Chapter 8 - Flows in Series
advertisement

8
Flows in Series-Parallel-Graphs
We have already studied series-parallel (multi)graphs in Sections 6.14 and 6.15.
There we showed that Braess’s Paradox can not occur in these graphs, and that
Nash flows can be computed efficiently by means of dynamic programming. In this
Chapter, we are going to study flows in series-parallel graphs in greater detail. For
convenience, we repeat the recursive definition of series-parallel graphs:
Definition 8.1 (Series-parallel graph)
The class of (two-terminal) series-parallel (multi)graphs can be defined by the following rules (cf. [BLW87]):
(i) The set of primitive graphs consists of the single graph P with vertex set {s, t}
and the single directed edge (s, t). The vertex s is the “start-terminal” of P
and the vertex t is the “end-terminal” of P .
(ii) Let G1 = (V1 , R1 ) and G2 = (V2 , R2 ) be series-parallel graphs with terminals
s1 , t1 and s2 , t2 respectively. Then the graph obtained by identifying t1 and
s2 is a series-parallel graph, with s1 and t2 as its terminals. This graph is the
series composition of G1 and G2 . The graph obtained by identifying s1 and
s2 and also t1 and t2 is a series-parallel graph, the parallel composition of G1
and G2 . This graph has s1 (= s2 ) and t1 (= t2 ) as its terminals.
In all what follows, we will assume that a series-parallel graph G is accompanied
(or given) by its parse tree (or decomposition tree) which specifies G is constructed
using the above rules. The size of the parse tree is linear in the size of the input
graph. As mentioned in Section 6.14, such a parse tree (decomposition tree) can be
computed in O(m) time by an algorithm given in [VTL82]. The presentation and
analysis of this algorithm is, unfortunately, beyond the scope of this lecture. For
a given graph H in the decomposition tree let us denote by val(H) the maximum
flow value from the s terminal to the t terminal of H.
8.1
Maximum Flows
In this section we investigate the complexity of computing maximum flows in seriesparallel graphs. Recall that a feasible (s, t)-flow f in a graph G with upper capacities c is called a blocking flow, if there is no path P from s to t in G such that
f (r) < c(r) for all r 2 P (cf. Definition 3.17).
130
Flows in Series-Parallel-Graphs
Lemma 8.2 Any blocking flow in a series-parallel graph is also a maximum flow.
Proof: Once more we use induction on the size of the decomposition tree of the
graph G. The claim is clear, if G is a primitive graph consisting of a single arc.
Let G be the parallel composition of G1 and G2 . If f is a blocking flow in G, then
its restriction to G1 and G2 must also be blocking in those subgraphs. Thus, by
induction hypothesis f |Gi is a maximum flow in Gi , i.e., val(f |Gi ) = val(Gi ) for
i = 1, 2. Since val(f ) = val(f |G1 ) + val(f |G2 ) and val(G) = val(G1 ) + val(G2 ), the
claim follows.
Finally, let G be the series composition of G1 and G2 . Then any blocking flow f must
be also blocking in at least one of the graphs Gi . Assume that f |G1 is blocking in G1
(the other case is symmetric). Then, by induction hypothesis val(f ) = val(f |G1 ) =
val(G1 ). Since val(G) = min{val(G1 ), val(G2 )} it follows that any feasible flow in G
has value no greater than val(G1 ) = val(f ) and, hence, f is a maximum flow in G.
2
In Section 3.2 we gave an O(nm) time algorithm to compute a blocking flow in any
graph. In Lemma 3.22 we also showed that in the case of unit-capacity networks, a
blocking flow can be computed in O(n + m) time. Thus, this gives a O(nm) time
maximum flow algorithm for the general series-parallel case and a linear time O(n+
m) algorithm for the unit capacity case.
Lemma 8.3 Suppose that G = (V, R, ↵, !) is a series-parallel graph with at least 3
vertices and without parallel arcs. Then |R| 3|V | 6.
Proof: We prove the claim by induction on the size of the decomposition tree.
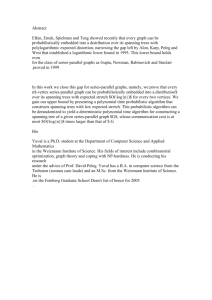
The claim is true for the base case |V | = 3: the only series-parallel graphs with 3
nodes and without parallels are depicted in Figure 8.1 with 2 3 · 3 6 = 3 and
3 3 · 3 6 = 3, respectively.
Figure 8.1: Possible series-parallel graphs with 3 nodes and without parallels
If G is the series composition of G1 and G2 , then we have
|R| = |R1 | + |R2 |
ind. hyp.
3|V1 |
6 + 3|V2 |
6 = 3(|V1 | + |V2 |
1)
9 3|V |
6.
2)
6 = 3|V |
6.
If G is the parallel composition of G1 and G2 , then
|R| = |R1 | + |R2 |
ind. hyp.
3|V1 |
6 + 3|V2 |
6 = 3(|V1 | + |V2 |
This completes the proof.
2
So, if we have a series-parallel graph without parallel edges, then m 2 O(n) and our
running time of O(nm) improves to O(n2 ). (This obviously also holds true for the
single-arc case |V | = 2.) Now, observe that we can eliminate parallel edges simply
by identifying the subtrees which contain only parallel compositions and end at the
leaves. This can be accomplished easily in O(m) time and corresponds to replacing
each bundle of parallel arcs by a single arc with capacity equal to the sum of the
bundle. Combining this with Lemma 8.2 gives the following result:
File: –sourcefile–
Revision: –revision–
Date: 2015/02/09 –time–GMT
8.2 Minimum Cost Flows
Theorem 8.4 A maximum flow in a series-parallel graph can be computed in
time O(n2 ). If all capacities are equal to 1, then the maximum flow algorithm runs
in fact in linear time O(n + m).
2
We have reached a running time of O(n2 ) which beats our fastest maximum flow
algorithms of Chapter 3. Still, we can do better!
As a warmup let us first compute the value of a maximum flow in a series-parallel
graph G = (V, R, ↵, !) with capacities c : R ! R+ . As usual, we use a dynamic
programming approach guided by the decomposition tree of G. Recall that val(H)
denotes the maximum flow value from the s terminal to the t terminal of H.
If H = ({s, t}, {(s, t)}) is the primitive graph consisting of just the two terminals
and a single edge connecting the two vertices, then clearly val(H) = c(s, t). Thus,
we can compute the value val(H) for a leaf in the decomposition tree in constant
time.
If H is the series composition of two (series-parallel) graphs H1 and H2 , then
val(H) = min{val(H1 ), val(H2 )}. Finally, if H is the parallel composition of H1
and H2 , then val(H) = val(H1 ) + val(H2 ). This shows that for an internal node H
of the decomposition tree we can compute val(H) also in constant time given the
values for the two sons. This gives an algorithm with running time O(m) to compute
the maximum flow value.
How can we get the flow on the arcs of G from the information which we have
computed so far? This requires a little bit more thought. Suppose we know a
value z val(H) which we would like to route through for a subgraph H in the
decomposition tree (At the end, of course, we will be interested in the case that
z = val(G)). We would like to compute a feasible flow in H which achieves exactly
the value z.
If H is the parallel composition of H1 and H2 , then as above z val(H) = val(H1 )+
val(H2 ). We can now pick any values z1 0 and z2 0 such that z1 + z2 = z and
z1 val(H1 ) and z2 val(H2 ). If we know (recursively) how to route those values
through H1 and H2 , we have a flow in H as desired. Similarly, if H is the series
composition of H1 and H2 , then z val(H) = min{val(H1 ), val(H2 )}. Thus, if we
know how to route zi := z val(Hi ) units of flow through Hi for i = 1, 2 we have
again a flow in H as desired.
The above considerations show that we can process the decomposition tree topdown, starting at the root G with z = val(G). Then, at any node which represents
some subgraph H and some value z val(H), we write z1 and z2 as above on the
two nodes representing the two subgraphs H1 and H2 from which H is composed.
We then proceed to the subgraphs. The procedure stops when we reach a leaf,
which represents an arc r. Then, we simply set f (r) := z. This gives a maximum
flow. The time spent at any node in the decomposition tree is O(1). Thus, this
gives us a linear time algorithm. We have just proved the following result:
Theorem 8.5 A maximum flow in a series-parallel graph can be computed in
time O(n + m).
2
8.2
Minimum Cost Flows
Next consider the minimum cost flow problem on two terminal series-parallel graphs
in a parametrized version: given G = (V, R) with source s, sink t together with
capacity c(r)
0 and cost k(r) 2 R for all r 2 R, two distinct vertices s, t 2 V ,
File: –sourcefile–
Revision: –revision–
Date: 2015/02/09 –time–GMT
131
132
Flows in Series-Parallel-Graphs
we aim to determine a minimum cost flow sending z units of flow from s to t. The
problem can be formulated as follows:
X
min
k(r)f (r)
(Pz )
r2R
s.t. excessf (v) = 0
excessf (s) =
for all v 6= s, t
z
excessf (t) = z
for all r 2 R
0 f (r) c(r)
The value zmax denotes the maximum flow value, such that (Pz ) has a feasible
solution f . Throughout this section we denote by Pxy some x-y-path in G.
The following Lemma is due to Valdes et al. [VTL82] and gives a criterion to decide
whether a graph is series parallel.
Lemma 8.6 A directed, acyclic graph G = (V, R) is two terminal series-parallel if
and only if there are no four distinct vertices s0 , t0 , u, v 2 V such that there are –
except for the start and end vertex – pairwise node-disjoint paths Ps0 u , Ps0 v , Puv , Put0
and Pvt0 .
2
The method to determine a solution to (Pz ) is a simple Greedy-type augmenting
path procedure: find a minimum cost s-t-path P in G and send as much flow along P
as possible, i.e., as long as f (r) c(r). If an arc r on the current path P becomes
saturated, we remove r from G, decrease the capacity of all other arcs in P by the
(residual) capacity c(r) and repeat. Algorithm 8.1 shows the method more formally.
Algorithm 8.1 Augmenting Path Algorithm for Min Cost Flow in SP-graphs.
Greedy-SP-MinCost
1 for all r 2 R do
2
f (r) := 0, j = 0
3 end for
4 while there is a path in G from s to t do
5
j := j + 1
6
find a min cost s-t-path Pj and set k(P ) = kj
7
lj := min{c(r) : r 2 Pj }
8
for all r 2 Pj do
9
c(r) := c(r) lj
10
if c(r) = 0 then
11
R := R r
12
end if
13
end for
14 end while
Observe that this method is an augmenting path algorithm which does not use any
backward arcs as none of these are taken into consideration when choosing the path
of minimum cost. Furthermore, the method indicates that the objective function
value of (Pz ) as a function in z is piecewise linear (as a function of z):
As long as possible (i.e., on an interval of length lj ), flow is pushed along a path
increasing the objective value linearly by the cost of the respective path (i.e., with
slope kj ). After that the graph is updated and a new path is chosen. The validity
of the method is also a necessary condition for a graph to be series-parallel as the
following theorem shows.
File: –sourcefile–
Revision: –revision–
Date: 2015/02/09 –time–GMT
8.2 Minimum Cost Flows
133
Theorem 8.7 Let G be a directed, acyclic graph with a single source s and a single
sink t. Then G is a two-terminal series-parallel graph if and only if the Greedymethod in Algorithm 8.1 solves the min cost flow problem (Pz ) for all 0 z zmax
for arbitrary costs k and arbitrary capacities c 0.
Proof: First suppose that G is in fact series-parallel. We show the following property: for fixed z, 0 z zmax , and Pst a min cost path from s to t, there is an
optimal solution f ⇤ for (Pz ) such that
f ⇤ (r)
min {z, min{c(r0 ) : r0 2 Pst }}
for all r 2 Pst .
(8.1)
Hence, the choice in Algorithm 8.1 is valid and the claim that Algorithm 8.1 gives
an optimal solution follows.
We show the claim by induction on the number of edges in G. The claim is obviously true for a single-edge graph. So, assume that G is obtained by the serial
combination of two (series-parallel) graphs G1 and G2 , where si and ti denote the
i
source and sink of Gi , and Pst
denotes the restriction of Pst to Gi , for i = 1, 2. Observe that it the series composition, the flow value through G1 and G2 also equals z.
By induction hypothesis, the problem (Pz ) defined on Gi , i = 1, 2, has an optimum
(i)
⇤
⇤
solution f(i)
such that f(i)
(r)
min{z, min{c(r0 ) :0 r 2 Pst }}. The combination
⇤
⇤
(f(1) , f(2) ) yields an optimum solution for (Pz ) on G fulfilling (8.1).
Next, assume that G is obtained by a parallel composition of G1 and G2 . Without loss of generality assume that Pst is completely contained in G1 . If in an
optimal solution to (Pz ) on G, z1 units of flow go through G1 , we know by induction hypothesis (applied for (Pz1 ) in G1 ) that there is an optimal solution with
f ⇤ (r)
min{z1 , min{c(r) : r 2 Pst }}. Obviously, z1 z, so the claim follows
directly if the above minimum is attained at some c(r) with r 2 Pst , as then also
f ⇤ (r)
min {z1 , min{c(r) : r 2 Pst }} = min{z, min {c(r) : r 2 Pst }} .
(8.2)
Assume that z1 is strictly less than min{z, min{c(r) : r 2 Pst }}, i.e., in the optimum
solution sending z units in G, the path Pst is not saturated. Then, (8.2) is not
guaranteed. But by choice, Pst is a path with minimum cost, and hence, rerouting
some flow in the optimum solution to Pst does not entail larger cost and we can
assume – again without loss of generality – that in fact z1 min{z, min{c(r) : r 2
Pst }} and (8.2) holds.
To show the other implication, let G be a directed, acyclic graph for which Algorithm 8.1 gives the optimum solution for all 0 z zmax and suppose that G is
not series-parallel. We will construct capacities and costs yielding a contradiction.
By Lemma 8.6 there are four distinct vertices s0 , t0 , u, v and five, with the exception
of the end vertices, node-disjoint paths Ps0 u , Ps0 v , Puv , Put0 and Pvt0 in G. Furthermore, if s 6= s0 , then there is also a path Pss0 does not share any vertex with the
above five path except for the end-vertex as G is acyclic: if Pss0 uses a vertex in
one of these and then returns to s0 , this would imply a cycle in G. By the same
arguments, there is also a disjoint path Pt0 t (given t0 6= t). If s = s0 or t = t0 , the
respective paths are empty. Consider an instance on G with the following capacities
and costs for all edges r 2 R:
8
>
<2 if r 2 Pss0 or r 2 Ptt0
c(r) := 1 if r 2 Ps0 u , r 2 Ps0 v , r 2 Puv , r 2 Put0 or r 2 Pvt0
>
:
0 else
(
0 if r 2 Ps0 u , r 2 Puv or r 2 Pvt0
k(r) :=
1 else
File: –sourcefile–
Revision: –revision–
Date: 2015/02/09 –time–GMT
134
Flows in Series-Parallel-Graphs
u
1
c=2
k=1
s0
c=
c=1
k=0
s
c= 0
k=
k= 1
1
v
c=
k= 1
1
t0
1
c= 0
k=
c=2
k=1
t
Figure 8.2: Subgraph contained in non-series-parallel G
The situation is illustrated in Figure 8.2. Observe that, given these values, no edge
outside can be used as c(r) = 0 and path P 0 := Pss0 Ps0 u Puv Pvt0 Pt0 t is the
unique minimum cost path. For z = 2, the optimum solution to (P2 ) does obviously
not use P 0 as this would block any other path while Algorithm 8.1 does, and hence,
the algorithm does not solve (P2 ) for the given instance.
2
Let us briefly analyze the running time of the algorithm. Since in any iteration at
least one arc becomes saturated (i.e., its residual capacity is reduced to zero) and
any arc can become saturated at most once by the fact that the algorithm does not
use any backward arcs, it follows that there are at most m iterations of the whileloop. Thus, the only task becomes to bound the effort for computing a minimum
cost s-t-path in Step 6. A first naive approach uses dynamic programming: Let
H be a series-parallel graph and denote by k ⇤ (H) the length of a shortest s-t-path
in H with respect to some edge weights k. Then, if H consists of a single edge,
k ⇤ (H) is trivial to compute. If H is the series-composition of H1 and H2 , then
k ⇤ (H) = k ⇤ (H1 )+k ⇤ (H2 ). Finally, if H is the parallel composition, we have k ⇤ (H) =
min{k ⇤ (H1 ), k ⇤ (H2 )}. Thus, we can compute k ⇤ (G) bottom-up from the leaves of
the decomposition tree in time O(m). This gives an overall running time of O(m2 ).
We will now show how this running time can be reduced to O(nm + m log m).
First, we represent each bundle of parallel edges by a binary heap which is minordered with respect to the costs. Thus, we can find the minimum cost element of
the bundle in O(1) time. We replace each subtree representing such a bundle in the
decomposition tree by a single vertex which corresponds to the heap. Thus, we are
in the same situation of Theorem 8.4 where we had a series-parallel graph without
parallel arcs. Thus, by Lemma 8.3 we have at most 3n 6 edges left, and shortest
path computation takes time O(n). When an edge becomes saturated, we delete
the corresponding minimum cost element from the heap in time O(log m). Thus,
we obtain:
Theorem 8.8 A minimum cost flow in a series-parallel graph can be found in time
O(nm + m log m).
2
File: –sourcefile–
Revision: –revision–
Date: 2015/02/09 –time–GMT

![-----Original Message----- From: Val Lewandowski [ ]](http://s2.studylib.net/store/data/015587716_1-a31a561e6293c546b1ea3d700977080d-300x300.png)