Tech. Explanations

BINDER
1 Ω
=1
U
=
√R
•
P
1W = 1V·A
—
A U
R
=—
P
2
1 Ω
=1
L
=
•
R
W=
∫
s
2
1V =1
√
P U
—
=
I =
—
1W =1
R R s
1
Ω
1N =1 kgm
2 s
F
( s
) ds P
U
=—
2
1H = 1
—
A
U
=
R
•
I
1kp = 9.81N
R 1Hz =
the technical bac
kg ro un k e c g r o u p
control power line high power line atex line classic line elevator line oscillating line
p o w e r o f pa r t n e r s h i p a n d m a g n e t i s m
about us
The KENDRION ELECTROMAGNETIC COMPONENTS Group
(KEC Group) sees itself as a centre of excellence in the field of electromagnetism.
KENDRION MAGNETTECHNIK GmbH develops and manufactures a wide range of electromagnetic products in the most diverse variations and designs for countless technical applications. The company grew out of the traditional operations of Binder, Thoma and Neue Hahn and is now Europe’s leading manufacturer of electromagnetic components.
Project work is our focal point. We at KENDRION
MAGNETTECHNIK take this to mean the joint development of devices together with our customers, taking into account special operating conditions, special requirements and high economic efficiency. Our objective is to provide the market with the devices it needs. With optimised costsbenefits ratios to secure the competitiveness of our customers.
Our many years of experience in the development and manufacture of electromagnetic devices plus the skills and commitment of our employees enable us to recognise the needs of the market. And we turn those needs into highquality products in cooperation with our customers.
We at KENDRION MAGNETTECHNIK achieve customerfocused solutions in all corporate divisions. Those solutions bring maximum benefits for customers and hence considerably strengthen their position in their markets.
• Customer-centred market management,
• innovative product developments,
• lean, flexible logistics,
• high quality standards,
• affordable prices,
• and the power of magnetism guarantee the success of
KENDRION MAGNETTECHNIK.
2
k e n d r i i o n m a g n e t t e ch y ou r o n est o p so lu ti o n www.kendrionmt.com
contents
6
6.1
6.2
6.3
6.3.1
6.3.2
6.3.2.1
6.3.2.2
6.3.2.3
6.4
6.5
7
4
4.1
4.2
4.3
4.4
4.5
4.6
4.7
5
5.1
5.2
5.3
5.4
1
2
2.1
2.2
2.3
2.4
3
3.1
3.2
3.3
14
15
16
17
18
10
11
12
13
8
9
Definitions of the solenoids referred to on our product data sheets
Force, stroke, linear work
Force
Stroke
Force–stroke relationship
Linear work
Voltage, current, power
Rated voltage U
Rated current I
N
N
Rated power P
N
Coil ON time, total cycle time, cycle sequence, duty cycle
Coil ON time
Duty cycle
Coil OFF time
Total cycle time
Cycle sequence
Examples of duty cycle calculations
Switching frequency
Response and release times, operating modes, temperature terms, insulation classes
Response and release times
Operating modes
Temperature terms
Insulation classes
6
6
7
8
Electrical connection
Voltage and current data
Rectifiers
Electrical circuits
Measures to protect against voltage spikes when switching off
Measures for shortening response time and increasing linear force during response phase, and for reducing power consumption
Fast energisation and over-powering to shorten the response time t1
Over-powering to increase holding force
Economy mode to reduce power consumption
Input power and ambient temperature
Switching operations for DC solenoids
9
10
11
SI units and symbols used in equations
9
12
Page
4
5
Testing of solenoids
Electromagnetic time constants ( τ ) and inductances
Operating conditions
Service life
Notes for DC and AC linear solenoids
Ordering information
Wiring recommendations
Class of protection
Technical data (
permanent magnet solenoids, holding electromagnets and locking solenoids)
Technical data (
inline vibrators, curved motion vibrator and vibrating solenoids)
Technical data (
AC and 3-phase solenoids)
SI units and symbols used in equations
12
13
14
15
18
21
23
www.kendrionmt.com
3
4 definitions
1. Definitions of the solenoids referred to on our product data sheets
Solenoid
A linear solenoid with a plunger that performs a limited longitudinal movement (stroke) or a limited rotary movement (hinged armature) about a pivot.
A rotary solenoid with an armature that performs a rotary movement (rotation) with a limited angle of rotation.
Single direction linear solenoid (longitudinal stroke)
A device in which the linear movement from the initial position to the end position is achieved by applying an electromagnetic force and the return movement by means of external forces.
We distinguish between pull and push versions depending on the direction of the output power of the plunger.
pull push pull + push
2-coil linear solenoid, without neutral position
(longitudinal stroke)
A device that functions according to the principle of the single direction linear solenoid. The direction of the linear movement from one end position to the other or vice versa depends on the energisation. Here, the end position in one direction is at the same time the initial position for the opposite direction.
Single-acting spreader solenoid
A single direction linear solenoid that due to its design and technical specification is primarily used for releasing block or drum brakes.
Double-acting spreader solenoid
A linear solenoid consisting of two single-acting spreader solenoids that is particularly suitable for use in lift and escalator drives and in industrial brakes for releasing block or drum brakes.
Latching solenoid
A device in which the linear movement of the plunger from the initial position to the end position is achieved by applying an electromagnetic force, and in which – when the current is switched off – the plunger is held in the end position by means of an integral permanent magnet. Also known as a permanent magnet or self-holding solenoid.
Control solenoid
A linear solenoid that due to its design and technical specification is primarily used for operating valves in hydraulic control and/or regulation systems.
Valve solenoid
A linear solenoid that due to its design and technical specification is primarily used for operating valves in pneumatic and hydraulic control systems.
Rotary solenoid (rotary movement)
A device in which the limited rotary movement from the initial position to the end position is achieved by applying an electromagnetic force and the return movement by means of an internally or externally applied force.
Magnetic force F
M
This force is the usable mechanical force generated in the stroke direction reduced by the friction. It is specified on our product data sheets and on the rating plates. The magnetic force is reliably achieved at 90% of the rated voltage and maximum coil temperature.
At the rated voltage the figures specified can be increased by 20%.
Linear force F lin
This is the magnetic force that acts outwards, taking into account the associated plunger weight component.
When the solenoid is installed horizontally, for example, the linear force is equal to the magnetic force.
Holding force
In DC solenoids this is the magnetic force at the end position.
In AC solenoids this is the mean value of the magnetic force at the end position fluctuating cyclically with the alternating current.
Remanence force
This is the residual holding force after switching off the power. This residual holding force can be attributed to the residual magnetisation in magnetite. To minimise this effect, linear solenoids are provided with release shims, i.e. an air gap is intentionally created at the end position.
Restoring force
This is the force required to return the plunger to the initial position after switching off the power. (In rotary solenoids this force corresponds to the torque.) www.kendrionmt.com
the technical background
F
M
F
F f
F
DF
F lin
F
W m
P g
2. Force, stroke, linear work
2.1 Force
= magnetic force = F
F
- F
DF
= force exerted on the plunger by the magnetic field
= dynamic friction force
= linear force
= weight = m
P
· g
= mass of plunger m
= 9.81— s
2
= coefficient of friction
F lin
= F
M
- F
W
F
DF
= f · F
W pulling upwards or pushing upwards from below
F lin
= F
M
F
DF
= f · F
W operating horizontally pulling downwards or pushing downwards from above
F lin
= F
M
+ F
W
F
DF
= f · F
W
F
INU
F
N
= inclined negative uplift = F
W
= normal (perpendicular) force = F
W
· sin
· cos
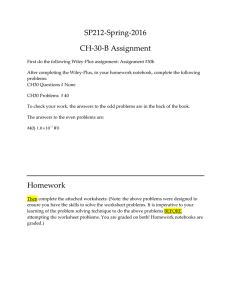
2.3 Force–stroke relationship
A graphic representation of magnetic force in relation to solenoid travel.
We distinguish between three characteristic relationships in moving towards the end position
(Fig. 1).
pulling or pushing upwards at an angle stationary
F
M
= F moving
INU
F lin
= F
M
- F
INU
F
DF
= f · F
N
F
INU
F
M
F
W
F
N
2.2 Stroke
Solenoid travel s
The distance travelled by the plunger between its initial position and its end position.
Initial position s
1
The position of the plunger prior to the start of the stroke and after completion of the return movement.
End position s
2
The designed, intended position of the plunger after completion of the stroke.
c s
F
M
Fig. 1 Force–stroke relationship a = descending characteristic (from right to left) b =
= ascending characteristic (from right to left)
= solenoid travel
= magnetic force
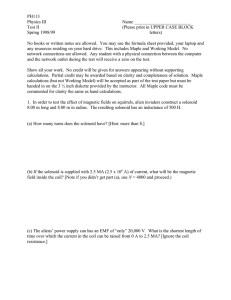
2.4 Linear work
The integral of magnetic force F
M solenoid travel s.
with respect to
W= s
2
∫
s
1
F(s)ds
The linear work is made up of a potential linear work component W ponent W
2
(Fig. 2).
1 and a kinetic linear work comds www.kendrionmt.com
F
M s s
1 s
2
W
1
W
2
Fig. 2 Linear work with a proportionally varying opposing force (e.g. spring)
= magnetic force
= solenoid travel
= initial position
= end position
= static linear work component
= dynamic linear work component
Similarly, in a rotary solenoid the linear work W is the integral of the torque M with respect to the angle of rotation.
W=
1
2
∫
M( )d
5
6 the technical background
3. Voltage, current, power
3.1 Rated voltage U
N
The rated voltages of the majority of devices kept in stock.
The rated voltage (U
N
) of a linear solenoid is the voltage for which it is designed. The values specified on the product data sheets are based on a rated voltage of 24 V. Other rated voltages can lead to deviations – both upwards and downwards – from the specified magnetic forces as a result of the different insulation components in the energisation coils.
The permissible permanent voltage change for a
DC linear solenoid is +10% to -10% of the rated voltage.
The rated voltage (U
N
) is the operating voltage specified on the product data sheets. The provisions of
VDE standards 0175 and 0176 apply.
The preferred voltages for DC linear solenoids are 12,
24, 48, 60, 110, 180 and 220 V. The data regarding magnetic force and power consumption given on the product data sheets generally applies to a voltage of
24 VDC. Different operating voltages can lead to deviations from the figures in the tables due to the changing copper factor. To ensure that the solenoid is not too hot and that the magnetic force does not fall below the value specified in the catalogue, a voltage tolerance of +10% to -10% of the rated voltage is permissible.
3.2 Rated current I
N
In devices with a voltage coil, the rated current is related to the rated voltage and a coil temperature of 20°C, and the rated frequency if necessary.
Unless otherwise specified, the rated holding current
I
HS is specified as the rated current for AC solenoids.
For three-phase solenoids this is as follows:
I
HS
=
P
HP
U · √ 3
In devices with a current coil, the rated current is the figure specified by the manufacturer.
Pull-in current I
AS
In AC devices this is the current ensuing upon energisation when the plunger is held in the initial position and transient phenomena have decayed.
Holding current I
HS
In AC devices this is the current ensuing upon energisation when the plunger is in the end position and transient phenomena have decayed.
3.3 Rated power P
N
(rated input power)
The power consumption at rated current as specified by the manufacturer.
Rated power P
N
The rated power is the product of the rated voltage
(U
N
) and the rated current (I
N
) at a coil temperature of
20°C. The rated power is specified on the product data sheets. If necessary, the rated current can be calculated from the following equation:
I
N
P
U
N
N
Pull-in power P
AP
(input power for response)
In AC solenoids this is the apparent power ensuing after transient phenomena have decayed when the plunger is held in the initial position. The pull-in power
P
AP for a rotary solenoid can be calculated from the following equation:
P
AP
= √ 3 · U · I
AS
Holding power P
HP
(input power for holding)
In AC solenoids this is the apparent power ensuing after transient phenomena have decayed when the plunger is in the end position. The holding power P
HP for a rotary solenoid can be calculated from the following equation:
P
HP
= √ 3 · U · I
HS
4. Coil ON time, total cycle time, cycle sequence, duty cycle
4.1 Coil ON time
The coil ON time is the time between switching on and switching off the energisation current.
4.2 Duty cycle
The duty cycle is the percentage relationship of coil ON time to total cycle time. It is calculated using the following equation: duty cycle = _________ . 100 total cycle time
The calculation of the duty cycle is generally based on the preferred total cycle value of 5 minutes given in
DIN VDE 0580 point 3.2.2.
For irregular total cycle times, the duty cycle is determined by the ratio of the sum of the coil ON times to the sum of the total cycle times over a longer operating period.
The preferred duty cycle values according to DIN VDE
0580 point 3.2.3 result in the following maximum coil
ON times for a total cycle time of 5 minutes:
100% duty cycle no restriction
60% duty cycle max. 180 s
40% duty cycle max. 120 s
25% duty cycle max. 75 s
15% duty cycle max. 45 s
5% duty cycle max. 15 s Tab. 1
The maximum coil ON times may not be exceeded. If the duty cycle has been calculated and the coil ON time value exceeds the maximum permissible DIN VDE value, the higher duty cycle in whose range the coil ON time falls should be chosen. In DC solenoids, depending on the coil ON time, it is permissible to increase the linear work corresponding to the higher permissible input power (Fig. 3).
www.kendrionmt.com
the technical background
4.6 Examples of duty cycle calculations
Fig. 3 Linear work W in relation to duty cycle for DC solenoids. Preferred duty cycle values to DIN VDE 0580 point 3.2.3.
4.3 Coil OFF time
The coil OFF time is the time between switching off the energisation current and switching on again.
4.4 Total cycle time
The total cycle time is the sum of the coil ON time and the coil OFF time. For DC linear solenoids the total cycle time is max. 5 min = 300 s. This corresponds to
12 switching cycles per hour. The minimum total cycle time is limited by the response and release times in conjunction with the duty cycle. A total cycle time of
300 s results in maximum values for the coil ON times which may not be exceeded (Tab. 1). If the permissible coil ON time is exceeded, select a solenoid with the next higher duty cycle. If the coil ON time exceeds
180 s, design the solenoid for a 100% duty cycle
(continuous duty), or in special cases adapt the coil ON time calculated from the ON/OFF ratio by designing the coil accordingly. For irregular total cycle times, the duty cycle is determined by the ratio of the sum of the coil ON times to the sum of the total cycle times over a longer operating period.
4.5 Cycle sequence
This is a single or cyclically recurring succession of total cycle times.
a) given: switching frequency = 80 S/h coil ON time = 10 s wanted: duty cycle answer: total cycle time = 3600 : 80 = 45 s duty cycle = 10 x 100 : 45 = 22.2
Select a solenoid with a 25% duty cycle!
b) given: switching frequency = 300 S/h coil ON time = 5 s wanted: duty cycle answer: total cycle time = 3600 : 300 = 12 s duty cycle = 5 x 100 : 12 = 41.7
Select a solenoid with a 60% duty cycle!
c) given: switching frequency = 6 S/h coil ON time = 6 s wanted: duty cycle answer: total cycle time = 3600 : 6 = 600 s duty cycle = 6 x 100 : 600 = 1
Select a solenoid with a 5% duty cycle!
d) given: switching frequency = 18 S/h coil ON time = 200 s
It is not necessary to calculate the duty cycle here because the permissible coil ON time of 180 s for a
60% duty cycle has already been exceeded (Tab. 1).
Therefore, a solenoid with a 100% duty cycle is the only answer!
4.7 Switching frequency
The switching frequency, i.e. the maximum permissible number of switching operations, is practically unlimited for DC solenoids. The achievable number of switching operations is determined by the response and release times and also depends on the type of load. Tab. 2 shows the maximum ON and OFF times for various numbers of switching operations. Using the response times specified on the data sheets, the maximum permissible number of operations per hour can be calculated as follows: max. permissible switching frequency (S/h)
= 3600 x 1000 : min. total cycle time (ms) min. total cycle time (ms) = response time (ms) x 100 : duty cycle
If the total of the response and release times specified on the data sheets is greater than the minimum total cycle time calculated, this newly calculated figure
(at least) should be entered into the above equation.
Duty cycle (%)
Max. permissible coil ON time (s)
5
15
15
45
25
75
40
120
5
15
25
40
No. of switching operations (S/h) 12
Total cycle time (s) 300 t on
15
45
60
100
75
120
180 t off
285
255
225
180
120
7.5
12
18
120
30 t on
1.5
4.5
t off
28.5
25.5
22.5
18
12
300
12 t on
0.6
1.8
3.0
4.8
7.2
t off
11.4
10.2
9.0
7.2
4.8
600
6 t on
0.3
0.9
1.5
2.4
3.6
no restriction t off
5.7
5.1
4.5
3.6
2.4
Tab. 1
60 100
180 no restriction
Tab. 2
1200
3
3000
1.2
t on
0.15
0.45
t off
2.85
2.55
t on
0.06
0.18
t off
1.14
1.02
0.75
1.2
1.8
2.25
1.8
1.2
0.3
0.48
0.72
0.9
0.72
0.48
www.kendrionmt.com
7
8 the technical background
Release delay
Release time
Return time
Slow intermittent duty is the operating mode in which the coil ON time is so short that the stabilised coil temperature is not reached, and the coil OFF time is so long that the solenoid cools down to its reference coil temperature.
Voltage
Current
Linear movement
Response delay Travel time
Response time
5. Response and release times, operating modes, temperature terms, insulation classes
5.1 Response and release times
Response delay (t
11
) is the time between switching on the energisation current and the plunger beginning to move.
Travel time (t
12
) is the time taken by the plunger to move from its initial position to its end position.
Response (t
1
) is the total of response delay plus travel time.
Release delay (t
21
) is the time between switching off the energisation current and the plunger beginning to move back.
Return time (t
22
) is the time taken by the plunger to move from its end position back to its initial position.
Release time (t
2
) is the total of release delay plus return time.
The diagram above illustrates the characteristic oscillogram with lines indicating voltage, current and movement of a DC linear solenoid. This clearly shows the composition of the response and release times. The response times specified on the data sheets are reliably reached at 70% of the magnetic force, the rated voltage and with the solenoid at its operating temperature.
5.2 Operating modes
Continuous duty is the operating mode in which the coil ON time is so long that the stabilised coil temperature is reached.
Fast intermittent duty is the operating mode in which coil ON time and coil OFF time alternate in a regular or irregular sequence but the coil OFF times are so short that the device cannot cool down to its reference coil temperature.
5.3 Temperature terms
The ambient temperature (°C) is the average temperature around the device.
The reference coil temperature (°C) of a solenoid is the stabilised coil temperature in the non-energised state for the intended application. In certain cases this temperature may differ from the ambient temperature if, for example, the solenoid is fitted to a part of a machine operating at a higher or lower temperature.
Unless specified otherwise, the reference coil temperature is +35°C.
The differential temperature (°C) is the difference between the temperature of the device or a part thereof and the temperature of the associated means of cooling at the same time (or the surroundings in the case of non-cooled solenoids).
The maximum stabilised coil temperature (°C) is the maximum permissible temperature for the solenoid or a part thereof. It is usually determined by the thermal stability of the insulation used.
Air cooling is the case when the dissipation of heat from the solenoid to the surrounding air is achieved by way of, for instance, mounting the device on materials with low or poor thermal conduction qualities, e.g.
wood, plastic.
Heat sink cooling is the case when the solenoid is in contact with a metal surface enabling good thermal conduction and most of the heat is dissipated via this surface. In this situation the solenoid can be operated with a longer coil ON time or, in certain circumstances, with a higher voltage for the same coil ON time. The relative humidity should be approx. 50% at 35°C.
Higher relative humidities are permissible at lower temperatures.
www.kendrionmt.com
the technical background
F
H
E
B
Y
A
Insulation maximum class
Temperature rise temperature (°C) limit (°C )
90
105
50
65
120
130
155
180
80
90
115
140
Tab. 3
Special reference coil temperatures
Our solenoids can also be used with special reference coil temperatures when the permissible duty cycle is multiplied by the corresponding conversion factor. This does not change the linear work specified for a coil at operating temperature. Use the diagram below to find the duty cycle for a special reference coil temperature.
Factor
Example: A solenoid with a duty cycle of 25% and a stabilised coil temperature of 60°C is to be used.
With which duty cycle may the solenoid still be operated? Using the diagram, we find that the operational duty cycle is now only:
25% duty cycle x 0.67 = 16.75% duty cycle
6. Electrical connection
6.1 Voltage and current data
The device is to be connected to the corresponding power supply depending on whether it has been designed as a DC, AC or 3-phase solenoid. Please refer to the requirements regarding the electrical connection as given on the product data sheet or the drawing in each individual case. Various connection options are possible, e.g. wires, terminals or plugs/sockets.
In devices of protection class I without a PE line, the PE connection is to be guaranteed by the user according to VDE 0100 point 3.5.
The preferred rated voltages are given on the product data sheets. The permissible permanent voltage change at the connection of the active device should not exceed +10% to -10% of the rated voltage.
6.2 Rectifiers
A solenoid for DC operation should be connected directly to an AC supply via a rectifier or transformer rectifier. On request, KENDRION can supply rectifiers in the form of half-wave and/or bridge rectifiers, and transformer rectifiers.
6.3 Electrical circuits
When the solenoid is switched on the AC side (Fig. 4), the switch opening delay should be taken into account.
When the solenoid is switched on the DC side (Fig. 5), the switch opening delay is very short, but this can lead to a very brief overvoltage. The user must install suitable protective measures and circuit components to prevent unacceptably high overvoltages. KENDRION can supply suitable circuit components on request.
6.3.1 Measures to protect against voltage spikes when switching off
Converting the high breaking energy present with DC switching into a form that is harmless for solenoids, rectifiers and switches guarantees a safe and troublefree circuit. Resistors, capacitors, varistors, diodes,
Zener diodes, etc. can be used to provide the necessary protection. Here, the values of the ohmic resistance R and the voltage spikes when switching off are in inverse proportion to each other. As R increases, the breaking time decreases. A value of R = 7 Rm is advisable.
With the circuit shown in Fig. 6, the voltage drop is slowest when just one overvoltage protection device with a diode is wired in parallel with the solenoid.
Higher ohmic resistances, on the other hand, lead to a significantly shorter breaking time.
Fig. 8 clearly shows that higher permissible voltage spikes (corresponding to the Zener voltage of the
Zener diode) shorten the release delay of the solenoid.
As already mentioned, the voltage spikes when switching off (DC switching) can cause damage not only to the device being switched but also to the switch itself. Figs 9 and 10 show two overvoltage protection options for the switch.
Fig. 6
D = diode
R = ohmic resistance
5.4 Insulation classes
DIN VDE 0580 (July 2000) allocates materials to insulation classes according to their long-term thermal stability as shown in Tab. 3 above. Our linear solenoids are manufactured with class E, B or F insulation depending on the particular model. If required, most devices can also be supplied with class H insulation.
Fig. 4 Switching on the AC side
Fig. 5 Switching on the DC side
I
0
U
= —
M
I = I
0
(R + R
M
) · t
· e - ———
M
Fig. 7 Overvoltage protection for solenoid and switching contact by means of diode and ohmic resistance
L
M
R
M
= inductance of solenoid M
= ohmic resistance of solenoid M www.kendrionmt.com
9
10 the technical background
Fig. 8 Overvoltage protection for solenoid by means of diode and Zener diode
D
Z
U
Z
= Zener diode
= Zener voltage
U = supply voltage to solenoid
Fig. 9 Overvoltage protection for switch by means of diode and ohmic resistance
Fig. 10 Overvoltage protection for switch by means of capacitor and ohmic resistance
R s
= ohmic resistance
C = capacitor
D = diode
R
M
= ohmic resistance of solenoid
6.3.2 Measures for shortening response time and increasing linear force during response phase, and for reducing power consumption
Solenoids permit the following options in special cases when the response time is to be shortened and the linear force increased during the response phase, or the power consumption is to be reduced.
6.3.2.1 Fast energisation and overvolting to shorten the response time t
1
Here, either the time constant governing the rise in current should be decreased (fast energisation) or the quotient increased for the same time constant
(overvolting).
Fast energisation: T = ———
R
V
+ R
M
Overvolting: ——
R
M
R
V
R
M
L
M
= series resistor
= ohmic resistance of solenoid
= inductance of solenoid
U = supply voltage to solenoid
In the fast energisation option, connecting an ohmic resistance in series with the solenoid increases the total resistance and decreases the time constant.
In the overvolting option, a multiple of the rated voltage is applied to the solenoid and this shortens the switch closing time for the same time constant T as when connected to the rated voltage. Fig. 11 illustrates how fast energisation and overvolting influence the response time t
1
. The values given are typical values for guidance only.
6.3.2.2 Overvolting to increase holding force
The overvolting option mentioned above is also suitable for special situations requiring a higher linear force throughout the travel (during the response phase). KENDRION can supply suitable overvolting rectifiers which are in a position to supply the solenoid with a higher voltage throughout the response time.
Besides shortening the response time to 30-40% of the standard value, such rectifiers also increase (by up to two times) the linear force during the response phase
(for devices with 100% duty cycle) (Fig. 12).
KENDRION single-phase overvolting rectifiers automatically switch back from the higher voltage to the standard voltage after the response phase. The higher power consumption during the brief overvolting time is normally no problem for the solenoid.
M
Fig. 12 Influence of overvolting on the characteristic response of the solenoid a = with normal energisation b = holding force with normal energisation c = with overvolting rectifier
W
W
2
1
= normal linear work
= additional linear work gained due to overvolting
F
M
= magnetic force s = solenoid travel
Fig. 11 Shortening of response time by means of a) fast energisation and b) overvolting t
1N
U
N
= closing time without shortening influences
= rated voltage of solenoid www.kendrionmt.com
the technical background
6.3.2.3 Economy mode to reduce power consumption
It is not always necessary to increase the linear force during the response phase (see 6.3.2.2). There are applications in which the holding force achieved at the end of the response phase permits a decrease in the power consumption and hence also the temperature of the solenoid. Fig. 13 shows a circuit for such an economy mode. Here, once the plunger has reached its end position, a switch is actuated to connect a resistor with the solenoid in series. This resistor is shortcircuited by the switch during the response phase.
This results in the following designations: plunger in initial position and during response time
P
1
= U · I
1
= I
1
2 · R
M
Plunger in end position with power reduction
I
P
2
= U · I
2
= I
2
2 · (R
M
+ R
V
)
2 R
M
+ R 1
V
R
M
R
M
+ R
V
P
1
R
M
R
V
= input power s
1
= resistance of energisation coil
= series resistor
R
V can be designed with a value of up to two times the resistance of the solenoid. (The exact value must be determined by experimentation.) Fig. 14 shows the magnetic forces for various input powers.
6.4 Input power and ambient temperature
The input power values specified on the product data sheets were determined for an ambient temperature of
20°C. However, the energisation coils designed for this temperature can be operated in ambient temperatures up to 40°C. In doing so, the maximum permissible long-term temperature for the insulation used as given in DIN VDE 0580 point 3.3 Tab. 1 is reached, but not exceeded. The specified values for magnetic force and linear work are reached at the operating temperature and 90% of the rated voltage. The operating temperature is the temperature during operation with the specified data, increased by the reference ambient temperature of +40°C.
The input power must be reduced for ambient temperatures higher than 40°C. This also reduces the linear work. In certain circumstances this also applies when the solenoid is fitted to part of a machine that reaches operating temperatures higher than 40°C. The reduction in the input power can be achieved by way of a special energisation coil or by operating the solenoid with a lower voltage.
Fig. 15 shows the rated voltage, rated input power and rated linear work in relation to the ambient temperature for a DC solenoid.
input power adjusted to suit the ambient temperature.
For a guaranteed ambient temperature < 40°C, the input power and hence also the linear work can be higher than the corresponding rated value.
6.5 Switching operations for DC solenoids
The oscillograms shown in Figs 16 and 17 indicate the typical current, voltage and solenoid travel conditions for a DC solenoid in relation to time t when being switched on and off. The two diagrams clearly show the different behaviour depending on whether switching is carried out on the DC or the AC side.
The response times specified on the product data sheets are reliably achieved at 70% of the rated magnetic force and at rated voltage with the solenoid at its operating temperature.
Fig. 16 Switching behaviour with switching on DC side
Fig. 13 Circuit for economy mode
M
Fig. 14 Magnetic forces and holding forces for various input powers P
Fig. 15 Operating modes for DC solenoids in relation to ambient temperature
ϑ
U
N
13
W
N
P
N
= ambient temperature
= rated voltage
= rated linear work
= rated input power
Line 1 shows the voltage (in %) in relation to the ambient temperature with which a solenoid may be operated when its energisation coil is designed for the normal ambient temperature (as given on the product data sheet).
Line 2 shows the permissible input power as a percentage of the specified value when the solenoid must be operated in an ambient temperature other than 40°C.
Line 3 shows the linear work of the solenoid for an
Fig. 17 Switching behaviour with switching on AC side
ED= coil ON time
I = current
U = voltage s = solenoid travel t
2 t
12 t
21
22 t t = time
= response time t
1 t
11
= response delay
= travel time
= release time
= release delay
= return time www.kendrionmt.com
11
the technical background
12
Response delay (t
11
) : is the time between switching on the energisation current and the plunger beginning to move.
Travel time (t
12
) : is the time taken by the plunger to move from its initial position to its end position.
Release delay (t
21
) : is the time between switching off the energisation current and the plunger beginning to move back.
Return time (t
22
) : is the time taken by the plunger to move from its end position back to its initial position.
7. SI units and symbols used in equations
The SI units and symbols used in equations as given on the product data sheets and in the technical data are taken from DIN 1304. The most important variables used in the design of the devices are listed on page 15.
8. Testing of solenoids
8.1 Test voltage
All KENDRION solenoids are tested to ascertain their dielectric strength before leaving the factory. The test voltages used are given in DIN VDE 0580 point 5.3.1.
8.1.2 Renewed voltage test
The voltage test carried out during routine testing should not be repeated if it can be avoided. However, if a second test is called for, e.g. as an acceptance criterion, then this should be carried out with only 80% of the test voltage given in Tab. 4 below.
12
30
120
300
Z
2
6
600
1200
3600
Switching frequency
100% duty cycle max. s coil ON time s coil OFF time
12
4.8
2.4
1.2
0.4
720
240
120
48
40% duty cycle max. s coil ON time s coil OFF time
1080
360
180
72
18
7.2
3.6
1.8
0.6
9. Electromagnetic time constants ( ) and inductances (L)
The electromagnetic time constants (ms) for the initial and end positions of the plunger are specified on the product data sheets in order to determine the inductances of DC linear solenoids. These time constants allow the inductances to be calculated for various duty cycles and rated voltages according to the following example:
Given: solenoid type LHS060...
duty cycle = 100% rated voltage = 24 VDC
Wanted: inductance LIP (H) for initial position of plunger inductance LEP (H) for end posi tion of plunger
Answer: input power P20 = 26 W
(specified on data sheet)
According to Ohm’s law, the resistance of the energisation coil can be calculated from the input power as follows:
U 24 [V ]
P
20
26 [W]
Ω
Inductance at initial position:
L
IP
=
IP
· R = 4[ms] · 10 · 22 [ Ω ] = 88mH
Inductance at end position:
L
EP
=
EP
· R = 4,3 [ms] · 10 · 22 [ Ω ] = 95mH
Make sure that the time constants are entered in milliseconds (ms) for these calculations, i.e. time constant values specified in seconds (s) must be multiplied by
10 -3 .
25% duty cycle max. s coil ON time
450
150
75
30
7.5
3
1.5
0.75
0.25
450
225
90
22.5
9
4.5
2.25
0.75
www.kendrionmt.com
Tab. 4 s coil OFF time
1350
10. Operating conditions
Our AC and DC linear solenoids are designed for the following operating conditions:
10.1 An ambient temperature of 35°C. The minimum ambient temperature is -5°C.
10.2 The Relative humidity of the air depends on the ambient temperature and is approx. 50% at
35°C. Higher relative humidities are permissible at lower temperatures. Consideration should be given to the formation of condensation water.
10.3 Please adhere to our installation guidelines when putting the devices into operation.
11. Service life
The service life of devices and associated wear parts depends on the installation and operating conditions, e.g. mounting position, load etc.
12. Notes for DC and AC linear solenoids
12.1 Installation
Connect the plunger to the machine part by means of an interlocking, non-rigid link that allows sufficient play.
12.2 Mounting position
Our DC linear solenoids can be mounted in any position.
The force transfer is preferably in the axial direction.
12.3 Putting into operation
The supply voltage must match the rated voltage as given on the rating plate. The user is responsible for observing the instructions and requirements described in DIN VDE 0580 (July 2000).
12.4 External forces
Make sure that the magnetic forces are always higher than the external forces (adjust force–stroke characteristic if necessary).
12.5 Fuse projection
According to Ohm’s law (P = U x I), the current consumption [A] is calculated from:
I
N
P
U
N
N where PN = rated power (W), UN = rated voltage (V).
Therefore, the appropriate fuse can be selected according to the current calculated.
the technical background
12.6 Unauthorised modifications to solenoids
Unauthorised modifications or changes of any nature are prohibited because they can lead to operational malfunctions. Such unauthorised modifications shall invalidate our guarantee.
12.7 Low Voltage Directive and VDE standards
Electromagnets belonging to this range of products fall under the remit of the Low Voltage Directive 73/23/EEC.
Our products are manufactured and tested to DIN VDE
0580 (July 2000).
13. Ordering information for DC and AC linear solenoids (see product data sheets)
Please provide the following information in your purchase orders: a) Type b) Voltage in VAC or VDC c) Travel s [mm], magnetic force F [N] plus force–stroke characteristic d) Duty cycle (%) or ON time and OFF time [ms/s] e) Number of switching operations f) Dimensions of installation space available g) Details of operating conditions h) IP protection class required (dust protection, water protection)
Wiring recommendations for the operation of electromagnetic devices supplied by Kendrion
Magnettechnik in accordance with the Gesetz
über die elektromagnetische Verträglichkeit von Geräten (EMVG – Electromagnetic
Compatibility of Devices Act).
According to the Act, the electromagnetic compatibility must be guaranteed with regard to immunity to external electromagnetic fields and line-conducted interference. Furthermore, the emission of electromagnetic fields and line-conducted interference must be limited when operating the device.
Owing to the fact that the properties of electromagnetic devices depend on wiring and operation, a declaration of conformity with respect to maintaining the applicable EMC standards is only possible in conjunction with the wiring, but not for the individual devices.
Therefore, wiring recommendations are provided to ensure conformity with the standards.
Where no special details regarding CE conformity for electronic accessories are specified on the product data sheets, the conforming limiting values can be found in the following sections.
Interference immunity to EN 61000-4:
EN 61000-4-2 Electrostatic discharge:
All electromagnetic devices meet the requirements of at least severity level 3 without additional measures.
Electronic accessories meet the requirements of at least severity level 2.
EN 61000-4-3 Electromagnetic fields:
All electromagnetic devices meet the requirements of at least severity level 3 without additional measures.
Electronic accessories meet the requirements of at least severity level 2.
EN 61000-4-4 Transient interference (bursts):
All electromagnetic devices meet the requirements of at least severity level 3 without additional measures.
Electronic accessories meet the requirements of at least severity level 2. Short-term, minor voltage increases can occur with devices 33 43302C00, 33 43303A00 and series 32 17350... in severity level 3 but these do not result in any operational malfunctions.
EN 61000-4-5 Surge voltages:
All electromagnetic devices meet the requirements of at least severity level 3 without additional measures.
Electronic accessories meet the requirements of at least severity level 2.
EN 61000-4-8 Power frequency magnetic fields, EN
61000-4-9 Pulse magnetic fields, EN 61000-4-10
Damped oscillatory magnetic fields:
As the working magnetic fields of the electromagnetic devices are much stronger than the interference fields, the operation of the devices is not affected.
All devices meet the requirements of at least severity level 4. Electronic accessories meet the requirements of at least severity level 3.
EN 61000-4-11 Voltage dips and interruptions: a) solenoids and hydraulic valve solenoids, electromagnetic clamps, latching solenoids and other electromagnetically engaged systems:
The electromagnetic devices switch over to the no-load switching state at the latest after the switching times specified on the product data sheets – according to DIN
VDE 0580 (July 2000). The switching time depends on the triggering and the power conditions (e.g. generator effect of a motor as it runs downs). Voltage interruptions or voltage drops shorter than the release delay to DIN
VDE 0580 (July 2000) do not cause any movement of the plunger. However, the release delay depends on the device and the respective opposing force. Generally, voltages dropping below the long-term permissible tolerance can lead to the holding force falling below the rated value. The user must make sure that a voltagerelated decrease in the holding force or the release of www.kendrionmt.com
the solenoid cannot lead to consequential damage. The operation of the electromagnetic devices and the electronic accessories is maintained when the aforementioned consequential damage is avoided.
b) Proportional and vibration solenoids:
Voltage fluctuations and interruptions can lead to deviations in the vibration amplitude or the plunger position, provided they cannot be compensated for by upstream controllers.
The phase-shift control 33 43303... does not operate as a controller. Just how far the current controllers
33 435... and 33 403... can compensate for voltage fluctuations depends on the solenoid used, the momentary required value and the magnitude of the voltage dip. The user must employ appropriate means to prevent consequential damage as described under a) above.
c) Latching solenoids, permanent electromagnetic clamps and other electromagnetically released systems:
Short-term voltage interruptions and drops can have an effect only on the unlatching or opening function.
The function may not be available from time to time.
The user must ensure that consequential damage cannot ensue.
If the opening function is actuated permanently, the solenoid can switch over to the no-load state as described under a) above. The user must employ appropriate means to prevent consequential damage.
Radio interference suppression to EN 55011:
The electromagnetic devices and electronic accessories belong to EN 55011 group 1. We distinguish between the field-based radiated interference and the lineconducted interference.
a) Radiated interference:
When operating with a DC voltage or a rectified
50/60 Hz AC voltage, all devices comply with the class B limiting values. Electronic accessories conform to at least class A.
b) Conducted interference:
When operating with a DC voltage, the electromagnetic devices comply at least with class A limiting values.
When using the electronic devices 33 403..., 33 435...
and 33 902..., use a filtered DC voltage (residual ripple < 10%). You are recommended to employ capacitors with a capacitance of at least 2200 µF/ADC and a rated voltage of 40 V at 24 VDC or 25 V at 12 VDC.
These should be fitted as close as possible to the consumer. If devices with electronic accessories are operated in a 50/60 Hz AC system, additional suppression measures as shown in Fig. 18 are necessary to achieve class A limiting values.
13
the technical background
Fig. 18 Radio interference suppression
You are recommended to use radio interference suppression capacitors or units sized depending on the electrical connection data of the electromagnetic devices and also on the mains conditions. The radio interference suppression should be installed close to the consumer.
Interference upon switching the electromagnetic devices is generally due to the inductive load. Depending on requirements, the breaking voltage can be limited by inverse-parallel diodes, or by voltage limiters, e.g. varistors, Transil diodes, resistance diodes, etc.
However, these influence the switching times of the devices. Please refer to the technical details of the devices for the appropriate characteristics.
14
14. Class of protection
The class of protection is specified by a code consisting of two letters (IP) and two digits, which vary according to the degree of protection. IEC 60529 specifies the classes of protection. These cover protection against contact, ingress of foreign matter and moisture. The first digit describes the level of protection with respect to contact and ingress of foreign matter. The second digit describes the level of protection with respect to ingress of water. The individual classes of protection are shown in the adjacent table. If the class of protection, for example, of the electrical connection deviates from that of the solenoid, the classes of protection are stated separately, e.g. housing IP 54, terminals IP 00.
1st digit
Protection against intrusion of external particle matter
2nd digit
Protection against penetration of liquids
0 no protection
1 protection against ingress of solid foreign bodies, dia. > 50 mm
2 protection against ingress of solid foreign bodies, dia. > 12 mm
3 protection against ingress of solid foreign bodies, dia. > 2.5 mm
4 protection against ingress of solid foreign bodies, dia. > 1 mm
5 protection against harmful deposits of dust
6 complete protection against ingress of dust
0 no protection
1 protection against drops of condensed water falling vertically
2 protection against drops of liquid falling at an angle ≤ 15° to the vertical
3 protection against drops of liquid falling at an angle ≤ 60° to the vertical
4 protection against liquids splashed from any direction
5 protection against water jets projected by a nozzle from any direction
6 protection against water from heavy sea on ship’s decks
7 protection against immersion in water under stated conditions of pressure and time
8 protection against indefinite immersion in water under stated conditions of pressure www.kendrionmt.com
the technical background
15. Technical data on permanent magnet solenoids, holding electromagnets and locking solenoids
Permanent magnet solenoids (self-holding solenoids)
Devices with a permanent magnet holding system, without a plunger, i.e. with an open magnetic circuit, for holding ferromagnetic workpieces, and an energisation coil which when energised neutralises the permanent magnetic field at the holding surface and enables the workpiece(s) to be detached.
Holding electromagnets
Devices with an electromagnetic holding system, without a plunger, i.e. with an open magnetic circuit, for holding ferromagnetic workpieces.
Ferromagnetic
The magnetic properties of substances with permeability µr » 1.
Open magnetic circuit
All the parts of a holding solenoid influenced by the magnetic flux f, which are supplemented by the workpiece (plunger).
Magnetic poles N (north) S (south)
The places at which the magnetic flux flows into or out of the holding solenoid.
Holding force F
H
The force perpendicular to the holding surface that is required to detach a workpiece when the device is switched on. The figures given on the product data sheets relate to the total holding surface.
Displacement force F
D
The force parallel to the holding surface that is required to move a workpiece when the device is switched on.
This force amounts to 20-30% of F
H depending on the characteristics of the workpiece surface.
Air gap δ
L
The average distance between the holding surface of the solenoid and the bearing surface of the workpiece.
This variable depends on the form and roughness of the opposing surfaces as well as any intervening nonmagnetic substances (e.g. electroplating, paint, scale).
Remanence
The residual holding force between holding solenoid and workpiece when the device is switched off without pole reversal. Depending on the workpiece, this force is equal to 20-40% of F
H
.
Pole reversal
The decay of any remanence between holding surface and workpiece by way of a time- or current-metered opposite pulse. In type 17 1.1 the plunger is released by a spring-operated pin.
Demagnetisation
The reduction of the field strength H in the workpiece.
This takes place with polarity reversal as the amplitude decreases.
Input power PN
(rated input power)
The power consumption at rated current as specified by the manufacturer.
Duty cycle
The relationship of coil ON time to total cycle time, usually expressed as a percentage. Holding electromagnets are normally designed for a 100% duty cycle.
Operating temperature
The temperature rise calculated according to VDE 0580 plus the reference coil temperature. Unless stated otherwise, the reference coil temperature should be taken as
35°C.
IInsulation class
The allocation of the winding insulation to a certain maximum stabilised coil temperature.
Preferred rated voltage
The rated voltage of the majority of devices kept in stock.
Class of protection
The designation of the type of shielding of the device against external influences.
c a
A
1
/A
2 open magnetic circuit magnetic holding surface workpiece
N, S magnetic poles
F
D
D
δ
L
F
H air gap holding force displacement force optimum workpiece thickness
Magnetic flux φ
Every permanent magnet solenoid or holding electromagnet generates a magnetic field at the holding surface between the north and south poles.
The provision of a workpiece closes the open magnetic circuit and the usable magnetic flux φ is reinforced.
The number of perpendicular flux lines per cm 2 that penetrate a surface A determines the flux density or the magnetic induction B.
φ = B · A
The larger the magnetic flux φ penetrating the workpiece for a constant holding surface, or the larger the magnetic induction B, the higher is the holding force F
H
.
F
H
( ) 2
1 +
A
2
)
The holding force is governed by the unfavourable resistance within the magnetic circuit. Therefore, the maximum achievable holding force of a workpiece depends on:
1. the size of the bearing surface
2. the properties of the material
3. the roughness of the bearing surface
4. the coverage of the magnetic holding surface expressed as a percentage
5. the air gap δ
L
Workpiece and bearing surface
The bearing surface is the face with which the workpiece makes contact with the holding solenoid. It is not always equal to the size of the workpiece. The holding force per unit area of a holding solenoid is approximately equal over the entire holding surface. The maximum achievable holding force is determined by the workpiece, primarily by the size of the bearing surface.
Fig. 1 www.kendrionmt.com
15
the technical background
16
Workpiece and material
The components of the holding solenoid that conduct the magnetic flux are made from soft iron with a high permeability. Thanks to the good permeability of these parts, the maximum achievable holding force depends on the permeability of the workpiece and other factors.
The microstructure and composition of the materials vary. Additions of carbon, chromium, nickel, manganese, molybdenum, copper, etc. reduce the permeability. In addition, hardened workpieces bring about a decrease in the holding force. The higher the hardness, the more unfavourable is the permeability (Fig. 2).
The curves plotted in Fig. 3 show that for a certain field strength H, as given by the holding solenoid, the achievable magnetic induction varies for different materials.
B = f (H)
Workpieces with different magnetic characteristics result in different holding forces for the same holding solenoid. Here, it is the saturation induction of a material that influences the maximum achievable holding force.
Fig. 2
Relationship between holding force and material.
Technically pure iron is used with the correction factor fw =
1.
a Armco b St37 steel c St60 steel d Cast steel e Malleable cast iron f 20 Mn Cr 5 g Grey cast iron h HSS (RC 64)
Fig. 3
Magnetisation characteristics of common materials a Armco b St37 steel c St60 steel e Malleable cast iron f Grey cast iron g HSS (RC 64) d Cast steel
H magnetic field strength (A/cm)
B induction (T, tesla)
Workpiece and roughness
Workpieces that are to be held by a magnetic force are seldom 100% flat. The causes of this "roughness" are, for example, material deformations during manufacture, burrs on arrisses, irregularities and cavities in cast parts, unevenness due to machining, etc. The insufficient bearing of a workpiece on the holding solenoid results in air gaps that can lead to a further reduction in the holding force. The air gap δ
L has a permeability
µ = 1. Fig. 5 shows the influence of the air gap. The results of taking into account the size of the air gap and the influence of the material of the workpiece are plotted in Fig. 6.
Fig. 4
Relationship between holding force FH and surface quality
(air gap δ
L
) using the average correction factor f
δ quality to DIN standard).
(surface
Fig. 5
Relative holding force FH in relation to air gap δ
L
.
Fig. 6
Influence of material and air gap δ
L holding force F
H.
a Armco b St37 steel c St60 steel d Cast steel on e Malleable cast iron f Grey cast iron g HSS (RC 64)
Note on calculations
Owing to their properties and form, also their magnetic properties, the workpieces have a major influence on the maximum achievable holding force F
H max
. This means that after selecting the holding solenoid, the maximum holding force varies for different workpieces.
Calculation of correction factor fd from workpiece thickness d and optimum workpiece thickness D: correction factor f d
= –> max. = 1 workpiece thickness D (mm) f d
= d
D www.kendrionmt.com
the technical background
The workpiece thickness D is specified in the holding force diagrams on the product data sheets. Thicker workpieces do not result in an increase in the holding force. And for thinner workpieces there is an approximately linear decrease in the holding force.
Calculation of the max. holding force F
Hmax
100% coverage for
F
Hmax
= F
H
· f δ · f w
· f d
F
H f
δ f w f d holding force in N correction factor for air gap δ correction factor for material
L correction factor for workpiece thickness
If the workpiece simply rests on the magnet and a lateral force is applied, the displacement force F be taken into account.
D must
F
D
=
F
Hmax
4
Reducing the input power P
A reduction in the input power can be achieved without unnecessary power consumption by connecting a regulating transformer at the rectifier on the primary side. The voltage reduction limits the temperature rise in the holding solenoid. The simultaneous decrease in the holding force prevents stressing or simultaneous lifting of several thin workpieces. The holding force F
H of the individual types of device decreases according to the holding force diagram (Fig. 7).
Fixing and grouping
Using several holding solenoids a) A non-rigid fixing is required for every holding solenoid so that each one can adapt to uneven surfaces
(Fig. 8).
b) Every holding solenoid should be spring-mounted below a transverse rail to dampen the stroke acceleration so that in the case of uneven bearing surfaces the difference between the loads carried by the individual magnets does not vary too greatly (Fig. 9).
Fig. 8 Fig. 9
Fig. 8
Fig. 9
Individual fixing
Ideal fixing for group of magnets
Set up a grid when providing solenoids across a larger area (Fig. 10).
Take into account the following aspects: max. and min. plate dimensions, a x b (mm) workpiece thickness d (mm) max. and min. plate weight (kg) material correction factor f w surface quality correction factor f
δ safety factor for stroke acceleration of transverse rail v
(m/s) taking into account max. holding force per solenoid F
H
(N)
Note: Bar-type solenoids are recommended for thin sheet metal. When using round solenoids the concentric pole configuration results in the sheet metal deflecting at the edges, even with a small overhang, and between the magnets, and this leads to a roll-off effect.
Temperature rise
The power input to the energisation coil leads to a temperature rise in the holding solenoid. Depending on the particular device, this lies between 20 and 40°C, although this does not take account of any heat being dissipated to the fixings.
Therefore, the true temperature rise in practice is considerably lower.
Furthermore, the maximum stabilised coil temperature of the energisation coil is not reached when the operating voltage is 10% greater than the rated voltage at the ambient temperature of 35°C as specified in VDE
0580 cl. 19. However, additional heat sources can occur due to the work being carried out and the ambient conditions.
Thermal expansion
The temperature rise leads to an increase in the volume of the device. To calculate the linear thermal expansion of the parts of the holding electromagnet made from magnetic soft iron, use the following equation:
∆ I = I · ∆ t · α st
I · ∆ t · 11,5 · 10
-6
∆ I = increase in length
I = length of device
∆ t
α st
= temperatur rise
= coefficient of linear thermal expansion for steel
These changes should be taken into account for large devices and demanding installation conditions.
Connections and switching procedure
The devices are operated with a DC supply. Provided the ripple factor does not exceed 50%, the supply will not have any noticeable influence on the holding force.
Therefore, no special smoothing is required.
When working with workpieces with a thickness ≤ 1 mm, finer filtering is required because otherwise vibrations can occur. The power consumptions given on the product data sheets are based on 20°C and rated voltage. The device connection options vary, e.g. lead wires, open terminals.
Fig. 7
Holding force F
H plotted against input voltage V, based on
100% coverage of magnetic holding surface.
Fig. 10
Surface grid for equipping a transverse rail (e.g. for conveying thin sheet metal) www.kendrionmt.com
17
18 the technical background
The devices may only be connected to DC supplies no higher than those specified on the rating plates.
Relatively high voltage spikes can occur when switching off groups of holding electromagnets. The magnitude of the spikes depends on the rated voltage of the devices and the breaking time of the switch S (contactor).
They can reach max. 0.6 kV for a 24 V supply, max.
2 kV for 110 V, and max. 4 kV for 230 V. Such voltage spikes can damage semiconductor elements, even ruin them completely. Connecting a resistor in parallel can reduce the magnitude of the spikes. The current then drops to zero via the shunt resistor R par the function: according to
Note for users
Use a pole piece for increasing the holding force in the case of discrete or linear workpiece contact.
Make sure that the pole face quality and the operating temperature relationships are ideal. If several holding systems are used together, ensure that all devices are at the same height and take into account the deflection on long, thin workpieces.
The products are manufactured and tested to DIN VDE
0580 (July 2000).
R par
- ·
L t
= resistor connected in parallel
The chronological progression of the voltage u is then as follows: u = i · R par
R
R par
-
= · U · e L
· t
Therefore, the peak voltage behaves with respect to the operating voltage in the same way as the shunt resistor behaves with respect to the resistance of the energisation coil. The energy stored in the magnetic circuit is converted into heat at the shunt resistor. In practice, a shunt resistor with a value of five times that of the resistance of the energisation coil is used. When using an ohmic resistor, the input power to the device is increased by that of the resistor.
A zinc oxide varistor can be used instead of an ohmic resistor.
External magnetic fields
Permanent magnet solenoids may not be subjected to any other strong magnetic fields.
External heat sources
The heat generated by the device itself plus heat from any external sources may not lead to a temperature exceeding 80°C in the permanent magnet solenoid (or exceeding 120°C in a holding electromagnet).
16. Technical data on inline vibrators, curved motion vibrator and vibrating solenoids
Vibrating solenoids are electromagnetic systems that perform cyclic, sine wave-form oscillations. They function according to the principle of an oscillator with a pair of eccentric weights operating at the mains frequency.
The oscillation frequency f is the frequency with which the device vibrates. In the normal case operating frequency = mains frequency.
The maximum air gap amax of a vibrating solenoid is the average air gap occurring during operation at which the permissible temperature rise of the energisation coil is not exceeded.
Vibrators are oscillating devices that are capable of vibrating irrespective of the installation position.
The vibration amplitude s of a vibrating solenoid is the difference between the maximum and minimum sizes of the air gap during operation.
Sprung amplitude, sprung component, sprung mass and sprung load relate to the part capable of oscillating with which a useful effect is achieved.
Unsprung amplitude, unsprung component, unsprung mass and unsprung load relate to the part not capable of oscillating with which no useful effect is achieved.
The optimum load for inline vibrators is the vibrating conveyor weight that permits the installation of a standard device.
The rated power P
S
(rated input power) is the power consumption at rated current and rated air gap.
Preferred voltages are the voltages of the standard devices, e.g. 230 VAC, 50 Hz.
The reference coil temperature is the stabilised coil temperature in the non-energised state for the intended application. (This is important when vibrating devices are mounted on other devices with a temperature differing from the ambient temperature.)
The i nsulation class specifies the maximum temperature for the insulation of the windings
Class of protection designates the degree to which the device is protected against external influences, e.g.
device IP 40, connection IP 64.
www.kendrionmt.com
the technical background
Design directive
Kendrion vibrating solenoids and vibrators are manufactured and tested according to DIN VDE 0580 (July 2000)
“Provisions for electromagnetic devices”.
The classes of protection are based on IEC 60529 and are specified on the data sheets.
CE
The electromagnetic products from Kendrion
Magnettechnik are components for incorporation and operation in electrical equipment and devices. They therefore do not fall within the remit of the Low Voltage
Directive 73/23/EEC.
The user must ensure conformity with the EMC Directive
89/336/EEC by using corresponding switching devices or controls. When using the recommended Kendrion accessories, conformity with the EMC Directive is stated on the respective data sheets.
Types
Vibrating solenoids, vibratory drives
OSR series (Fig. 1)
Maintain operating air gap (1-3 mm)
Armature plate
Permanent magnet
Vibrating element
Vibrator
The magnetic system of the vibrating solenoid is encapsulated in a plastic housing. It consists of two energisation coils and the two halves of the solenoid, the undersides of which are connected by a permanent magnet. The magnetic circuit is completed by the object to be vibrated, which represents the armature, via the air gap. If the object to be vibrated is made from a non-magnetic material, a corresponding armature plate must be included.
The permanent magnet incorporated in the solenoid premagnetises the system and this creates a constant attraction between the solenoid and the armature.
When an AC voltage is applied to the energisation coil, the force effect of the electromagnetic alternating field is superimposed on the force effect of the permanent magnet. The frequency of the resulting force matches the frequency of the AC voltage applied, which moves the armature in the same rhythm. In order to achieve the desired vibratory motion, the sprung load, i.e. the object to be vibrated, must be fixed to a base plate by rubbermetal connections, compression springs or leaf springs
(see type OSR501002).
Vibrators/Linear drives
Types OLV504... (Fig. 2)
Device socket
Mounting flange
Device plug
Armature
Bearing Permanent magnet Coil Spring
The solenoid of the linear vibrator consists of a round steel housing. The energisation coil and the armature, which is guided concentrically via a non-magnetic shaft and held in the central position by two springs, are fitted inside the solenoid. A permanent magnet with guiding poles, which is located between the two energisation coils, pre-magnetises the system. The resulting forces acting on the armature are balanced by the arrangement of the guiding poles. When an AC voltage is applied to the energisation coil, the force effect of the electromagnetic alternating field is superimposed on the force effect of the permanent magnet. The frequency of the resulting force matches the frequency of the AC voltage applied, which moves the armature and the shaft in the same rhythm. The linear vibrator can be used as a vibratory drive and, fitted with an additional weight on the armature shaft, as a vibrator.
www.kendrionmt.com
Inline vibrators
Type OMW516002 (Fig. 3)
Armature plate
Sprung component
Unsprung component
Leaf spring
Base
Solenoid
(energisation coil + frame)
In the inline vibrator the solenoid and its energisation coil are fixed to a base. Mounted above this is the armature plate, with pole faces separated by an air gap and parallel with those of the solenoid. Leaf springs positioned at an angle (approx. 20°) connect the armature plate to the base. An attracting force prevails between the armature and solenoid. When an AC voltage is applied to the energisation coil, the force effect of the electromagnetic alternating field is superimposed on the force effect of the permanent magnet (type OMW516004). The frequency of the resulting force matches the frequency of the AC voltage applied, which moves the armature in the same rhythm. The angled arrangement of the leaf springs causes the armature plate, and the vibrating conveyor attached to this, to perform a curving oscillatory movement and therefore convey loose materials in one direction.
In the case of larger or relatively wide vibrating conveyors it is better to use several smaller inline vibrators rather than a single large one.
Curved motion vibrator
Type OAB513001 (Fig. 4)
The solenoid of the curved motion vibrator, fixed rigidly to the base of the device, consists of two annular shells which enclose the energisation coil. The armature, comprising two annular permanent magnets with opposite poles arranged axially and two pole discs in each case, is located between leaf springs fixed on opposite sides of the base of the device. The system is pre-magnetised by the two permanent magnets. In the stationary condition one annular pole of the solenoid is located between each pair of pole discs of the armature. When an AC voltage is applied to the energisation coil, the unlike poles of armature and solenoid attract. The frequency of the curving armature movement matches the frequency of the AC voltage applied.
19
the technical background
Fig. 4: Curved motion vibrator (OAB513001)
1 Solenoid
2 Energisation coil
3 Armature
4 Permanent magnet
5 Spring
6 Base
Vibrating solenoids
OAC... series (Fig. 5)
Sprung load
Sprung component
Vibrating solenoid
Unsprung load
Unsprung component
Armature plate
20
The curved motion vibrator can be used as a vibratory drive and, fitted with an additional weight on the armature shaft, as a vibrator.
Vibrating solenoids are primarily incorporated in spring–mass systems that constantly exploit the resonant frequency proximity of the entire vibrating system (drive and sprung device). The vibrating solenoid generates directional, linear oscillations in the sprung device.
Coil and bobbin are encapsulated in casting resin.
They are therefore not susceptible to moisture and dust and thus suitable for rough conditions.
The direction of the oscillations is achieved by the geometrical arrangement of the springs, which means that, for conveying, a certain oscillating angle is always necessary. The effective amplitude here corresponds to twice the amplitude of the oscillating frequency of the whole system. Vibrating solenoids can be infinitely regulated via the operating voltage. They reach the full conveying power immediately after being switched on and there are no troublesome imbalance effects upon starting and stopping. This is particularly important for metering, packaging, etc.
s s
Tuning c cs fo fa a) Explanation of symbols used
= natural frequency
= operating frequency
= mains frequency
= spring constant
= spring constant of rubber buffer in shearing direction d m
F
Hz
Hz
N/mm
= spring thickness
= weight of unsprung component
N/mm mm of oscillator with 2 eccentric weights kg m
N m
R
= weight of sprung component of oscillator with 2 eccentric weights kg
= resultant weight m
R = m m
N
. m
F
N + m
F kg s
F a
N
1N
= vibration amplitude of unsprung mm component
= vibration amplitude of sprung mm component
= total vibration amplitude s = s
F
+ s
N mm
= air gap
= 0.102 mm kg b) General
All vibrators must be detuned for reasons of amplitude stability, i.e. the natural frequency f o of the device must not be equal to the operating frequency f a
. As a rule, the detuning amounts to 10-20%. All vibrators used for conveying purposes must be tuned subcritically, i.e. the natural frequency f o of the system must be greater than the operating frequency f a
.
The resonance curve is damped by the loose materials being conveyed (Fig. 6). Both subcritical and supercritical tuning results in the amplitude being reduced from a (A) to b (B).
Subcritical tuning
Supercritical tuning
1
Damped curve
Fig. 6: Vibration amplitude s plotted against the ratio of operating frequency f a to natural frequency f
0
.
Notes:
- to DIN VDE 0580 (July 2000) ICS29.020.53.020.01
(valid as manufacturer’s Declaration of Conformity)
- directives 98/37/EC and 73/23/EEC
- CCC certificate for China not required
We reserve the right to make changes to the product design.
Tuning a pair of eccentric weights
All vibrators work on the principle of a pair of eccentric weights, i.e. both the sprung load and the unsprung load perform oscillations. This must be taken into account in the tuning. In vibrating devices in which the tuning is achieved by selecting suitable springs, the following equation applies when calculating the necessary spring constant: c = mr f 2
0
25 where f
0
≈ 10 . . . 20% > fa
The resulting weight mr is made up of the weight of the sprung component mN plus the weight of the unsprung component m
F
.
m mr = m
N
N
· m
F
+ m
F
If the unsprung load is considerably larger than the sprung load (factor of 50), the spring constant required can be calculated as follows: c = m
N f
2
0
25 where f
0
≈ 10 . . . 20% > fa
In vibrating devices with a predefined spring configuration, tuning can be achieved by adapting the sprung load. The following equation applies: m
N
= m
F c · mF f
2
0
25
- c where f
0
≈ 10 . . . 20% > fa
If the unsprung load is considerably larger than the sprung load (factor of 50), the sprung load can be calculated as follows: m
N
= c · 25 f
0
2 where f
0
≈ 10 . . . 20% > fa
As the sprung and unsprung loads always consist of two components, to calculate these weights, or rather the bearing weights, the component weights of the device
(m plunger and m frame
) are given in Table 1.
m
N
= m plunger m
F
= m frame
+ m bearing
+ m attachment
The strokes of the individual loads behave inversely to their weights.
s
N s
F
= m
F m
N
In order that a favourable sprung amplitude is achieved with vibratory drives, the ratio unsprung load should be >12 sprung load www.kendrionmt.com
the technical background
17. Technical data on AC and 3-phase solenoids
Installation and operating guidelines
AC and 3-phase solenoids may not be overloaded because otherwise there is a risk of the delayed switching procedure resulting in damage to the energisation coil through an excessive temperature rise, or the upstream fuse being tripped. On the other hand, the devices should be operated with at least two-thirds of their magnetic force to avoid premature wear of the pole faces due to excessive impacts.
The strokes specified on the product data sheets may not be exceeded. Make sure that the stroke does not increase due to, for example, wear (i.e. distance travelled by plunger from initial to end position). Once the making procedure has been completed, the pole face of the plunger must lie flat on the pole face of the solenoid body (frame).
If a plunger stopper is necessary or unavoidable before the end of the stroke, a sprung element must be fitted between this and the end position of the plunger in order that the plunger can still reach its end position.
During installation, pay special attention to the play of the plunger. The direction of force of the load to be actuated must coincide exactly with the axis of movement of the plunger. A rigid joint between the plunger and the part of the machine to be actuated is undesirable.
Instead, an articulated connection, e.g. with lugs or similar, is essential.
Input power (rated input power) is the power consumption at the rated current. The pull-in power
(input power during response) is the apparent power ensuing after transient phenomena have decayed when the plunger is held in its initial position.
For a 3-phase linear solenoid the power is as follows:
P
A
= √ 3 · U · I
A
Holding power (input power while holding) is the apparent power ensuing after transient phenomena have decayed when the plunger is in the end position.
For a 3-phase linear solenoid the power is as follows:
P
H
= √ 3 · U · I
H the rated current for devices with a voltage coil is based on the rated voltage and 20°C coil temperature at the rated frequency. Unless stated otherwise, this is taken to be the rated holding current I
H
.
For a 3-phase linear solenoid the current is as follows:
I
H
=
P
H
U · √ 3
Supply voltage and fuse protection
Three-phase solenoids can be connected in the conventional way at the motor terminal box in a delta or star configuration by rearranging the jumpers.
If the device can be connected to several supply voltages, pay attention to the labelling of the terminals.
I
A
P · 1000 P
= A or I
A
A
· 1000
=
U √ 3 · U
P
A
= pull - in power
U = rated voltage kVA
V
It is advantageous to use fuses with a thermal trip. (Ask your supplier about the breaking current allocation of such elements.) Powerful energy sources must be available owing to the high pull-in power and the supply lines must be of such a size that no inadmissible voltage drop can take place when switching on.
Rs
Rw = R
20
R
XL
Rs
R
W
R
XL
= apparent resistance
= ohmic resistance
= inductive resistance
Magnetic force upon change of frequency
∆ F
M
( ) 2
M
- F
M
F
M
= magnetic force
Inductance calculation
R
R
XL
XL
= L · ω —> ω = 2 π f
= L · 2 π f
L =
R
XL
2 π f
V ·s f = mains frequency
[ ]
A
Fig. 1 shows the most common AC solenoid systems available on the market today. In recent years the system shown in Fig. 1a has been used primarily as a vibrating solenoid (see OAC series). Vibrating solenoids are used wherever the harmonic vibration of a mechanical part of an assembly is desirable. Typical applications are vibrating sorting systems, feeders, vibrating conveyor belts, special pumps, vibratory plant for the building industry, massage appliances, etc. The electrical connection to the AC mains supply is either direct or via a half-wave rectifier. Accordingly, the mechanical amplitude is either 50 or 100 oscillations per second.
Fig. 1 The most common AC solenoid systems available on the market today.
21 www.kendrionmt.com
22 the technical background
The clapper-type armature shown in Fig. 1b is used almost exclusively in the design of relays, where it actuates the contact bridges via L-shaped levers.
Clapper-type armatures have only a small stroke and a low work capacity.
Diverse AC solenoid systems have been developed over the course of time to comply with particular specifications. The best known, and certainly also the most efficient, types are shown in Fig. 1. Of course, this illustration does not claim to be exhaustive because besides these conventional designs a large number of special assemblies have been built for specific purposes. One particular feature is common to all AC solenoids apart from very small, low-power versions. The active iron parts, i.e. frame and plunger, are made from laminations. The intention behind this is to minimise the eddy current losses caused by the alternating magnetic field. Eddy current losses occur in the form of heat and reduce the work capacity of the solenoid. Hysteresis losses and losses in the cage winding are further sources of heat. For these reasons, an AC solenoid cannot achieve the work capacity of a DC solenoid operating under the same conditions, i.e. identical copper and iron weights and same operating temperature.
In contrast to this, the superiority of the AC solenoid is undisputed where large strokes and short switching times are required. Furthermore, an AC solenoid can be connected easily and directly to any AC mains supply, whereas a DC solenoid will in most cases require a rectifier between supply and solenoid.
The magnetic field in the air gap of an AC solenoid is also the seat of the energy and has the ability to convert magnetic energy into mechanical energy as the plunger responds. The degree of efficiency, i.e.
the ratio of the mechanical energy to the mains energy consumed, depends on the stroke. Tests have resulted in figures of about 3.5% for long and about
23.5% for short strokes. The magnetic leakage of the various AC solenoid systems is essentially determined by the geometric form of the plunger and the magnetic circuit.
This influences the form of the force-stroke characteristic to a large extent. It is possible to control the characteristic to a certain extent through local repositioning of the working air gap.
The kinetic energy that occurs when an AC solenoid responds gradually increases with the length of the stroke. Furthermore, it is also influenced by the type of load - constant weight, linear spring, etc. - and by the degree of utilisation. This results in a maximum operating stroke, taking into account the work capacity. In the interests of an economic service life and proper functioning, it is not advisable to exceed this maximum stroke. Special features in 3-phase solenoids such as a spring-mounted frame and air-damping enable the destructive deformation energy to be kept within acceptable limits.
In accordance with the current-stroke dependency of the AC solenoid, it is necessary to position the plunger parallel with the frame. Every residual air gap and hindrance to the response procedure due to, for example, sluggish operation in the plunger guides, increases the thermal load on the device and can lead to burn-out of the coil.
The force transfer can only be in the axial direction.
The response procedure may not be delayed. www.kendrionmt.com
the technical background
18. SI units and symbols used in equations
Symbol Meaning SI unit Name l t m
SI base units length mass time, time-span, duration s m metre kg kilogram second
I electric current A ampere
T, Θ temperature, K kelvin thermodynamic temperature l h
L
Geometry
A, S area a m 2 square
(surface, cross-sectional) metre distance, clearance, m metre spacing
, , plane angle b, w width d, , t thickness, rad radian m metre m metre layer thickness, diameter air gap m metre height length m metre m metre r radius m metre s distance covered, path m metre
V, τ volume
τ
p pole pitch m 3 cubic metre m metre f g a n v t
T,
Time acceleration local gravitational acceleration m/s 2 angular acceleration rad/s 2 frequency Hz hertz m/s 2 rotational speed s -1 angular velocity
τ
time constant time, time-span, duration s s rad/s velocity m/s second second
Symbol Meaning SI unit Name
E
F
J
G, F
W
Mechanics modulus of elasticity, N/m 2
Young’s modulus force N Newton weight N Newton moment of inertia, kgm 2 kilogramsecond moment of area square metre
M m
P torque mass power
Nm newtonmetre kg
W kilogram watt, p
ρ
σ pressure density
Pa kg/m direct, tensile, compressive N/m 2
3
1 J/s = 1 W pascal
W
η and bending stress energy, work J degree of efficiency 1
, f coefficient of friction 1 joule
L
B
Φ
H
Symbol Meaning SI unit Name
Magnetism magnetic flux density, t magnetic induction magnetic flux tesla
Wb weber magnetic field strength, A/m magnetic energisation inductance, self-inductance, H henry mutual inductance
T
Heat coefficient of resistance 1/k temperature, K kelvin thermodynamic temperature t Celsius temperature °C
∆ T= ∆ t temperature difference, K kelvin
=∆ϑ excess temperature
X
Z
C
I
G
P
R
S, P s
U
Electricity electric capacitance F farad electric conductance S siemens electric current A ampere actual power electric resistance apparent power voltage, electric
W
W
V watt ohm watt volt potential difference reactance impedance ohm ohm www.kendrionmt.com
23
kendrion magnettechnik worldwide
Kendrion Magnettechnik GmbH
August-Fischbach-Strasse 1
78166 Donaueschingen
Germany
Tel. +49 (0) 77 1 80 09-0
Fax +49 (0) 77 1 80 09-63 4 www.kendrionmt.com
info@kendrionmt.com
Engelswies Works
Fred-Hahn-Strasse 33
72514 Inzigkofen-Engelswies, Germany
Tel. +49 (0) 75 75 20 8-0
Fax +49 (0) 75 75 20 8-1 90 www.kendrionmt.com
info@kendrionmt.com
Kendrion Binder Magnete
Ges.m.b.H.
8552 Eibiswald 269, Austria
Tel. +43 (0) 34 66 42 32 2-0
Fax +43 (0) 34 66 42 72 2 office@kendrion.com
Kendrion Binder Componentes,
S.L.
Parque Industrial “El Poligono” c/.Rio Arba, 25
50410 Cuarte de Huerva /
Zaragoza, Spain
Tel. +34 9 76 46 30 40
Fax +34 9 76 46 30 42 guadalupe.cabrera@kendrion.com
Technical offices (Germany)
Kendrion Magnettechnik GmbH
Technisches Büro West
Bottroper Strasse 15
46244 Bottrop
Tel. +49 (0) 20 45 41 34 34
Fax +49 (0) 20 45 40 64 26 www.kendrionmt.com
wilhelm.martin@kendrion.com
Kendrion Magnettechnik GmbH
Technisches Büro Nord
Delmer Bogen 71
21614 Buxtehude
Tel. +49 (0) 41 61 73 37 77
Fax +49 (0) 41 61 60 07 39 3 www.kendrionmt.com
reinhard.lenser@kendrion.com
Representatives (Germany)
VOR-Steuerungstechnik
Friedrich Rudolph GmbH
Wichernstrasse 9
50389 Wesseling
Tel. +49 (0) 22 36 94 27 88
Fax +49 (0) 22 36 84 27 86 info@vor.de
www.vor.de
Claus Kähne
Industrievertretungen GmbH
Kurmainzer Str. 199a
65936 Frankfurt
Tel. +49 (0) 69 34 05 90 20
Fax +49 (0) 69 34 05 90 27 kaehne.gmbh@t-online.de
RUG
Regler- und Gerätebau GmbH
Karl-Ehmann-Str. 50
73037 Göppingen
Tel. +49 (0) 71 61 85 70
Fax +49 (0) 71 61 85 72 9 jurenka@r-u-g.de
Antriebstechnik Laipple GmbH
Burgstrasse 84
73614 Schorndorf
Tel. +49 (0) 71 81 97 94 92
Fax +49 (0) 71 81 97 94 93 antriebstechnik-laipple@t-online.de
Winfried Kerner GmbH
Ingenieurbüro
Kiebitzweg 11
85375 Neufahrn
Tel. +49 (0) 81 65 52 45
Fax +49 (0) 81 65 62 12 8 www.kerner-gmbh.de
kerner-gmbh@t-online.de
Hans-Christian Pilder
Wirtschaftsingenieur
Ablers 119
88175 Scheidegg
Tel. +49 (0) 17 17 23 13 31
Fax +49 (0) 83 81 94 87 62 www.kendrionmt.com
kendrion@pilder.de
Representatives (worldwide)
Austria
Kendrion Binder Magnete
Vertriebs. GmbH
Estermannstrasse 27
4020 Linz
Tel. +43 (0) 7 32 77 63 83
Fax +43 (0) 7 32 78 35 58 www.kendrion-binder.at
office@kendrion-binder.at
Belgium, Luxembourg
Bintz technics N.V.
Brixtonlaan 25
1930 Zaventem
Tel. +32 (0) 2 7 20 49 16
Fax +32 (0) 2 7 20 37 50 www.bintz-technics.be
info@bintz.be
Canada
VL Motion Systems Inc.
1105 Goodson Cres.
Oakville, Ontario L6H4A7
Tel. +01 905 842 0244
Fax +01 905 844 1293 vince@vlmotion.com
Denmark
Lind Jacobsen & Co. A / S
Blokken 62
3460 Birkerød
Tel. +45 (0) 45 81 82 22
Fax +45 (0) 45 82 10 22 www.lind-jacobsen.dk
strong@lind-jacobsen.dk
Desim Elektronik APS
Tasingevej 15
9500 Hobro
Tel. +45 (0) 70 22 00 66
Fax +45 (0) 70 22 22 20 www.desim.dk
desim@desim.dk
Farstrup & Benzon A/S
Engholmvej 1, Saunte
3100 Hombaek
Tel. +45 (0) 49 70 40 33
Fax +45 (0) 49 70 40 32 www.safeline.dk
f&b@safeline.dk
Finland
SKS-mekaniikka Oy
Martinkyläntie 50
P.O. Box 122
01721 Vantaa
Tel. +358 (0) 98 52 66 1
Fax +358 (0) 98 52 68 20 www.sks.fi
mekaniikka@sks.fi
Moeller Electric Oy
Sahaajankatu 24
00811 Helsinki
Tel. +358 (0) 9 25 25 21 00
Fax +358 (0) 9 25 25 21 77 www.moeller.fi
info.fin@moeller.net
France
Binder Magnetic
1, Allée des Barbanniers
92632 Gennevilliers Cedex
Tel. +33 (0) 1 46 13 80 80
Fax +33 (0) 1 46 13 80 99 info@binder-magnetic.fr
Italy
SPII S.p.A
Via Don Volpi 37
21047 Saronno (VA)
Tel. +39 (0) 2 96 22 921
Fax +39 (0) 2 96 09 611 www.spii.it
info@spii.it
Netherlands
Solar Electro B. V.
Effect 5
6921 RG Duiven
Tel. +31 (0) 26 3 65 29 11
Fax +31 (0) 26 3 65 23 90 www.solarelektro.nl
algemeen@solarelektro.nl
GTI Electroproject B.V.
Grote Tocht 102
1507 CE-Zaandam
Tel. +31 (0) 75 68 11 11 1
Fax +31 (0) 75 63 54 00 3
Norway
Industrielementer AS
Postboks 43
1556 Son
Tel. +47 (0) 64 95 81 32
Fax +47 (0) 64 98 29 29 www.industrielementer.no
post@industrielementer.no
siv. ing. J.F. Knudtzen A/S
Billingstadsletta 97
1396 Billingstad
Tel. +47 (0) 66 98 33 50
Fax +47 (0) 66 98 09 55 www.jfk.no
firmapost@jfk.no
South Africa
Magnete Service Binder
P.O. Box 44051
2104 Linden
Tel. +27 (0) 11 46 2-32 08
Fax +27 (0) 11 46 2-33 04 info@binder.co.za
Spain, Portugal
Binder Magnete Iberica S.L
.
Apartado de Correos 116
Costa Zefir 99
43892 Miami-Playa (Tarragona)
Tel. +34 9 77 17 27 07
+34 9 77 81 04 29
Fax +34 9 77 17 01 82 www.binder-es.com
binder@binder-es.com
Sweden
Industrikomponenter AB
Industrivägen 12
17148 Solna
Tel. +46 (0) 8 51 48 44 00
Fax +46 (0) 8 51 48 44 01 www.inkom.se
info@inkom.se
Uno Gunnarsson / Höör AB
Box 64
24322 Höör
Tel. +46 (0) 4 13 24 54 0
Fax +46 (0) 4 13 23 18 3
Moeller Electric AB
Granitvägen 2
55303 Jönköping
Tel. +46 (0) 86 32 30 00
Fax +46 (0) 86 32 32 99
Switzerland
Kendrion Binder Magnet AG
Albisstrasse 26
8915 Hausen a/A
Tel. +41 (0) 17 64 80 60
Fax +41 (0) 17 64 80 69 www.kendrion.ch
binder.magnet@kendrion.com
United Kingdom
Kendrion Binder Magnete
(U.K.) Ltd.
Huddersfield Road, Low Moor
Bradford, West Yorkshire,
BD12 0TQ
Tel. +44 (0) 12 74 60 11 11
Fax +44 (0) 12 74 69 10 93 www.kendrion-binder.co.uk
sales@kendrion-binder.co.uk
USA
Gradframe Inc.
950 E. Baldwin Road
Palatine IL 60074
Tel. +01 847 991 1788
Fax +01 847 991 1788 gradframe@aol.com
This publication is for information purposes only and should not be regarded as a binding presentation of the products, unless we expressly confirm otherwise.
We reserve the right to make changes to the specification, form, price and availability of the products described herein at any time without prior notice.
Each product may be used only for its intended purpose.
We reserve to make changes to the product design.
www.kendrionmt.com