UCC28950 600-W, Phase-Shifted, Full-Bridge
advertisement

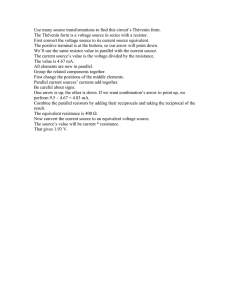
Application Report SLUA560C – September 2010 – Revised June 2011 UCC28950 600-W, Phase-Shifted, Full-Bridge Application Report Michael O'Loughlin Introduction In high-power server applications to meet high-efficiency and green standards some power-supply designers have found it easier to use a phase-shifted, full-bridge converter. This is because the phaseshifted, full-bridge converter can obtain zero-voltage switching on the primary side of the converter reducing switching losses, and EMI and increasing overall efficiency. The purpose of this application report is to review the design of the 600-W, phase-shifted, full-bridge converter for one of these power systems, using TI’s new UCC28950 Phase-Shifted, Full-Bridge Controller, and was based on typical values. In a production design the values need to be modified for worst case conditions. Hopefully this information will aid other power supply designers in their efforts to design an efficient phase-shifted, fullbridge converter. Also note there is a MathCAD Design Tool, (TI Literature Number SLUC210), that goes along with this application note as well. Design Specifications DESCRIPTION Input Voltage Output Voltage MIN TYP 370 V (VINMIN) 390 V (VIN) 11.4 V 12 V (VOUT) Allowable Output Voltage Transient MAX 410 V (VINMAX) 12.6 V 600 mV (VTRAN) Load Step, 90% Output Power 600 W (POUT) Full Load Efficiency 93% (η) Inductor (LOUT) Switching Frequency 200 kHz (fS) SLUA560C – September 2010 – Revised June 2011 Submit Documentation Feedback UCC28950 600-W, Phase-Shifted, Full-Bridge Application Report Copyright © 2010–2011, Texas Instruments Incorporated 1 www.ti.com Functional Schematic CT + QA OUTA V IN R RE C IN QB DA OUTC QD d LS QB OUTB QD d OUTD DC RS _ QC DB T1 CS L OUT + C BP1 VREF RB RI _ RA UCC28950 CP RC RF C SS CZ RD 825k R DELCD R DELAB R TMIN R DELEF V OUT C OUT OUTF OUTE 1uF V OUT QF QE RT R SUM C BP2 1uF 24 1 VREF 2 EA+ GND VDD 3 EA- OUTA 22 OUTA 12V Bias COMP OUTB 21 OUTB 5 SS/EN OUTC 20 OUTC 6 DELAB OUTD 19 7 DELCD OUTE 18 8 DELEF OUTF 17 9 TMIN SYNC 16 CS 15 RT 11 RSUM 12 DCM 22 ohm 23 4 10 CS R LF1 ADEL 14 ADELEF 13 R LF2 1k OUTD OUTE VREF OUTF SYNC R CA1 R DA1 RE C LF 330pF R CA2 R DA2 RG VREF Figure 1. UCC28950 Phase-Shifted, Full-Bridge Functional Schematic Power Budget To meet the efficiency goal a power budget needs to be set. æ 1- h ö PBUDGET = POUT ´ ç ÷ » 45.2 W è h ø 2 UCC28950 600-W, Phase-Shifted, Full-Bridge Application Report (1) SLUA560C – September 2010 – Revised June 2011 Submit Documentation Feedback Copyright © 2010–2011, Texas Instruments Incorporated www.ti.com Preliminary Transformer Calculations (T1) Transformer turns ratio (a1): a1 = NP NS (2) Estimated FET voltage drop (VRDSON): VRDSON = 0.3 V (3) Select transformer turns based on 70% duty cycle (DMAX) at minimum specified input voltage. This will give some room for dropout if a PFC front end is used. a1 = a1 = NP NS (4) (VINMIN - 2 ´ VRDSON )´ DMAX VOUT + VRDSON » 21 (5) Turns ratio rounded to the nearest whole turn. a1 = 21 (6) Calculated typical duty cycle (DTYP) based on average input voltage. DTYP = (VOUT + VRDSON )´ a » 0.66 (VIN - 2 ´ VRDSON ) (7) Output inductor ripple current is set to 20% of the output current. DILOUT = POUT ´ 0.2 = 10 A VOUT (8) Care needs to be taken in selecting a transformer with the correct amount of magnetizing inductance (LMAG). The following equations calculate the minimum magnetizing inductance of the primary of the transformer (T1) to ensure the converter operates in current-mode control. If LMAG is too small the magnetizing current could cause the converter to operate in voltage mode control instead of peak-current mode control. This is because the magnetizing current is too large, it will act as a PWM ramp swamping out the current sense signal across RS. LMAG ³ VIN ´ (1 - DTYP ) » 2.76mH DILOUT ´ 0.5 ´ fS a1 SLUA560C – September 2010 – Revised June 2011 Submit Documentation Feedback (9) UCC28950 600-W, Phase-Shifted, Full-Bridge Application Report Copyright © 2010–2011, Texas Instruments Incorporated 3 www.ti.com Figure 2 shows T1 primary current (IPRIMARY) and synchronous rectifiers QE (IQE) and QF (IQF) currents with respect to the synchronous rectifier gate drive currents. Note that IQE and IQF are also T1’s secondary winding currents as well. Variable D is the converters duty cycle. IPP IPRIMAY IMP2 IMP2 » IPP -DILOUT/ (2 ´a1) IMP 0A D On QEg Off On QFg Off IQE 0A IQF IPS IMS2 IMS IMS2 » IPS -DILOUT/2 0A DILOUT/2 Figure 2. T1 Primary and QE and QF FET Currents 4 UCC28950 600-W, Phase-Shifted, Full-Bridge Application Report SLUA560C – September 2010 – Revised June 2011 Submit Documentation Feedback Copyright © 2010–2011, Texas Instruments Incorporated www.ti.com Calculate T1 secondary RMS current (ISRMS): POUT DILOUT + » 55 A VOUT 2 (10) P DI = OUT - LOUT » 45 A VOUT 2 (11) IPS = IMS IMS2 = IPS ΔI - LOUT » 50 A 2 (12) Secondary RMS current (ISRMS1) when energy is being delivered to the secondary: (I - I ) æD öé ISRMS1 = ç MAX ÷ êIPS ´ IMS + PS MS 3 è 2 ø êë 2 ù ú » 29.6 A úû (13) Secondary RMS current (ISRMS2) when current is circulating through the transformer when QE and QF are both on. (I - I ) æ 1 - DMAX ö é êIPS ´ IMS2 + PS MS2 = ç ÷ 2 3 è ø êë 2 ISRMS2 ù ú » 20.3 A úû (14) Secondary RMS current (ISRMS3) caused by the negative current in the opposing winding during freewheeling period, please refer to Figure 2. ISRMS3 = DILOUT æ 1 - DMAX ö ç 2 ´ 3 ÷ » 1.1A 2 è ø (15) Total secondary RMS current (ISRMS): ISRMS = ISRMS12 + ISRMS22 + ISRMS3 2 » 36.0 A (16) Calculate T1 Primary RMS Current (IPRMS): DILMAG = VINMIN ´ DMAX » 0.47 A LMAG ´ fS æ P DI IPP = ç OUT + LOUT 2 è VOUT ´ h (17) ö1 ÷ + DILMAG » 3.3 A ø a1 (18) é (IPP - IMP )2 ùú ê IPRMS1 = (DMAX ) IPP ´ IMP + » 2.5 A ê ú 3 ë û (19) æ DI ö1 IMP2 = IPP - ç LOUT ÷ » 3.0 A è 2 ø a1 (20) SLUA560C – September 2010 – Revised June 2011 Submit Documentation Feedback UCC28950 600-W, Phase-Shifted, Full-Bridge Application Report Copyright © 2010–2011, Texas Instruments Incorporated 5 www.ti.com T1 Primary RMS (IPRMS1) current when energy is being delivered to the secondary. é IPRMS1 = (DMAX )êêIPP ´ IMP + (IPP - IMP )2 ùú ë 3 ú û » 2.5 A (21) T1 Primary RMS (IPRMS2) current when the converter is free wheeling. IPRMS2 2 é IPP - IMP2 ) ù ( ú » 1.7 A = (1 - DMAX )êIPP ´ IMP2 + 3 êë úû (22) Total T1 primary RMS current (IPRMS) IPRMS = IPRMS12 + IPRMS22 » 3.1A (23) For this design a Vitec transformer was selected part number 75PR8107 that had the following specifications. a1= 21 LMAG = 2.8mH (24) (25) Measure leakage inductance on the Primary: LLK = 4 mH (26) Transformer Primary DC resistance: DCRP = 0.215 W (27) Transformer Secondary DC resistance: DCRS = 0.58 W (28) Estimated transform losses (PT1) are twice the copper loss. NOTE: This is just an estimate and the total losses may vary based on magnetic design. ( ) PT1 » 2 ´ IPRMS 2 ´ DCRP + 2 ´ ISRMS 2 ´ DCRS » 7.0 W (29) Calculate remaining power budget: PBUDGET = PBUDGET - PT1 » 38.1W 6 UCC28950 600-W, Phase-Shifted, Full-Bridge Application Report (30) SLUA560C – September 2010 – Revised June 2011 Submit Documentation Feedback Copyright © 2010–2011, Texas Instruments Incorporated www.ti.com QA, QB, QC, QD FET Selection In this design to meet efficiency and voltage requirements 20 A, 650 V, CoolMOS FETs from Infineon were chosen for QA..QD. FET drain to source on resistance: Rds(on)QA = 0.220 W (31) FET Specified COSS: COSS _ QA _ SPEC = 780pF (32) Voltage across drain-to-source (VdsQA) where COSS was measured, data sheet parameter: VdsQA = 25 V (33) Calculate average Coss [2]: COSS _ QA _ AVG = COSS _ QA _ SPEC VdsQA » 193pF VINMAX (34) QA FET gate charge: QA g = 15nC (35) Voltage applied to FET gate to activate FET: Vg = 12 V (36) Calculate QA losses (PQA) based on Rds(on)QA and gate charge (QAg): PQA = IPRMS 2 ´ Rds(on)QA + 2 ´ QA g ´ Vg ´ fs » 2.1W 2 (37) Recalculate power budget: PBUDGET = PBUDGET - 4 ´ PQA » 29.7 W SLUA560C – September 2010 – Revised June 2011 Submit Documentation Feedback (38) UCC28950 600-W, Phase-Shifted, Full-Bridge Application Report Copyright © 2010–2011, Texas Instruments Incorporated 7 www.ti.com Selecting LS Calculating the shim inductor (LS) is based on the amount of energy required to achieve zero voltage switching. This inductor needs to able to deplete the energy from the parasitic capacitance at the switch node. The following equation selects LS to achieve ZVS at 100% load down to 50% load based on the primary FET’s average total COSS at the switch node. NOTE: There may be more parasitic capacitance than was estimated at the switch node and LS may have to be adjusted based on the actual parasitic capacitance in the final design. VINMAX 2 - LLK » 26 mH LS ³ (2 ´ COSS _ QA _ AVG ) 2 æ IPP DILOUT ö ç 2 - 2 ´ a1 ÷ è ø (39) For this design a 26-µH Vitec inductor was chosen for LS, part number 60PR964. The shim inductor had the following specifications. LS = 26 mH (40) LS DC Resistance: DCRLS = 27mW (41) Estimate LS power loss (PLS) and readjust remaining power budget: 8 PLS = 2 ´ IPRMS 2 ´ DCRLS » 0.5 W (42) PBUDGET = PBUDGET - PLS » 29.2 W (43) UCC28950 600-W, Phase-Shifted, Full-Bridge Application Report SLUA560C – September 2010 – Revised June 2011 Submit Documentation Feedback Copyright © 2010–2011, Texas Instruments Incorporated www.ti.com Output Inductor Selection (LOUT) Inductor LOUT was designed for 20% inductor ripple current (∆ILOUT): DILOUT = LOUT = POUT ´ 0.2 600 W ´ 0.2 = » 10 A VOUT 12 V VOUT ´ (1 - DTYP ) » 2 mH DILOUT ´ fs (44) (45) Calculate output inductor RMS current (ILOUT_RMS): 2 ILOUT _ RMS 2 æ P ö æ DI ö = ç OUT ÷ + ç LOUT ÷ = 50.3 A è VOUT ø è 3 ø (46) A 2-µH inductor from Vitec Electronics Corporation, part number 75PR108, was chosen for this design. The inductor had the following specifications. LOUT = 2 mH (47) Output inductor DC resistance: DCRLOUT = 750 mW (48) Estimate output inductor losses (PLOUT) and recalculate power budget. Note PLOUT is an estimate of inductor losses that is twice the copper loss. Note this may vary based on magnetic manufactures. It is advisable to double check the magnetic loss with the magnetic manufacture. PLOUT = 2 ´ ILOUT _ RMS 2 ´ DCRLOUT » 3.8 W (49) PBUDGET = PBUDGET - PLOUT » 25.4 W (50) SLUA560C – September 2010 – Revised June 2011 Submit Documentation Feedback UCC28950 600-W, Phase-Shifted, Full-Bridge Application Report Copyright © 2010–2011, Texas Instruments Incorporated 9 www.ti.com Output Capacitance (COUT) The output capacitor is being selected based on holdup and transient (VTRAN) load requirements. Time it takes LOUT to change 90% of its full load current: tHU LOUT ´ POUT ´ 0.9 VOUT = = 7.5 ms VOUT (51) During load transients most of the current will immediately go through the capacitors equivalent series resistance (ESRCOUT). The following equations are used to select ESRCOUT and COUT based on a 90% load step in current. The ESR is selected for 90% of the allowable transient voltage (VTRAN), while the output capacitance (COUT) is selected for 10% of VTRAN. ESRCOUT £ COUT VTRAN ´ 0.9 = 12mW POUT ´ 0.9 VOUT (52) POUT ´ 0.9 ´ tHU VOUT ³ » 5.6mF VTRAN ´ 0.1 (53) Before selecting the output capacitance it is also required to calculate the output capacitor RMS current (ICOUT_RMS). ICOUT _ RMS = DILOUT 3 » 5.8 A (54) To meet our design requirements five 1500-µF, aluminum electrolytic capacitors were chosen for the design from United Chemi-Con, part number EKY-160ELL152MJ30S. These capacitors had an ESR of 31 mΩ. Number of output capacitors: n=5 (55) Total output capacitance: COUT = 1500 mF ´ n » 7500 mF (56) Effective output capacitance ESR: ESRCOUT = 31mW = 6.2mW n (57) Calculate output capacitor loss (PCOUT): PCOUT = ICOUT _ RMS 2 ´ ESRCOUT » 0.21W (58) Recalculate remaining Power Budget: PBUDGET = PBUDGET - PCOUT » 25.2 W 10 UCC28950 600-W, Phase-Shifted, Full-Bridge Application Report (59) SLUA560C – September 2010 – Revised June 2011 Submit Documentation Feedback Copyright © 2010–2011, Texas Instruments Incorporated www.ti.com Select FETs QE and QF Selecting FETs for a design is always trial and error. To meet the power requirements of this design we selected 75-V, 120-A FETs, from Fairchild, part number FDP032N08. These FETs’ had the following characteristics. QEg = 152nC (60) Rds(on)QE = 3.2mW (61) Calculate average FET COSS (COSS_QE_AVG) based on the data sheet parameters for COSS (COSS_SPEC), and drain to source voltage where COSS_SPEC was measured (Vds_spec), and the maximum drain to source voltage in the design (VdsQE) that will be applied to the FET in the application. Voltage across FET QE and QF when they are off: VdsQE = VINMAX » 19.5 V a1 (62) Voltage where FET COSS is specified and tested in the FET data sheet: Vds _ spec = 25 V (63) Specified output capacitance from FET data sheet: COSS _ SPEC = 1810pF (64) Average QE and QF COSS [2]: COSS _ QE _ AVG = COSS _ SPEC VdsQE » 1.6nF Vds _ spec (65) QE and QF RMS current: IQE _ RMS = ISRMS = 36.0 A SLUA560C – September 2010 – Revised June 2011 Submit Documentation Feedback (66) UCC28950 600-W, Phase-Shifted, Full-Bridge Application Report Copyright © 2010–2011, Texas Instruments Incorporated 11 www.ti.com To estimate FET switching loss the Vg vs. Qg curve from the FET data sheet needs to be studied. First the gate charge at the beginning of the miller plateau needs to be determined (QEMILLER_MIN) and the gate charge at the end of the miller plateau (QEMILLER_MAX) for the given VDS. QE QE MILLER _ MIN MILLER _ MAX » 52 nC » 100 nC Figure 3. Vg vs. Qg for QE and QF FETs Maximum gate charge at the end of the miller plateau: QEMILLER _ MAX » 100nC (67) Minimum gate charge at the beginning of the miller plateau: QEMILLER _ MIN » 52nC (68) NOTE: The FETs in this design were driven with UCC27324 setup to drive 4-A (IP) of gate drive current. IP » 4 A (69) Estimated FET Vds rise and fall time: tr » t f = 100nC - 52nC 48nC = » 24ns IP 4A 2 2 (70) Estimate QE and QF FET Losses (PQE): PQE = IQE _ RMS 2 ´ Rds(on)QE + POUT f f f ´ VdsQE (tr + t f ) s + 2 ´ COSS _ QE _ AVG ´ VdsQE 2 s + 2 ´ QgQE ´ VgQE s VOUT 2 2 2 (71) PQE » 9.3 W (72) Recalculate the power budget. PBUDGET = PBUDGET - 2 ´ PQE » 6.5 W 12 UCC28950 600-W, Phase-Shifted, Full-Bridge Application Report (73) SLUA560C – September 2010 – Revised June 2011 Submit Documentation Feedback Copyright © 2010–2011, Texas Instruments Incorporated www.ti.com Input Capacitance (CIN) If this converter was designed for a 390-V input, which is generally fed by the output of a PFC boost preregulator. The input capacitance is generally selected based on holdup and ripple requirements. NOTE: The delay time needed to achieve ZVS can act as a duty cycle clamp (DCLAMP). Calculate tank frequency: fR = 1 2p LS ´ (2 ´ COSS _ QA _ AVG ) (74) Estimated delay time: tDELAY = 2 » 314ns f R ´4 (75) Effective duty cycle clamp (DCLAMP): æ1 ö DCLAMP = ç - tDELAY ÷ ´ fs = 94% è fs ø (76) VDROP is the minimum input voltage where the converter can still maintain output regulation. The converter’s input voltage would only drop down this low during a brownout or line-drop condition if this converter was following a PFC pre-regulator. æ 2 ´ DCLAMP ´ VRDSON + a1´ (VOUT + VRDSON ) ö VDROP = ç ÷ = 276.2 V D CLAMP è ø SLUA560C – September 2010 – Revised June 2011 Submit Documentation Feedback UCC28950 600-W, Phase-Shifted, Full-Bridge Application Report Copyright © 2010–2011, Texas Instruments Incorporated (77) 13 www.ti.com CIN was calculated based on one line cycle of holdup: 2 ´ POUT ´ CIN ³ (V 2 IN 1 60Hz - VDROP 2 ) » 364 mF (78) Calculate high frequency input capacitor RMS current (ICINRMS). 2 ICINRMS = I 2 PRMS1 æ POUT ö -ç ÷ = 1.8 A è VINMIN ´ a1 ø (79) To meet the input capacitance and RMS current requirements for this design we chose a 330-µF capacitor from Panasonic part number EETHC2W331EA. CIN = 330 mF (80) This capacitor had a high frequency (ESRCIN) of 150 mΩ this was measured with an impedance analyzer at both 120 and 200 kHz. ESRCIN = 0.150 W (81) Estimate CIN power dissipation (PCIN): PCIN = ICINRMS 2 ´ ESRCIN = 0.5 W (82) Recalculate remaining power budget: PBUDGET = PBUDGET - PCIN » 6.0 W (83) There is roughly 6.0 W left in the power budget left for the current sensing network, and biasing the control device and all resistors supporting the control device. 14 UCC28950 600-W, Phase-Shifted, Full-Bridge Application Report SLUA560C – September 2010 – Revised June 2011 Submit Documentation Feedback Copyright © 2010–2011, Texas Instruments Incorporated www.ti.com Setting Up the Current Sense Network (CT, RS, RRE, DA) The CT chosen for this design had a turn’s ratio (a2) of 100:1 a2 = IP = 100 IS (84) Calculate nominal peak current (IP1) at VINMIN: Peak primary current: æ P DI IP1 = ç OUT + LOUT 2 è VOUT ´ h ö 1 VINMAX ´ DMAX » 3.3 A ÷ + LMAG ´ fs ø a1 (85) The voltage where peak current limit will trip. VP = 2 V (86) Calculate current sense resistor (RS) and leave 200 mV for slope compensation: RS = VP - 0.2 V » 49.9 W IPEAK ´ 1.1 a2 (87) Select a standard resistor for RS: RS = 48.7 W (88) Estimate power loss for RS: 2 PRS æI ö = ç PRMS1 ÷ ´ RS » 0.03 W è a2 ø (89) Calculate maximum reverse voltage (VDA) on DA: VDA = VP DCLAMP » 29.8 V 1 - DCLAMP (90) Estimate DA power loss (PDA): PDA = POUT ´ 0.6 V » 0.01W VINMIN ´ h ´ a2 (91) Calculate RS reset resistor RRE: Resistor RRE is used to reset the current sense transformer CT. RRE = 100 ´ RS = 4.87kW SLUA560C – September 2010 – Revised June 2011 Submit Documentation Feedback (92) UCC28950 600-W, Phase-Shifted, Full-Bridge Application Report Copyright © 2010–2011, Texas Instruments Incorporated 15 www.ti.com Resistor RLF and capacitor CLF form a low pass filter for the current sense signal (Pin 15). For this design we chose the following values. This filter has a low frequency pole (fLFP) at 482 kHz. This should work for most applications but maybe adjusted to suit individual layouts and EMI present in the design. RLF = 1kW (93) CLF = 330pF (94) fLFP = 1 = 482kHz 2pf ´ RLF ´ CLF (95) The UCC28950 VREF output (Pin 1) needs a high frequency bypass capacitor to filter out high frequency noise. This pin needs at least 1 µF of high frequency bypass capacitance (CBP1). Please refer to figure 1 for proper placement. CBP1 = 1 mF (96) The voltage amplifier reference voltage (Pin 2, EA +) can be set with a voltage divider (RA, RB), for this design example we are going to set the error amplifier reference voltage (V1) to 2.5 V. Select a standard resistor value for RB and then calculate resistor value RA. UCC28950 reference voltage: VREF = 5 V (97) Set voltage amplifier reference voltage: V1 = 2.5 V RB = 2.37kW RA = (98) (99) RB ´ (VREF - V1) V1 = 2.37kW (100) Voltage divider formed by resistor RC and RI are chosen to set the DC output voltage (VOUT) at Pin 3 (EA-). Select a standard resistor for RC: RC = 2.37kW (101) Calculate RI: RI = Rc ´ (VOUT - V1) V1 » 9kW (102) Then choose a standard resistor for RI: RI = 16 Rc ´ (VOUT - V1) V1 » 9.09kW (103) UCC28950 600-W, Phase-Shifted, Full-Bridge Application Report SLUA560C – September 2010 – Revised June 2011 Submit Documentation Feedback Copyright © 2010–2011, Texas Instruments Incorporated www.ti.com Compensating the feedback loop can be accomplished by properly selecting the feedback components (RF, CZ and CP). These components are placed as close to pin 3 and 4 as possible of the UCC28950. Calculate load impedance at 10% load (RLOAD): RLOAD VOUT 2 = = 2.4 W POUT ´ 0.1 (104) Approximation of control to output transfer function (GCO(f)) as a function of frequency: GCO (f ) » æ 1 + 2pj ´ f ´ ESRCOUT ´ COUT ö R DVOUT = a1´ a2 ´ LOAD ´ ç ÷´ RS DVC è 1 + 2pj ´ f ´ RLOAD ´ COUT ø 1 æ S(f ) ö S(f ) 1+ +ç ÷ 2p ´ fPP è 2p ´ fPP ø 2 (105) Double pole frequency of GCO(f): fPP » fs = 50kHz 4 (106) Angular velocity: S(f ) = 2p ´ j ´ f (107) Compensate the voltage loop with type 2 feedback network. The following transfer function is the compensation gain as a function of frequency (GC(f)). Please refer to Figure 1 for component placement. GC (f ) = DVC = DVOUT 2pj ´ f ´ RF ´ CZ + 1 æ 2pj ´ f ´ CZ ´ CP ´ RF ö 2pj ´ f ´ (CZ + CP )RI ç + 1÷ CZ + CP è ø (108) th Calculate voltage loop feedback resistor (RF) based on crossing the voltage (fC) loop over at a 10 of the double pole frequency (fPP). fPP = 5kHz 10 RI RF = » 27.9kW æ fPP ö GCO ç ÷ è 10 ø fC = (109) (110) Select a standard resistor for RF. RF » 27.4kW (111) Calculate the feedback capacitor (CZ) to give added phase at crossover. CZ = 1 f 2 ´ p ´ RF ´ C 5 » 5.8nF (112) SLUA560C – September 2010 – Revised June 2011 Submit Documentation Feedback UCC28950 600-W, Phase-Shifted, Full-Bridge Application Report Copyright © 2010–2011, Texas Instruments Incorporated 17 www.ti.com Select a standard capacitance value for the design. CZ = 5.6nF (113) Put a pole at two times fC. CP = 1 » 580pF 2 ´ p ´ RF ´ fC ´ 2 (114) Select a standard capacitance value for the design. CP = 560pF (115) Loop gain as a function of frequency (TV(f)) in dB. TV dB(f ) = 20log (GC (f ) ´ GCO (f ) ) (116) Plot theoretical loop gain and phase to graphically check for loop stability (Figure 4). The theoretical loop gain crossed over at roughly 3.7 kHz with a phase margin of greater than 90 degrees. NOTE: It is wise to check your loop stability of your final design with transient testing and/or a network analyzer and adjust the compensation (GC(f)) feedback as necessary. 180 60 135 40 90 20 45 0 0 -20 -45 -40 -90 -60 TvdB(f) -135 ?Tv(f) -180 -80 100 Phase in Degrees Gain in dB Tv(f) Frequency Response 80 1000 10000 100000 Frequency in Hz Figure 4. Loop Gain (TVdB(f)), Loop Phase (θTV(f)) To limit over shoot during power up the UCC28950 has a soft-start function (SS, Pin 5) which in this application was set for a soft start time of 15 ms (tSS). t ss = 15ms CSS = 18 (117) t SS ´ 25 mA » 123nF V1 + 0.55 UCC28950 600-W, Phase-Shifted, Full-Bridge Application Report (118) SLUA560C – September 2010 – Revised June 2011 Submit Documentation Feedback Copyright © 2010–2011, Texas Instruments Incorporated www.ti.com Select a standard capacitor for the design. CSS = 150nF (119) This application note presents a fixed delay approach to achieving ZVS from 100% load down to 50% load. When the converter is operating below 50% load the converter will be operating in valley switching. In order to achieve zero voltage switching on switch node of QBd, the turn-on (tABSET) delays of FETs QA and QB needs to be initially set based on the interaction of LS and the theoretical switch node capacitance. The following equations are used to set tABSET initially. Equate shim inductance to two times COSS capacitance: 2p ´ fRLS = 1 2p ´ fR ´ (2 ´ COSS _ QA _ AVG ) (120) Calculate tank frequency: fR = 1 2p LS ´ (2 ´ COSS _ QA _ AVG ) (121) Set initial tABSET delay time and adjust as necessary. NOTE: The 2.25 factor of the tABSET equation was derived from empirical test data and may vary based on individual design differences. t ABSET = 2.25 » 346ns f R ´4 (122) The resistor divider formed by RDA1 and RDA2 programs the tABSET, tCDSET delay range of the UCC28950. Select a standard resistor value for RDA1. NOTE: tABSET can be programmed between 30 ns to 1000 ns. RDA1 = 8.25kW (123) The voltage at the ADEL input of the UCC28950 (VADEL) needs to be set with RDA2 based on the following conditions. If tABSET > 155 ns set VADEL = 0.2 V, tABSET can be programmed between 155 ns and 1000 ns: If tABSET ≤ 155 ns set VADEL = 1.8 V, tABSET can be programmed between 29 ns and 155 ns: Based on VADEL selection, calculate RDA2: RDA 2 = RDA1 ´ VADEL » 344 W 5V - VADEL (124) Select the closest standard resistor value for RDA2: RDA 2 = 348 W (125) SLUA560C – September 2010 – Revised June 2011 Submit Documentation Feedback UCC28950 600-W, Phase-Shifted, Full-Bridge Application Report Copyright © 2010–2011, Texas Instruments Incorporated 19 www.ti.com Recalculate VADEL based on resistor divider selection: VADEL = 5 V ´ RDA 2 = 0.202 V RDA1 + RDA 2 (126) Resistor RDELAB programs tABSET: RDELAB = (t ABSET - 5ns) (0.15 V + VADEL ´ 1.46) ´ 103 1 ´ ´ » 30.4kW ns 5 1A (127) Select a standard resistor value for the design: RDELAB = 30.1kW (128) NOTE: Once you have a prototype up and running it is recommended you fine tune tABSET at light load to the peak and valley of the resonance between LS and the switch node capacitance. In this design the delay was set at 10% load. Please refer to Figure 5. Set t ABSET at resonant tank Peak and Valley t ABSET = t 1 - t 0 t ABSET = t 4 - t 3 QB d QA g Miller Plateau tMILLER = t QB 2 - t1 Miller Plateau g t MILLER = t 5 - t 4 t0 t1 t2 t3 t4 t5 Figure 5. tABSET to Achieve Valley Switching at Light Loads 20 UCC28950 600-W, Phase-Shifted, Full-Bridge Application Report SLUA560C – September 2010 – Revised June 2011 Submit Documentation Feedback Copyright © 2010–2011, Texas Instruments Incorporated www.ti.com The initial starting point for the QC and QD turn on delays (tCDSET) should be initially set for the same delay as the QA and QB turn on delays (Pin 6). The following equations program the QC and QD turn-on delays (tCDSET) by properly selecting resistor RDELCD (Pin 7). t ABSET = t CDSET (129) Resistor RDELCD programs tCDSET: RDELCD = (t ABSET - 5ns) (0.15 V + VADEL ´ 1.46) ´ 103 1 ´ ´ » 30.4kW ns 5 1A (130) Select a standard resistor for the design: RDELCD = 30.1kW (131) NOTE: Once you have a prototype up and running it is recommended to fine tune tCDSET at light load. In this design the CD node was set to valley switch at roughly 10% load. Please refer to Figure 6. Obtaining ZVS at lighter loads with switch node QDd is easier due to the reflected output current present in the primary of the transformer at FET QD and QC turnoff/on. This is because there was more peak current available to energize LS before this transition, compared to the QA and QB turnoff/on. Set t t CDSET QD QC =t 1 CDSET t CDSET - t0 =t 4 - t3 d g Miller Plateau t MILLER QD at resonant tank Peak and Valley =t 2 -t1 Miller Plateau g t MILLER t 0 t1 t 2 =t 5 -t4 t 3 t4 t 5 Figure 6. tCDSET to Achieve Valley Switching at Light Loads SLUA560C – September 2010 – Revised June 2011 Submit Documentation Feedback UCC28950 600-W, Phase-Shifted, Full-Bridge Application Report Copyright © 2010–2011, Texas Instruments Incorporated 21 www.ti.com There is a programmable delay for the turnoff of FET QF after FET QA turnoff (tAFSET) and the turnoff of FET QE after FET QB turnoff (tBESET). A good place to set these delays is 50% of tABSET. This will ensure that the appropriate synchronous rectifier turns off before the AB ZVS transition. If this delay is too large it will cause OUTE and OUTF not to overlap correctly and it will create excess body diode conduction on FETs QE and QF. t AFSET = tBESET = t ABSET ´ 0.5 (132) The resistor divider formed by RCA1 and RCA2 programs the tAFSET and tBESET delay range of the UCC28950. Select a standard resistor value for RCA1. NOTE: tEFSET and tBESET can be programmed between 32 ns to 1100 ns. RCA1 = 8.25kW (133) The voltage at the ADELEF pin of the UCC28950 (VADELEF) needs to be set with RCA2 based on the following conditions. If tAFSET < 170 ns set VADEL = 0.2 V, tABSET can be programmed between 32 ns and 170 ns: If tABSET > or = 170 ns set VADEL = 1.7 V, tABSET can be programmed between 170 ns and 1100 ns: Based on VADELEF selection, calculate RCA2: RCA 2 = RCA1 ´ VADELEF » 4.25kW 5 V - VADELEF (134) Select the closest standard resistor value for RCA2: RCA 2 = 4.22kW (135) Recalculate VADELEF based on resistor divider selection: VADELEF = 5 V ´ RCA 2 = 1.692 V RCA1 + RCA 2 (136) The following equation was used to program tAFSET and tBESET by properly selecting resistor RDELEF. RDELEF = 22 (t AFSET ´ 0.5 - 4ns ) ´ (2.65 V - VADELEF ´ 1.32 )´ 103 ´ ns 5 UCC28950 600-W, Phase-Shifted, Full-Bridge Application Report 1 » 14.1kW 1A (137) SLUA560C – September 2010 – Revised June 2011 Submit Documentation Feedback Copyright © 2010–2011, Texas Instruments Incorporated www.ti.com A standard resistor was chosen for the design. RDELEF = 14kW (138) Resistor RTMIN programs the minimum duty cycle on time (tMIN) that the UCC28950 (Pin 9) can demand before entering burst mode. If the UCC28950 controller tries to demand a duty cycle on time of less than tMIN the power supply will go into burst mode operation. Please see the UCC28950 data sheet for details regarding burst mode. For this design we set the minimum on time to 100 ns. tMIN = 100ns (139) The minimum on time is set by selecting RTMIN with the following equation. RTMIN = (tMIN - 15ns) ´ 103 » 12.9kW 6.6s (140) A standard resistor value is then chosen for the design. RTMIN = 13kW (141) There is a pin that is provided for setting up the converter switching frequency (Pin 10). The frequency can be selected by adjusting timing resistor RT. æ ö 6 WHz ç 2.5 ´ 10 V W÷ - ÷ ´ (VREF - 2.5 V )´ 2.5 ´ 103 » 60kW RT = ç fS V÷ ç 2 è ø (142) Select a standard resistor for the design. RT = 61.9kW (143) The UCC28950 also provides slope compensation for peak current mode control (Pin 12). This can be set by setting RSUM with the following equations. The following equations will calculate the required amount of slope compensation (VSLOPE) that is needed for loop stability. NOTE: The change in magnetizing current on the primary dILMAG contributes to slope compensation. DILMAG = VIN (1 - DTYP ) LMAG ´ fs = 234mA (144) SLUA560C – September 2010 – Revised June 2011 Submit Documentation Feedback UCC28950 600-W, Phase-Shifted, Full-Bridge Application Report Copyright © 2010–2011, Texas Instruments Incorporated 23 www.ti.com To help improve noise immunity VSLOPE is set to have a total slope that will equal 10% of the maximum current sense signal (0.2 V) over one inductor switching period. VSLOPE1 = 0.2 V ´ fS = 0.04 V ms (145) æ dILOUT ö ç a1´ 2 - dILMAG ÷ ´ RS ´ fS 1mV ø = VSLOPE2 = è ms a2 ´ (1 - DTYP ) (146) If VSLOPE2 < VSLOPE1 set VSLOPE = VSLOPE1 If VSLOPE2 ≥ VSLOPE1 set VSLOPE = VSLOPE2 RSUM 2.5 V ´ 103 W = » 125.4kW VSLOPE ´ 0.5 ms (147) Select a standard resistor for RSUM. RSUM = 127kW (148) To increase efficiency at lighter loads the UCC28950 is programmed (Pin 12, DCM) under light load conditions to turn off the synchronous FETs on the secondary side of the converter (QE and QF). This threshold is programmed with resistor divider formed by RE and RG. This DCM threshold needs to be set at a level before the inductor current goes discontinues. The following equation sets the synchronous rectifiers to turnoff at roughly 15% load current. VRS æ POUT ´ 0.15 DILOUT + ç VOUT 2 è = a1´ a2 ö ÷ ´ RS ø = 0.29 V (149) Select a standard resistor value for RG. RG = 1kW (150) Calculate resistor value RE. RE = RG (VREF - VRS ) VRS » 16.3kW (151) Select a standard resistor value for this design RE = 16.9kW 24 (152) UCC28950 600-W, Phase-Shifted, Full-Bridge Application Report SLUA560C – September 2010 – Revised June 2011 Submit Documentation Feedback Copyright © 2010–2011, Texas Instruments Incorporated www.ti.com Figure 7. Daughter Board Schematic NOTE: Black triangles designate not populated. SLUA560C – September 2010 – Revised June 2011 Submit Documentation Feedback UCC28950 600-W, Phase-Shifted, Full-Bridge Application Report Copyright © 2010–2011, Texas Instruments Incorporated 25 + + + + + + + www.ti.com Figure 8. Power Stage Schematic NOTE: It is recommended to use an RCD clamp to protect the output synchronous FETs from over voltage due to switch node ringing. This RCD clamp is formed by diodes D4, D6 and resistor R6, R8 and R9 and capacitor C1 in the power stage schematic, . 26 UCC28950 600-W, Phase-Shifted, Full-Bridge Application Report SLUA560C – September 2010 – Revised June 2011 Submit Documentation Feedback Copyright © 2010–2011, Texas Instruments Incorporated www.ti.com 600W UCC28950 Effiency 96% 95% 94% 93% 92% 91% 90% 89% 88% 87% 86% 370V Efficiency 85% 390V Efficiency 84% 410V Efficiency 83% 10% 20% 30% 40% 50% 60% 70% 80% 90% 100% Figure 9. 600-W Phase Shifted Full Bridge Efficiency Full bridge gate drives and primary switch nodes (QBd and QDd) at VIN = 390 V, IOUT = 5 A. Valley Switching QB d/Q4 d QD d/Q3 Valley Switching d Q3 Q4 g QB/Q4 = off QB/Q4 = on g QD/Q3 = off QD/Q3 = on QC/Q2 = on QC/Q2 = off 0V QA/Q1 = on QA/QB = off t ABSET t D Slight Delay after t ABSET 0V t CDSET Figure 10. Q4g Q4d, VIN = 390 V, IOUT = 5 A t D Slight Delay after t CDSET before Miller Plateau before Miller Plateau Figure 11. Q3g Q3d, VIN = 390 V, IOUT = 5 A NOTE: The gate drives look slightly different than Figure 5 and Figure 6. This is because they were driven with 1:2 gate drive transformers instead of 1:1. At 10% load the primary switch nodes were valley switching SLUA560C – September 2010 – Revised June 2011 Submit Documentation Feedback UCC28950 600-W, Phase-Shifted, Full-Bridge Application Report Copyright © 2010–2011, Texas Instruments Incorporated 27 www.ti.com Full bridge gate drives and switch nodes at VIN = 390 V, IOUT = 10 A Valley Switching QB d /Q4 d QD d /Q3 d Q4 g Q3 g ZVS QB/Q4 = off 0V QA/Q1 = on QA/QB = off tABSET tD Slight Delay after t before Miller Plateau 0V QD/Q3 = off QB/Q4 = on QD/Q3 = on 0V QC/Q2 = on QC/Q2 = off t CDSET ABSET tD Slight Delay after t before Miller Plateau CDSET Figure 13. Q3g Q3d, VIN = 390 V, IOUT = 10 A Figure 12. Q4g Q4d, VIN = 390 V, IOUT = 10 A NOTE: Switch node QBd/Q4d is valley switching and node QDd/Q3d has achieved ZVS. Please refer to Figure 12 and Figure 13. It is not uncommon for switch node QDd/Q3d to obtain ZVS before QBd/Q4d. This is because during the QDd/Q3d switch node voltage transition, the reflected output current provides immediate energy for the LC tanking at the switch node. Where at the QBd/Q4d switch node transition the primary has been shorted out by the high side or low side FETs in the H bridge. This transition is dependent on the energy stored in LS and LLK to provide energy for the LC tanking at switch node QBd/Q4d making it take longer to achieve ZVS. Full bridge gate drives and switch nodes at VIN = 390 V, IOUT = 25 A ZVS Achieved QB d/Q4 d QD d/Q3 d Q3 g ZVS Q4 g QB/Q4 = off QD/Q3 = off QB/Q4 = on QD/Q3 = on 0V 0V QA/Q1 = on QA/QB = off QC/Q2 = on t ABSET QC/Q2 = off t CDSET Figure 14. Q4g Q4d, VIN = 390 V, IOUT = 25 A Figure 15. Q3g Q3d, VIN = 390 V, IOUT = 25 A NOTE: When the converter is running at 25 A both switch nodes are operating into zero voltage switching (ZVS). It is also worth mentioning that there is no evidence of the gate miller plateau during gate driver switching. This makes sense because the voltage across the drain and source of FETs QA through QD has already transition before the gate drives have transitioned. 28 UCC28950 600-W, Phase-Shifted, Full-Bridge Application Report SLUA560C – September 2010 – Revised June 2011 Submit Documentation Feedback Copyright © 2010–2011, Texas Instruments Incorporated www.ti.com Full bridge gate drives and switch nodes at VIN = 390 V, IOUT = 50 A ZVS QB d /Q4 d QD d/Q3 d Q3 g ZVS Q4 g QB/Q4 = off QD/Q3 = off QB/Q4 = on QD/Q3 = on 0V 0V QA/Q1 = on QA/QB = off QC/Q2 = on t ABSET QC/Q2 = off t CDSET Figure 16. Q4g Q4d, VIN = 390 V, IOUT = 25 A Figure 17. Q3g Q3d, VIN = 390 V, IOUT = 25 A NOTE: ZVS was maintained from 50% to 100% output power. References 1. Bill Andreycak, “Phase Shifted, Zero Voltage Transition Design Considerations and the UC3875 PWM Controller” Unitrode Application Note SLUA107, 9/5/1999 2. Lazlo Balogh, “Design and Application Guide for High Speed MOSFET Gate Drive” Unitrode Power Supply Design Seminar 1400, Topic 2, 2001 SLUA560C – September 2010 – Revised June 2011 Submit Documentation Feedback UCC28950 600-W, Phase-Shifted, Full-Bridge Application Report Copyright © 2010–2011, Texas Instruments Incorporated 29 IMPORTANT NOTICE Texas Instruments Incorporated and its subsidiaries (TI) reserve the right to make corrections, enhancements, improvements and other changes to its semiconductor products and services per JESD46, latest issue, and to discontinue any product or service per JESD48, latest issue. Buyers should obtain the latest relevant information before placing orders and should verify that such information is current and complete. All semiconductor products (also referred to herein as “components”) are sold subject to TI’s terms and conditions of sale supplied at the time of order acknowledgment. TI warrants performance of its components to the specifications applicable at the time of sale, in accordance with the warranty in TI’s terms and conditions of sale of semiconductor products. Testing and other quality control techniques are used to the extent TI deems necessary to support this warranty. Except where mandated by applicable law, testing of all parameters of each component is not necessarily performed. TI assumes no liability for applications assistance or the design of Buyers’ products. Buyers are responsible for their products and applications using TI components. To minimize the risks associated with Buyers’ products and applications, Buyers should provide adequate design and operating safeguards. TI does not warrant or represent that any license, either express or implied, is granted under any patent right, copyright, mask work right, or other intellectual property right relating to any combination, machine, or process in which TI components or services are used. Information published by TI regarding third-party products or services does not constitute a license to use such products or services or a warranty or endorsement thereof. Use of such information may require a license from a third party under the patents or other intellectual property of the third party, or a license from TI under the patents or other intellectual property of TI. Reproduction of significant portions of TI information in TI data books or data sheets is permissible only if reproduction is without alteration and is accompanied by all associated warranties, conditions, limitations, and notices. TI is not responsible or liable for such altered documentation. Information of third parties may be subject to additional restrictions. Resale of TI components or services with statements different from or beyond the parameters stated by TI for that component or service voids all express and any implied warranties for the associated TI component or service and is an unfair and deceptive business practice. TI is not responsible or liable for any such statements. Buyer acknowledges and agrees that it is solely responsible for compliance with all legal, regulatory and safety-related requirements concerning its products, and any use of TI components in its applications, notwithstanding any applications-related information or support that may be provided by TI. Buyer represents and agrees that it has all the necessary expertise to create and implement safeguards which anticipate dangerous consequences of failures, monitor failures and their consequences, lessen the likelihood of failures that might cause harm and take appropriate remedial actions. Buyer will fully indemnify TI and its representatives against any damages arising out of the use of any TI components in safety-critical applications. In some cases, TI components may be promoted specifically to facilitate safety-related applications. With such components, TI’s goal is to help enable customers to design and create their own end-product solutions that meet applicable functional safety standards and requirements. Nonetheless, such components are subject to these terms. No TI components are authorized for use in FDA Class III (or similar life-critical medical equipment) unless authorized officers of the parties have executed a special agreement specifically governing such use. Only those TI components which TI has specifically designated as military grade or “enhanced plastic” are designed and intended for use in military/aerospace applications or environments. Buyer acknowledges and agrees that any military or aerospace use of TI components which have not been so designated is solely at the Buyer's risk, and that Buyer is solely responsible for compliance with all legal and regulatory requirements in connection with such use. TI has specifically designated certain components as meeting ISO/TS16949 requirements, mainly for automotive use. In any case of use of non-designated products, TI will not be responsible for any failure to meet ISO/TS16949. Products Applications Audio www.ti.com/audio Automotive and Transportation www.ti.com/automotive Amplifiers amplifier.ti.com Communications and Telecom www.ti.com/communications Data Converters dataconverter.ti.com Computers and Peripherals www.ti.com/computers DLP® Products www.dlp.com Consumer Electronics www.ti.com/consumer-apps DSP dsp.ti.com Energy and Lighting www.ti.com/energy Clocks and Timers www.ti.com/clocks Industrial www.ti.com/industrial Interface interface.ti.com Medical www.ti.com/medical Logic logic.ti.com Security www.ti.com/security Power Mgmt power.ti.com Space, Avionics and Defense www.ti.com/space-avionics-defense Microcontrollers microcontroller.ti.com Video and Imaging www.ti.com/video RFID www.ti-rfid.com OMAP Applications Processors www.ti.com/omap TI E2E Community e2e.ti.com Wireless Connectivity www.ti.com/wirelessconnectivity Mailing Address: Texas Instruments, Post Office Box 655303, Dallas, Texas 75265 Copyright © 2015, Texas Instruments Incorporated