STABILIZATION OF UNSTABLE STEADY STATES AND UNSTABLE
advertisement

STABILIZATION OF UNSTABLE STEADY STATES AND UNSTABLE
PERIODIC ORBITS BY FEEDBACK WITH VARIABLE DELAY∗
A. GJURCHINOVSKI1 , V. URUMOV2
1
Institute of Physics,
Faculty of Natural Sciences and Mathematics,
Saints Cyril and Methodius University, P. O. Box 162, 1000 Skopje, Macedonia
E-mail: agjurcin@pmf.ukim.mk
2
Institute of Physics,
Faculty of Natural Sciences and Mathematics,
Saints Cyril and Methodius University, P. O. Box 162, 1000 Skopje, Macedonia
E-mail: urumov@pmf.ukim.mk
Received September 5, 2011
Stabilization of dynamical systems is of important practical interest in many
branches of science and its applications. Two decades ago Pyragas proposed a method
for stabilization of unstable periodic orbits which turned out to be also useful for stabilization of unstable states. The method is based on feedback proportional to the difference of a current value of some of the variables of the system and its value some time
in the past. One of the merits of the method is its non-invasiveness, as the feedback vanishes when the desired state is attained. We show that the stabilization is more easily
achieved if the delay is modulated in some appropriate manner, and further generalize
some previously proposed extensions of the method.
Key words: Delayed feedback control, Chaos, Nonlinear dynamics.
PACS: 05.45.Gg, 02.30.Ks.
1. INTRODUCTION
Differential equations are common tool to describe natural phenomena and to
model behaviour of technical devices, living matter or societal issues. In order to
obtain some desirable evolution of the system under consideration some intervention
from outside could be applied which modifies the primary equations. In simplest
terms this is the issue that represents the main topic of control theory. One should
immediately emphasize the important practical value in applications in many fields,
like transport, industrial processes and medical treatments. The subject of control
in theory and experiment has attracted increased attention of physicists in last two
∗
Paper presented at the 12th International Balkan Workshop on Applied Physics, July 6-8, 2011,
Constanţa, Romania
RJP 58(Nos.
Rom.
Journ. Phys.,
1-2),
Vol.
36–49
58, Nos.
(2013)
1-2, P.(c)
36–49,
2013-2013
Bucharest, 2013
2
Stabilization of unstable steady states and unstable periodic orbits
37
decades in connection with the widespread presence of nonlinearity and the interest
in intimately related chaotic behaviour quite common in various branches of sciences
[4, 6, 21, 40].
The time-delayed feedback control (TDFC) has been suggested in 1992 by
Pyragas [30, 31] as a method to stabilize unstable periodic orbits commonly present
in chaotic nonlinear systems. In comparison with other approaches, the Pyragas
method is much more flexible for practical purposes and quite robust with respect
to the effects of noise. The flexibility of the method is due to the fact that the exact
positions of the periodic orbits, i.e. the equations that describe the dynamics of the
system, need not be available for the experimenter, and the control signal is not external, but it is some dynamical variable of the system itself. The Pyragas control
force is in the form of a continuous feedback proportional to the difference between
the state of the system at time t and its past state at time t − T , where T is a control
parameter denoted as time delay or simply delay. To control unstable periodic orbits,
the delay T is adjusted to match the period of the unstable periodic orbit that should
be stabilized. This additional intervention to the system keeps unchanged the periodic trajectory governed by the primary equations of the system. It only changes its
stability for some suitable values of the parameters of the system. When the stabilization is achieved the control signal vanishes, meaning that the controlled orbit remains
a solution of the equations that describe the dynamics of the original system. This
property of the Pyragas method is known as non-invasiveness. For stabilization of
unstable steady states, the choice of the parameter T is not as restrictive as in the case
of unstable periodic orbits, and the interval of T for which the control is successful
is system-dependent. In this case, it has been shown that the delay time is correlated
with the characteristic time scale of the system determined by the imaginary parts of
the eigenvalues of the unstable fixed points [7, 18, 43].
The Pyragas method was successfully implemented in a variety of experimental
setups, and the efficiency of the method was tested against different kinds of theoretical models from different areas [5, 11, 17, 22, 23, 27, 28, 32, 38, 42]. In parallel
to various practical applications of the control method, an effort has been put into
progress to generalize or modify the original control scheme in order to improve
its performance [9, 10, 19, 20, 25, 26, 29, 33–36, 39]. A generalization of the Pyragas method was proposed by Socolar, Sukow and Gauthier in 1994 [41], where the
feedback signal was taken in the form of a geometric sum (extended time-delayed
autosynchronization), or a mean value of a finite number of delay terms (N timedelayed autosynchronization), each using information from many previous states of
the system involving integer multiples of the delay T . A natural extension of this
method was proposed by Ahlborn and Parlitz in 2004 [1, 2], using two or more delayed feedback signals with generally incommensurate delay times. With the introduction of the additional control parameters, these multiple delay extensions achieve
RJP 58(Nos. 1-2), 36–49 (2013) (c) 2013-2013
38
A. Gjurchinovski, V. Urumov
3
stabilization of unstable states with a higher degree of instability.
The efficiency of the Pyragas method to control unstable steady states can
be significantly improved by applying a variable time-delay in the original control
scheme [12–16]. We call this method a variable-delay feedback control (VDFC). In
this case, the modulation of the delay is in a fixed interval around some nominal delay value, and it could be realized in a deterministic or a stochastic way. Stochastic
changes in the delay time are natural due to the omnipresent noise in any physical
system. In the circumstances, the enhancement of noise along the delay line could
be desirable as it is leading to improved stability of the system. On the other hand
the modulated delay described by some deterministic function could be realized for
example by periodically changing some characteristic distances in electric or laser
systems by introducing piezoelements.
In the following we will first consider the generic case of an unstable stationary
point of the focus type and will apply the variable delay scheme as a further extension
to the previous generalizations [1, 41]. These generalizations are regarded as the
most efficient extensions of the original Pyragas method. For both cases we observe
significant increase of the area in the parameter space leading to stabilization of the
unstable focus. Next, we consider the effect of variable delay on stabilization of
unstable periodic orbits in the Rössler system.
2. THE EFFECTS OF THE VARIABLE DELAY IN TWO EXTENSIONS OF THE PYRAGAS
METHOD
To begin, we consider the extended time-delay autosynchronization control
method introduced by Socolar, Sukow and Gauthier [41]. The feedback signal is
in the form of an infinite number of terms of the Pyragas type. It introduces an additional control parameter R which has a role of a weight factor through which the
influence of the past states of the system could be regulated. The control force can
be written as:
∞
X
F(t) = K
Rn {x[t − (n + 1)τ ] − x[t − nτ ]} ,
(1)
n=0
where K is the feedback gain, τ is the constant time-delay, and R ∈ (−1, 1) is the
memory parameter. In the case R = 0, the control force is reduced to the one in the
original Pyragas method. From the form of the feedback force one can easily notice
that when the control of the target unstable state (fixed point or periodic orbit) is
reached, the control force asymptotically vanishes for any value of R in the interval
R ∈ (−1, 1), and in this sense the control is non-invasive.
We investigate the efficiency of this scheme by applying a deterministic modulation of the delay τ in a fixed interval around a nominal delay value T0 . We consider
RJP 58(Nos. 1-2), 36–49 (2013) (c) 2013-2013
4
Stabilization of unstable steady states and unstable periodic orbits
39
the case when the modulation frequency is large enough for the variable-delay system
to be analytically explored through the comparison distributed-delay system [24].
This modification of the method is then used to stabilize the unstable fixed point of
a focus type, which is a generic model of unstable steady state. We assume that the
linearised system in centre manifold coordinates can be written as:
λ ω
x(t)
ẋ(t) =
−ω λ
∞
X
+K
Rn {x[t − (n + 1)τ (t)] − x[t − nτ (t)]} ,
(2)
n=0
where x = col(x, y), and
τ (t) = T0 + εf (νt)
(3)
is the function that determines the variation of the delay around the nominal value T0 .
We assume that f (t) is periodic and limited by |f (t)| < 1. The rest of the parameters
are the amplitude ε < T0 and the frequency ν of the delay modulation. The stability of
the uncontrolled system is determined by the eigenvalues Λ0 = λ ± i ω. By choosing
λ > 0 i ω 6= 0 we model an unstable focus at the origin.
In the following we will consider two specific modulation functions f (νt):
sawtooth wave
2
π
t
−
,
t ∈ [0, π) ,
π
2
(4)
f1 (t) =
2 3π
− t , t ∈ [π, 2π) ,
π 2
and square wave
−1, t ∈ [0, π) ,
f2 (t) =
(5)
1, t ∈ [π, 2π) .
According to the theorem in [24] the corresponding distributed-delay system weight
functions are given by w1 (η) = 1/2 and w2 (η) = (δ(η − 1) + δ(η + 1)) /2.
Taking the usual Ansatz x(t), y(t) ∼ exp(Λt), the characteristic equation for
the determination of the eigenvalues Λi , valid in the asymptotic domain of very large
frequencies ν of modulation functions f1,2 (νt), reads as follows:
Z 1
exp[Λ(εη − T0 )] − 1
dη = 0.
(6)
Λ − λ ∓ iω − K
w(η)
1 − R exp[Λ(εη − T0 )]
−1
The equation has an infinite number of roots which are generally complex numbers.
The stationary point without being displaced becomes stable after the introduction of
the feedback terms only if the real parts of all roots of the characteristic equation are
negative.
RJP 58(Nos. 1-2), 36–49 (2013) (c) 2013-2013
40
A. Gjurchinovski, V. Urumov
5
Figure 1 shows the results of using Eq. (6) for the numerical calculations of
the control domains in the parametric plane spanned by the feedback gain K and
the nominal delay T0 . The delay modulation is in the form of a square wave. The
parameters of the unstable focus are λ = 0.1 and ω = π. The memory parameter is
fixed at R = 0.7. Panel (a) depicts the control domain in the absence of modulation,
which consists of several stability islands centred around the values of T0 equal to
(2n + 1)π/ω, n = 0, 1, 2 . . . . A detailed description of the stability domains when the
delay is constant is provided in Ref. [7]. It is seen that as the modulation amplitude ε
is increased from zero (panels b–d), the domain area is enlarged up to a certain value
of ε, after which the area shrinks, reconfiguring itself in several distinct stability
islands encompassing the values of T0 equal to 2nπ/ω. With further increase of ε,
the position of the stability islands is changing in an oscillatory manner between odd
and even multiples of π/ω. We note that in the case of sawtooth or sine wave (f3 (t) =
sin t) modulations, the dependence of the enlargement of the control domains on the
amplitude ε is monotonic.
To improve the performance of stabilization of unstable fixed points in the
laser systems, Ahlborn and Parlitz suggested a control procedure using multiple delay feedback signals containing incommensurate delays [1, 2]. In the case of two
Pyragas-type feedback terms, the multiple delay control force that includes variable
delays becomes:
F(t) = K1 [x(t − τ1 (t)) − x(t)] + K2 [x(t − τ2 (t)) − x(t)],
(7)
where τ1 (t) and τ2 (t) in general case can be written as:
τ1 (t) = T1 + ε1 f1 (ν1 t),
(8)
τ2 (t) = T2 + ε2 f2 (ν2 t).
(9)
By T1 and T2 we denote the nominal delays, ε1 < T1 and ε2 < T2 are the corresponding modulation amplitudes, ν1 and ν2 are the frequencies of the modulations,
and f1 and f2 are the modulation functions. When ε1 = ε2 = 0, the general multiple variable-delay scheme is reduced to the multiple delay feedback control with
constant delays [1, 2].
We will use the controller (7) to stabilize the unstable fixed point of a focus
type. The controlled system in centre manifold coordinates is given by
λ ω
ẋ(t) =
x(t)
−ω λ
(10)
+K1 [x(t − τ1 (t)) − x(t)] + K2 [x(t − τ2 (t)) − x(t)].
As before, the parameters of the unstable focus are λ = 0.1 and ω = π. When the
modulation frequencies of the delays are high, the stability of the controlled focus is
RJP 58(Nos. 1-2), 36–49 (2013) (c) 2013-2013
6
Stabilization of unstable steady states and unstable periodic orbits
6
41
0.0
6
HaL
5
5
4
4
K3
3
2
2
1
1
0
HbL
-0.3
-0.6
-0.9
0
0
1
2
3
4
5
6
6
1
2
3
4
5
5
5
4
4
K3
3
2
2
1
1
HdL
-0.3
-0.6
-0.9
0
0
1
2
3
4
5
6
-1.2
0.0
6
HcL
6
1
T0
2
3
4
5
6
-1.2
T0
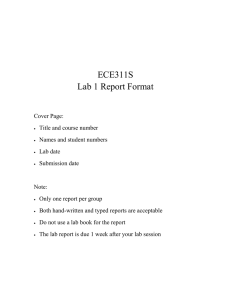
Fig. 1 – Control domains in the parametric plane (K, T0 ) of the extended time-delayed autosynchronization method with a variable time delay for stabilization of an unstable fixed point of a focus type.
The delay modulation is in the form of a square wave with amplitude: (a) ε = 0; (b) ε = 0.25; (c)
ε = 0.5; (d) ε = 1. The memory parameter is R = 0.7. The parameters of the unstable focus are
λ = 0.1 and ω = π. The grey tones of the shading indicate the magnitude of the largest eigenvalue Λ of
the corresponding characteristic equation. A shift along the T0 -axis is introduced due to the restriction
T0 > ε.
RJP 58(Nos. 1-2), 36–49 (2013) (c) 2013-2013
42
T2
A. Gjurchinovski, V. Urumov
12
12
10
10
8
8
6
6
4
4
2
2
7
0.0
-0.3
-0.6
-0.9
HaL
HbL
0
0
2
4
6
8
10
2
12
4
6
8
10
12
-1.2
12
12
10
10
8
8
6
6
-0.6
4
4
-0.9
0.0
-0.3
T2
2
HcL
2
4
6
8
10
2
12
T1
HdL
2
4
6
8
10
12
-1.2
T1
Fig. 2 – The domains of control in the parametric plane (T1 , T2 ) for the multiple delay feedback method
with variable delays depicting successful stabilization of the unstable fixed point of a focus type. The
value of the feedback gain parameter is the same for both signals and it equals K = 0.2. The delay
modulations are in the form of a sawtooth wave with equal amplitudes: (a) ε = 0; (b) ε = 0.25; (c)
ε = 0.5; (d) ε = 1. The parameters of the unstable focus are λ = 0.1 and ω = π. The grey tones of the
shading indicate the magnitude of the largest eigenvalue Λ of the corresponding characteristic equation.
Both T1,2 -axes are shifted for the same amount due to the restriction T1,2 > ε.
RJP 58(Nos. 1-2), 36–49 (2013) (c) 2013-2013
8
Stabilization of unstable steady states and unstable periodic orbits
43
determined by the roots Λi of the characteristic equation
Λ − λ ∓ iω + K1 1 − e−ΛT1 g1 (Λε1 )
+ K2 1 − e−ΛT2 g2 (Λε2 ) = 0, (11)
where the complex functions gi are defined by
Z 1
gi (Λεi ) =
wi (η)eΛεi η dη,
−1
(12)
and they depend on the type of the modulation function fi (t). The results of the numerical analysis of the characteristic Eq. (11) are shown in Fig. 2. In the calculations,
we have considered the case when the delay modulations in both feedback terms are
in the form of a sawtooth wave with equal amplitudes ε1 = ε2 = ε and equal feedback
gains K1 = K2 = 0.2. The stability domains are depicted in the parametric plane of
the two nominal delays T1 and T2 . The shaded regions correspond to the values of
the control parameters for which the control of the unstable focus is successful. It
is observed that the control domains are symmetrical with respect to the diagonal
T1 = T2 . Panel (a) depicts the case when the modulation is absent, i.e. when ε = 0.
This diagram corresponds to the original control scheme by Ahlborn and Parlitz. It is
obvious from panels (b)–(d) that the increase of the modulation amplitude ε, leads to
a significant enlargement of the area of the domains with successful control. At the
same time one observes from the changes in the shadings that depending on the values of the nominal times T1 and T2 , the introduction of the feedback could increase
or decrease the largest eigenvalue of the characteristic equation (11).
3. STABILIZATION OF UNSTABLE PERIODIC ORBITS IN SYSTEMS DESCRIBED BY
ORDINARY DIFFERENTIAL EQUATIONS
In this section we consider the possibility to apply the variable-delay feedback
control to unstable periodic orbits in chaotic systems described by ordinary differential equations. The main problem in this case is the choice of the delay modulation
τ (t) in order for the control method to remain non-invasive.
In the simulations of the control process, we will consider the chaotic Rössler
system [37] defined by the equations
ẋ(t) = −y(t) − z(t),
ẏ(t) = x(t) + 0.2 y(t) + F (t),
(13)
ż(t) = 0.2 + z(t) [x(t) − 5.7] ,
where F (t) is the feedback control force applied through the y-channel, having a
general form
F (t) = κ(t) [y(t − τ (t)) − y(t)].
(14)
RJP 58(Nos. 1-2), 36–49 (2013) (c) 2013-2013
44
A. Gjurchinovski, V. Urumov
9
With κ(t) we denote the feedback gain, which in the general case could be timedependent, and τ (t) is the variable time-delay. In the case when the control parameters κ(t) and τ (t) are constant, the control method is reduced to the original Pyragas
control scheme. A detailed bifurcation analysis of the chaotic Rössler system described by ordinary differential equations and subjected to a time-delayed feedback
control has been performed by Balanov, Janson and Schöll [3], revealing multistability and a large variety of different attractors that are not present in the free-running
system. The inclusion of a variable feedback gain in Eq. (14) is inspired by the work
of Schuster and Stemmler [8,39], in which they showed that a Pyragas controller with
an oscillating feedback gain can overcome the limitation of an analogous controller
with constant κ.
In the absence of control, the Rössler system is chaotic. The approximate values of the periods of its three shortest unstable orbits are T1 = 5.88, T2 = 11.75
and T3 = 17.5. In fig. 3 we show the results of the evaluation of the dispersion
< (y(t − τ ) − y(t))2 > as a function of the feedback gain parameter K. The dispersion is evaluated after some initial transition time and taking different initial conditions. One observes deep minima if the delay is close to the period of the unstable
orbit and if the gain is properly selected. To obtain more precise locations of the parameters involved, the above resonance curves have to be looked upon under greater
magnification. Panel (a) in Fig. 3 depicts the result of the above spectroscopic procedure to determine the stability interval of the feedback gain for the period-1 orbit
(τ = T1 ) under the Pyragas control. In this case, the control force is:
F (t) = K [y(t − τ ) − y(t)].
(15)
The control is successful for the values of K in the interval [0.12, 0.62].
A question arises whether it is possible to enlarge the control interval for K
by applying a variable time-delay τ (t), and what should be the choice of the timedependence τ (t) for a non-invasive control. One suitable choice of the delay function
τ (t) is given by
T,
nT < t < (n + 1)T ,
τ (t) =
(16)
2T,
(n + 1)T < t < (n + 2)T ,
where T is the period of the unstable orbit, and n = 0, 2, 4, . . . It can be noticed that
with this choice of τ (t), the delay function is periodic with a half-period equal to the
period of the unstable orbit. When the control is achieved, the control signal vanishes
and the control is non-invasive. The choice for the half-period of the delay modulation to match the period of the unstable orbit is not accidental. The simulations show
that for such a choice, the control interval for the gain K is largest, meaning that
there is a resonance between the modulation period and the period of the unstable
orbit.
RJP 58(Nos. 1-2), 36–49 (2013) (c) 2013-2013
10
Stabilization of unstable steady states and unstable periodic orbits
45
Panel (b) in Fig. 3 shows the results of the calculations for the favourable
feedback gain control interval when the delay modulation is given by (16). The
control force is in the form:
F (t) = K [y(t − τ (t)) − y(t)].
(17)
In this case, the feedback gain interval leading to successful control is K ∈ [0.25, 1.15],
and it is almost twice as large as the one in the Pyragas control.
It is interesting to explore the influence of the periodic modulation of the feedback gain at constant time delay. By choosing the gain function κ(t) as:
K,
nT < t < (n + 1)T ,
κ(t) =
(18)
K/2,
(n + 1)T < t < (n + 2)T ,
and a constant τ to match the period of the unstable orbit (τ = T1 ), we model an
oscillatory feedback gain control in the sense of Schuster and Stemmler
F (t) = κ(t) [y(t − τ ) − y(t)].
(19)
The calculations of the feedback gain intervals corresponding to successful stabilization of the unstable period-1 orbit in the chaotic Rössler system are shown in panel
(c) of Fig. 3. One observes two distinct control intervals for K for which the control
of the unstable period-1 orbit is successful, i.e. K ∈ [0.2, 0.45] ∪ [0.6, 0.85].
If in parallel to the modulation of the feedback gain, the delay is also modulated, the feedback control force obtains the general form (14). If we choose τ (t) and
κ(t) as (16) and (18) respectively, then the calculations of the control domain for the
period-1 orbit are shown in panel (d) of Fig. 3. It is seen that the length of the control
interval for K exceeds by far the corresponding control intervals discussed before,
and, in this case, it is K ∈ [0.25, 1.45]. A similar numerical analysis for the unstable
period-2 and period-3 orbits leads to the same conclusion that the control intervals in
the case of simultaneous modulation of the feedback gain κ and the delay time τ is
most efficient.
As already mentioned before, by choosing the half-period of the delay modulation to coincide with the period of the unstable orbit one achieves maximum control
interval for the feedback gain. This resonance effect is illustrated in Fig. 4.
4. CONCLUSIONS
The main effect obtained by the introduction of variable delay is in the enlargement of the domain of control parameters for which one can achieve stabilization
of unstable steady states or unstable periodic orbits with the benefit that the need
for fine-tuning of controlling parameters is reduced, without compromising the noninvasiveness of the method. This is in agreement with our previous studies related
RJP 58(Nos. 1-2), 36–49 (2013) (c) 2013-2013
<F 2>
46
A. Gjurchinovski, V. Urumov
10
1
0.1
0.01
0.001
10-4
HaL
<F 2>
0.0
10
1
0.1
0.01
0.001
10-4
<F 2>
<F 2>
0.4
0.6
0.8
1.0
1.2
1.4
0.2
0.4
0.6
0.8
1.0
1.2
1.4
0.2
0.4
0.6
0.8
1.0
1.2
1.4
0.2
0.4
0.6
0.8
1.0
1.2
1.4
HcL
0.0
10
1
0.1
0.01
0.001
10-4
0.2
HbL
0.0
10
1
0.1
0.01
0.001
10-4
11
HdL
0.0
K
Fig. 3 – The dependence of the dispersion of the control signal F (t) = y(t − τ ) − y(t) on the feedback
gain parameter K for the unstable period-1 orbit (τ = T1 = 5.88) in the chaotic Rössler system (13).
The deep minimum in the curves indicates finite segments for the gain parameter K that could achieve
stabilization of the period-1 orbit. Different panels correspond to different types of control: (a) Pyragas
delayed feedback control; (b) Variable-delay feedback control; (c) Control with oscillating feedback
gain κ(t) (the method of Schuster and Stemmler); (d) Control with variable κ(t) and τ (t) (oscillating
feedback gain + variable-delay feedback control). The time-dependence of κ and τ is given with (16)
and (18). The combination of the oscillating feedback gain and variable-delay feedback control results
in a maximum control domain.
RJP 58(Nos. 1-2), 36–49 (2013) (c) 2013-2013
<F 2>
12
Stabilization of unstable steady states and unstable periodic orbits
10
1
0.1
0.01
0.001
10-4
HaL
<F 2>
0.0
10
1
0.1
0.01
0.001
10-4
<F 2>
0.2
0.4
0.6
0.8
1.0
1.2
1.4
0.2
0.4
0.6
0.8
1.0
1.2
1.4
0.2
0.4
0.6
0.8
1.0
1.2
1.4
HbL
0.0
10
1
0.1
0.01
0.001
10-4
47
HcL
0.0
K
Fig. 4 – The resulting control intervals for K from the spectroscopic procedure for the period-1 orbit
(T1 = 5.88) in the chaotic Rössler system (13) subjected to variable-delay feedback control. The
variation of the delay τ is given by Eq. (16). Different panels correspond to different periods of the
delay modulation: (a) The half-period of the delay modulation coincides with the period of the unstable
period-1 orbit. (b) The half-period of the delay modulation is twice the period of the unstable period-1
orbit. (c) The period of the delay modulation equals the period of the unstable period-1 orbit. The
maximum control interval is achieved when the half-period of the delay modulation coincides with the
period of the unstable orbit (panel a).
RJP 58(Nos. 1-2), 36–49 (2013) (c) 2013-2013
48
A. Gjurchinovski, V. Urumov
13
to retarded differential equations [14] and fractional differential equations [15]. This
property remains true even in the case of large number of nonlinear oscillators coupled through their mean field [16]. Variable delay does not overcome the odd-number
limitation which restricts the applicability of the Pyragas method to the stabilization
of unstable steady states only to the case when the number of their positive eigenvalues is not odd [19, 25, 26]. It would be interesting to examine whether similar
effects could be found following the idea of introduction of additional unstable variable in the original system to overcome the mentioned limitation [35,36]. Additional
studies with various extensions of the method by taking different delay and feedback
gain functions in order to obtain optimal control parameters could be useful. Finally,
an experimental verification of the advantages of the feedback with variable delay
might be possible by using numerical approach and variable frequency of sampling
data from the evolution of the system, which will be subsequently used to construct
the feedback term in the Pyragas form.
REFERENCES
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
23.
A. Ahlborn and U. Parlitz, Phys. Rev. Lett. 93, 264101 (2004).
A. Ahlborn and U. Parlitz, Phys. Rev. E 72, 016206 (2005).
A. G. Balanov, N. B. Janson and E. Schöll, Phys. Rev. E 71, 016222 (2005).
J. Bechhoefer, Rev. Mod. Phys. 77, 783 (2005).
S. Bielawski, D. Derozier, and P. Glorieux, Phys. Rev. E 49, R971 (1994).
S. Boccaletti, C. Grebogi, Y. C. Lai, H. Mancini and D. Maza, Phys. Rep. 329, 103 (2000).
T. Dahms, P. Hövel and E. Schöll, Phys. Rev. E 76, 056201 (2007).
A. Fichtner, W. Just, G. Radons, J. Phys A: Math. Gen. 37, 3385 (2004).
B. Fiedler, V. Flunkert, M. Georgi, P. Hövel and E. Schöll, Phys. Rev. Lett 98, 114101 (2007).
B. Fiedler, S. Yanchuk, V. Flunkert, P. Hövel, H.-J. Wünsche, and E. Schöll, Phys. Rev. E 77,
066207 (2008).
T. Fukuyama, H. Shirahama, and Y. Kawai, Phys. Plasmas 9, 4525 (2002).
A. Gjurchinovski and V. Urumov, God. Zb. Inst. Mat. 41, 57 (2008).
A. Gjurchinovski and V. Urumov, Europhys. Lett. 84, 40013 (2008).
A. Gjurchinovski and V. Urumov, Phys. Rev. E 81, 016209 (2010).
A. Gjurchinovski, T. Sandev and V. Urumov, J. Phys. A: Math. Theor. 43, 445102 (2010).
A. Gjurchinovski, V. Urumov and Z. Vasilkoski, to be published.
K. Hall, D. J. Christini, M. Tremblay, J. J. Collins, L. Glass, and J. Billette, Phys. Rev. Lett. 78,
4518 (1997).
P. Hövel and E. Schöll, Phys. Rev. E 72, 046203 (2005).
W. Just, T. Bernard, M. Ostheimer, E. Reibold and H. Benner, Phys. Rev. Lett. 78, 203 (1997).
W. Just, B. Fiedler, M. Georgi, V. Flunkert, P. Hövel and E. Schöll, Phys. Rev. E 76, 026210
(2007).
T. Kapitaniak (ed.), Controlling Chaos (Academic Press, London, 1996).
J. M. Krodkiewski and J. S. Faragher, J. Sound Vib. 234, 591 (2000).
C. von Loewenich, H. Benner, and W. Just, Phys. Rev. Lett. 93, 174101 (2004).
RJP 58(Nos. 1-2), 36–49 (2013) (c) 2013-2013
14
Stabilization of unstable steady states and unstable periodic orbits
24.
25.
26.
27.
28.
29.
30.
31.
32.
33.
34.
35.
36.
37.
38.
39.
40.
49
W. Michiels, V. Van Assche and S. Niculescu, IEEE Trans. Autom. Control 50, 493 (2005).
H. Nakajima, Phys. Lett. A 232, 207 (1997).
H. Nakajima and Y. Ueda, Physica D 111, 143 (1998).
T. Pierre, G. Bonhomme, and A. Atipo, Phys. Rev. Lett. 76, 2290 (1996).
O. V. Popovych, C. Hauptmann, and P. A. Tass, Phys. Rev. Lett. 94, 164102 (2005).
C. M. Postlethwaite and M. Silber, Phys. Rev. E 76, 056214 (2007).
K. Pyragas, Phys. Lett. A 170, 421 (1992).
K. Pyragas, Phil. Trans. R. Soc. A 364, 2309 (2006).
K. Pyragas and A. Tamaševičius, Phys. Lett. A 180, 99 (1993).
K. Pyragas, Phys. Lett. A 206, 323 (1995).
K. Pyragas, Phys. Rev. Lett. 86, 2265 (2001).
K. Pyragas, V. Pyragas, I. Z. Kiss and J. L. Hudson, Phys. Rev. Lett. 89, 244103 (2002).
K. Pyragas, V. Pyragas, I. Z. Kiss and J. L. Hudson, Phys. Rev. E 70, 026215 (2004).
O. E. Rössler, Phys. Lett. A 57, 397 (1976).
M. G. Rosenblum and A. S. Pikovsky, Phys. Rev. Lett. 92, 114102 (2004).
H. G. Schuster and M. B. Stemmler, Phys. Rev. E 56, 6410 (1997).
E. Schöll and H. G. Schuster (ed.), Handbook of chaos control (Wiley-VCH, Weinheim, 2008),
2nd edition.
41. J. E. S. Socolar, D. W. Sukow and D. J. Gauthier, Phys. Rev E 50, 3245 (1994)
42. D. W. Sukow, M. E. Bleich, D. J. Gauthier, and J. E. S. Socolar, Chaos 7, 560 (1997).
43. S. Yanchuk, M. Wolfrum, P. Hövel and E. Schöll, Phys. Rev. E 74, 026201 (2006).
RJP 58(Nos. 1-2), 36–49 (2013) (c) 2013-2013