Phase gradient approach to stacking interferograms
advertisement

JOURNAL OF GEOPHYSICAL RESEARCH, VOL. 103, NO. B12, PAGES 30,183-30,204,DECEMBER 10, 1998
Phase gradient approach to stacking interferograms
David T. Sandwelland Evelyn J. Price
Instituteof Geophysics
andPlanetaryPhysics,ScrippsInstitutionof Oceanography,
La Jolla,California
Abstract. The phasegradientapproachis usedto constructaveragesanddifferencesof
interferograms
withoutphaseunwrapping.Our objectivesfor changedetectionare to increase
fringeclarityanddecrease
errorsdueto tropospheric
andionospheric
delayby averagingmany
interferograms.The standardapproachrequiresphaseunwrapping,scalingthephaseaccordingto
theratioof the perpendicular
baseline,andfinally formingthe averageor difference;however,
uniquephaseunwrappingis usuallynotpossible.Sincethephasegradientdueto topographyis
proportionalto the perpendicular
baseline,phaseunwrappingis unnecessary
prior to averagingor
differencing.Phaseunwrappingmay be neededto interprettheresults,but it is delayeduntil all of
thelargesttopographic
signalsareremoved.We demonstrate
themethodby averagingand
differencingsix interferograms
havinga suiteof perpendicular
baselinesrangingfrom 18 to 406
m. Cross-spectral
analysisof thedifferencebetweentwo Tandeminterferograms
provides
estimatesof spatialresolution,whichareusedto designprestackfilters. A widerangeof
perpendicular
baselines
providesthebesttopographic
recoveryin termsof accuracy
andcoverage.
Outsideof mountainous
areasthetopography
hasa relativeaccuracyof betterthan2 m. Residual
interferograms
(singleinterferogram
minusstack)havetiltsacrosstheunwrapped
phasethatare
typically50 mm in bothrangeandazimuth,reflectingbothorbiterrorandatmospheric
delay.
Smaller-scale
waveswith amplitudes
of 15 mm areinterpreted
asatmospheric
lee waves.A few
GlobalPositioningSystem(GPS) controlpointswithin a framecouldincreasethe precisionto
-20 mm for a singleinterferogram;
furtherimprovements
maybe achievedby stackingresidual
interferograms.
of these questionshave been adequatelyaddressed
in previous
publications,and there alreadyexist testedand efficient InSAR
codes. Nevertheless,we hopeour answerswill help clarify the
1. Introduction
Synthetic ApertureRadar Interferometry(InSAR) is a
promisingnew too! for makingprecisegeodeticmeasurements literature in several areas.
overlargeareas[Gabrielet al., 1989;MassonnetandRabaute,
Repeat-pass interferometry records the phase difference,
1993; Massonnet et al.,
1993; Zebker et al.,
1994a;
Massonnetand Feigl, 1995a; Dixon et al., 1993; Meadeand
Sandwell, 1996]. Sumsof interferogramscould be used to
generate high-resolution topographic maps [Zebker and
Goldstein, 1986; Werner et al., 1992; Madsen et al., 1993;
Zebker et al., 1994b, 1997], while differences may reveal
tectonic deformations and atmospheric-ionosphericdistur-
bances[Afraimovichet al., 1992; Massonnet et al, 1995;
Massonnetand Feigl, 1995b;Peltzeret al., 1996; Peltzerand
Rosen, 1995; Goldstein, 1995; Rosen et al., 1996; Tarayre
and Massonnet, 1996; Zebker et al., 1997]. We present a new
approachto the analysisof interferograms
basedon the gradient of the phaserather than the phaseitself. Becausethis
method is largely untested, we attempt to addressthe
followingquestions:What is the bestmathematicalmodelfor
relatingphaseandphasegradientsgiven uncertaintiesin the
data? What are the main limitations
of InSAR
measurements
derivedfrom ERS datafor bothline of sight(LOS) accuracyand
horizontal resolution? How can InSAR databe improved for
bothtopographic
recoveryand changedetection?What is the
best design for an InSAR processingsystem in order to
achievenearoptimalresultsandbe efficient? Of course,many
Copyright
1998bytheAmerican
Geophysical
Union.
Papernumber1998JB900008.
modulo 2r•, between the reference and repeat SAR passes.
Since the absolute phase difference is not measured, the
fundamentalquantity in the interferogram is the local phase
gradient; phase differences between two points within the
frame are best establishedby contourintegration along a continuouspath. Assumingthere are no true phasediscontinuities
or layover, the sumof the phase changes aroundany closed
loop within the interferogrammustbe zero (i.e., zero residue)
[Goldstein et al., 1988' Ghiglia and Pritt, 1998], so phase
changes can be describedby a conservative (or analytic)
function [Resnickand Halliday, 1966, p. 153' Kaplan, 1973,
p. 593]. The most importantaspectsof the phasegradientare
that the phase gradient due to topography scales with the
perpendicularbaseline (equation(A5) and that phase gradient
is usually a continuousfunction of x (range) andy (azimuth),
while the wrappedphasecontainsmany 2r• jumps. Becauseof
theseproperties, phase gradientscan be scaledand summed
without phase unwrapping, which is notoriously difficult
when the signal-to-noiseratio (SNR) is low or when there are
phase discontinuities due to layover, shadowing, or
displacementat faults [Goldsteinet al., 1988' Zebker et al.,
1994a]. The conservationproperty of phase also leads to a
theoretically simple two-dimensional phase unwrapping
method[Ghiglia and Romero,1994], whichwe will employ to
removeresiduesfrom the stackedphasegradients.
After developingthe mathematicalframeworkfor the phase
0 ! 48-0227/98/! 998 JB900008509.00
30,183
30,184
SANDWELLAND PRICE: STACKINGINTERFEROGRAMS
mission to demonstratethe stackingmethod and to estimate
error sources.On the basisof previousstudies,error is divided
into short-wavelengthradar noise [Li and Goldstein, 1990;
Zebker and Villasenor, 1992; Gatelli at al., 1994],
intermediate-wavelength tropospheric-ionospheric delay
compared
directlywith geodeticmeasurements
of grounddisplacement,
sophaseunwrapping
is still required.(2) Thegradientoperationenhances
the short-wavelength
noise, so careful low-passfiltering of the full-resolutioninterferogram
is
required. (3) The standardresidue-treealgorithm for phase
[Goldstein, 1995; Rosen et al., 1996; Massonnet et al., 1994;
Tarayre and Massonnet, 1996; Zebker et al., 1997], and
unwrapping [Goldsteinet al., 1988] cannotbe usedon stacked
longer-wavelengthorbit error [MassonnetandRabute, 1993;
Zebker et al., 1994a]. The common signal is the average
(stack) of N interferograms,while the noise is the difference
betweentwo interferograms
or the differencebetweena single
interferogram
andthe stack. Over the short-wavelengthband
0• < 2 km), cross-spectral
analysisis usedto examinethe SNR
as a function of wavelengthin both the range and azimuthal
directions. Theseestimatesare usedto designprestackand
poststack low-pass filters to suppress short-wavelength
noise. Over the intermediate-wavelength
band (2-60 km), one
SAR image displays troposphericdelays due to atmospheric
gravitywaves. We usethis information on atmosphericdelay
to betterunderstand
the role of ancillarymeasurements
(e.g.,
Global PositioningSystem(GPS)) in mitigatingtheseeffects.
Finally, large-scaledifferencesin interferogramsreveal the
combinedeffects of orbit error and average troposphericionosphericdelay.
Using this theory and ERS signal characteristics,we are
developingan InSAR-processingsystem. Our designgoals
are to minimize the complexity of the code and processing
stepsin orderto avoid blunders,to documentthe system and
makeit easyto use,to constructa modularsystemwherethe
main communicationchannel is through a standardizedfile
some small residue.
phasegradientssince every closedpath of integrationhas
The standardapproachto addingor subtractingwrapped
phaserequiresphaseunwrapping,scaling the phaseby the
ratio of the perpendicular
baseline,and finally formingthe
average[Zebkeret al., 1994a; Werneret al., 1996]. Unique
phaseunwrappingis not alwayspossible becauseareasof the
interferogrammay not be coherentowing to high relief or
wavelength-scale
surfacechangesbetweenthe two observation times [Goldstein,1995]. Here we avoid phaseunwrapping or delay it until the final step of the processing.
Suppose•Pland•Psare wrappedphasesof two interferograms
havinglong (1) andshort(s) baselines,respectively. Because
the phaseis wrapped,one cannot scale •psinto •Pl (higher
fringerate) or vice versa. However,one can computeand scale
the phase gradient. Using the chain rule, we find that the
gradient
of thephase
•p= tan-1(I/R)is
RVI = 1VR
v•p(x) =
R2+i •
(1)
whereR(x) and/(x) are the real andimaginary componentsof
the Earth-flattened interferogram (equation (A10)).
The
interferogramis the product of two registeredsingle look
(SLC)images
C•C2'(asterisk
denotes
complex
header,andto makethecodeefficientby programming
in the complex
conjugation),
and
we
will
refer
to
C•
and
C2
as
the
reference
and
mostappropriate
language.Finally,we avoid adjustingtrends
acrossthe interferogramand strive to achieveaccurateresults
by usingthe best availableorbit information [Scharrooet al.,
1998] and atmosphericcorrections.
2. Theory
2.1.
Phase
Gradient
There are several advantagesto working with the phase
gradientinsteadof the phase: (1) The phasegradient can be
computeddirectlyfrom the real and imaginary componentsof
the interferogram [Werner et al., 1992] without first computing the phase; this is especially important when the noise
level approachesn rad per pixel. (2) The Earth-flattening correction is easily expressedin terms of a phase gradient
(AppendixA). (3) Phasegradientscan be averagedor differencedwithoutphaseunwrapping,so a digital elevation model
(DEM) is not requiredfor changedetection.The averageof the
phasegradientfrom many repeat interferograms,having different baselines,will eventually fill the gaps dueto temporal
and baselinedecorrelation. A long-term averageshouldminimize the phase errors due to tropospheric and ionospheric
delay andthus provide an accuratebase for change detection
interferograms[Zebkeret al., 1997; Fujiwara et al., 1998]. (4)
The gradientof the residualphaseis a componentof strainthat
can be computeddirectly from a numericalmodel of surface
deformation. In a previousstudy[Priceand Sandwell, 1998]
we showedthat these advantagesand simplifications enable
one to examine shorter wavelengths in the interferogram
wherethe signal-to-noise
ratio may be low. Thereare several
disadvantages
to this approach:(1) Phasegradientscannotbe
repeatimages,respectively. Unlike the wrappedphase, which
containsmany 2n jumps, the real and imaginary components
of the interferogramare usuallycontinuousfunctions,andthus
the gradientcan be computedwith a convolution operation.
Becausethis is a finite differenceof nearby pixels, one must
minimize the overall phase gradient prior to computingthe
derivatives; a large part of the phase gradient is removed
during the Earth-flattening operation (Appendix A). The
averagephasegradientfrom N interferogramseach having a
perpendicularbaselinebi is
v•p
=1
• I v•Pi
N i=l•-i
(2)
wherev•p is the phasegradientper unit baseline. During
averaging, one can weight regions of the individual
interferogramsaccordingto the local correlation and local
topographicgradientto achievean optimal mix. Our initial
approach is to edit phase gradient estimates where the
correlationfalls below 0.2 or the magnitudeof the phase
gradientis greaterthan 1.2 rad per pixel.
Properweighting of the componentinterferogramswill
dependon many factors and will requirea more complete
analysis than we will provide below using only six'
interferograms. However, it is clear that the simple
unweightedaverage(equation(2)) is not correct. Considerthe
average of one 10-m baseline and five 100-m baseline
interferograms; the short-baseline interferogram will
dominate the stack yet it could be contaminatedby
atmosphericartifacts. A more reasonableassumptionis that
eachphasegradientestimatehas about the samenoise level,
SANDWELLAND PRICE: STACKINGINTERFEROGRAMS
independentof baselinelength. In this case, the components
shouldbe weightedby the absolutebaselinelength
• sgn(bi)
i=1
N
N
(3)
5; b,t
i=1
It is clear that the cumulative
where VlPsecular
is strainrate. It is clear that the cumulativetime
span in the denominator of (6) should be large to achieve
maximum
N
i=1
baseline
in the denominator
of
(3) should be large to achieve maximum noise reduction.
Longer baselineswill provide better noise reduction, but these
estimateswill not be reliable in areas of ruggedterrain where
the phasegradient exceeds1.2 tad per pixel. Hopefully, the
estimatesfrom shorterbaselineswill fill these gaps. Areas of
layover can never be filled, and these data gaps pose a major
obstacle to the phase unwrapping schemeoutlined in section
2.2. [Zebker and Lu, 1998]. In practice, a suite of baselines
will provide the best estimateof V0 .
For changedetectionone selects a candidateinterferogram
spanning a deformation event and subtracts the long-term
averageafter multiplying by the perpendicularbaseline:
30,185
noise reduction.
The main new feature of this approachis that the averaging
and differencing of many interferograms for topographic
recoveryand changedetectionis all done prior to unwrapping
the phase. Moreover, in the caseof changedetection,removal
of the main topographic signal reducesthe phase gradient
toward zero. Thus, in areas of poor correlation, an initial
guessof zero phasegradientwill providea good starting point
for any phase unwrapping algorithm.
2.2.
Phase Unwrapping
and Residue Elimination
As noted in section 1, the main weaknessof the phase
gradientapproachis that the gradientsmust still be integrated
to recover topography and/or displacement. The two main
unwrappingapproachessummarizedrecently [Zebker and Lu,
1998; Ghiglia and Pritt, 1998] are the residue-treealgorithm
[Goldsteinet al., 1988] and the least squaresalgorithm [Hunt,
1979; Ghiglia and Romero, 1994]. Unfortunately,the residuetree algorithm cannot be applied to stacked phase gradients
WlPchange
= WIp-bWIp
(4) becausethe stackis completelypopulatedwith small residues.
Considerthe integrationof the phase gradient arounda closed
If the perpendicularbaselineof the interferogramspanningthe
path C containing area A. If the phase •pis a continuous
eventis short,then Ibl is smallanderrorsin the topographic
function and has continuousfirst derivatives, then by Stokes
correction will be unimportant.
If there are several
theoremit is equal to the integral of the divergenceof the curl
interferograms spanning the same event, then they can be over the area:
averaged to improve the SNR. Note that this quantity
(equation(4))is the horizontal gradient of the line of sight
displacementor an unusualcomponentof strain. This strain
dx dy
(7)
componentcouldbe computeddirectly from a model, so phase
,axay ayax
unwrappingis not required. However, phase unwrapping is
requiredto convert the phasegradientanomaly to total phase
for comparisonswith other geodeticmeasurements.
Moreover, if the phaserepresentsa conservativefunction such
There are threeend-membercasesfor change detection: (1)
as topography,then both integralsare zero for all paths/areas.
an event where the phase delay anomaly occursin a single We have computedthe curl of the stacked phase gradient of
SAR image (usually atmospheric), (2) an event where the example data sets (below), and as expected, we find paired
phase delay anomaly is permanent(earthquake),and (3) a residuesassociated
with areasof layover. The unfortunate
secular time variation
where the strain rate is uniform.
In this
resultis that the residuesin other areasare never exactly zero.
study,we only considercase 1 using real data. One approach This is becausethe range and azimuth phase derivatives are
to isolatingan event using noisy data is
performed independently, edited independently, and then
N
stackedindependently;there is no reason that they shouldbe
consistent. The implication is that different integration paths
Vq}atmosphere
= i=1N
(5) betweentwo points will always yield slightly different results,
and thus the residue-cuttree algorithm cannot be used.These
small residues can be eliminated as described next, but this
i=1
whereV0• is the phasegradientanomalyfrom (4) and]5 is the
spatialcorrelationfunctiongiven in (A15). Whenthe quality
of the individual change interferograms is highly variable
involves unwrapping the phase using an approach that is
functionally equivalentto the least squaresapproachof [Hunt,
1979].
Oddly, we derive the so-called least squares approach
and/or there is a wide range of perpendicularbaselines, it is
without
using the principle of least squares! We then show
best to downweight the inferior data. For the permanent
that
our
approach is mathematically different from the least
change,(5)can also be usedalthough it is not necessaryto
have a common SAR image in all of the component squaresapproachalthough it is functionally equivalent. Let
interferograms'
they mustsimply spanthe event. Finally, for u(x) = (&p/c•x,&p/c•y)be the numericalestimatesof phase
secularchangewherea constantstrain rate is expected,one gradient (range, azimuth)as given in (1), (3), or (4). Any
vector field can be written as the sum of two vectors as
couldweighteachinterferogramaccordingto its absolutetime
follows:
spanIml'
• sgn(Ati)
V•pi
V IPsecular
= i=1
N
i=I
u = v0+vxw
(8)
(6)
where 0 is a scalarpotential and • is a vector potential. We
aqq•!mothat tho phaqois a conservative filnoticm, en that tho
30,186
SANDWELLAND PRICE: STACKINGINTERFEROGRAMS
rotational part of the vector field must be zero everywhere.
However, layover, filtering, and stacking interferograms
introducea rotational componentthat shouldbe eliminated.
This is accomplishedby taking the divergenceof (8) since
V ßV x • -- 0. The phaseandphasegradientare now relatedby
the following differential equation:
V.u=V2•p
(9)
For a finite region the outward component of the phase
gradient shouldbe zero along the boundaries [Ghiglia and
Romero, 1994]; VO' n = 0, wheren is the outwardnormal.
The two-dimensional Fourier transform of (9)provides an
algebraicrelationshipbetweenthe total phaseOtot(k)andthe
measuredphasegradientu:
Otot(k)
=[•l[ik
ßIr2[u•
(10)
2rrlk2
where
k = (I/2,x,I/2,y)andIt2[.]andF2-i[.]aretheforward
and
inverse two-dimensional Fourier transforms, respectively.
I
•4
I
I
I
The zero phase gradient boundary condition is automatically
satisfiedif the Fourier transformhas only cosine components
[Ghiglia and Romero, 1994; Presset al., 1992, p. 514]. In
practice, one takes the two-dimensional Fourier transform of
eachcomponentof the estimatedphasegradient, scalesby the
appropriate wavenumber,and inverse cosine transforms the
sum. Note that our expressionis slightly different from the
expressions by Ghiglia and Romero [1994], and this
differencereflectsnot only the differencein the derivation but
also the difference in the method of computing derivatives
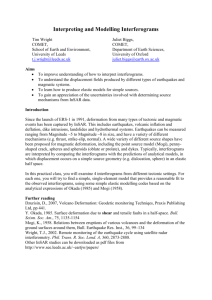
(Figure 1). In the next section we describe a numerical
derivativeoperatorthat follows the gain of an ideal derivative
operatorout to one-half bandwidthof the interferogram. The
least squaresapproachof Hunt [1979] uses a first-difference
approximation to the Laplacian operator (i.e., second
derivative),which doesnot matchthe gain of a true derivative,
especiallyat high wavenumber. The sinc-functionloss of the
first-difference operation is recovered through the cosine
termsin the denominator(equation13 by Ghiglia and Romero
[1994]). Both approachesare correct since the respective
inverse operators match the forward differential operator
(Figure 1). A secondsubtle differenceis that in the least
I
I
ß
,•'
i
1
'.""
•- 1
0
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
i
i
i
i
I
0.5
0,6
0,7
0.8
0.9
10
0
(• 0.5 -
0
0
I
0,1
I
0,2
I
0,3
I
0.4
fractionof Nyquist
Figure 1. (top) Transfer functionsof differential operators(dottedcurveis ideal derivative, dashedcurveis
first difference,andsolidcurveis ParksMcClellandesign;seeFigure3). (middle)Inverseintegral operatorfor
first difference (dashedcurve) and ideal derivative (solid curve). (bottom) Gain of combined differential
operator followed by integral operator (dashedcurve is first difference approach, and solid curve is the
approachusedin this paper). Note that our approachhas signalloss at wavelengthsshorterthan 0.5 times the
Nyquist wavelength.
SANDWELLAND PRICE: STACKINGINTERFEROGRAMS
squaresapproach,two derivatives are performedin the space
domainwhile in our approachone derivative is performedin
the space domain while the second is performed in the
wavenumberdomain. This complicates the computer code
slightly becausethe forwardtwo-dimensional(2-D) transform
on each component of phase gradient involves a sine
transform(in the differentiateddirection) followed by a cosine
transform
shapedfilter was usedto avoid the prominent sidelobes of a
simpleboxcaraverage. For ERS-1/2 the spacingof pixels in
groundrangeis -5 times the spacingof pixels in azimuth. We
have designeda convolution filter that is nearly isotropic in
ground-rangeand azimuth coordinates:
(11)
in the other direction.
wherex isrange,
y is azimuth
andcrx,
y arefilterwidths.Onthe
3. Data Analysis
3.1.
30,187
basis of the resultsof the coherenceanalysis (section 3.3.),
wehavesetcrx
= 8 m andCry
= 16m,whichcorresponds
toa 0.5
Selection
gain at a wavelengthof 42 m in range(105-m groundrange)
To assessthe improvementsin SNR dueto stackingphase
and84 m in azimuth. The actualfilter is a discreteform of (11)
gradientsas well as to estimate the various error sourcesin
with dimensions
of 5 pixelsin rangeand 17 pixelsin azimuth.
ERS interferograms, we have selected six frames from the
The gradientoperationfollows the low-passGaussianfilter.
Tandemmissionwhich spana short period of time andhave a
As shownin Figure 1, a two-point, first-differencefilter will
wide rangeof baselines(Table 1). From thesewe have formed
introducesinc-functionsidelobesin the spectrumthat will
six interferograms. The areaof the frames(Figure 2) was the
leak from shortwavelengths
to long wavelengthsif the intersite of the 1992 Landersearthquake,so we had purchasedthe
ferogramis decimated.To avoidthe leakageproblem,we have
data for a previous study [Price and Sandwell, 1998].
designeda longer-derivativefilter using the Parks-McClellan
Moreover, the area was selectedbecausethe dry surfaceof the
filter designapproachas implementedin MATLAB Signal
Mojave Desertis ideal for retaininghigh correlationin repeatProcessingToolbox. The filter coefficientsand imaginary
passinterferometry.Five slaveimageswerealignedin range,
responseare shown in Figure 4. The derivative filter is 17
azimuth, and Doppler centroid to a single master image
pointslong (solidcurve,top) while the Gaussianfilter is only
(ERS2_3259) so interferogramscould be constructedfrom any
5 points long in range (dashedcurve). Figure 4 (bottom)
pair [Li and Goldstein, 1990]. The vertical and horizontal shows the gain for a theoretical derivative and the numerical
positionsof the set are shownin Figure3, andsix of the many derivative. The convolution of the Gaussian and derivative
possibleinterferometricpairs are listed in Table 1. Earth filtershas a peakresponseat a wavelengthof 50 m. The locaflattening(equations(A9) and (A10)) wasperformedon a rowtion of the peakcanbe adjustedby varying Crin (11) although
by-row basis to accountfor the changein baseline length the derivative filter limits the best resolution to 30-m wavealong the frame. Baselineswere computedas describedin
length. Note that to achievethesehigh resolutions, one must
AppendixB usingpreciseorbits providedby Delft University operateon the full-resolution ERS data. The phase gradient
[Scharroo et al., 1998].
was constructedby applying the operations given in (1).
After the filtering and differentiation the phase gradientswere
3.2. Design of Low-pass and Gradient Filters
decimatedby 2 pixels in range and 4 pixels in azimuth reflectInterferogramsformed from full-resolution SLC images ing the cutoff wavelengthsof the Gaussianfilter. Finally, we
contain significant phase noise, especially when the time eliminated phase gradient estimates where the phase rate
separation
betweenthe repeatandreferenceimagesis long or exceeded1.2 rad per pixel andwhere the correlation (A15) was
thereare disruptions
in the surfacefrom vegetation,moisture, less than 0.2. This eliminated areasof layover and temporal
or snow. Moreover, if the signal-to-noiseratio of the phase decorrelation,respectively. The three Tandempairs have only
decreaseswith decreasingwavelength, then the gradient a 1-daytime lag, and the correlation was generally high. The
operationwill amplify the shortest-wavelength
noise while correlationwas lower for the other three interferograms,espesuppressing
the longer-wavelength
signal. This will resultin cially in the southern part of the area that contains the
an overall noisy estimate of phase gradient. A Gaussian- vegetatedSan BernardinoMountains.
Table 1. Data Frames, Baseline Parameters, and Orbit Error
Reference
Baseline
Start/End
Repeat
Orbit
Error
Elevation
SatelliteOrbit
Year
Day
SatelliteOrbit
Year
Day
Length?
m
ERS1_21930
1995
268
ERS1_22932
1995
338
ERS2_3259
1995
339
ERS1_21930
1995
268
ERS2_3259
1995
339
ERS 1_22932
1995
338
ERS2_3760
1996
009
ERS 1_23422
1996
008
ERS1_21930
1995
268
ERS2_2257
1995
269
ERS2_3259
1995
339
ERS2_2257
1995
269
55.4
56.1
121.6
120.4
105.0
107.2
135.0
138.9
343.4
346.4
452.0
453.9
Angle?cz
91.2
91.2
-29.0
-28.9
-1.4
-1.5
-1.6
-1.6
2.0
2.0
-5.9
-5.8
B_
Range1mm
Azimuth7mm
18.0
-50
33
79.8
-42
37
97.7
41
45
125.6
36
39
326.6
40
-68
406.5
-46
-49
30,188
SANDWELLAND PRICE: STACKINGINTERFEROGRAMS
-117 ø 30'
-117 ø 15'
-117 ø 00'
-116 ø 45'
-116 ø 30'
-117 ø 15'
-117 ø 00'
-116 ø 45'
-116 ø 30'
35 ø 00'
34 ø 45'
34 ø 30'
34 ø 15'
34 ø 00' ,.
-117 ø 30'
ß
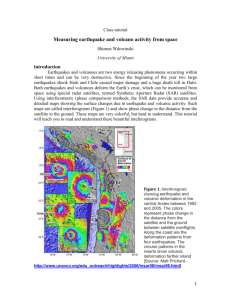
Figure 2. Shadedtopographyin Mojave Desertarea (100-m contourinterval). White box outlines areaof
ERS-1/2 SyntheticApertureRadar(SAR) frame2907 alonga descending
orbit. The Mojave River flows from
southwest
3.3.
Short
to northeast.
Wavelength
Coherence
Our initial objectiveis to designa low-pass filter that will
suppress noise but retain the signal at high spatial
wavenumberthat may become available after stacking many
interferograms. The repeat-track analysis method [Welch,
1967; Bendat and Piersol, 1986; Marks and Sailor, 1986] was
used to evaluate the signal and noise characteristicsof the
phasegradientdata as a function of spatial wavenumber. For
the analysis we selectedtwo interferograms generated from
four independentSAR images (i.e., rows 3 and4 of Table 1).
Considerthe range coherencefirst: the x componentsof the
phasegradientalong corresponding
rows (length 2048) of the
twointerferograms
areloaded
intovectors
st ands2,wheres2
is scaledby the ratio of the perpendicular
baselines.If therei s
no noise, the data vectors shouldbe equal to their common
signalS, but becauseof many factors, each vector has a noise
componentn• and n2. The model is
sl = S + nl
s2= S + n2
(12)
An estimateof the signal is the averageof the two x phase
segmentsS = [s• + s2]/2 while an estimate of the noise is the
difference
between
twox phase
segments
d = [n•- n2]•. Each
segmentof x phasedataplus their sumsand differenceswere
Hanning windowed and Fourier-transformed. Spectral
SANDWELLAND PRICE: STACKINGINTERFEROGRAMS
Landers
30,189
Frames
!
!
i
i
2OO
x - start frame
150
0 - end frame
IO0
5O
master
0
(3259)
•95-339
{3760)
0 x96'009
(21930)
•195-268
5O
(23422)
0x96-008
(2257)
•B95-269
IO0
150
2OO
I
0
,
I
100
I
200
I
300
I
400
I
500
Horizontal Baseline (m)
Figure 3. Positionsof ERS orbitsin relationto the masterorbit (ERS-2 3259). Year and day of year are also
provided. The crossesshow satellitepositionsat start of frame, while open circles show positions at end of
frame. Threepairsof SAR images are from the ERS-1/2 Tandemmission and have 1-day time intervals. For
our analysis we useda suite of perpendicularbaselinesranging from 18 m for 22923-21930 to 406.5m for
2257-3259.
estimatesfrom 350 independentrows were ensembleaveraged
to form smooth power spectra, cross spectra, and coherence
segments(only every eighthrow was analyzed). The range (x)
and azimuth (y) gradient data were treated separately. The
resultsare shown in Figure 5 where the signal power, noise
power, andcoherenceare plotted versusspatial wavenumber.
Note that to obtain the power in the phase rather than the
at a 42-m wavelength in range and an 84-m wavelength in
azimuth.Thusthefiltergainis quitehigh,>.75 overthe
coherent
portion
of thespectrum.
TheGaussian
filterwidths
couldbe increasedto suppressmore noise, but eventually We
would like to average many interferograms; thus we do not
want to eliminate signalsthat may emergeabove the noise at
high wavenumber.
phase
gradient,
oneshould
divideeachcurve
by (2/rk)
2. The
Of course,the interferograms
that we have selectedhave
derivative operation has no effect on the estimates of
coherence,and it provides a naturalmeansof "prewh"tening"
prior to Fourier analysis.
The signalpower(Figures5a and5b) decreases
rapidly with
increasingwavenumberin both range and azimuth reflecting
the power spectraof the commontopographicsignal. The
noisespectraincreasewith increasingwavenumber
between0
perhapsthe best signal-to-noisecharacteristicsavailable from
of 180 m. For comparison, the Gaussian filter has a 0.5 gain
raphy and earth deformation have red spectra while we have
ERSdatabecause
of the short time interval betweenimages
andthe ideal radarreflective properties of the Mojave Desert.
Both temporal and baseline decorrelationwill increase the
noise level, which will decreasethe spatial resolution. In
thesecasesa wider filter can be appliedto increasethe clarity
of the interferogram at the expense of spatial resolution
and0.01 m4 (100-mwavelength)
reflectingthe "whitening" [Gatelli et al., 1994]. The standardmeasure of correlation
providedby the derivativeoperation. At wavenumber
greater (equation(A15))reveals important spatial variations associthan0.01m-1,thenoisespectra
beginto flattenreflecting
the atedwith water, vegetatedareas,snow,etc. However, it should
Gaussianfilter. The coherence(Figures5c and 5d) reflectsthe be noted that the standardmeasureis an average of the coherence over the entire band that passedthrough the multi-look
SNR and provides an estimate of the resolution of the data in
both range and azimuth. In slant range the coherencefalls filter (Gaussian in our case); the level of correlation will
below 0.2 at a wavelength of 90 m (-230 m in groundrange) dependon the sizesof the azimuthandrangefilters appliedt o
while in azimuththe coherencefalls below 0.2 at a wavelength the interferogram. Many geophysical signals suchas topog-
30,190
SANDWELLAND PRICE: STACKINGINTERFEROGRAMS
range
0.5
0.5
60
40
20
0
20
40
60
lag (m)
I
I
I
ß
.'
I
I
I
ß
1.5
_
-
_
0.5
-- •••"
0.01
0.02
•
0.03
0.04
0.05
•-
0.06
wavenumber(l/m)
Figure 4. (top) Low-passGaussianfilter (dashedcurve)andderivativefilter (solid curve) applied to fullresolutioninterferogram.(bottom) Gain of ideal derivative filter (dottedcurve), 17-point convolution filter
(solidcurve),and Gaussianlow-passfilter followedby 17-pointderivativefilter (dashedcurve). The combined
filter has little loss for wavelengthsgreaterthan 100 m.
shownthat the noisespectrumis blue in terms of phasegradient (white in termsof phase).
ferogramto a differentaveragelevel and that the stackwould
contain these shifts. However, keep in mind the dramatic
suppression
of long wavelengthsby the derivativefilter. For
3.4. Stacking Phase Gradients and Topographic
example,a 50-mm orbit error over a 100-km framewill introRecovery
ducea DC offset in phase gradient of only 0.0050 rad per
Phase gradients from six interferograms were stacked as pixel, which is 100 timessmallerthan typical phasegradients
with topographyßFor an accuratestackit is impordescribedby (3). The suiteof baselinesdramaticallyincreases associated
the dynamicrange of ERS phase recovery over all types of tant that the cumulativebaselinelength accuratelyreflectsthe
terrain. The interferogram with the shortest perpendicular baselinesof the componentsusedin the stack, especiallyif
baseline (18 m)has almost complete spatial coveragewhile the cumulative baseline is short. This is one of the reasons
coverageof high-relief areasis poor for the longest-baseline why accurateorbital information is needed. Since we do not
interferogram (406 m). The cumulative baseline shown in unwrapthe phase of the individual interferograms,ground
Figure 6 illustratesthe editing associatedwith layover, high control information cannot be used to estimate the baseline
relief, standingwater, and agriculturalfields. The SAR image parameters[e.g., Zebker et al., 1994a].
The stacked range and azimuthal phase gradients were
ERS1_22932 was shifted by 5600 rows of raw SAR data with
respect to its interferometric pair(s); this is reflected in a unwrappedusing (10), which relies on complete phasecovershadedband along the top of the cumulativebaseline image age. From Figure 2 it is clear that this area contains large,
(Figure 6). Out of a possible cumulativebaseline of 1054 m long-wavelength components of elevation (phase) change
(white in Figure 6), there are very few areashaving cumulative between the low areas of the Mojave River in the north
baselineless than 200 m. Stackedazimuthal and range phase (-600 m)and the high areasof the San BernardinoMountains
gradients(Figures7 and 8, respectively)have nearly complete (2600 m)on the southeast. In addition, the cumulative
coverageanddo not show any discontinuitiesassociatedwith baselinein the ruggedareasof the San BernardinoMountains
dropoutsfrom the individual interferograms. One would is short and highly variable, making unwrappingthe phase
expectthat long-wavelengthorbit error would shift eachinter- difficult. Finally, and most troubling, areasof layover occur
SANDWELLAND PRICE: STACKINGINTERFEROGRAMS
azimuth
range
a 101
ß
,
30,191
b10 •
,
,
,
10o
100
ß
ß
0
C
I
0.005
ß
0.01
0.015
0
0.02
d
ß
I
0.8
0.8
c 0.6
0.6
o 0.4
0.4
0.005
ß
0.01
0.015
.
0.2
0.2
o
o
o
0.005
0.01
0.015
o
0.02
0.005
0.01
o.o15
wavenumber (l/m)
wavenumber (l/m)
Figure 5. The correlationbetweenphasegradientsfrom Tandeminterferogramsreveals the signal and noise
(a) rangeand(b) azimuthasa functionof wavenumberas well as the coherenceversuswavenumberfor range,
azimuth (c,d). The Tandeminterferograms(repeat interferogramsTable 1) have similar baselines. For
uncorrelated
noisea coherenceof 0.2 marks a signal-to-noiseratio of 1 andprovidesa good estimateof the
wavelengthresolutionof the data. Ground-rangeresolutionis 230 m while azimuthresolution is 180 m.
Stackingmay providebetterresolution,so we designfilters to cut wavelengthshorterthan -100 m from the
full-resolution interferogram.
on the east sidesof the mountainsand always have negative
gradientfor this imaging geometry. Initially, we set these
unknowngradientsto zero andproceedto unwrapthe phase' of
course,this introducesisolated dipolar artifacts [Zebker and
Lu, 1998]. We then differentiate the phase to recover new
estimatesof phasegradientin areasof layover and proceedto
unwrapagain;after severaliterations the procedureconverges
The vertical accuracy and horizontal resolution of the
recoveredtopography are best establishedby examining a
mat• exactly matches the eeometrv of the master SAR image.
curve). Since the width of the cut is less than the cutoff wave-
known
small-scale
structure.
Oro
Grande
Wash
in
the
southwestcomer of the region provides a good test (Figure
10). The Wash is 25 m deeperthan the surroundingsloping
surface (Figure 11), [U.S. Geological Survey, 1956]; our
topographicrecovery showsa similar depth. The Wash is
[Ghiglia and Romero,1994]. Figure9 showsthe topography crosscutby the SouthernPacific Railway track, which (Figure
derivedfrom the unwrappedphase (equation (A14)) for the 12) runsnearly parallelto the local contours(Figure 11). The
entire area with 100-m contour interval (2027-m peak to topographyderived from the ERS data showsthe railway cuts
troughamplitude).Someproblemsare evidentby noting that throughthe elevated surfacesurroundingthe Wash having a
the Mojave River doesnot alwaysflow downhill. It is more depth of 5 m and a width of 60 m. The railway is elevated
difficultto assess
the effectsof layover. This entire approach where it crosses the Wash, and one can see the contours are
is experimental;nevertheless,the results are quite encourag- elevatedby -5 m. The sumof the contoursof cut and elevation
ing, andwe expectthat the long-wavelengthproblemscanbe is only 10 m while it should be 25 m. The discrepancyis
solved by removing the phase gradient due to known explainedbecausethe Gaussianfilter has a gain of -0.4 at a
topographicvariations(1000-m postingswouldbe adequate). wavelengthof 60 m.
The cut was crudelymeasured
using a carpenter'stape; the
Thenunwrapthe residualphaseandaddback the phasedueto
the knowntopography.This overall approachenablesone to depthof the cut is -9 m, and the width is -32 m, and from the
improvethe resolutionand accuracyof the topographicphase U.S. Geological Survey (USGS) map we can infer the
and alsoto ensurethat the geometryof the topographicphase topographic trend surroundingthe cut (Figure 13, dashed
30,192
SANDWELLAND PRICE: STACKINGINTERFEROGRAMS
110 -
100 -
0
10
20
30
40
km
50
60
70
80
90
Figure 6. Cumulativebaseline (range) showsthe sum of the perpendicular
baseline estimatesthat are
availablefor stacking.Maximumbaselineof 1050m is whitewhile zero baselineis black. The shadedpatch
alongthe top reflects incomplete data from the 22932 ERS-1 frame. Other shadedareasreflect decorrelation
dueto vegetation,standingwater, andlayover. Cumulativebaselineis usedto normalizethe stack(equation
(3)) as well as to weightthe iterativephaseunwrappingfor topographic
recovery.
length of the low-passfilter, its shapeis unimportant,and a
Gaussianfilter can be applied to the measuredprofile for
comparison with the topography recovered from ERS
interferometry(Figure 13, dottedcurve). The match is quite
good,suggestingthat there are no blundersin our processing.
Moreover,the 2-m scatterabout a straight-line trend suggests
that this is the noise level of the relative topographic
recoveryin this rather flat area.
It is interesting to note that this narrowrailway cut has a
clearerphaseexpressionthan any of the freewaysnearby or
eventhe CaliforniaAqueduct. Examinationsof the backscatter
amplitudereveal that railroad tracks are consistently radar
bright while nearbyroadsare radardark. The brightnessis
unrelatedto the orientation of the track with respectto the
radarillumination direction. Why are these tracks so reflective? The answeris thatthe gravelof the railway bed consists
SANDWELLAND PRICE: STACKINGINTERFEROGRAMS
30,193
11o
lOO
9o
8o
7o
6o
50
4o
3o
2o
lO
0
10
20
30
40 km 50
60
70
80
90
Figure 7. Stackedphasegradientin azimuth(blackareais -0.15 rad per pixel, andwhiteareais +0.15 radper
pixel) appearsas the topographyilluminatedfrom the north.
of chunksthat are typically >50 mm across. The C band ERS
radarhasa 56-mm wavelength,so the enhancedreflectivity is
due to Bragg scatteringfrom the gravel. The overall width of a
gravel railway bed is only 10 m, so even this small area can
providehigh backscatter. This may have implicationsfor the
designof low-costradar reflectors.
3.5.
Orbit
Error
individualinterferogramand the stack as given in (4). The
averageof the phasegradientdifferencein range (azimuth)is
the slope of the orbit error across(along) the frame. The
integralof this slope provides an estimateof orbit error, and
thesenumbersare given in Table 1; errorsare typically 40 mm
over a distanceof 100 km correspondingto a slope error of
0.4 grad. This maps into a perpendicularbaseline error (H.
Zebker, personal communication, 1996; http://wwwee.stanford.edu/---zebkeff)of-360
mm, which is consistent
The relativeorbit errorof eachinterferogramwasestimated with, although somewhat larger than, the estimated crossby computing the differencein phase gradient between the track orbit error of 300 mm for uncorrelatedrepeat orbits
30,194
SANDWELLAND PRICE: STACKINGINTERFEROGRAMS
11o
lOO
9o
8o
7o
6o
,.•
50
4o
3o
2o
lO
o
lO
20
30
40 km SO
60
70
80
90
Figure 8. Stackedphasegradientin range appearsas topographyilluminatedfrom the west. Note that in
ruggedareassuchas the SanBernardinoMountainsin the south, the slope distributionis asymmetricbecause
the radarilluminatesthe easternsideof the mountains
at a steeplook angleof 20ø. This asymmetry,coupled
with regionsof completelayover,posesa significantproblemin phaseunwrapping.
[Scharrooet al., 1998]. While we are attributingthis slope in
the residualinterferogram to orbit error, a constant zenith
delay will alsoproducea uniform slopein range [Zebker et al.,
1997]. Similarly, a change in zenith delay along the track
will mimic a change in parallel baseline component of the
orbit error. Thus one cannot distinguishbetween orbit error
and long-wavelengthpropagationdelay. As noted in Table 1,
the distancebetween the referenceand repeat orbits changes
monotonically along the frame by up to 4 m. Therefore one
mustaccountfor thesechangesin baselinewhile applying the
Earth-flatteningcorrection(equation(A9)).
One of the advantagesof the phase gradient approachfor
changedetectionis that even long-baseline interferograms
can provide accuratechange measurementsas long as the
correlationremainshigh over the area. The exampleshown in
Figure 14 is a ERS Tandeminterferogram (i.e., 1-day time
SANDWELLAND PRICE: STACKINGINTERFEROGRAMS
]
.
..i....
i
i
30,195
,
11o
100
8o
6o
50-
4o
3o
10'
;
10
20
30
40 km $o
60
70
80
90
Figure 9. Unwrappedphase scaledinto relief (equation(A14)) and contouredat 100-m intervals. At long
wavelengthsthe cumulativedropoutson the sidesof the mountainsfacing the radarintroducelong-wavelength
errorsin the unwrappedphase. On smallscalesthe relief estimatesare quitedetailedand accurate.
span) having a perpendicularbaselineof 326 m (ERS2_2257
minus ERS1_21930). This unwrappedphase reveals about
70 mm of orbit error and other shorter-wavelengtherror of
--10 ram. There is a wave-like signatureat a range of 65 km
andan azimuthof 40 km that representscontaminationof the
stack by atmospheric waves as discussedin section 3.6.
Indeed,this contaminationintroduceslarge (-30 m) wave-like
errorsin our estimatesof topography (total) phase estimate
above. To reducethese errors, many more interferograms
shouldbe averaged(>20).
3.6.
Atmospheric
Waves
In additionto orbit error, the six change interferograms
reveal other phasedelays that are presumablydue to atmospheric and ionospheric effects. The three interferograms
30,196
SANDWELLAND PRICE: STACKINGINTERFEROGRAMS
Figure 10. Topographyof Oro GrandeWash (seewhite box in Figure 9) at a 5-m contourinterval. Crosses
are spacedat 1000-m intervals. White line marksa measuredprofile shownin Figure 13. The overall depth of
the Washis 25 m. The SouthernPacificRailway trendsnorthwestthroughthe centerof the image and appears
as a 5-m-deeptroughin slopingsurfacesurroundingthe Wash. The track is elevatedwhere it crossesthe Wash.
formed
from
the
ERS-2
SAR
orbit
number
3259
frame
(December4, 1995; 1828 UT) all display prominent wave-like
signatureshavingpeak to troughamplitudesof 5-15 mm and a
wavelengthof 5 km. To confirm the date of these featuresand
establishan unbiasedestimateof their amplitude,we averaged
the three interferograms not containing ERS2_3259. The
wave-like featuresare most apparent in the Tandem interferogramERS1_22932 minus ERS2_3259 (Figure 15). The
waves are weakestin the longest-baseline
interferogram (406m ERS2_2257 minus ERS2_3259), suggestingthat this inter-
ferogram is too noisy to adequatelyresolve these small
features. We attempted to stack the three residual interferogramsusingthe coherence-weighting
schemegiven in (5).
However,the long-wavelength
trendsinteractedwith the gaps
in each interferogram to create artificial long-wavelength
effects.
To check that this is an atmospheric effect, we have
searchedthe National Oceanic and AtmosphericAdministration (NOAA) archivesfor advancedvery high resolutionradiometer(AVHRR)images on that date. The closest image in
SANDWELLAND PRICE: STACKINGINTERFEROGRAMS
30,197
Figure 11. Contourmapof Oro GrandeWash(USGS,1956; 20-foot contours)showsintersectionwith
railwaycutandfill. This shouldbe compared
with the interferometric
topographicrecoveryshownin Figure
10. Profile A-A' is 1000 m long.
time (2045 UT)contains
wave-like features in Nevada,
althoughthey are not pronouncedin the areajust north of the
San Bernardino. Nevertheless, we believe that the wave-like
featuresare atmosphericgravity waveson the lee of the San
BernardinoMountains [Holton, 1972, pp. 172-179]. These
wavesmay have movednortheastwardduringthe 2-hour time
spanbetweenthe SAR imageandthe AVHRR image. Another
possibilityis that the waveshave no visible signaturein the
AVHRR data. Suchfeatureshave been seenpreviouslyin other
interferograms[Tarayre and Massonnet,1996].
4. Limitations
and Unresolved
Issues
These initial results suggest that the phase gradient
approach
will be a goodway to treat ERS interferograms
when
manyrepeatframesare available. While this report outlines
the theory, the applicationspresentedhere are quitelimited
anddo not alwaysdemonstrate
the advantages
claimedin the
introduction. To better understand the approach, the
following typesof researchneed to be completed:
1. Analyze perhaps>20 repeat images instead of just 6.
With only six interferogramsone cannot use the stack to
begineditingandweedingout the bad estimates. In a similar
study,where repeat satellite altimeter profiles were stacked,a
high level of confidencewas gainedwhen 16 repeatsbecame
available, and dramatic improvement was seen when 40
profiles were stacked[Yale et at., 1995].
2. Remove as much known signal as possible before
filtering the interferogram;this could be done using a lowresolution digital elevation model [Massonnet et at., 1994].
The expected benefits are a more accurate estimate of
correlation [Werner et at., 1996], smaller errors due to
numerical differentiation, retention of more high phase rate
data in the mountains, and more accuratephase unwrapping
especiallyat long wavelengthandnearthe edgesof the area.
3. Furtherinvestigatethe effectsof layover on topographic
recovery from stacked phase gradients. Layover is a
30,198
SANDWELLAND PRICE: STACKINGINTERFEROGRAMS
Figure 12. Photograph of cut and fill at Oro GrandeWash. (top) looking southeastacrossWash with
highway 15 in backgroundand (bottom)looking west at railway fill.
particularlydifficult problembecauseit always eliminatesdata
of the samesign; this plaguesthe Fourierphaseunwrapping
approach.
4. Design a poststack filter that reflects the noise of the
residualinterferogram. The coherenceanalysis shown in
Figure 5 suggeststhat even very noisy interferogramswill
containsomeinformation at long wavelengths. Perhapsthis
can be recoveredafter careful removal of the topographic
signaturefollowedby a low-passfilter.
5. Explore a long time seriesof differenceinterferograms
to isolate the three types of temporalsignals (i.e., single
event, stepwiseevent, and secularchange).
6. Finally, given that there will always be residual orbit
and atmosphericerror at the centimeterlevel and that we would
like to observe changes at the millimeter level, one should
explore the best approach to using GPS measurementsof
grounddeformation and atmospheric-ionosphericdelay to
correct the interferograms.
SANDWELL
ANDPRICE:STACKING
INTERFEROGRAMS
30,199
A 6
I
500
400
300
200
1O0
0
1O0
distance(rn)
200
300
400
500
Figure13. ProfileA-A' across
railwaycut. Solidcurveis fromstacked
interferogram,
dashed
curveis a crude
measurement
of the cut, anddottedcurveis the measured
topographyconvolvedwith Gaussianfilter usedto
reduce noise in raw interferograms.
atmosphericdelay at a 5-km wavelength. Since the
troposphericperturbationshave a red spectrum[Goldstein,
We havejustscratched
thesurfaceon usingphasegradients 1995], the erroris probably larger at longer wavelengths. If
for recoveringtopographyand surfacechangefrom SAR this erroris stationaryin spaceand in time, then it can be
interferometry. The theoreticaldevelopmentof the phase reducedas the squareroot of the numberof individual SAR
gradientandtheir sumsanddifferences
are straightforward.imagesusedin the stack. Sincethe primary error sourcesare
Carefullydesignedlow-passand gradientfilters mustbe concentrated
at wavelengthsgreaterthan a few kilometers and,
applied
to thefull-resolution
interferogram
in orderto obtain as we show, the interferogramscan resolve features with
unbiasedestimatesof gradient at the shortest possible wavelengths
greaterthan200 m, InSAR will providethe most
wavelength.Preciseorbitsareneeded
to removemostof the usefulinformationin the 200- to 20,000-m wavelengthband.
long-wavelength
phasegradientas well as to estimatethe It wouldbe nice to have severalyears of repeatimages to gain
perpendicular
baselinescale factorsthat are neededfor someconfidencein the overall approach
5. Summary
stacking
interferograms.
In addition,thepreciseorbitscould
be usedto automatetheentireprocessing
sequence,
but thereis
still a problemwith the timing accuracy
of the ERS data Appendix A
(Appendix B).
Phaseunwrappingis still a major problem,which we
believeis best solvedby first removingall knownsignals
[Massonnet
et al., 1996] from the phasemaps and then
stackingas muchdataas possibleto providecomplete2-D
estimates
of phasegradient;
we still donot knowhowto deal
with areasof layover. The largestcomponentof orbit error
A1.
Phase
Gradient
Due
to Earth
Curvature
Here we follow the derivation of Rosen et al. [1996] and
Joughinet al. [1996] to highlight the relationshipbetween
phasegradientin range and the topographyof the curved
Earth.Unlike previouspublications,
we explicitly includethe
effects of Earth curvature. This is evident in the factor p/c,
in (A7) and(A8) aswell asthefactorro/c,which
appears
asa trendacrosseachinterferogram,
andin theory, whichappears
appears
in
(A13)
and (A14). The geometryof repeat-pass
justa fewGPScontrol
pointscouldbe usedto correct
it. On a
smaller scale we show examplesof 15 mm of residual interferometryis illustratedin FigureA1 (top). The phase
30,200
SANDWELLAND PRICE: STACKINGINTERFEROGRAMS
lOO
8o
6o
4o
2o
o
20
40
60
80
Figure 14. Unwrappedphasegradientdifferencefor interferogramERS2_2257 minusERS1_21930 having a
perpendicularbaseline of 327 m (5-mm contour interval). The stackedphase gradient was scaledto this
baselineandremovedfrom this interferogram.Unwrappingrevealsa NE-SW trendthat is related to orbit error
and perhapslarge-scaleatmospheric-ionospheric
delays.
difference• to a point on the groundis relatedto the range
difference60:
O=4,p
reference-passrange, the baseline length B, and the baseline
a:
(,O
+6,0)
2=,02+B2-2pB
sin(O-
(A2)
Since6p << p, we have
= •6,0
B2 B sin(
2p
and sinceB << p, the parallel ray approximationyields
(A4)
The derivativeof the phasewith respectto range is
where/• is the wavelengthof the radar.The law of cosines
providesthe relationship among the repeat-passrange, the
orientation
•=-4•rBsin(O-a)
(A3)
0O--4•rB
cos(Oo000
OP /•
•
(A5)
Thisphasederivativedepends
on two terms,the perpendicular
component of the baseline B•_ = Bcos(O-a) and the
derivativeof look anglewith respectto ranget)0/t)p. The
perpendicular
baselinevariesslightlywith look angleacrossa
typical SAR image. The changein look angle usually
increases
with range,so t)0/t)p> 0. However,whenthe local
terrainslopeexceeds
thelook angle,an increase
in look angle
doesnot producea corresponding
increasein range. This is
the layovergeometrywhereo•O/o•p
<= 0.
Now considerthe normal phase gradient due to the local
curvature
of theEarth(FigureA1, bottom). Let robe the local
SANDWELLAND PRICE: STACKINGINTERFEROGRAMS
30,201
8O
6O
4O
2O
0
20
40
60
80
Figure 15. Unwrappedphasegradientdifferencefor interferogramERS1_22932 minus ERS2_3259 having a
perpendicularbaseline of 97 m. We determinedthat 3259 was contaminatedwith atmosphericwaves, so a
stackof three interferogramsnot containing3259 was removed. The waveshave characteristicamplitudesof
10-15 mm and wavelengthof 5 kin.
Earth radius(i.e., the spheroid),0 be the look angle, p be the
rangeto the spheroid, and c be the distancefrom the satellite
to the centerof the Earth. Again, by the law of cosineswe find
[Joughinet al., 1996]
expressionfor total phaseversusrange:
<p
=-4•B[(1-/72)1'2cos
(x+//sin
ix]
(A9)
Equation(A9) is usedto form the Earth flattening correction.
The interferogram
is the productof referenceC• and repeatC2
single-look complex images [Li and Goldstein, 1990]; it
provides an estimate of the total phase difference •b• - •b2.
Take the derivativeof r/with respectto p to determineo•0/o•p.
Removal of the largest phase term yields the real and
After a little algebraand using(A5), we find an expressionfor
imaginary parts of the Earth-flattenedinterferogramthat are
the phasegradient:
neededfor the computationof the phase gradient (equation
r/-cos0(c2
+2pc
p2_
ro
2)
(A6)
(1)):
8p
Ap
cos/o-//coso-/
sin0
After a little more algebraone arrives at an expressionfor the
phase gradient in terms of the range, which has a slightly
faster executionon a computer,
R + il = C1C• e-•4•
Precise orbit information (Appendix B) is required to
determine
the radius of the reference orbit
c as well
as the
baselineparametersB and o•. The local radiusof the spheroid
(ro)dependsonly on latitude
8p __
Ap
l-r/r/2)l/2
0_•.0
4•rB
cos
ct
+sin
ctr/-•-(A8)
wherer/is givenin (A6). Using (A4), one can also derivean
(A10)
ro(rp)
=(cøs2(p
sin2rp
/-1/2
+
a2
b2 ]
(All)
wherea andb arethe equatorialandpolarradii,respectively.
30,202
SANDWELLAND PRICE: STACKINGINTERFEROGRAMS
where 0o is the look angle to the spheroid (equation(A6)).
The mapping of total unwrappedphase into elevation as a
functionof range is
reference
(r-ro)=-Apc sin0o (qSq5o) (A14)
4tcBrocos(0o- o0
One shouldrememberthat the unwrappedinterferogramdoes
not providethe completephasedifference•p- •Posince there is
an unknownconstantof integration. Since the mapping from
phase to topography varies significantly with range, an
appropriateconstantshouldbe addedto the unwrappedphase
or a moreaccuratesolutionto setthe local earthradiusro to the
averageradiusof the topographyin the frame.
A3.
Long
Baselines
A number of studies show that the correlation
between two
SLC imagesfalls to zero as the baselineis increasedtoward the
critical baseline [Li and Goldstein, 1990; Zebker and
Villasenor, 1992; Werner et al., 1992; Gatelli et al., 1994].
o p
While baseline decorrelation provides an upper bound on
baseline length, we are concernedthat the correlation given
by
y= [(c1c•l
((C1C
•Xc2
C•))1/2
(A15)
is a poor estimator of decorrelationof the surface,especially
in regions of high phasegradient [Werneret al., 1996]. To
computethe actualdecorrelationof the surface,one must first
removeall known phase gradientsdue to baseline geometry
andtopography. Equation(A5) is the generalexpressionfor
the phasegradient. For a flat earthwherethe look angleequals
the incidenceangle,the phasegradientvariesin a smoothand
predictablemanner acrossthe scene:
Figure A1.
(top) Geometry for interferometry above
sphericalEarth model. (bottom) A sphericalEarth model is
usedin all of the interferometryequations.
A2. Mapping
Phase into Topography - Spherical
Earth
One can use this formulationto relate Earth-flattenedphase
to topography. The actual radiusof the earth (r) is usually
greaterthan the radiusof the spheroid(r,,), and this difference
is geometricelevation. (Later we need to subtractthe local
geoidheightto get true elevation.) The phasedue to the actual
topographycanbe expandedin a Taylor Seriesaboutro:
OO_-4tr B cos(O-
3p •p
(A16)
tan0
(Note this is (A7) in the limit as c >> p.) Now considera
perpendicular
baselineBc suchthat the phase rate acrossthe
imageis 2tr rad per pixel. If we assumethat the pixel contains
a uniformdistributionof randomscatters,then,with respectto
the phaseof the scattersin the referenceimage, the phaseof
the scattersin the repeatimage will display -2n phasedelay
acrossthe pixel, and the pixels will be uncorrelated. The
familiar expressionfor this critical baselineis
Bc =
cp(r)
=cp(ro)
+•)•--•rO
rO)
(r-ro)
+1020
(ro)
(r-ro)
2+...
(A12)
tan0
(A17)
2Ap
2 •)r 2
Using (A4) and (A6), one can calculate the first two
derivatives.
It turns out that the second derivative
arP
(ro)
=-4trro
Bcos
(0o-O0
3r
•pc
sin0o
Next assume that the baseline is one-half the critical value,
is about
(r- ro)/r timesthe first derivative(i.e., 2.7/6371 for our area),
so we only needto keepthe first two terms in the series. The
first term is (A9) while the secondterm is
wherezip is the pixel width, which is relatedto the bandwidth
W of the radarchirpzip < c/2W.
so the phaserate acrossthe image is tr rad per pixel, and that
thereis no surfacetopography.When one computesthe correlation by averaging the interferogram over range pixels as
describedin (A15), adjacentpixels will have oppositephase,
so the numeratorin (A15) will sum to near zero. If the Earthflattening correction is applied prior to computationof the
(A13)
SANDWELLAND PRICE: STACKINGINTERFEROGRAMS
correlation, then the numerator in (A15) will return to the
correct value of 0.5. Next consider a long-baseline interferogramwith ruggedterrainso the slopeis high and the magnitude of the phase gradientcan approachn:rad per pixel; so
again, the correlation (equation(A15)) will be low [Gatelli et
al., 1994]. In this case, one could improve the estimatedcorrelation by removing the phase due to the topography.
Werner at al. [1992] have shownthat for topographicrecovery
the trade-off betweenincreasingphase amplitudewith increasing baseline and decreasingcorrelation with increasingbaseline leadsto an optimum baseline which is about one-half of
the critical
baseline.
Because
the
ERS
satellites
were not
designedfor interferometry,even this baseline length posesa
numberof practicalproblems.
30,203
images,but the timing accuracyof the radarechoesmust be a
fraction of a millisecond. Azimuth alignment of the repeat
orbit with respect to the reference orbit is given by two
parameters,the numberof echoesto shift the repeat orbit at
the start and end of the frame (Yshift)'Again, let s(t•) be the
vector position of the satellite at the start of the frame of the
referenceorbit and S(t2) be the closest point on the repeat
orbit. The Yshift
is simply
Yshift
= (t2- to)PRF
(B7)
where tois the time at the start of the repeat frame and PRF is
the pulse repetition frequency. The shift at the end of the
frame is computedin a similar fashion,and this could be recast
as a stretch. Note that to achieve one-fourth pixel alignment
(-1 m) for ERS, the relative timing of the radar echoesmust be
Appendix B: Precise Orbit, Baseline Estimation, accurate
to 1/7000 ms-•, which is 0.15 ms. It is unclear
and Image Alignment
whetherthe time recordedon the data tapes refers to the clock
Precise baselines are computed from ERS-1/2 orbits
providedby Scharrooet al. [1998]. These orbits have radial
accuracyof 70 mm and cross-track accuracyof 210 mm, so
overall baseline accuracy is better than -300 mm for
uncorrelatedorbit error. Repeat orbits are never exactly
parallel, so one must also account for the change in the
baselinefrom the startto the end of the flame(s). Let s(t•) be
the vector position of the satellite at some point along the
referenceorbit. To calculatethe baseline, we simply search
the repeat orbit for the closest approach s(t2). The total
baseline length is
B =Is(t2)- S(tl)l
(B1)
the vertical component of the baseline B v is the radial
projection of B,
on board the spacecraftor to the time that the data were
collectedat the downlink site. While the difference is only 310 ms, the spacecraftwill move 20-70 m duringthis interval,
making subpixelalong-trackalignmentdifficult.
Similarly, the range alignment can be determinedby the
parallel componentof the baselineat the near range and far
range. Let 00 be the look angle in the near range; then the
range shift is
Xshift=
Bsin
(00-o•)
(B8)
Ap
whereAp is therangepixelwidth. The shiftat the look angle
of thefarrange(Of)canalsobe computed,
andthis couldbe
recastas a stretchparameter.
Acknowledgments.
This work benefitedfrom careful reviewsby
ßS1
BV=(S2Sl) [•ll
(B2)
Toulouse France) as well as from discussionswith Bernard Minster
(SIO), Paul Rosen(JPL), and RobertHall (SAIC). The decomposition
of thevectorfieldintopolloidalandtorroidalcomponents
wassuggested
and the horizontalcomponentis
BH=+(B2- BV2)
1/2
(B3)
where the sign of the horizontal componentmust be deduced
from the differencein the longitudesof the referenceand the
repeat orbits in relation to the look direction. Finally, the
baseline angle o•is
I(Bv
I
=tan•,•mm!
Howard Zebker (Stanford University) and Didier Massonnet(CNES,
by Robert Hall. Parts of the Stanford/JPLsoftware were used to
developour processingsystemand saved perhapsyears of software
development.Much of thephasegradientand stackingwas performed
with the GIPS systemwritten by Peter Ford at MIT. The MATLAB
SignalProcessing
Toolboxwas usedto designthe derivativefilter and
assessspectralcoherence. SAR data were providedby the European
Space Agency through Radarsat International. The research was
fundedby NASA - HPCC/ESSCAN, the National ScienceFoundationInstruments
andFacilitiesProgram,andNASA - SolidEarthand Natural
Hazardsprogram. A SparcStation
Ultra 30 usedfor data processing
was purchasedwith funds from NASA - Centers for Excellence in
(B4) RemoteSensing.
Theparallel(Bll)andperpendicular
(B_c)
components
of the
baselineare given in the following equations,respectively:
References
Afraimovich, E.L., A.I. Terekhov, M. Y.. Udodov, and S.V. Fridman,
Refractiondistortions
of transionospheric
radio signalscausedby
changesin a regular ionosphereand by travelling ionospheric
Bll=Bsin
(0-o•)
disturbances,
J. Atmos.Terr. Phys.,54(7/8), 1013-1020, 1992.
(B5) Bendat,
J. S., and A. G. Piersol, Random Data Analysis and
B_t_:
Bcos
(0-o•)
(B6)
where 0is the look angle (17ø-23ø for ERS).
The
perpendicular
baselineis usedto scalethe phasegradientsto a
commonfactor(equations(2) and (3)).
The preciseorbit informationcan also be usedto align the
MeasurementProcedures,2nd ed., JohnWiley, New York, 1986.
Curlander, J.C., and R.N. McDonough, Synthetic Aperture Radar:
Systems
and SignalProcessing,JohnWiley, New York, 1991.
Dixon, T., et al., SAR intereferometryand surfacechange detection,
RSMASTech.Rep.95-003, 97 pp., JetPropul.Lab., Pasadena,Calif.,
1995.
Fujiwara, S., P. A. Rosen, M. Tobita, and M. Murakami, Crustal
deformationmeasurementsusing repeat-passJERS 1 synthetic
30,204
SANDWELLAND PRICE: STACKINGINTERFEROGRAMS
aperture radar interferometrynear the Izu Peninsula,Japan, J.
Geophys.Res., 103(B2), 2411-2426, 1998.
Gabriel, A.K., R.M. Goldstein, and H.A. Zebker, Mapping small
elevation changes over large areas: Differential radar
interferometry,J. Geo_phys.
Res.,94(B7), 9183-9191, 1989.
Gatelli, F., A.M. Guarnieri, F. Parizzi, P. Pasquali,C. Prati, and F.
Rocca, The wavenumbershift in SAR interferometry,IEEE Trans.
Geosci RemoteSens.,32(4), 855-865, 1994.
Ghiglia, D.C., and M.D. Pritt, Two-DimensionalPhase Unwrapping;
TheoryAlgorithms,and Software,JohnWiley, New York, 1998.
Ghiglia,D.C., andL. A. Romero,Robusttwo-dimensional
weightedand
unweightedphaseunwrappingthatusesfast transformsand iterative
methods,J. Opt. Soc.Am. A Opt. Image Sci., 11, 107-117, 1994.
Goldstein, R.M., Atmospheric limitations to repeat-track radar
interferometry,Geophys. Res.Lett., 22(18), 2517-2520, 1995.
Goldstein, R.M.,
H.A.
Zebker,
and C.L. Werner,
Satellite radar
interferometry:Two-dimensionalphase unwrapping,Radio Sci.,
Press,W. H., S. T. Teukolsky,W. T. Vetterling, and B. P. Flannery,
NumericalRecipesin C, 2nded.,CambridgeUniv. Press,New York,
1992.
Price, E., and D. T. Sandwell, Small-scale deformation associatedwith
the 1992 Landers, California, earthquakemapped by synthetic
apertureradar interferometryphasegradients,J. Geophys.Res.,in
press,1998.
Resnick,R., andD. Halliday,Physics,JohnWiley, New York, 1966.
Rosen,P.A., S. Hensley,H.A. Zebker, F.H. Webb, and E. Fielding,
Surface
deformation
and coherence
measurements
of
Kilauea
Volcano, Hawaii from SIR-C radar interferometry,J. Geophys.
Res., 101(ElO), 23,109-23,125, 1996.
Scharroo, R., P. N. A.M.
Visser, and G. J. Mets, Precise orbit
determination
andgravityfield improvement
for theERS satellites,J.
Geophys.Res., 103(C4), 8113-8127, 1998.
Tarayre, J., and D. Massonnet, Atmospheric propagation
heterogeneitiesrevealed by ERS-1 interferometry,Geophys.Res.
Lett., 23(9), 989-992, 1996.
23(4), 713-720, 1988.
Holton,J. R., An Introductionto Dynamic Meteorology,Academic, San
U.S. GeologicalSurvey,BaldyMesaCalifornia,topographic
map, in 7.5
Minute TopographicSeries,Denver, Colo., 1956.
Diego,Calif., 1972.
Hunt, B.R., Matrix formulationof the reconstructionof phase values Welch, P. D., The use of the fast Fourier transform for the estimation of
from phasedifferences,J. Opt. Soc.Am., 69, 393-399, 1979.
power spectra: A methodbased on time averaging over short,
Joughin,I., D. Winebrenner,
M. Fahnestock,
R. Kwok, and W. Krabill,
modifiedperiodograms,
IEEE Trans.Audio Electroacoust.,15, 7073, 1967.
Measurement of ice-sheet topography using satellite-radar
interferometry,J. Glaciology,42, .10-22,1996.
Werner, C.L., S. Hensley, R.M. Goldstein, P.A. Rosen, and H.A.
Zebker, Techniquesand applicationsof SAR interferometryfor
Kaplan, W., Advanced Calculu&2nd ed., Addison-Wesley,Reading,
Mass., 1973.
ERS-I: Topographic mapping, change detection, and slope
measurement,
paperpresented
at FirstERS-1 Symposium:Spaceat
Li, F.K., and R.M. Goldstein,Studiesof multibaselinespaceborne
the Service of our Environment,Europ. Space Agency, Cannes,
interferometricsyntheticaperture radars, IEEE Trans.Geosci. and
France, 1992.
RemoteSens.28(1), 88-97, 1990.
Madsen,S.N., H.A. Zebker, and J. Martin, Topographicmappingusing Werner, C.L., S. Hensley, and P. A. Rosen, Application of the
interferometric correlation coefficient for measurement of surface
radar interferometry:Processingtechniques,IEEE Trans. Geosci.
RemoteSens.,31(1), 246-256, 1993.
change,EosTrans.AGU, 77(46),Fall Meet. Suppl.,F49, 1996.
Marks, K. M., and R. V. Sailor, Comparisonof Geos-3 and Seasat Yale, M. M., D. T. Sandwell,andW. H. F. Smith,Comparison
of alongtrack resolution of stacled Geosat, ERS-1 and TOPEX satellite
altimeterresolutioncapabilities,Geophys.Res. Lett., 13(7), 697-700,
1986.
altimeters,J. Geophys.Res.,100, 15117-15127, 1995.
Massonnet,
D., andK.L. Feigl, Satelliteradarinterferometric
mapof the Zebker, H.A., and R.M. Goldstein, Topographic mapping from
coseismic deformation field of the M = 6.1 Eureka Valley,
interferometricsyntheticaperture radar observations,J. Geophys.
Californiaearthquakeof May 17, 1993, Geophys.Res. Lett., 22(12),
Res., 91(B5), 4993-4999, 1986.
1541-1544, 1995a.
Zebker, H.A., and Y. Lu, Phase unwrappingalgorithmsfor radar
Massonnet, D., and K.L. Feigl, Discrimination of geophysical
interferometry:residue-cut,leastsquares,and synthesisalgorithms,
phenomenain satelliteradar interferograms,Geophys.Res. Lett.,
J. Opt. Soc.Am., 15(3), 586-598, 1998.
22(12), 1537-1540, 1995b.
Zebker, H.A., and J. Villasenor, Decorrelation in interferometric radar
Massonnet, D., and T. Rabaute, Radar interferometry: Limits and
echoes,IEEE Trans. Geosci.RemoteSens.,30(5), 950-959, 1992.
Zebker, H.A., S.N. Madsen, J. Martin, K.B. Wheeler, T. Miller, Y. Lou,
potential,IEEE Trans.Geosci.RemoteSens.,31(2), 1993.
G. Alberti, S. Vetrella, and A. Cucci, The TOPSAR interferometric
Massonnet,D., M. Rossi,C. Carmona,F. Adragna, G. Peltzer, K. Feigl,
and T. Rabaute,The displacementfield of the Landersearthquake
radartopographic
mappinginstrument,IEEE Trans.Geosci.Remote
Sens.,30(5), 933-940, 1992.
mappedby radarinterferometry,
Nature, 364(8), 138-142, 1993.
Massonnet, D., K. Feigl, M. Rossi, and F. Adragna, Radar Zebker, H.A., P.A. Rosen, R.M. Goldstein, A. Gabriel, and C.L.
interferometricmapping of deformation in the year after the
Werner, On the derivationof coseismicdisplacementfields using
Landersearthquake,
Nature,369(19), 227-230, 1994.
differential radar interferometry:The Landers earthquake, J.
Massonnet, D., P. Briole, and A. Arnaud, Deflation of Mount Etna
Geophys.Res.,99(B 10), 19,617-19,643, 1994a.
monitoredby spaceborneradar interferometry,Nature, 375, 567Zebker, H. A., T.G. Farr, R.P. Salazar, and T.H. Dixon, Mapping the
570, 1995.
world's topographyusing radar interferometry: The TOPSAR
Massonnet, D., H. Vadon, and M. Rossi, Reduction of the need for
mission,Proc. IEEE, 82(12), 1774-1786, 1994b.
phase unwrappingin radar interferometry,IEEE Trans. Geosci. Zebker, H.A., P.A. Rosen, and S. Hensley, Atmosphericeffects in
RemoteSens.,34(2), 489-497, 1996.
interferometricsyntheticaperture radar surface deformationand
Meade, C., and D.T. Sandwell,Syntheticaperture radar for geodesy,
topographic
maps,J. Geophys.Res.,102(B4), 7547-7563, 1997.
Science,273(30), 1181-1182, 1996.
Peltzer, G., and P. Rosen,Surface displacementof the 17 May 1993
E. J. PriceandD. T. Sandwell,Instituteof Geophysicsand Planetary
Eureka Valley, California, Earthquake observed by SAR
Physics,ScrippsInstitutionof Oceanography,
9500 GilmanDr., La Jolla,
interferometry,Science,268(2), 1333-1336, 1995.
CA 92093-0225. (email: sandwella•geosat.ucsd.edu)
Peltzer,G., P. Rosen,F. Rogez,and K. Hudnut,Postseismic
reboundin
fault step-overs
causedby pore fluid flow, Science,273(30), 12021204, 1996.
(ReceivedJanuary26, 1998;revisedJuly 7, 1998;
acceptedAugust31, 1998.)