SESSION 5A P4 - ONG
advertisement

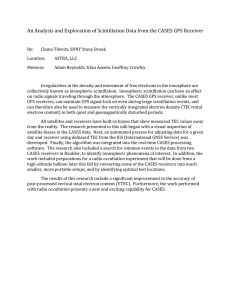
CALCULATION IN ESTIMATING TOTAL ELECTRON CONTENT GPS Ong Hui Poh and Md.Nor Kamarudin Geomatics Engineering Department, Faculty of Geoinformation Science and Engineering Universiti Teknologi Malaysia, 81310 Skudai Johor Tel: 012-351 6508 Fax: 07-557 1823 Email: harvest_nwk@yahoo.com Abstract Nowadays, with the increasing cost of GPS equipment, permanent GPS tracking stations have been installed at strategic places almost all over the world. The permanent GPS tracking stations are set to operate 24 hours a day, all year round, and one of these is the Malaysia Active Satellites System (MASS). The MASS network is used in a variety of applications in Malaysia involving the determination of precise positions, unified datum, earth rotation parameters and coastal studies as well as in atmospheric (tropospheric and ionospheric) modeling. The ionospheric delay is a function of the Total Electron Content (TEC) along the signal path and the frequency of the propagate signals. This study describes the potential of building a calculation by Software using MATLAB in estimating the TEC values from GPS observations collected by MASS network. 1.0 INTRODUCTION OF PROPOSAL 1.1 Introduction The Ionosphere is a layer of the upper atmosphere where some of the electrons have been removed from the atoms and molecules to form free electrons and positively charged ions. The most common way happened is by extreme ultraviolet light from the sun separating a single electron from an oxygen atom. The maximum ionization takes place near a height of about 300km (about 200 miles). Only one part in a thousand of the material is ionized here. Most of the gas remains electrically neutral. The presence of the electrons which are free to move alters the speed that electromagnetic waves travel. One well known effect of the ionosphere is the bending of the shortwave radio transmissions, so that it is possible to receive signals from stations that are over the horizon. The Global Positioning Satellites (GPS) broadcast at two different frequencies which are L1 and L2 frequency. This allows positional measurements to be corrected for ionospheric effects. Alternately, information about the ionosphere can be derived. The total electron content (TEC) is a measure of the total amount of electrons along a particular line of sight. Unit of the TEC is 10-16—electrons per square centimeter. The ionospheric delay is a function of the Total Electron Content (TEC) along the signal path and the frequency of the propagate signals. Since the ionosphere is a dispersive medium for radio waves, a dualfrequency GPS receiver can minimize ionopheric delay through a linear combination of L1 and L2 observables. Nowadays, with the increasing cost of GPS equipment, permanent GPS tracking stations have been installed at strategic place almost all over the world. The permanent GPS tracking 1 stations are normally set to operate 24 hours a day, all year round, and one of these is the Malaysia Active Satellites System (MASS). The MASS network is used in a variety of applications in Malaysia involving the determination of precise positions, unified datum, earth rotation parameters and coastal studies as well as in atmospheric (tropospheric and ionospheric) modeling. This studies describes the potential of building a calculation by Software MATHLAB in estimating the TEC values in dual-frequency GPS observations collected by MASS network with respect to ionospheric layers. 1.1 Problem Statements Current trend indicates that for the most precise, effective, economical and fast applications in GPS technology, some calculation or software should be programmed. The values of TEC can be estimated with respect to the ionopheric shell heights using the continuous GPS tracking data, for example MASS GPS data. The GPS data can be processed by using the Bernese software. The global model has been adopted as a standard model for estimating the TEC values. In Malaysia, no software or calculation has been programmed to estimate the TEC values which are then used for environmental studies. 1.2 Objectives Of Study The main objective of this study is to develop a program for calculating the TEC values. The other objectives are 1) To compare the changes between the latest TEC values and the TEC values in the past few years with respect to the ionospheric layers in Malaysia. 2) To give more accurate MASS GPS data with respect to know the values of ionopheric delay. 1.3 Scopes Of Study This studies more concentrate on building a calculation based on programming language MATHLAB to estimate the TEC values. In order to fulfill the objectives of studies, literature review about the operation of GPS Signal in positioning, MASS station, formulation to estimate TEC, research on the use of TEC values will be drafted. There are two set of MASS observations data collected. One of these is collected past few years ago which another one collected recently. Two of these observations will be used for validation of calculation. Besides using software MATHLAB to create a new calculation, Bernese GPS Processing System involved to help processing the GPS observations from MASS station. Other programming software such as Fortran Power Station 4.0 and Visual Basic 6.0 might be used to build a user friendly calculation. 1.4 Importance Of Study In order to achieve the higher accuracies and control level of positioning in land surveying, especially in GPS surveying, we need to reduce the error caused by ionospheric delay. These studies are contributing a new calculation to reduce the error of GPS signals in Malaysia. This calculation are strongly believed estimate the TEC values when combined with other scientific data, the ionospheric information can be used for environmental studies such as 2 continuous weather monitoring and climatology, microwave communication signals and other geoscience application. 2.0 LITERATURE REVIEW 2.1 Introduction to GPS World The Global Positioning System (GPS) is a satellite-based navigation system made up of a network of 24 satellites placed into orbit by the U.S. Department of Defense. GPS was originally intended for military applications, but in the 1980s, the government made the system available for civilian use. GPS works in any weather conditions, anywhere in the world, 24 hours a day. There are no subscription fees or setup charges to use GPS. GPS satellites circle the earth twice a day in a very precise orbit and transmit signal information to earth. GPS receivers take this information and use triangulation to calculate the user's exact location. Essentially, the GPS receiver compares the time a signal was transmitted by a satellite with the time it was received. The time difference tells the GPS receiver how far away the satellite is. Now, with distance measurements from a few more satellites, the receiver can determine the user's position and display it on the unit's electronic map. A GPS receiver must be locked on to the signal of at least three satellites to calculate a 2D position (latitude and longitude) and track movement. With four or more satellites in view, the receiver can determine the user's 3D position (latitude, longitude and altitude). Once the user's position has been determined, the GPS unit can calculate other information, such as speed, bearing, track, trip distance, distance to destination, sunrise and sunset time and more. Figure 1: GPS Measurement. Today's GPS receivers are extremely accurate, thanks to their parallel multi-channel design. The receivers are quick to lock onto satellites when first turned on and they maintain strong locks, even in dense foliage or urban settings with tall buildings. Certain atmospheric factors and other sources of error can affect the accuracy of GPS receivers. Users can also get better accuracy with Differential GPS (DGPS), which corrects GPS signals to within an average of three to five meters. The U.S. Coast Guard operates the most common DGPS correction service. This system consists of a network of towers that receive GPS signals and transmit a corrected signal by beacon transmitters. In order to get the corrected signal, users must have a differential beacon receiver and beacon antenna in addition to their GPS. 3 The 24 satellites that make up the GPS space segment are orbiting the earth about 12,000 miles above us. They are constantly moving, making two complete orbits in less than 24 hours. These satellites are traveling at speeds of roughly 7,000 miles an hour. GPS satellites are powered by solar energy. They have backup batteries onboard to keep them running in the event of a solar eclipse, when there's no solar power. Small rocket boosters on each satellite keep them flying in the correct path. Here are some other interesting facts about the GPS satellites (also called NAVSTAR, the official U.S. Department of Defense name for GPS): The first GPS satellite was launched in 1978. A full constellation of 24 satellites was achieved in 1994. Each satellite is built to last about 10 years. Replacements are constantly being built and launched into orbit. A GPS satellite weighs approximately 2,000 pounds and is about 17 feet across with the solar panels extended. Transmitter power is only 50 watts or less. Figure 2: Constellation of Satellites 2.2 GPS Signals GPS satellites transmit two low power radio signals, designated L1 and L2. Civilian GPS uses the L1 frequency of 1575.42 MHz in the UHF band. The signals travel by line of sight, meaning they will pass through clouds, glass and plastic but will not go through most solid objects such as buildings and mountains. A GPS signal contains three different bits of information — a pseudorandom code, ephemeris data and almanac data. The pseudorandom code is simply an I.D. code that identifies which satellite is transmitting information. Ephemeris data tells the GPS receiver where each GPS satellite should be at any time throughout the day. Each satellite transmits ephemeris data showing the orbital information for that satellite and for every other satellite in the system. Almanac data, which is constantly transmitted by each satellite, contains important information about the status of the satellite (healthy or unhealthy), current date and time. This part of the signal is essential for determining a position. Factors that can degrade the GPS signal and thus affect accuracy include the following: 4 Ionosphere and troposphere delays —the satellite signal slows as it passes through the atmosphere. The GPS system uses a built-in model that calculates an average amount of delay to partially correct for this type of error. Signal multipath — this occurs when the GPS signal is reflected off objects such as tall buildings or large rock surfaces before it reaches the receiver. This increases the travel time of the signal, thereby causing errors. Receiver clock errors — a receiver's built-in clock is not as accurate as the atomic clocks onboard the GPS satellites. Therefore, it may have very slight timing errors. Orbital errors — also known as ephemeris errors, these are inaccuracies of the satellite's reported location. Number of satellites visible — the more satellites a GPS receiver can "see," the better the accuracy. Buildings, terrain, electronic interference, or sometimes even dense foliage can block signal reception, causing position errors or possibly no position reading at all. GPS units typically will not work indoors, underwater or underground. Satellite geometry/shading — this refers to the relative position of the satellites at any given time. Ideal satellite geometry exists when the satellites are located at wide angles relative to each other. Poor geometry results when the satellites are located in a line or in a tight grouping. Intentional degradation of the satellite signal — Selective Availability (SA) is an intentional degradation of the signal once imposed by the U.S. Department of Defense. SA was intended to prevent military adversaries from using the highly accurate GPS signals. The government turned off SA in May 2000, which significantly improved the accuracy of civilian GPS receivers. Figure 3: GPS Signal Delays. 2.3 Ionosphere Layers The ionosphere is contained in the uppermost layers of the earth’s atmosphere, where most of the earth-bound ultraviolet light and atomic particles emitted by the sun are absorbed. This region of free electrons and ionized atoms fluctuates with solar activity and under severe conditions has interrupted communications and electrical power over wide areas. The ionosphere 5 also has a severe impact on the signals from the GPS satellites, as well as millions of other users employ for positioning and navigation. For convenience, we divide the Ionosphere into four broad regions called D, E, F, and topside. These regions may be further divided into several regularly occurring layers, such as F1 or F2. a) D-Region: The region between about 75 and 95km above the Earth in which the (relatively weak) ionization is mainly responsible for absorption of high-frequency radio waves. b) E-Region: The region between about 95 and 150km above the Earth that marks the height of the regular daytime E-layer. Other subdivisions, isolating separate layers of irregular occurrence within this region, are also labeled with an E prefix, such as the thick layer, E2, and a highly variable thin layer, Sporadic E. Ions in this region are mainly O2+. c) F-Region: The region above about 150km in which the important reflecting layer, F2, is found. Other layers in this region are also described using the prefix F, such as a temperate-latitude regular stratification, F1, and a low-latitude, semi-regular stratification, F1.5. Ions in the lower part of the F-layer are mainly NO+ and are predominantly O+ in the upper part. The F-layer is the region of primary interest to radio communications. d) Topside: This part of the Ionosphere starts at the height of the maximum density of the F2 layer of the Ionosphere and extends upward with decreasing density to a transition height where O+ ions become less numerous than H+ and He+. The transition height varies but seldom drops below 500km at night or 800km in the daytime, although it may lie as high as 1100km. Above the transition height, the weak ionization has little influence on radio signals. 2.4 Introduction To TEC The total electron content (TEC) is a measure of the total amount of electrons along a particular line of sight. Units of TEC are 1012 electrons per square centimeter. The dual frequency signals of GPS at an altitude of 20,200km allow the measurement of the total number of free electrons, along ray path from GPS satellite to receiver. This TEC, however usually includes instrumental biases inherent in the GPS receivers and transmitters. These biases must be removed to obtain absolute values of TEC. Several techniques to calculate absolute TEC using the Kalman filter have been proposed. Sardón et al. (1996) estimated absolute TEC assuming that vertical TEC distribution is spatially linear around the zenith of the receiver. Bishop et al. (1996) developed a self calibration of pseudorange errors technique which was validated by independent measurements (Bishop et al., 1997) and modeling (Lunt et al., 1999a). These techniques can be applied for data from a single GPS receiver. Mannucci et al. (1998) produced global maps of vertical TEC by interpolating TEC of more than 60 worldwide GPS Stations in order to study a global distribution of TEC under magnetically disturbed conditions. Ho et al. (1996), using such global TEC maps, found significant TEC increases in the winter hemisphere during a magnetic storm. 2.5 TEC in Malaysia 6 Originally, the concept of having a network of unstaffed, permanently configured GPS facilities that collect GPS data in an automatic manner has been evolving at the DSMM since 1996 (Abu & Mohamed, 1996). MASS is the latest venture of DSMM in providing 24 hours GPS data for GPS users in Malaysia. This network was completed two years later under the ‘Sea Level Monitoring Using GPS’ project. One of the primary objectives of the MASS is to act as the provider of GPS observation data and its related products (Abu & Mohamed, 1997; Abu et. al., 1998). The MASS data are made available to the public by DSMM either through the Internet or on request. The data are available in daily observation batches (i.e. from 0000 to 24 hours) and in compressed form to save disk space and transfer time. The ionosphere is a shell of electrons and electrically charged atoms and molecules that surrounds the earth, stretching from a height of about 50 km to more than 1000 km above the earth’s surface. The existence of the ionosphere is primarily due to the extreme ultraviolet radiation and X-rays from the sun. Each regions of the ionosphere are produced by varies kind of chemical species. TEC can be calculated as the integral of electron density along the signal path: TEC = ∫ Nds (1) Where N is electron density dan ds isinfinitesimal line element. Electron density is a function total sun radiation. In addition, TEC at a place depends on the local time, reaches maximum between 12:00 and 16:00. Unit for TEC measurement is 1016electron. Ionospheric effects can be stated in deflection index form. For a medium, n, deflection index can be defined as ratio speed of radiation transmitted in vacuum with speed of the same radiation in that medium. In vacuum, n = 1. For ionosphere, n can be obtained from function Applerton-Hartree (1) can be written as function F n2 = 1 – F(f, fp , fh , v, ) (2) where f is carrier phase frequency (Hz), fp is plasma frequency (Hz), fh is giro frequency for free electron (Hz), v is contact frequency (Hz) and is angle between signal and magnetic field vector. Equation (2) can be expanded in infinity series form. However, estimation from Equation (5) is made for the cases that its frequency is higher than 100 MHz. n = 1 – ½ (fp2/ f 2) (3) Due to plasma frequency at every point is fp2 = 80.5 N(Hz2), constants is in unit m3/s2 el and electron density is in unit el /m3, therefore, the equation of deflection index for carrier signal is n = 1 – 40.3 N/f 2 (4) Correlation between phase deflection index with group deflection index ng can be written as (6): ng = n + f(dn /df ) (5) Due to (dn /df ) = 40.3 N(2/f 3), we can obtain group deflection index ng as: 7 ng = 1 – (40.3 N/f 2 ) + f..2(40.3 N/f 3) = 1 + (40.3 N/f 2) (6) Distance between GPS receiver and satellite can be calculated by differential along the signal, we can obtain slant phase Δion = (-40.3/f 2) TEC (7) and phase delays in unit seconds is τɸ = (-40.3/cf 2) TEC (8) where speed of light, c = 2.997 x 108 m/s. Group delays is given as Δgion = (40.3/f 2) TEC (9) and group delays in unit nanosecond is τg = (40.3/cf 2) TEC (8) From the equation (9) and (10), a meter of slant ionosphere on signal L1 can be obtained. 2.6 Ionospheric Modelling There have been numerous researches on ionospheric modelling. These reseaches include: Empirical models based on extensive world wide data sets 3D, time dependent physical models Analytical model based on orthogonal function fits to the output obtained from numerical models Models driven by real-time ionospheric inputs. We adopted the empirical model as a standard ionospheric modelling. Analytical model and physical model are built based on physical teory or estimation on structure and changes of ionosperic layers itself. Empirical models is chosen for this research because it is based on ionospheric observations. There are three types of empirical model: a) Bent Model b) International Reference Ionospheric (IRI) c) Klobuchar Model Bent Model and IRI is classified as global model. Bent Model is applied to calculate profile electron density from height 0 to 1000 km. Input for this model is date, Universal Time, observers' location, solar flux and total sun spot. However, IRI model provides profile vertical electron, ion density and temperature. The local ionosphere might varies from global model. Klobuchar had designed a model from the Bent model. This model applied positive portion of radio waves cosine with a constant called DC to model the time delays at observer’s location. Tg = DC + A cos ( 2π(t – Tp) / P ) seconds (11) 8 Where DC is offset constant, A is amplitude, Tp is phase and P is parameter of model. Value of DC and Tp is record at 5ns and 50400s (14h) local time, amplitude and period is given as third order polynomial. A = ΣαiΦi P = ΣβiΦi (12) Where Φi is geomagnetic latitude for sub-ionosphere point, αi and βi (i=0,1,2,3) is constant that estimated by GPS Master Control Station from navigation information. TEC can be obtained straightly from different between pseudo range measurement L1 and L2 (11). From (11), slant for group delay is R2 – R1 = Δg2ion – Δg1ion + (εR2 – εR1) = TEC(α2 – α1) + εR21 (13) Ri, i=1,2 is measurement of pseudo range from L1 and L2. α1=(40.3/f2i), i=1,2 is constant (m3 per electron). Normally, we ignore the error εR21 and thus obtain the TEC. TEC = (R2 – R1) / (α2 – α1) = 9.5196 x 1016 (R2-R1) 3.0 (14) METHODOLOGY REVIEW The methods use in this study is shown in the chart flow below:Literature Review Software Learning Data Collection Extract Data from GPS Observations (Data in Format RINEX) Writing Algorithm Calculation Testing Previous and Latest Data Comparison Analysis and Conclusion 9 3.1 Programming Language MATLAB Modern computing tool like MATLAB which is a numeric computation and visualization program can make it possible to easily solve realistic nontrivial problems in scientific computing. In this study, traditionally, complicated problems were avoided, since the amount of work for obtaining the solutions was not feasible. This situation has changed now, the real-life problems can be solved by using this powerful software. MATLAB® is a high-performance language for technical computing. It integrates computation, visualization, and programming in an easy-to-use environment where problems and solutions are expressed in familiar mathematical notation. Typical uses include Math and computation Algorithm development Data acquisition Modeling, simulation, and prototyping Data analysis, exploration, and visualization Scientific and engineering graphics Application development, including graphical user interface building MATLAB is an interactive system whose basic data element is an array that does not require dimensioning. This allows you to solve many technical computing problems, especially those with matrix and vector formulations, in a fraction of the time it would take to write a program in a scalar non-interactive language such as C or Fortran. The name MATLAB stands for matrix laboratory. MATLAB was originally written to provide easy access to matrix software developed by the LINPACK and EISPACK projects. Today, MATLAB engines incorporate the LAPACK and BLAS libraries, embedding the state of the art in software for matrix computation. MATLAB has evolved over a period of years with input from many users. In university environments, it is the standard instructional tool for introductory and advanced courses in mathematics, engineering, and science. In industry, MATLAB is the tool of choice for highproductivity research, development, and analysis. MATLAB features a family of add-on application-specific solutions called toolboxes. Very important to most users of MATLAB, toolboxes allow you to learn and apply specialized technology. Toolboxes are comprehensive collections of MATLAB functions (M-files) that extend the MATLAB environment to solve particular classes of problems. Areas in which toolboxes are available include signal processing, control systems, neural networks, fuzzy logic, wavelets, simulation, and many others. The MATLAB system consists of five main parts: i. Development Environment. This is the set of tools and facilities that help you use MATLAB functions and files. Many of these tools are graphical user interfaces. It includes the MATLAB desktop and Command Window, a command history, an editor and debugger, and browsers for viewing help, the workspace, files, and the search path. ii. The MATLAB Mathematical Function Library. This is a vast collection of computational algorithms ranging from elementary functions, like sum, sine, cosine, and complex arithmetic, to more sophisticated functions like matrix inverse, matrix eigenvalues, Bessel functions, and fast Fourier transforms. iii. The MATLAB Language. This is a high-level matrix/array language with control flow statements, functions, data structures, input/output, and object-oriented programming features. It allows both "programming in the small" to rapidly create quick and dirty throw- 10 away programs, and "programming in the large" to create large and complex application programs. iv. Graphics. MATLAB has extensive facilities for displaying vectors and matrices as graphs, as well as annotating and printing these graphs. It includes high-level functions for twodimensional and three-dimensional data visualization, image processing, animation, and presentation graphics. It also includes low-level functions that allow you to fully customize the appearance of graphics as well as to build complete graphical user interfaces on your MATLAB applications. v. The MATLAB Application Program Interface (API). This is a library that allows you to write C and Fortran programs that interact with MATLAB. It includes facilities for calling routines from MATLAB (dynamic linking), calling MATLAB as a computational engine, and for reading and writing MAT-files. 3.2 Operation Of MASS Station for Data Collection Figure 4 The Operation of the Malaysian Active GPS System and the Processing Centre Figure 4 above shows the operation of the MASS network and the processing centre. Connected via telephone lines, all MASS stations are in direct link-up to the Kuala Lumpur Processing Centre (KLPC), situated at Geodesy Section of DSMM. All functions of the MASS stations such as receiver control, tracking schedules, data acquisition and uploading times are accomplished by the software residing in the PC. The system is also capable of alerting and engaging onsite personnel of any abnormal conditions occurring at each MASS station such as 11 power failure, system breakdown etc. The current designs of the MASS system allows external interrogation by the System Manager in Kuala Lumpur for status reports and if the need arises, override certain functions at any MASS station. The receivers have 24 channels, which are set to record GPS signals at a 15 seconds recording interval. The receivers are also equipped with either geodetic antennas with ground plane or choke ring antennas. To ensure that the system operates continuously, an uninterrupted power supply (UPS) will maintain power for at least three hours in the event of any power failure. The software is also designed to have an auto-start capability once the power is resumed. The stations track GPS data 24 hours a day continuously. The data are stored and archived at an hourly interval in the site computers. The GPS data at each MASS site, are then suitably compressed into an hourly batches before they are uploaded automatically twice daily to the central processing facility (KLPC) in Kuala Lumpur. The processing centre is situated at the DSMM headquarters. Its function is to monitor the 18 remote stations, to download the data on a daily basis and to provide all the information to users. At the KLPC, the GPS data are prepared in daily (24 hours) RINEX files, both for observations and broadcast navigation messages. The daily observation files from each MASS station contain the observations collected between 00:00:00 and 23:59:30 GPS time. The data editing and validation process is performed using a quality check program, UNAVCO’s QC program which was obtained from the IGS Central Bureau Information System. The GPS data are validated and edited for quality control by checking: o o o o 3.3 the header-file information (station name, receiver/antenna information, antenna height); the number of GPS observations; the number of observed satellites; and the date and times of first and last observation record. GPS RINEX Data The first proposal for the "Receiver Independent Exchange Format" RINEX has been developed by the Astronomical Institute of the University of Berne for the easy exchange of the GPS data to be collected during the large European GPS campaign EUREF 89, which involved more than 60 GPS receivers of 4 different manufacturers. The governing aspect during the development was the following fact: Most geodetic processing software for GPS data use a well-defined set of observables: - the carrier-phase measurement at one or both carriers (actually being a measurement on the beat frequency between the received carrier of the satellite signal and a receiver-generated reference frequency). - the pseudo range (code) measurement, equivalent to the difference of the time of reception (expressed in the time frame of the receiver) and the time of transmission (expressed in the time frame of the satellite) of a distinct satellite signal. - the observation time being the reading of the receiver clock at the instant of validity of the carrier-phase and/or the code measurements. 12 Usually the software assumes that the observation time is valid for both the phase and the code measurements, and for all satellites observed. Consequently all these programs do not need most of the information that is usually stored by the receivers: They need phase, code, and time in the above mentioned definitions, and some station-related information like station name, antenna height, etc. Currently the format consists of six ASCII file types: 1. Observation Data File 2. Navigation Message File 3. Meteorological Data File 4. GLONASS Navigation Message File 5. GEO Navigation Message File 6. Satellite and Receiver Clock Date File Each Observation file and each Meteorological Data file basically contain the data from one site and one session. RINEX Version 2 also allows to include observation data from more than one site subsequently occupied by a roving receiver in rapid static or kinematic applications. Although Version 2 allows to insert header records into the data field we do not recommend to concatenate data of more than one receiver (or antenna) into the same file, even if the data do not overlap in time. 4.0 CONCLUSION GPS Technology has been recognized widely in variety of field because it can provide more precise positioning. GPS observations are influenced by total electron content along the signal path from satellite to GPS receivers. Variation on TEC ionosphere can effect single frequency GPS receivers whereby compare with application of dual frequency GPS receivers can provide correction of Ionospheric Delay. From GPS observations, TEC can be modelled along the GPS signals path. This model will show function vertical TEC at sub-ionosphere point. This function is used to calculate the algorithm using MATLAB to estimate the TEC. Finally, we strongly believed that estimated TEC combined with other scientific data, it can be used for environmental studies such as continuous weather monitoring, climatology, communication signals and other geoscience application. 5.0 REFERENCES 1. Bishop, G., A. Mazzella, J. , E. Holland and S. Rao (1996). Algoritms that use the ionosphere to control GPS errors. IEEE Press 1996. Pp 145 – 152. 2. Bishop, G. J., D. S. Coco, N Lunt, C. Coker, A. J. Mazzella and L. Kersley (1997). Application of SCORE to extract protonspheric electron content from GPS/NNSS observations. ION GPS’97. Inst. Of Navig., Alexandria, Va. Pp 207 – 216. 3. Ho, C. M., A. J. Mannucci, U. J. Lindqwister, X. Pi and B. T. Tsurutani (1996). Global Ionosphere perturbations monitored by the worldwide GPS network. Geophys. Res. Let. Vol 23, pp 3219 - 3222. 4. Klobuchar, J. A. (1991). Ionospheric Effect On GPS. Global Positioning System: Theory and Applications. Parkinson & Spilker, Vol 1, American Institute of Aeronautics and Astronautics, Inc., pp 485 – 515. 13 5. Lao-Sheng Lin (1998). Real Time Estimation Of Ionospheric Delay Using GPS Measurements. Report Unisurv S-51, School of Geomatic Engineering. The University of New Saouth Wales, Sydney, Australia. 6. Lunt, N., L. Kersley, G.J. Bishop, A. J. Mazzella and G. J. Bailey (1999). Validation Using Model Simulations. The Effects of the Protonosphere on the Estimation of GPS Total Electron Content. Radio Sci.. Vol. 34, pp 1261 – 1271. 7. Md. Nor Kamarudin and Wan Abdul Aziz Wan Mohd Akib (1998). Pengesanan TEC Ionosphera Dengan Teknologi GPS. Jurnal Teknologi. Bil 28, pp 57 – 65. 8. Mannucci, A. J., B. D. Wilson, D. N. Yuan, C. H. Ho, U. J. Lindqwister and T. F. Runge (1998). A global mapping technique for GPS-derived ionospheric total electron content measurements. Radio Sci. Vol 33, pp 565 – 582. 9. Sardón, E., and N. Zarraoa (1997). Estimation of Total Electron Content using GPS data: How stable are the differential satellite and receiver instrumental biases?. Radion Sci. Vol 32, pp 1899 – 1910. 14