Electrical Measurements Absolute Measuring Instruments
advertisement

Electrical Measurements
Basically there are three types of measuring instruments and they are
(a) Electrical measuring instruments
(b) Mechanical measuring instruments.
(c) Electronic measuring instruments.
Here we are interested in electrical measuring instruments so we will discuss about them in
detail. Electrical instruments measure the various electrical quantities like electrical power
factor, power, voltage and electric current etc. All analog electrical instruments use mechanical
system for the measurement of various electrical quantities but as we know the all mechanical
system has some inertia therefore electrical instruments have a limited time response.
Now there are various ways of classifying the instruments. On broad scale we can categorize
them as:
Absolute Measuring Instruments
These instruments give output in terms of physical constant of the instruments. For example
Rayleigh’s electric current balance and Tangent galvanometer are absolute instruments.
Secondary Measuring Instruments
These instruments are constructed with the help of absolute instruments. Secondary instruments
are calibrated by comparison with an absolute instruments. These are more frequently used in
measurement of the quantities as compared to absolute instruments, as working with absolute
instruments is time consuming.
Another way of classifying the electrical measuring instruments depends on the way they
produce the result of measurements. On this basis they can be of two types:
Deflection Type Instruments
In these types of instruments, pointer of the electrical measuring instrument deflects to measure
the quantity. The value of the quantity can be measured by measuring the net deflection of the
pointer from its initial position. In order to understand these types of instruments let us take an
example of deflection type permanent magnet moving coil ammeter which is shown below:
1
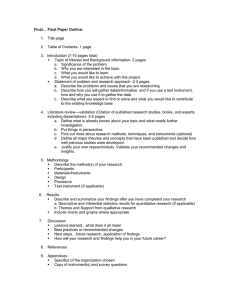
Deflection type Permanent Magnet Moving Coil Ammeter
The diagram shown above has two permanent magnets which are called the stationary part of the
instrument and the moving part which is between the two permanent magnets that consists of
pointer. The deflection of the moving coil is directly proportion to the current. Thus the torque is
proportional to the electric current which is given by the expression Td = K.I, where Td is the
deflecting torque. K is proportionality constant which depends upon the strength of the magnetic
field and the number of turns in the coil. The pointer deflects between the two opposite forces
produced by the spring and the magnets. And the resulting direction of the pointer is in the
direction of the resultant force. The value of electric current is measured by the deflection angle
θ, and the value of K.
Null Type Instruments
In opposite to deflection type of instruments, the null or zero type electrical measuring
instruments tend to maintain the position of pointer stationary. They maintain the position of the
pointer stationary by producing opposing effect. Thus for the operation of null type instruments
following steps are required:
(1) Value of opposite effect should be known in order to calculate the value of unknown
quantity.
(2) Detector shows accurately the balance and the unbalance condition accurately.
The detector should also have the means for restoring force.
Let us look at the advantages and disadvantages of deflection and null type of measuring
instruments:
2
(1) Deflection type of instruments is less accurate than the null type of instruments. It is because,
in the null deflecting instruments the opposing effect is calibrated with the high degree of
accuracy while the calibration of the deflection type instruments depends on the value of
instrument constant hence usually not having high degree of accuracy.
(2) Null point type instruments are more sensitive than the Deflection type instruments.
(3) Deflection type instruments are more suitable under dynamic conditions than null type of
instruments as the intrinsic responses of the null type instruments are slower than deflection type
instruments.
Following are the important three functions of the electrical measuring instruments.
Indicating Function
These instruments provide information regarding the variable quantity under measurement and
most of the time this information are provided by the deflection of the pointer. This kind of
function is known as the indicating function of the instruments.
Recording Function
These instruments usually use the paper in order to record the output. This type of function is
known as the recording function of the instruments.
Controlling Function
This is function is widely used in industrial world. In this these instruments controls the
processes.
Now there are two characteristics of electrical measuring instruments and measurement systems.
They are written below:
Static Characteristics
In these type of characteristics measurement of quantities are either constant or vary slowly with
the time. Few main static characteristics are written below:
(1) Accuracy: It is desirable quality in measurement. It is defined as the degree of the closeness
with which instrument reading approaches the true value of the quantity being measured.
Accuracy can be expressed in three ways (a) Point accuracy (b) Accuracy as the percentage of
scale of range. (c) Accuracy as percentage of true value.
(2) Sensitivity: It is also desirable quality in the measurement. It is defined as the ratio of the
magnitude response of the output signal to the magnitude response of the input signal.
(3) Reproducibility: It is again a desirable quality. It is defined as the degree of the closeness
with which a given quantity may be repeatedly measured. High value of reproducibility means
low value of drift. Drift are of three types (a) Zero drift (b) Span drift (c) Zonal drift.
3
Dynamic Characteristics
These characteristics are related with the rapidly changing quantities therefore in order to
understand these types of characteristics we are required to study the dynamic relations between
the input and the output.
ERRORS IN MEASUREMENT
In order to understand the concept of errors in measurement, we should know the two terms
that defines the error and these two terms are written below:
True Value
It is not possible to determine the true of quantity by experiment means. True value may be
defined as the average value of an infinite number of measured values when average deviation
due to various contributing factor will approach to zero.
Measured Value
It may be defined as the approximated value of true value. It can be found out by taking means of
several measured readings during an experiment, by applying suitable approximations on
physical conditions.
Now we are in a position to define static error. Static error is defined as the difference of the
measured value and the true value of the quantity. Mathematically we can write an expression of
error as, dA = Am - At where dA is the static error Am is measured value and At is true value.
It may be noted that the absolute value of error cannot be determined as due to the fact that the
true value of quantity cannot be determined accurately.
Let us consider few terms related to errors.
Limiting Errors or Guarantee Errors
The concept of guarantee errors can better clear if we study this kind of error by considering one
example. Suppose there is a manufacturer who manufacture an ammeter, now he should
promises that the error in the ammeter he is selling not greater the limit he sets. This limit of
error is known as limiting errors or guarantee error.
Relative Error or Fractional Error
It is defined as the ratio of the error and the specified magnitude of the quantity. Mathematically
we write as,
Where dA is the error and A is the magnitude.
4
Now here we are interested in computing resultant limiting error under the following cases:
(a) By taking the sum of two quantities: Let us consider two measured quantities a1 and a2. The
sum of these two quantities can be represented by A. Thus we can write A = a1 + a2. Now the
relative incremental value of this function can be calculated as
Separating the each term as shown below and by multiplying and dividing a1 with the first term
and a2 with the second term we have
From the above equation we can see that the resultant limiting error is equal to the sum of
products formed by multiplying the individual relative limiting errors by the ratio of each term to
the function. Same procedure can be applied to calculate the resultant limiting error due to
summation of more than two quantities. In order to calculate the resultant limiting error due to
difference of the two quantities just change the addition sign with subtraction and rest procedure
is same.
(b) By taking the product of two quantities: Let us consider two quantities a1 and a2. In this case
the product of the two quantities are expressed as A = a1.a2. Now taking log both sides and
differentiating with respect to A we have resultant limiting errors as
From this equation we can see that the resultant error is summation of relative errors in
measurement of terms. Similarly we can calculate the resultant limiting error for power of
factor. Hence the relative error would be n times in this case.
Types of Errors
Basically there are three types of errors on the basis; they may arise from the source.
Gross Errors
This category of errors includes all the human mistakes while reading, recording and the
readings. Mistakes in calculating the errors also come under this category. For example while
taking the reading from the meter of the instrument he may read 21 as 31. All these types of error
are come under this category. Gross errors can be avoided by using two suitable measures and
they are written below:
5
(i) A proper care should be taken in reading, recording the data. Also calculation of error should
be done accurately.
(ii) By increasing the number of experimenters we can reduce the gross errors.
If each experimenter takes different reading at different points, then by taking average of more
readings we can reduce the gross errors.
Systematic Errors
In order to understand these kinds of errors, let us categorize the systematic errors as
(i) Instrumental Errors
These errors may be due to wrong construction, calibration of the measuring instruments. These
types of error may be arises due to friction or may be due to hysteresis. These types of errors also
include the loading effect and misuse of the instruments. Misuse of the instruments results in the
failure to the adjust the zero of instruments. In order to minimize the gross errors in measurement
various correction factors must be applied and in extreme condition instrument must be recalibrated carefully.
(ii) Environmental Errors
This type of error arises due to conditions external to instrument. External condition includes
temperature, pressure, humidity or it may include external magnetic field. Following are the
steps that one must follow in order to minimize the environmental errors:
(A)Try to maintain the temperature and humidity of the laboratory constant by making some
arrangements.
(B)Ensure that there should not be any external magnetic or electrostatic field around the
instrument.
Observational Errors
As the name suggests these types of errors are due wrong observations. The wrong observations
may be due to PARALLAX. In order to minimize the PARALLAX error highly accurate meters
are required, provided with mirrored scales.
Random Errors
After calculating all systematic errors, it is found that there are still some errors in measurement
are left. These errors are known as random errors. Some of the reasons of the appearance of these
errors are known but still some reasons are unknown. Hence we cannot fully eliminate these
kinds of error.
6
PERMANENT MAGNET MOVING COIL INSTRUMENT
The permanent magnet moving coil instrument or PMMC type instrument uses two
permanent magnets in order to create stationary magnetic field. These types of instruments are
only used for measuring the dc quantities as if we apply ac electric current to these type of
instruments the direction of electric current will be reversed during negative half cycle and hence
the direction of torque will also be reversed which gives average value of torque zero. The
pointer will not deflect due to high frequency from its mean position showing zero reading.
However it can measure the direct electric current very accurately.
Let us move towards the constructions of permanent magnet moving coil instruments. We
will see the construction of these types of instruments in five parts and they are described below:
(a) Stationary part or magnet system: In the present time we use magnets of high field
intensities, high coercive force instead of using U shaped permanent magnet having soft iron
pole pieces. The magnets which we are using nowadays are made up of materials like alcomax
and alnico which provide high field strength.
(b) Moving coil: The moving coil can freely moves between the two permanent magnets as
shown in the figure given below. The coil is wound with many turns of copper wire and is placed
on rectangular aluminium which is pivoted on jeweled bearings.
7
(c) Control system: The spring generally acts as control system for PMMC instruments. The
spring also serves another important function by providing the path to lead electric current in and
out of the coil.
(d) Damping system: The damping force hence torque is provided by movement of aluminium
former in the magnetic field created by the permanent magnets.
(e) Meter: Meter of these instruments consists of light weight pointer to have free movement
and scale which is linear or uniform and varies with angle.
Let us derive a general expression for torque in permanent magnet moving coil instruments or
PMMC instruments. We know that in moving coil instruments the deflecting torque is given by
the expression:
Td = NBldI where N is number of turns,
B is magnetic flux density in air gap,
l is the length of moving coil,
d is the width of the moving coil,
And I is the electric current.
Now for a moving coil instruments deflecting torque should be proportional to current,
mathematically we can write Td = GI. Thus on comparing we say G = NBIdl. At steady state we
have both the controlling and deflecting torques are equal. Tc is controlling torque, on equating
controlling torque with deflection torque we have GI = K.x where x is deflection thus electric
current is given by
Since the deflection is directly proportional to the electric current therefore we need a uniform
scale on the meter for measurement of current.
Now we are going to discuss about the basic circuit diagram of the ammeter. Let us consider a
circuit as shown below:
8
Basic Ammeter Circuit
The electric current I is shown which breaks into two components at the point A. The two
components are Is and Im. Before I comment on the magnitude values of these currents, let us
know more about the construction of shunt resistance. The basic properties of shunt resistance
are written below,
The electrical resistance of these shunts should not differ at higher temperature, it they should
posses very low value of temperature coefficient. Also the resistance should be time
independent. Last and the most important property they should posses is that they should be able
to carry high value of electric current without much rise in temperature. Usually manganin is
used for making dc resistance. Thus we can say that the value of Is much greater than the value
of Im as resistance of shunt is low. From the we have,
Where Rs is resistance of shunt and Rm is the electrical resistance of the coil.
From the above two equations we can write,
Where m is the magnifying power of the shunt.
Errors in Permanent Magnet Moving Coil Instruments
There are three main types of errors:
(a) Errors due to permanent magnets: Due to temperature effects and aging of the magnets the
9
magnet may lose their magnetism to some extent. The magnets are generally aged by the heat
and vibration treatment.
(b) Error may appear in PMMC Instrument due to the aging of the spring. However the error
caused by the aging of the spring and the errors caused due to permanent magnet are opposite to
each other, hence both the errors are compensated with each other.
(c) Change in the resistance of the moving coil with the temperature: Generally the temperature
coefficients of the value of coefficient of copper wire in moving coil is 0.04 per degree celsius
rise in temperature. Due to lower value of temperature coefficient the temperature rises at faster
rate and hence the resistance increases. Due to this significant amount of error is caused.
Advantages of Permanent Magnet Moving Coil Instruments
(1)The scale is uniformly divided as the electric current is directly proportional to deflection of
the pointer. Hence it is very easy to measure quantities from these instruments.
(2)Power consumption is also very low in these types of instruments.
(3)Higher value of torque is to weight ratio.
(4)These are having multiple advantages, a single instrument can be used for measuring various
quantities by using different values of shunts and multipliers.
Instead of various advantages the permanent magnet moving coil instruments or PMMC
Instrument posses few disadvantages.
Disadvantages of Permanent Magnet Moving Coil Instruments
(1) These instruments cannot measure ac quantities.
(2) Cost of these instruments is high as compared to moving iron instruments.
MOVING IRON INSTRUMENT
This instrument is one of the most primitive forms of measuring and relay instrument. Moving
iron type instruments are of mainly two types. Attraction type and repulsion type instrument.
Whenever a piece of iron is placed nearer to a magnet it would be attracted by the magnet. The
force of this attraction depends upon the strength said magnetic field. If the magnet is
electromagnet is electromagnet then the magnetic field strength can easily be increased or
decreased by increasing or decreasing electric current through its coil. Accordingly the attraction
force acting on the piece of iron would also be increased and decreased. Depending upon this
simple phenomenon attraction type moving iron instrument was developed.
10
Whenever two pieces of iron are kept side by side and a magnet is brought nearer to them the
iron pieces will repulse each other. This repulsion force is due to same magnetic poles induced in
same sides the iron pieces due external magnetic field. This repulsion force increases if field
strength of the magnet is increased. Like case if the magnet is electromagnet, then magnetic field
strength can easily be controlled by controlling input electric current to the magnet. Hence if the
electric current increases the repulsion force between the pieces of iron is increased and it the
electric current decreases the repulsion force between them is decreased. Depending upon this
phenomenon repulsion type moving iron instrument was constructed.
Construction of Moving Iron Instrument
Attraction type moving iron instrument
The basic construction of attraction type moving iron instrument is illustrated bellow
A thin disc of soft iron is eccentrically pivoted in front of a coil. This iron tends to move inward
that is from weaker magnetic field to stronger magnetic field when electric current flowing
through the coil. In attraction moving instrument gravity control was used previously but now
gravity control method is replaced by spring control in relatively modern instrument. By
adjusting balance weight null deflection of the pointer is achieved. The required damping force is
provided in this instrument by air friction. The figure shows a typical type of damping system
provided in the instrument, where damping is achieved by a moving piston in an air syringe.
Theory of Attraction Type Moving Iron Instrument
Suppose when there is no electric current through the coil, the pointer is at zero, the angle made
by the axis of the iron disc with the line perpendicular to the field is φ. Now due electric current I
and corresponding magnetic field strength, the iron piece is deflected to an angle θ. Now
component of H in the direction of defected iron disc axis is Hcos{90 - (θ + φ) or Hsin(θ + φ).
Now force F acting on the disc inward to the coil is thus proportional to H2sin(θ + φ) hence the
force is also proportional to I2sin(θ + φ) for constant permeability. If this force is acting on the
disc at a distance l from the pivot, then deflection torque,
11
Working of Moving Iron Instrument
Since l is constant.
Where k is constant.
Now, as the instrument is gravity controlled, controlling torque will be
Where k' is constant.
At steady state condition,
12
Where K is constant.
ELECTROSTATIC TYPE INSTRUMENTS
Working Principle of Electrostatic Type Instruments
As the name suggests the electrostatic type instrument use static electrical field to produce the
deflecting torque. These types of instrument are generally used for the measurement of high
voltages but in some cases they can be used in measuring the lower voltages and powers of a
given circuit. Now there are two possible ways in which the electrostatic force can act. The two
possible conditions are written below,
Construction of Electrostatic Type Instruments
(a) When one of the plates is fixed and other plate is free to move, plates are oppositely charged
in order to have attractive force between them. Now due this attractive force movable plate will
move towards the stationary or fixed plate till the moving plate stored maximum electrostatic
energy.
(b) In other arrangement there may be force of attraction or repulsion or both, due to some rotary
of plate.
Force & Torque Equation of Electrostatic Type Instrument
Now let us derive force equation for the linear electrostatic type instruments. Let us consider two
plates as shown in the diagram given below.
13
Linear Electrostatic Instrument
Plate A is positively charged and plate B is negatively charged. As mentioned above as per the possible
condition (a) we have linear motion between the plates. The plate A is fixed and plate B is free to move.
Let us assume there exists some force F between the two plates at equilibrium when electrostatic force
becomes equal to spring force. At this point, the electrostatic energy stored in the plates is
Now suppose we increase the applied voltage by an amount dV, due to this the plate B moves towards the
plate A by a distance dx. The work done against the spring force due to displacement of the plate B be
F.dx. The applied voltage is related to electric current
From this value of electric current the input energy can be calculated as
as
From this we can calculate the change in the stored energy and that comes out to b
By neglecting the higher order terms that appears in the expression. Now applying the principle of energy
conservation we have input energy to the system = increase in the stored energy of the system +
mechanical
work
done
by
the
system.
From
this
we
can
write,
From
the
above
equation
the
force
can
be
calculated
as
Now let us derive force and torque equation for the rotary electrostatic type instruments. Diagram is
shown below,
14
Rotary Type Electrostatic Instruments
In order to find out the expression for deflecting torque in case of rotary type electrostatic instruments,
just replace the in the equation (1) F by Td and dx by dA. Now rewriting the modified equation we have
deflecting torque is equals to
. Now at steady state we have controlling torque is given
by the expression Tc = K*A. The deflection A can be written as
From this expression we conclude that the deflection of the pointer is directly proportional to the square
of the voltage to be measured hence the scale will be non uniform. Let us now discuss about Quadrant
electrometer. This instrument is generally used in measuring the voltage ranging from 100V to 20 kilo
volts. Again the deflecting torque obtained in the Quadrant electrometer is directly proportional to the
square of the applied voltage; one advantage of this is that this instrument can used to measure both the ac
and dc voltages. One advantage of using the electrostatic type instruments as voltmeters is that we can
extend the range of voltage to be measured. Now there are two ways of extending the range of this
instrument. We will discuss them one by one.
15
(a) By using resistance potential dividers: Given below is the circuit diagram of this type of
configuration.
The voltage which we want to measure is applied across the total resistance r and the
electrostatic capacitor is connected across the portion of the total resistance which is marked as r.
Now suppose the applied voltage is dc, then we should make one assumption that the capacitor
which is connected is having infinite leakage resistance. In this case the multiplying factor is
given by the ratio of electrical resistance r/R. The ac operation on this circuit can also be
analyzed easily again in case of ac operation we multiplying factor equal to r/R.
(b) By using capacitor multiplier technique: We can increase the range of voltage to be measured
by
placing
a
series
of
capacitors
as
shown
in
the
given
circuit.
Let us derive the expression for multiplying factor for the circuit diagram 1. Let us mark the
capacitance of the voltmeter be C1 and series capacitor be C2 as shown in the given circuit
diagram. Now the series combination of these capacitor be equal to
Which is the total capacitance of the circuit. Now the impedance of the voltmeter is equal to Z1 =
1/jωC1
and
thus
total
impedance
will
be
equal
to
Now the multiplying factor can be defined as the ratio of Z/Z1 which is equal to 1 + C2 / C1.
16
Similarly the multiplying factor can also be calculated. Hence by this way we can increase the
range of voltage to be measure.
Advantages of Electrostatic Type Instruments
Now let us look at some advantages of electrostatic type instruments.
(a) The first and the most important advantage is that we can measure both ac and dc voltage and
the reason is very obvious the deflecting torque is directly proportional to the square of the
voltage.
(b) Power consumption is quite low in these types of instruments as the electric current drawn by
these instruments is quite low.
(c) We can measure high value of voltage.
Disadvantages of Electrostatic Type Instruments
Instead of various advantages, electrostatic instruments posses few disadvantages and these are
written below.
(a) These are quite costly as compared to other instruments and also these have large size.
(b) The scale is not uniform.
(c) The various operating forces involved are small in magnitude.
ELECTRODYNAMOMETER TYPE WATTMETER
Before we study the internal construction of electrodynamometer wattmeter, it very essential
to know the principle of working of electrodynamometer type wattmeter. Dynamometer type
wattmeter works on very simple principle and this principle can be stated as "when any electric
current carrying conductor is placed inside a magnetic field, it experiences a mechanical force
and due this mechanical force deflection of conductor takes place".
Construction and Working Principle of Electrodynamometer Type Wattmeter
Now let us look at constructional details of electrodynamometer. It consists of following parts
There are two types of coils present in the electrodynamometer. They are :
(a) Moving coil : Moving coil moves the pointer with the help of spring control instrument. A
limited amount of electric current flows through the moving coil so as to avoid heating. So in
order to limit the electric current we have connect the high value resistor in series with the
moving coil. The moving is air cored and is mounted on a pivoted spindle and can moves freely.
In electrodynamometer type wattmeter, moving coil works as pressure coil. Hence moving
coil is connected across the voltage and thus the electric current flowing through this coil is
always proportional to the voltage.
17
(b) Fixed coil: The fixed coil is divided into two equal parts and these are connected in series
with the load, therefore the load electric current will flow through these coils. Now the reason is
very obvious of using two fixed coils instead of one, so that it can be constructed to carry
considerable amount of electric current. These coils are called the electric current coils of
electrodynamometer type wattmeter. Earlier these fixed coils are designed to carry the electric
current of about 100 amperes but now the modern wattmeter are designed to carry electric
current of about 20 amperes in order to save power.
(c) Control system: Out of two controlling systems i.e.
(1) Gravity control
(2) Spring control, only spring controlled systems are used in these types of wattmeter. Gravity
controlled system cannot be employed because they will appreciable amount of errors.
(d) Damping system: Air friction damping is used, as eddy electric current damping will distort
the weak operating magnetic field and thus it may leads to error.
(e) Scale: There is uniform scale is used in these types of instrument as moving coil moves
linearly over a range of 40 degrees to 50 degrees on either sides.
Now let us derive the expressions for the controlling torque and deflecting torques. In order to
derive these expressions let us consider the circuit diagram given below:
Electrodynamometer Type Wattmeter
18
We know that instantaneous torque in electro dynamic type instruments is directly proportional
to product of instantaneous values of currents flowing through both the coils and the rate of
change of flux linked with the circuit.
Let I1 and I2 be the instantaneous values of currents in pressure and electric current coils
respectively.
So
the
expression
for
the
torque
can
be
written
as:
where x is the angle. Now let the applied value of voltage across the pressure coil be
Assuming the electrical resistance of the pressure coil be very high hence we can neglect
reactance with respect to its resistance. In this the impedance is equal to its electrical resistance
therefore it is purely resistive. The expression for instantaneous electric current can be written as
I2
=
v
/
Rp
where
Rp
is
the
resistance
of
pressure
coil.
If there is phase difference between voltage and electric current, then expression for
instantaneous electric current through electric current coil can be written as
As electric current through the pressure coil in very very small compare to electric current
through electric current coil hence electric current through the electric current coil can be
considered as equal to total load current.
Hence
the
instantaneous
value
of
torque
can
be
written
as
Average value of deflecting torque can be obtained by integrating the instantaneous torque from
limit
0
to
T,
where
T
is
the
time
period
of
the
cycle.
Controlling torque is given by Tc = Kx where K is spring constant and x is final steady state value
of deflection.
Advantages of Electrodynamometer Type Wattmeter
Following are the advantages of electrodynamometer type wattmeters and they are written as
follows:
(a) Scale is uniform up to certain limit.
(b) They can be used for both to measure ac as well dc quantities as scale is calibrated for both.
Errors in Electrodynamometer Type Wattmeter
Following are the errors in the electrodynamometer type wattmeters:
(a) Errors in the pressure coil inductance.
19
(b) Errors may be due to pressure coil capacitance.
(c) Errors may be due to mutual inductance effects.
(d) Errors may be due connections.(i.e. pressure coil is connected after electric current coil)
(e) Error due to Eddy currents.
(f) Errors caused by vibration of moving system.
(g) Temperature error.
(h) Errors due to stray magnetic field.
POWER FACTOR METERS
Before we introduce various types of power factor meters it is very essential to understand what
are the needs of power factor meter? Why we do not directly calculate power factor in an a.c.
circuit just by dividing the power with product of electric current and voltage as these readings
can be easily obtained from wattmeter, ammeter and voltmeter. Obviously there various
limitations of using this method as it may not provide high accuracy, also chances of increment
of error is very high. Therefore this method is not adopted in industrial world. Measurement of
power factor accurately is very essential everywhere. In power transmission system and
distribution system we measure power factor at every station and electrical substation using these
power factor meters. Power factor measurement provides us the knowledge of type of loads
that we are using, helps in calculation of losses happening during the power transmission system
and distribution. Hence we need a separate device for calculating the power factor accurately and
more precisely. General construction of any power factor meter circuit include two coils pressure
coil and electric current coil. Pressure coil is connected across the circuit while electric current
coil is connected such it can carry circuit electric current or a definite fraction of current, by
measuring the phase difference between the voltage and electric current the electrical power
factor can be calculated on suitable calibrated scale. Usually the pressure coil is splits into two
parts namely inductive and non-inductive part or pure resistive part. There is no requirement of
controlling system because at equilibrium there exist two opposite forces which balance the
movement of pointer without any requirement of controlling force. Now there are two types of
power factor meters.
(1) Electrodynamometer type and
(2) Moving iron type.
Let us study electrodynamometer type first.
20
In electrodynamometer type power factor meter there are further two types on the basis of
supply voltage
(1) Single phase
(2) Three phase.
Now the pressure coil is spitted into two parts one is purely inductive another is purely resistive
as shown in the diagram by resistor and inductor. At present the reference plane is making an
angle A with coil 1. And the angle between both the coils 1 and 2 is 90°. Thus the coil 2 is
making an angle (90°+A) with the reference plane. Scale of the meter is properly calibrated
shown the value values of cosine of angle A. Let us mark the electrical resistance connected to
coil 1 be R and inductor connected to coil 2 be L. Now during measurement of power factor the
values of R and L are adjusted such that R=ωL so that both coils carry equal magnitude of
current. Therefore the electric current passing through the coil 2 is lags by 90° with reference to
electric current in coil 1 as coil 2 path is highly inductively in nature.
The general circuit diagram of single phase electrodynamometer power factor meter is given
below.
Single Phase Power Factor Meter
Let us derive an expression for deflecting torque for this power factor meter. Now there are two
deflecting torques one is acting on the coil 1 and another is acting on the coil 2. The coil winding
are arranged such that the two torques produced, are opposite to each other and therefore pointer
will take a position where the two torques are equal. Let us write a mathematical expression for
the deflecting torque for coil 1-
21
Where M is the maximum value of mutual inductance between the two coils,
B is the angular deflection of the plane of reference.
Now the mathematical expression for the deflecting torque for coil 2 is-
At equilibrium we have both the torque are equal thus on equating T1=T2 we have A=B. From
here we can see that the deflection angle is the measure of phase angle of the given circuit. The
phasor diagram is also shown for the circuit such that the electric current in the coil 1 is
approximately at an angle of 90° to electric current in the coil 2.
Given below are some of the advantages and disadvantages of use electro dynamic type power
factor meters.
Advantages of Electro dynamic Type Power Factor Meters
(1) Losses are less because of minimum use of iron parts and also give less error over a small
range of frequency as compared to moving iron type instruments.
(2) They high torque is to weight ratio.
Disadvantages of Electro dynamic Type Power Factor Meters
(1) Working forces are small as compared to moving iron type instruments.
(2) Scale is not extended over 360°.
(3) Calibration of electrodynamometer type instruments are highly affected by the changing the
supply voltage frequency.
(4) They are quite costly as compared to other instruments.
22