simulation of Shake-table Tests of a Full
advertisement

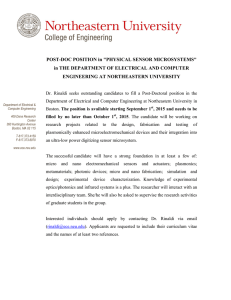
Numerical Simulation of Shake-table Tests of a Full-Scale Building Seismically Isolated with Lead-Rubber Bearings Qingyuan DONG Candidate for the Degree of Master of Engineering Supervisor: Mitsumasa MIDORIKAWA Division of Architectural and Structural Design Keywords: base isolation, lead-rubber bearing, shake-table test, numerical simulation, seismic response. Z (a) Y 1.2 0.6 SW-CLB -0.6 -1.2 1.2 0.6 Y 0 -0.6 -1.2 0 50 (a) 100 150 200 Time (s) 1.2 0.6 W-LRB NW-CLB X -0.6 SE-CLB C-CLB E-LRB N-LRB NE-CLB 5,000 S-LRB Acceleration [g] -1.2 Steel Plates 1.2 0.6 W Y (b) Y 0 -0.6 -1.2 1.2 0.6 E X 0 0 7,000 15,835 900 3,815 3,035 3,000 3,000 3,000 12,000 7,000 5,000 460 2. E-Defense test In August 2011, a full-scale, base-isolated steel moment-frame building was tested using the E-Defense shake table [1]. As shown in Fig. 1(a), the two-by-two bay, five-story building was 10-m and 12-m wide in the X and Y-directions, respectively, and 15.8-m tall. The building had a total weight of W = 542 tons. Steel plates weighing 54 ton were placed on the roof to introduce a mass eccentricity ratio of 2% (the distance between the mass center and geometric center divided by the floor-plan dimension) in the Y-direction of the isolation layer. As shown in Fig. 1(b), the isolation system comprised four lead-rubber bearings (LRBs) and five cross-liner bearings (CLBs) between the shake table and the building. The LRBs were placed under the four edge columns, and the CLBs were placed under the four corner columns and the center column. Fig. 2 shows the dimensions of the LRB. The LRB had a first shape factor S1 of 23.8, and a second shape factor S2 of 2.8. The initial vertical stress on four LRBs ranged from 0.66 to 2.1 N/mm2. The CLBs comprised two linear bearings oriented orthogonally to each other, and had negligible horizontal stiffness and very large vertical stiffness compared to the LRBs. Fifteen excitations were conducted. This paper focuses on three excitations. The Iwanuma motion from the 2011 Tohoku earthquake was a long-duration motion. The Rinaldi motion, obtained from the 1994 Northridge earthquake, featured very large vertical acceleration. Fig. 3 shows the time history of the two excitations, 100%-XY Iwanuma and 88%-XYZ Rinaldi. Another excitation, 88%-XY Rinaldi, had the same X and Y acceleration as the 88%-XYZ Rinaldi, but did not include vertical acceleration. The same building was also 673 lead core 102 tested with the isolation layer steel shim 3 removed and its base fixed to total thickness 119 the shake table. The building in rubber layer 6 total thickness 240 fixed-base configuration was subjected to reduced-scaled Iwanuma and Rinaldi motion Figure 2. LRB Dimensions. to enable comparison between (in mm) the isolated and fixed-base building. Acceleration [g] 1. Introduction Numerical simulation of a full-scale five-story building base isolated by a system of lead-rubber bearings (LRBs) and crossliner bearings (CLBs) was performed. The structure was subjected to a number of bidirectional and bidirectional-plusvertical ground motions using the E-Defense shake table. A three-dimensional nonlinear model of the structure was established and subjected to ground motion measured on the shake table. The behavior of LRBs, response of the building, vertical loads, and the effectiveness of the LRB-CLB isolation system are discussed. Z 0 Shake Table X 5,000 -0.6 5,000 Figure 1. Outline of the building: (a) North elevation; (b) Location of bearings. (Unit: mm) -1.2 0 (b) 10 Time (s) Figure 3. Input motions: (a) 100%-XY Iwanuma; (b) 88%-XYZ Rinaldi. 20 4. Validation of analysis The fundamental period of the building with its base fixed was 0.69 s in the analysis, which is very close to the experimental value of 0.7 s identified through white noise excitation. The computed response is compared against the test results for the 100%-XY Iwanuma and 88%-XY Rinaldi motions in terms of the hysteresis of the S-LRB (Fig. 8), maximum story drift (Fig. 9), maximum floor acceleration (Fig. 10) and translation and twist angle of the isolation layer (Fig. 10 and 11). MSS-4 spring MSS-6 spring MSS-8 spring MSS-12 spring 350 175 Disp-Y [mm] 3. Model of the structure A 3-D nonlinear model of the structure was produced. The model included all columns and girders of the building and each LRB and CLB. Members of the superstructure were modeled as linear elastic. An end zone was added at every girder-to-column joint to consider the stiffness of the joints. To simulate rigid floor diaphragms, the relative horizontal distances between the nodes in each floor were fixed. Composite beam effect was accounted for by multiplying the flexural stiffness by 2 for girders with concrete slab at two sides, and multiplying by 1.5 for girders with concrete slab on one side only. Masses were lumped to the girder-to-column joints according to the gravity load distribution of the building and the mass moment of inertia of each floor. As shown in Fig. 4, a multiple shear spring (MSS) model was used to simulate the bidirectional horizontal response of LRBs [2]. The MSS model comprised horizontal springs placed evenly in a circular configuration. As shown in Fig. 6(a), each horizontal spring behaved bilinearly. Based on production test, the target bilinear model had an initial stiffness K0 of 6.5 kN/mm, post-yielding stiffness KF of 0.65 kN/mm, and yield strength FU of 73 kN. Fig.5 shows the bidirectional displacement response of an LRB subjected to 4 cycles of slow, circular forces. The figure compares MSS models with different number of horizontal springs. While models with 4and 6-springs showed oscillation, models with 8- and 12springs moved smoothly along a circular orbit. Therefore, based on a convergence study, the 8–spring model was deemed sufficient. Fig. 6 shows that the 8-spring MSS model agreed with monotonic target response. The vertical response of the LRBs was modeled by a bilinear model, as shown in Fig. 6(b), with a compressive stiffness KC of 1500 kN/mm and tensile stiffness K T of 150 kN/mm. From the formula, σ cr = /( 2 2) S1S2, the critical compressive stress σcr of the LRB was 30.6 MPa. The CLBs were modeled as bidirectional rollers. In the isolation layer, the horizontal restoring force was derived from the four LRBs only. Fig. 7 shows the unidirectional force versus displacement relationship of the LRBCLB isolation system. The bracketed values in the ordinate are the restoring force, V, normalized by the total weight of the building, W. The bracketed values in the abscissa are the horizontal strain assuming that the four LRBs deform equally. The isolation system provided a yield strength of V/W=0.055 and a strength of V/W=0.34 at 250% strain, which is the design limit specified for the specimen. From the formula, Teff = 2π(M/Keff)0.5 [3], and Keff =3.0 kN/mm (the effective stiffness at 250% strain), the effective period is evaluated as Teff = 2.66 s, which is four times the fundamental period of the building when its base was fixed, 0.7 s. Rayleigh damping was specified by assigning 2% critical damping for the period of 0.7 s and 2.5% for the period of 2.66 s. Analysis was performed with a time increment of 0.01s.Recorded acceleration of the shake table was used as ground motion. 0 -175 -350 -350 -175 0 175 Disp-X [mm] 350 Figure 5. Displacement orbit of MSS model under dynamic force. Figure 4. Outline of the MSS model: (a) Elevation view; (c) Plan view. (a) Force (b) KT Disp. KC Figure 6. Skeleton curve of LRB: (a) horizontal; (b) vertical. 1823 (0.34W) Restoring force (kN) (0.054W) 292 11mm (4.6%) Horizontal deformation (mm) 600mm (250%) K eff =3.0 kN/mm Figure 7. Force vs. deformation relationship of LRB-CLB isolation system. Analy. Exper. 5 4 4 3 3 2 Floor 5 1 0 2 (a) 200 400 600 RF 1 0 RF 5 5 4 4 3 3 2 1 0 400 200 400 2 (c) 200 (b) 600 1 0 Disp.-X (mm) 600 (d) 200 400 600 Disp.-Y (mm) RF 5 5 4 4 3 3 2 Floor RF Analy. Exper. 1 0 2 (a) 0.5 1 RF 1 0 0.5 1 RF 5 5 4 4 3 3 (c) 2 1 0 (b) 0.5 Acce.-X (g) (d) 2 1 1 0 0.5 1 Acce.-Y (g) Figure 10. Maximum floor acceleration: (a), (b) X-dir. and Ydir. from 88%-XY Rinaldi; (c), (d) X-dir. and Y-dir. from 88%-XY Rinaldi. Force-Y [kN] (a) -200 Force-X [kN] 400 200 0 (c) -200 400 200 0 (b) -200 -400 -400 -200 0 200 Disp-Y [mm] 400 Force-Y [kN] Force-X [kN] 0 -400 -400 -200 0 200 Disp-X [mm] 400 200 0 (d) -200 -400 -400 -200 0 200 Disp-Y [mm] 400 Figure 8. Hysteretic loop of S-LRB: (a), (b) X-dir. and Y-dir. from 100%-XY Iwanuma; (c), (d) X-dir. and Y-dir. from 88%-XY Rinaldi. 400 (a) 200 Exper. Analy. Exper. Analy. 0 -200 -400 0 400 50 100 150 (b) 200 200 0 -200 -400 0 1 50 100 150 200 Exper. (c) Analy. 0 -1 0 50 100 150 200 Time (s) Figure 11. Translation and twist angle of isolation layer for 100%-XY Iwanuma motion: (a) X - translation; (b) Y -translation; (c) Twist Angle. Disp.-X [mm] Figure 9. Maximum floor acceleration: (a), (b) X-dir. and Ydir. from 100%-XY Iwanuma; (c), (d) X-dir. and Y-dir. from 88%-XY Rinaldi. 200 400 Analy. Exper. -400 -400 -200 0 200 Disp-X [mm] 400 Twist Angle [degree] Disp.-Y [mm] RF 400 Disp.-X [mm] RF Fig. 11 and 12 compares the translation and twist angle of the isolation layer represented by the center column location. The computed translation and twist angle showed good match with the test result when the translation was large (especially near 300-mm), but did not match when the translation was small. The MSS model is calibrated to production test conducted to a maximum displacement of 300-mm, and was not suited to represent the range of smaller translation. Twist Angle [degree] Disp.-Y [mm] As shown in Fig. 8, for both motions, the computed maximum displacement was similar to that from the test. However, test loop was notably more slender near the center due to the pinching (typical for a lead-rubber bearing). The pinching of the loop near zero displacement is not included in the MSS model used in this study. And the test loop was somewhat larger and more unsmooth than the computed. Fig. 9 suggests that the analysis provided a good match with the experiment for maximum story drift. A nearly uniform displacement profile along the height of the building was obtained because the base-isolation system was effective. For both motions, the maximum story drift ratio was smaller than 1/200, which is the limit for building frames, in analysis and test. In Fig. 10, the maximum floor acceleration in the analysis matched the test in one direction but showed some discrepancy in the other direction. The discrepancy may be due to the limitation of the MSS model mentioned above. For these two motions, the maximum floor acceleration was smaller than 0.6g from both analysis and test. As previously noted, the isolation layer had a mass eccentricity ratio of 2% in the Y-direction. The mass-stiffness eccentricity ratio (the distance between the mass center and stiffness center divided by the floor-plan dimension) was 6% in the isolation layer. 400 200 (a) Exper. Analy. Exper. Analy. 0 -200 -400 0 400 200 5 10 15 (b) 20 0 -200 -400 0 1 5 10 15 (c) 20 Exper. (c) Analy. 0 -1 0 5 10 Time (s) 15 Figure 12. Translation and twist angle of isolation layer for 88%-XY Rinaldi motion: (a) X - translation; (b) Y -translation; (c) Twist Angle. 20 5. Effect of LRB-CLB isolation system Fig. 13 compares the maximum floor acceleration of the baseisolated case and base-fixed case. The maximum of the vectorsum acceleration aiF,max, normalized by the maximum vectorsum table acceleration aT,max, is taken for the abscissa. The maximum measured table acceleration for the Iwanuma and Rinaldi motion were 0.57g and 1.14g, respectively. The factor aiF,max / aT,max increased along the building height in the basefixed case. The factor aiF,max / aT,max of the base-isolated case was smaller than unity for both motions, reaching at the roof 0.63 and 0.49 in the test, and 0.71 and 0.34 in the analysis. Therefore, the test and analysis agrees that the LRB-CLB system worked effectively to reduce floor acceleration. 7. Conclusions The MSS model captured the fundamental behavior of the LRB and the computer model captured the response of the fullscale base-isolated building specimen. Both test and analysis indicated that floor acceleration and story drift ratio were reduced effectively by the LRB-CLB isolation system. Isolated-Exper. Fixed-Exper. Isolated-Analy. RF RF 5F 5F 4F 4F 3F 3F 2F 2F 1F 1F Table 0 1 2 3 4 Table 0 1 Fixed-Analys 2 3 4 (a) Iwanuma motion (b) Rinaldi motion Figure 13. Ratio of horizontal max-vector-sum value between response acceleration and table acceleration Vertical Force [kN] 0 (a) Exper. Analy. -1000 -2000 0 0 4 8 12 Exper. (b) Analy. -1000 -2000 0 4 8 12 Time (s) Figure 14. Vertical force in LRBs for 88%-XY Rinaldi: (a) NLRB; (b) S-LRB. σ = 1.0 MPa 0 Vertical Force [kN] 6. Vertical load in isolation layer Fig. 14 and 15 compares the time history of the vertical force (tension as positive) in N-LRB and S-LRB for the 88%-XY Rinaldi and 88%-XYZ Rinaldi motion. The load applied to the LRBs at stationary condition was different between test and analysis, because in the test, the superstructure could not be placed perfectly evenly on the nine bearings. For the 88%-XY Rinaldi motion, the vertical force on the bearings was caused primarily by overturning moment in the superstructure. As shown in Fig. 14, in instants when the NLRB saw increase in compression, the opposite S-LRB saw decrease in compression, and vice versa. Aside from the difference in initial vertical force, the computed response was smaller than the test when the vertical force approached zero. For the 88%-XYZ Rinaldi motion, the vertical force on the bearings was caused by both the overturning moment and vertical table acceleration. As shown in Fig. 15, similar to the XY case in Fig. 14, the force was smaller in the analysis than in the test when the vertical force approached zero or exceeded zero. This phenomenon is likely due to the difference in how vertical forces were redistributed between LRBs and CLBs. The roller models were infinitely stiff in the vertical direction and hence drew larger forces than the actual LRBs, especially when the dynamic vertical force was in tension. As shown in Fig. 15, in the 88%-XYZ Rinaldi motion test, the largest measured stress in N-LRB and S-LRB was -5.5 N/mm2 in compression and 1.02 N/mm2 in tension. The compressive stress in LRBs was quite small compared with the critical compressive stress σcr = 35.4 MPa. The safety of LRBs was satisfied under combined action of the compressive force and large horizontal deformation. REFERENCES [1] Sasaki T, et al. (2012). NEED/E-Defense base-isolation tests: Effectiveness of friction pendulum and lead-rubber bearings systems. 15th World Conference of Earthquake Engineering, Lisbon, Portugal, September 24-28, 2012. [2] Furukawa T, et al. (2005). System Identification of BaseIsolated Building using Seismic Response Data. Journal of Engineering Mechanics, ASCE, Vol. 131, No3. [3] Architectural Institute of Japan (2001). Recommendation for the Design of Base Isolated Structures. Maruzen, Tokyo. Third Edition (in Japanese). (a) Exper. Analy. -1000 -2000 0 0 6 (b) 12 Exper. Analy. -1000 -2000 0 σ = -5.5 MPa 6 Time (s) Figure 15. Vertical force in LRBs for 88%-XYZ Rinaldi: (a) N-LRB; (b) S-LRB. 12