Multi-Channel Controller
advertisement

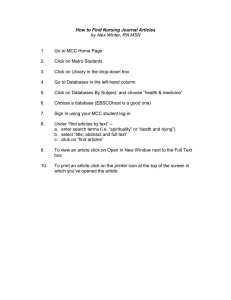
Multi-Channel Controller Purpose: • The multi-channel controller transports data between a multiplexed data stream and channel data buffers using a user defined format. For a complete understanding of this section, a good understanding of the serial interface is required. If you haven’t already done so, it is advisable to study that module first. Objectives: • There are a number of parameters and registers that are used by the MCC to control the operation. This module will explain the functionality of those features as well as how to configure them in multiple receive/transmit routing and control situations. Contents: • The basic fundamentals of the MCC followed by transmit and receive examples for parameters and registers. The module is concluded by an exercise. Learning Time: • There are 22 pages in this module with 16 reference pages, which will take approximately 41 minutes. The multi-channel controller transports data between a multiplexed data stream and channel data buffers using a user defined format. For a complete understanding of this section, a good understanding of the serial interface is required. If you haven’t already done so, it is advisable to study that module first. There are a number of parameters and registers that are used by the MCC to control the operation. This module will explain the functionality of those features as well as how to configure them in multiple receive/transmit routing and control situations. The contents of this module include the basic fundamentals of the MCC followed by transmit and receive examples for parameters and registers. The module is concluded by an exercise. There are 22 pages in this module with 16 reference pages, which will take approximately 41 minutes. 1 Multi-Channel Controller • Two identical multi-channel controllers support a maximum of 256 channels. • MCC1 connects through SI1 for channels 0 - 127 • MCC2 connects through SI2 for channels 128 - 255. There are two identical Multi-channel Controllers supporting a maximum of 256 channels. MCC1 connects through serial interface one for channels 0- 127. MCC2 connects through serial interface two for channels 128-255. 2 MCC Key Features • Supports up to 128 serial, full duplex channels • Can be divided into up to 4 subgroups of 32 fixed channels • Independent mapping for receive and transmit • Interrupt support per channel using circular queues • External buffer descriptor tables per channel • 64-bit data transactions for buffer descriptor access • HDLC or transparent protocol per channel • Supports super-channel synchronization • Supports in-line synchronization in transparent mode The multi-channel controllers each offer the following key features: Support up to 128 serial, full duplex channels. Can be divided into up to four subgroups of 32 fixed channels. Independent mapping for receive and transmit. Interrupt support per channel using circular queues. External buffer descriptor tables per channel. 64-bit data transactions for buffer descriptor access. HDLC or transparent protocol per channel. Supports super-channel synchronization. Supports in-line synchronization in transparent mode. 3 Connections MCCFn SIRAMn Channels 0 - 31 Channels Channels128 0 - -31 159 TDMna Channels 32 0 --31 63 Channels Channels160 0 - -31 191 Serial Data TDMnb TDMnc Channels 64 0 --31 95 Channels Channels192 0 - -31 223 TDMnd Channels Channels96 0 - 127 31 Channels Channels224 0 - -31 255 This diagram provides a basic indication of how a controller can be connected and the associated controls. The basic operation of the MCC is to take serially multiplexed data , collect it into bytes and route it to the required channel. On the left are indicated the four possible serial connections available to each MCC connected through the four time division multiplexers. Each one of four groups of channels can be connected to any TDM selected in the MCCF register and each connection is independently controlled, so there is a completely free choice. All the channels could be connected to one TDM or any combination. The channels are in fixed groups of 32. For MCC1, the groups are channels 0-31, 32-63, 64-95, and 96-127. MCC2 groups are 128-159, 160-191, 192-223, and 224-255. Channel routing and control is handled by the SIRAM, as shown in the serial interface module. The lower case n appended to the MCCF register and SIRAM indicates that there is one of each for each MCC. This also applies to the TDM’s and the a, b, c, d, appended to those indicates the four available for each MCC. 4 Example Operation Serial Interface SIRAM (channel Route) Data_p Data_q Data_r Data_s TDM Data_t Data_u Data_v Data_w Data_x Data_y Buffer Descriptors MCC Ch.69 Ch.74 Ch.69 Ch.74 Ch.81 Ch.90 Parameters Buffers Ch.81 Ch.90 Data in the time slot is directed to or from the appropriate channel buffer. This example is a simple demonstration of what the MCC does to help understand the basic principles. This example only covers the receive process but transmit is basically the same in reverse. At the top is a representation of the TDM with the data stream shown in groups of bytes. The TDM receives the serial data and groups it into bytes and the SIRAM associated with it defines the channel that each byte is allocated to. All of this block is controlled by the serial interface. The timing is represented by data blocks from left to right, such that the green block, data P, is the first byte received. To simplify the description the data has been defined as P-Y to indicate the order. For this example only four channels are indicated. In this case, channels 69, 74, 81 and 90 and they are color coded blue, green, pink, and tan. The MCC has parameters which enable it to control data flow from the serial interface to the appropriate buffers. The first byte received is allocated by the SIRAM to channel 74 and passed to the MCC, which accesses the parameters for this channel finds the appropriate buffer descriptor for channel 74, and then transfers the data to the current buffer for that channel according to all the other controls provided. The next byte is processed by the TDM and this time is directed to channel ninety. The control is handed to the MCC, which accesses the parameters for channel 90, finds the appropriate BD and transfers the data to the next location in the current buffer for channel 90. The next byte is processed in the same way and the data transferred to the current buffer for channel 69 and in this case the TDM recognizes that this is the end of a frame and so that buffer is closed and any following data for that channel will be directed to the next buffer. This process continues for all the data as it is received, the MCC passing the data directed a specific channel to the appropriate buffer. The net result, as shown here, is that as data is received it is collected into the appropriate buffer for the channel it is directed to, so that over a period of time the full message for each channel is combined to the same form as the original. 5 Basic MCC Parameters Internal Memory Programming involves : Channel Specific Parameters Channel Extra Parameters Superchannel Transmit Table +0x8700 MCC1 Global Parameters +0x8800 MCC2 Global Parameters Registers MCCF, MCCE, MCCM SIRAM • One set of global parameters at a predefined location in DPRAM that relate to all channels • Channel-specific parameters for each channel control and run time variables • Channel-specific extra parameters providing pointers to buffer descriptors in external memory for each channel • Receive and transmit interrupt tables located in external memory defined by global parameters • When required, a superchannel table located in DPRAM and defined by global parameters • Three registers-MCCFn (configuration), MCCEn, and MCCMn • SIRAM defining channel routing The MCC uses a number of parameters and registers to control the operation. This shows the basic groups. There is one set of Global Parameters at a predefined location in DPRAM that relate to all channels. These relate to functions that are constant for all channels, and include pointers to the other parameters and functions required. There are channel Specific parameters for each channel control and run time variables. Channel specific Extra Parameters providing pointers to Buffer Descriptors in external memory for each channel. Receive and Transmit Interrupt Tables located in external Memory defined by Global Parameters. When required, a Super-channel Table is located in DPRAM and defined by Global parameters. Three registers, MCCF, MCCE, and MCCM are used for each controller to define the configuration, register events, and enable events to generate interrupt requests. SIRAM is a function of the serial interface defining Channel routing, but when selected to control the MCC, it takes on a slightly different format from the normal serial interface. Notice that the global parameters are located and the fixed offset in dual port ram of hex 8700 for MCC1 and hex 8800 for MCC2. 6 Buffer Descriptors Pointers External Memory Internal Memory Channel Extra Parameters TBASE0 TBPTR0 RBASE0 Buffer Descriptors Channel 0 TxBDs RBPTR0 RBASE255 Channel 0 RxBDs RBPTR255 .. .. . Global Parameters Channel 255 RxBDs MCCBASE XTRABASE 512 Kb As always buffer control is handled by using buffer descriptors. In this case, there is a set of transmit and receive buffer descriptors required for each channel to be used. The pointers to the buffer descriptors are provided in the channel extra parameters, which provide an offset to the top of each BD chain for that channel and an offset to the current or next BD. In this diagram, only channel one transmit buffer descriptors are shown, but BDs for all channels are required. Buffer descriptors are located in a block of up to 512Kb in external memory pointed to by the global parameter MCC base. The extra parameters are located in dual port ram by the global parameter extra base. To examine the channel extra parameters, global parameters, or buffer descriptors, click on the block of interest. 7 Channel-Specific Parameters Internal Memory DPR_base Ch.0 Specific Parameters Ch.1 Specific Parameters Ch.2 Specific Parameters Ch.3 Specific Parameters • These parameters provide all the basic channel-specific control information and run-time variables to handle each individual channel • The parameters are located at the top of DPRAM and each set is located at DPR_base+64*ch_number Ch.255 Specific Parameters • If channels are not used, that area of DPRAM can be used for alternative purposes Channel Extra Parameters Global Parameters The channel specific parameters provide all the basic channel specific control information and run time variables for the CP to handle each individual channel. Each set of channel specific parameters are 64 byte long. They are located at the top of dual port ram and each set is located at DPR base plus 64 times the channel number. Where any channels are not used, that area of dual port ram can be used for alternative purposes. To view any of the parameters click on the block of interest. 8 Registers (One for each MCC) 0 7 MCCF MCC Configuration Register – Maps the MCC channels to TDM channels and this defines which group of 32 channels is routed through each TDM 0 15 MCCE MCC Event Register – Reports events generated in the interrupt queue 0 15 MCCM MCC Mask Register – Enables events to be reported to the interrupt controller There are three registers for each of the multi channel controllers. MCCF is the configuration register which maps the channel groups to the TDM through which they are transferred. MCCE is the event register where events relevant to the MCC are recorded and MCCM is the associated register that enables events to generate an interrupt request. To view any of these registers click on the one of interest. 9 Superchannel • A “superchannel” is a channel that which has several time slots assigned to it. Example Frame 1 24 T1 Frame Typically, one time slot is routed to one channel In some cases, a subscriber requires several time slots. • The programming of receiver superchannels is only required for transparent mode requiring slot synchronization. • HDLC is more efficient when programmed without using the specific superchannel option. A super-channel is simply one where more than one byte of data in the data stream is associated with the single channel. This example shows a T1 frame and the highlighted bytes are handled by a single channel. That is termed a super-channel. The controller has a specific super-channel control option but this should only be used for receivers using transparent mode and requiring slot synchronization. HDLC mode is more efficient not using this special option. Transmitters using super-channels must always use this mode. 10 SI RAM entries for TDM 0 1 2 1 LO OP SUP 3 4 Superchannel entry (all 1 byte entries) Loop/Echo MCC use Route data via MCC 5 6 7 8 MCSEL MCC Channel Select Which channel data is routed to 0-127 for SI1 128-255 for SI2 9 10 11 12 13 CNT 14 15 BYT LST Count If SUP = 0 1 - 8 bits/bytes If SUP = 1 CNT+BYT = : 0001:this is first byte 1110:not first byte Byte Resolution 0 = bit 1 = byte Last Entry (must be in odd entry) wait for next sync Reference Manual section 14.4.3 This diagram shows the programming functions of the SIRAM entries when the serial interface is used for the MCC, which is when bit zero of the entry is set. For a complete explanation of the serial interface, study the serial interface module. The specific functions that have a special relationship for MCC, use the channel selection, super-channel selector, and the count when super-channel is selected. For MCC1, the options for the channel selection are 0-127, and for MCC2, channels 128-255. The data associated with this time slot is handled by the channel selected here. If the special super-channel function is selected by setting bit two then the data associated with this time slot is an 8- bit value and is routed differently from usual by using an additional feature known as the super-channel table. In that case, the function in the entry normally used for defining the data size is used to define whether this slot contains the first byte of the frame. The reason for that is slot synchronization, which is associated with super-channels, requires that new frames should be directed to a new buffer. When the receiver detects the first byte of a new frame it automatically closes the current buffer and opens a new one. When a super-channel is not selected, then the data size is defined by the count and resolution functions, which enables selection of anything between 1- bit and 8- bytes by using a fiddle factor of adding one the content of the count. The controller works it’s way through each entry of the SIRAM until it reaches the one defined as the last. That is the end of the frame, and the controller then waits for the next sync pulse when it resets to the first entry and repeats the process. The loop bit enables the data associated with this time slot to be internally connected to the receiver or transmitter for loop-back or echo. 11 Example SI_RAM for Receive (with Superchannels Requiring Slot Sync) Time Slots Channel Numbers SIxRAM 1 10 5 24 1 5 2 3 5 2 4 5 2 6 7 20 Time slot 1 1 1 2 1 3 1 4 1 5 1 6 1 7 1 8 1 9 10 1 11 1 12 1 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 0 1 1 0 1 1 0 0 0 00000001 00000101 00000010 00000011 00000101 00000010 00000100 00000101 00000010 00000110 00000111 00001000 000 000 000 000 111 111 000 111 111 000 000 000 1 1 1 1 0 0 1 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 00010010 00010011 00010100 000 000 000 1 1 1 0 0 1 22 23 24 Start new buffer Start new buffer When superchannels are used, Rx and Tx SIRAM must be programmed the same way. This example shows how the SIRAM is initialized for the frame organization indicated at the top. The frame is shown as 24 time slots of one byte each. Generally each time slot is associated with an individual channel, but only twenty channels are used, and channels two and five are super-channels. The first slot is for channel one, the second for channel five which is a super-channel, the next for channel two which is also a super-channel. The next is for channel three followed again by two slots for channel five and two. After channel four, there are another pair of channel five and two. All the remainder of the time slots relate to channels 6-20 in ascending order. To obtain the necessary control for this frame the SIRAM entries are shown below. The first time slot entry is not for a superchannel and so bit one is clear. The data is intended for channel one and so the value one is programmed in M channel. The data is one byte and so the count is shown as zero which the fiddle factor makes one, and the resolution is defined as byte. Alternatively, this could have been defined as 8-bits by programming 7 into the count and zero in the resolution. It’s not the end of the frame so bit fifteen is clear. The second entry is for a super-channel and so bit two is set, and the channel number is five. This is the first byte for this channel in this frame and so the count and resolution is initialized to 0001 which will result in this byte being sent to a new buffer. Entry three is also a super-channel and so that bit is set. It’s for channel two so that is the channel number and once again, it’s the first byte in the frame for channel two so the count and resolution is programmed for that. That will result in that byte being sent to a new buffer for channel two. Entry four is for a standard channel, channel three, so the super-channel bit is clear and the count and resolution is defined as one byte. The remainder of the programming follows the same structure except the remainder of the super-channels have the count and resolution initialized to 1110 indicating that they are not the first byte of the frame and therefore the byte will be sent to the same buffer as the previous one unless the buffer is full. As you can see, the last entry has bit 15 set indicating to the controller that is the last entry. The result will be that for every frame received the data will be sent to the channels specified, but in the case of channel two and five a new buffer will be opened for each TDM frame. The data for the other channels will be loaded into buffers in the normal way, being controlled by the buffers and the higher level framing. When super-channels are used both receive and transmit SIRAM must be programmed the same. 12 Superchannel Table Superchannel Table • The superchannel table consists of 16-bit entries where bits 2 - 9 provide the 8-bit channel number. • This must be programmed for superchannel transmitters requiring slot synchronization. Global Parameters +0x24 SCTPBASE • When the SUP bit of the SIRAM is set, then the value in the MCSEL bits is an entry offset into the superchannel table, and the channel number there indicates the actual channel for this data. • Entries in the Table which align to non-superchannel entries in SIRAM must be left vacant. Superchannel Table Entry 9 15 0 2 0 0 0 Channel 0 0 0 0 0 0 0 0 0 0 0 0 0 Number Reference Manual section 27.5 The super-channel table consists of sixteen bit entries where bits 2-9 provide the 8-bit channel number. This must be programmed for super-channel transmitters requiring slot synchronization. When the SUP bit of the SIRAM is set then the value in the MC select bits is an entry offset into the super-channel table and the channel number there indicates the actual channel for this data. In other words, the channel numbers are located in a separate table in an entry defined by the SIRAM channel number. Entries in the table which align to non-super-channel entries in SI ram must be left vacant. The super-channel table must be located in dual port ram with a pointer in the global parameters as an offset from the top. An entry for the table is shown below. 13 Example Initialization for Transmit (with Superchannels Requiring Slot Sync) Time Slots Channel Numbers Time Slot 1 1 2 1 3 1 4 1 5 1 6 1 7 1 8 1 9 1 10 1 11 1 12 1 1 10 5 1 5 2 3 5 2 4 5 2 6 7 SIxRAM 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 0 1 1 0 1 1 0 0 0 1 0 2 3 5 21 4 22 23 6 7 8 1 1 1 1 0 0 1 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 1 0 0 1 0 0 18 19 20 000 000 000 1 0 1 0 1 1 20 Superchannel Table Entry 0 5 1 2 2 3 4 5 5 6 7 8 9 10 11 = 000 000 000 000 111 111 000 111 111 000 000 000 == 22 23 24 24 20 21 22 23 2 5 2 Exercise This example will help in understanding how the super-channel table is used and how to set it up. The only reason the super-channel table is necessary is because at least one slot of the TDM frame is to be a super-channel requiring slot synchronization. If that is not needed, then the table is not required and the channels can simply be controlled by the SIRAM entry. The TDM frame has the same structure used for the previous example and so you might expect the SIRAM entries to be the same, however, you can see that is not the case for some of the super-channels. On the previous slide, there was a rule specified that entries in the table which align to non-super-channel entries in SIRAM must be left vacant. Then to build the table all non-super-channels, that is channels one, three, four, and six through twenty, must have the associated entry in the table vacant, so the table is built with those entries clear. Channel zero is not used, and channels two and five are super-channels and so those entries can be used. The SIRAM is programmed for all the non-super-channels as required and the only consideration here is the programming of the SIRAM entries for channels two and five, and the super-channel table. The first super-channel is channel five, and so the channel select can be directed to the first unused entry in the table, which in this example is entry zero. The value zero is programmed into that SI, ram entry, and entry zero in the table is loaded with five, directing the data to channel five. The next super-channel is two and the next available entry in the table is two, so two is loaded into both the SIRAM channel select and entry two in the table, although the fact that this time slot data is for channel two is purely coincidence as far as the SIRAM is concerned. The same applies for the next incidence of channel five and both SI, ram and the table entry five are programmed with five.Now all the remaining entries in the table up to twenty cannot be used, so the next available entry is twenty one. The next super-channel pointer, which is two, must be entered into the next available table entry, twenty-one, and the table entry number loaded into the SIRAM for that super-channel. The remaining super-channels are initialized accordingly into table entries 22 and three. The remainder of the initialization is as normal. To test your understanding of how this works click on the exercise button which will provide you with an exercise to perform and a result for you to check against. 14 Interrupt Circular Queue • The interrupt circular queue is a structure in memory where interrupt information is stored when a channel event occurs. INTBASE CPU Pointer INTPTR V 0 0 0 1 1 1 1 0 0 0 W 0 0 0 0 0 0 0 0 0 1 Events Events Events Events Events Events Events Events Events Events 32-bits Ch. Number Ch. Number Ch. Number Ch. Number Ch. Number Ch. Number Ch. Number Ch. Number Ch. Number Ch. Number – There are 5 base pointers, one for Tx and four for Rx. These are global parameters defining locations in external memory. – For each table there is a current entry pointer (global parameter) used by the CP for writing new information. – The ‘V’ bit is used by the CP to indicate an updated entry. – The CPU must keep track of updated entries. • When a channel event occurs, the information is written to the location defined by INTPTR (if V = 0), ‘V’ is set, INTPTR increments , and the appropriate bit in the event register is sets which can generate an Interrupt. • The CPU must keep track of the queue and clear ‘V’ for each entry serviced by the interrupt service routine. For some of the simpler controllers there is an event register to record events and provide the option to generate interrupt requests. The same requirements are necessary for the MCC but for each channel, and since it’s possible to have up to 256 channels, a similar process would require the same number of event registers. To alleviate that the event registers are provided as a table of entries in memory defined as the interrupt queue, providing the same recording options for events and includes an entry for the channel that the entry relates to. It also provides a mechanism for servicing the queue appropriately. An event register is still used but only one, and this is used to indicate the type of event generated, and with the mask register enables an interrupt request to the core. A single interrupt queue is required for the transmitter but it’s possible to use up to four queues for the receiver, providing some flexibility for servicing receiver events. There are five base pointers provided in parameter ram, one for transmit and four for receive. These are global parameters defining locations in External memory. An interrupt queue table is shown here. For each table there is a current entry pointer as a global parameter used by the CP for writing new information into the queue. The V-bit is used by the CP for indicating an updated entry. This is to enable the interrupt service routine to find entries requiring action and to prevent an entry that hasn’t been serviced from being overwritten. The wrap bit indicates the end of the table so that when all the entries in the queue have been used the controller wraps back to the top of the table. The CPU must keep track of updated entries, and so the service routine must keep a pointer to the last entry serviced or the next to be serviced. When a channel event occurs, the information is written to the next location in the queue defined by the parameter INT pointer. However, this can only take place if the entries V-bit is clear. The controller sets the appropriate event bit in the entry, sets the V-bit to indicate that it contains valid data and increments the pointer. The appropriate bit in the event register is sets which can generate an interrupt. Events must be serviced as soon as possible and the queue entries cleared before the controller wraps back to a used entry, otherwise an error will occur due to an unavailable entry. When an interrupt request is acknowledged and the service routine handles the events, the associated entries must be made available for future use by clearing the V-bit and of course these must be handled in descending order. 15 Interrupt Queues External Memory Internal Memory Tx Int. Queue Global Parameters Rx Int. Queue 1 TINTBASE TINTPTR CHAMR Rx Int. Queue 2 RINTBASE0 RINTPTR0 RINTBASE1 RINTPTR1 Rx Int. Queue 0 RINTBASE2 RINTPTR2 RINTBASE3 Rx Int. Queue 3 RINTPTR3 The global parameters provide pointers for all the interrupt queues. Each queue has a base pointer to the top of the table and a current pointer to the next entry to be used. As events occur, the controller accesses the entry defined by the parameters. The channel mode register, actually a channel specific parameter, specifies which queue to use for the receiver. To view the channel mode register, global parameters or interrupt queue entries click on the block of interest. 16 Event Processing (1 of 2) Start Event Occurs GOV or GUN ? N INTMSK = 1 ? End Y Y Set bit in MCCE End N Entry [V] = 0 ? N Y Enter event information into queue Set MCCE - QOVn End set V increment INTPTR A When an event occurs, the first check is for a global receiver over-run, when there is no receiver buffer available, or a global transmitter under-run, when there is no data in the FIFO. If one of those is the event then the respective bit is set in the event register and no other event activity is required. If this is another event then is the associated interrupt mask bit in the INTMSK parameter set? If not, the event is masked and the process ends. If the mask is set enabling the event to be generated, is the current entry in the table available, that is the V-bit clear? If not, then an interrupt queue overflow is set in the event register for the queue in use. If the entry is available, the respective bit associated with the event is set, the channel number that the event relates to loaded into the entry, the valid bit set and the queue pointer incremented. The next two slides show flow charts of how events are processed. 17 Event Processing (2 of 2) A RxF Event ? Y N Decrement GRFCNT N GRFCNT = 0 ? Y Load GRFCNT with GRFTHR End Set MCCE [RINTn] End There is one additional special circumstance that could occur for a channel complete frame received. If that is the event, there is the possibility of reducing the number of interrupts due to frames using the received frame threshold facility, for which a counter is provided. The event is only generated subject to the counter expiring. In that case, the counter is decremented and checked for zero. If not, no event is generated but when it does reach zero then it is reloaded with the value in the received frames threshold parameter and the event is written to the event register interrupt bit related to the queue being used. All other events result in the event register update immediately. 18 Commands Command Init Tx params Init Rx params Stop Transmission Stop Reception Effect Initializes parameters for each block of 32 channels starting with channel specified. Only issue when Tx is disabled. As for Tx Disables Tx of specified channel, clears CHAMR[POL], during frame sends ABORT, then Idles/flag Forces select channel to stop receiving, no parameters changed. Reinitialize to restart. Reference Manual sections 27.9 & 13.4 Details These are the commands that are used for the multi channel controllers. As in most cases when the parameters have been initialized the initial parameters command must be issued using the command register. It is vital that this is done after the parameters are initialized. Otherwise the controller will not function correctly. Notice that the command must be issued for each block of channels. Once the controller is operating, transmission can be stopped, which is channel related. This disables the channel specified, disables buffer descriptor polling by clearing the bit in the channel mode register that enables it, sends an abort signal and then idles or flags. Reception can also be stopped which simply disables incoming data. No parameters are changed and to restart the channel it must be re-initialized. For further details on the commands click on the details button. 19 Programming Procedure (1 of 2) Program SIRAM with all channels null Program MCCF, MCCM and clear MCCE Load Global Parameters: MCCBASE MRBLR GRFTHR/ GRFCNT TINTBASE/TINTPTR C-MASK32 * XTRABASE C-MASK16 * RINTBASE0/RINTPTR0 ¶ Clear: MCCSTATE TINTTMP RINTTMPA Load Channel Specific Parameters for each Channel Required ZISTATE * ZIDATA0/1 * INTMASK CHAMR ZDSTATE * ZDDATA0/1 * MFLR Load Channel Extra Parameters TBASEn/TBPTRn RBASEn/RBPTRn As required INIT via CPCR set up Tx Buffer Descriptors set up Rx Buffer Descriptors * predefined values ¶ other options A This is the programming procedure for the multi channel controllers. Generally there is no specific order that the initialization should take place other than a few special cases. Initialization should take place with the SIRAM cleared. Other than for the TSTATE and/or RSTATE parameters, the initialize parameters command must be issued after all parameters have been programmed. The TSTATE and RSTATE parameters must have bit 8 clear. To view the registers click on name of interest, and for parameters click on the block of interest. 20 Programming Procedure (2 of 2) A Initialize Interrupt Queues Clear all entries except the last, which must have WRAP set. Program SIRAM with channel info. • For transmit, CHAMR[POL] must be set to enable the CP to check the BDs are ready • If superchannels are to be used, then additional programming is required as follows : Load T/RSTATE channel specific parameters for each channel with MSB, bit-8 set, and rest zero – Global Parameters: SCTPBASE Channels are now enabled and operate following the next sync pulse. • For all other programming, refer to the Serial Interface Section 6. Reference Manual section 27.12 – DPRAM: Superchannel tables must be set up Exercise If super-channels are to be used then the tables must be set up and the appropriate parameters initialized. The serial interface must also be initialized appropriately. For details on that see the serial interface module. The last operation must be to load the TSTATE and or RSTATE parameter for each channel to function with bit 8 set and 9 through 15 clear. Once that is done the channel will start operating with the next sync pulse. Be aware that for the transmitter the polling enable bit in the channel mode register must be set to enable the BDs to be checked for ready. For an exercise to check your understanding on the requirements for setting up an MCC, click on the exercise button. Be aware that this only shows the initialization process for the MCC and other functions must also be initialized including the port connections, memory controller, and interrupt controller, to name a few. 21 Example Interface to a T1 Framer PA6/L1RSYNC1A PA7/L1TSYNC1A PA8/L1RXD[0]1A PA9/L1TXD[0]1A PC30/CLK2 PC31/CLK1 IFP1 EFP1 ID1 ED1 ECLK1 ICLK1 CSx* A[21-31] D[0-7] PGPL2* PGPL3* CS* A[10-0] D[7-0] RDB* WRB* XCLK MPC8260 PM4388 MPC931FA This example shows the connections for using an MCC with a T1 framer using the PM4388. 22