150 Probability Analysis
advertisement

Spatial Statistics (SGG 2413)
Probability Distribution
Assoc. Prof. Dr. Abdul Hamid b. Hj. Mar Iman
Former Director
Centre for Real Estate Studies
Faculty of Engineering and Geoinformation Science
Universiti Tekbnologi Malaysia
Skudai, Johor
SGG2413 - Theory of Probability
1
Learning Objectives
• Overall: To expose students to the concepts of
probability
• Specific: Students will be able to:
* define what are probability and random variables
* explain types of probability
* write the operational rules in probability
* understand and explain the concepts of
probability distribution
SGG2413 - Theory of Probability
2
Contents
•
•
•
•
Basic probability theory
Random variables
Addition and multiplication rules of probability
Discrete probability distribution: Binomial
probability distribution, Poisson probability
distribution
• Continuous probability distribution
• Normal distribution and standard normal
distribution
• Joint probability distribution
SGG2413 - Theory of Probability
3
Basic probability theory
• Probability theory examines the properties of
random variables, using the ideas of random
variables, probability & probability distributions.
• Statistical measurement theory (and practice)
uses probability theory to answer concrete
questions about accuracy limits, whether two
samples belong to the same population, etc.
• probability theory is central to statistical
analyses
SGG2413 - Theory of Probability
4
Basic probability theory
• Vital for understanding and predicting spatial patterns,
spatial processes and relationships between spatial
patterns
• Essential in inferential statistics: tests of hypotheses are
based on probabilities
• Essential in the deterministic and probabilistic processes
in geography: describe real world processes that produce
physical or cultural patterns on our landscape
SGG2413 - Theory of Probability
5
Basic probability theory (cont.)
• Deterministic process – an outcome that can be
predicted almost with 100% certainty.
• E.g. some physical processes: speed of comet fall,
travel time of a tornado, shuttle speed
• Probabilistic process – an outcome that cannot be
predicted with a 100% certainty
• Most geographic situations fall into this category
due to their complex nature
• E.g. floods, draught, tsunami, hurricane
• Both categories of process is based on random
variable concept
SGG2413 - Theory of Probability
6
Basic probability theory (cont.)
• Random probabilistic process – all outcomes of a process
have equal chance of occurring. E.g.
* Drawing a card from a deck, rolling a die, tossing
a coin
…maximum uncertainty
• Stochastic processes – the likelihood of a particular
outcome can be estimated. From totally random to totally
deterministic. E.g.
* Probability of floods hitting Johor: December vs. January
…probability is estimated based on knowledge which will
affect the outcome
SGG2413 - Theory of Probability
7
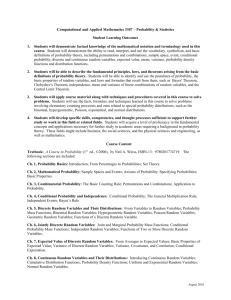
Random Variables
• Definition:
– A function of changeable and
measurable characteristic, X,
which assigns a real number
X(ζ) to each outcome ζ in the
sample space of a random
experiment
• Types of random variables:
– Continuous. E.g. income, age,
speed, distance, etc.
– Discrete. E.g. race, sex,
religion, etc.
S
SGG2413 - Theory of Probability
ζ
X(ζ) = x
x
Sx
8
Basic concepts of random variables
• Sample Point
– The outcome of a random experiment
• Sample Space, S
– The set of all possible outcomes
– Discrete or continuous
• Events
– A set of outcomes, thus a subset of S
– Certain, Impossible and Elementary
SGG2413 - Theory of Probability
9
Basic concepts of random variables (cont.)
• E.g. rolling a dice…
Space…S = {1, 2, 3, 4, 5, 6}
Event…Odd numbers: A = {1, 3, 5}
…Even numbers: B = {2,4,6}
Sample point…1, 2,..
• Let S be a sample space of an experiment with a
finite or countable number of outcomes.
• We assign p(s) to each outcome s.
• We require that two conditions be met:
0 p 1 for each s S.
sS p(s) = 1
SGG2413 - Theory of Probability
10
Basic concepts of random variables (cont.)
E.g. rolling a dice…
Outcome, x
Prob. x
Cumulative prob. X
1
1/6
1/6
=
0.166
2
1/6
2/6
=
0.333
3
1/6
3/6
=
0.500
4
1/6
4/6
=
0.666
5
1/6
5/6
=
0.833
6
1/6
6/6
=
1.000
SGG2413 - Theory of Probability
11
Types of Random Variables
• Continuous
– Probability Density
Function
Marginal change:
• Discrete
– Probability Mass
Function
No marginal change:
dFX x
fX x
dx
PX xk P X xk
Bounded area:
No bounded area:
FX x
x
f X t dt
FX x PX xk u x xk
k
SGG2413 - Theory of Probability
12
Types of Random Variables - continuous
fX(x)
fX(x)
dx
x
P x X x dx f X x dx
SGG2413 - Theory of Probability
13
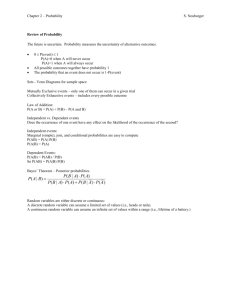
Probability: Law of Addition
If A and B are not mutually exclusive events:
P(A or B) = P(A) + P(B) – P(A and B)
E.g. What is the probability of types of coleoptera
found on plant A or plant B?
Plant A
P(A or B) = P(A) + P(B) – P(A and B)
Plant B
= 5/10 + 3/10 – 2/10
5
2
3
= 6/10
= 0.6
Types of plant coleoptera
SGG2413 - Theory of Probability
14
Probability: Law of Addition (cont.)
If A and B are mutually exclusive events:
P(A or B) = P(A) + P(B)
E.g. What is the probability of types of coleoptera
found on plant A or plant B?
Plant A
Plant B
P(A or B) = P(A) + P(B)
= 5/10 + 3/10
5
3
= 8/10
= 0.8
2
Types of plant coleoptera
SGG2413 - Theory of Probability
15
Probability: Law of Multiplication
If A and B are statistically dependent, the probability that A
and B occur together:
P(A and B) = P(A) P(B|A)
where P(B|A) is the probability of B conditioned on A.
If A and B are statistically independent:
P(B|A) = P(B) and then
P(A and B) = P(A) P(B)
SGG2413 - Theory of Probability
16
P(A|B)
Plant A
5
2
Plant A
Plant B
Plant B
5
3
3
2
Types of plant coleoptera
Types of plant coleoptera
A & B Statistically dependent: A & B Statistically independent:
P(A and B) = P(A) P(B|A)
= (5/10)(2/10)
= 0.5 x 0.2
= 0.1
P(A and B) = P(A) P(B)
= (5/10)(3/10)
= 0.5 x 0.3
= 0.15
SGG2413 - Theory of Probability
17
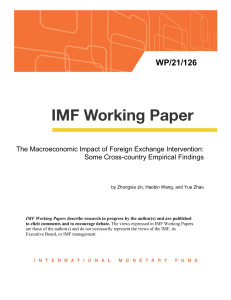
Discrete probability distribution
• Let’s define x = no. of bedroom of sampled houses
• Let’s x = {2, 3, 4, 5}
• Also, let’s probability of each outcome be:
nx
20
40
30
10
100
P(x)
0.2
0.4
0.3
0.1
1.0
0.45
Probability, p(x)
X
2
3
4
5
Total
0.40
0.35
0.30
0.25
0.20
0.15
0.10
0.05
0.00
2
SGG2413 - Theory of Probability
3
4
5
No. of bedroom, x
18
Expected Value and Variance
• The expected value
or mean of X is
E X tf X t dt
continuous
E X xk PX xk discrete
k
• Properties
• The variance of X is
2
Var X 2 E X E X
• The standard
deviation of X is
Std X Var X
• Properties
E c c
Var c 0
E cX cE X
Var cX c2Var X
E X c E X c
Var X c Var X
SGG2413 - Theory of Probability
19
More on Mean and Variance
• Physical Meaning
– If pmf is a set of point
masses, then the expected
value μ is the center of
mass, and the standard
deviation σ is a measure of
how far values of x are
likely to depart from μ
• Markov’s Inequality
P X a
EX
a
• Chebyshev’s Inequality
2
P X a 2
a
1
P X k 2
k
• Both provide crude upper
bounds for certain r.v.’s but
might be useful when little
is known for the r.v.
SGG2413 - Theory of Probability
20
Discrete probability distribution – Maduria magniplaga
Tree
No. of fruit
landings
(Xi)
No. of
fruits with
borers
attack
(fXi)
Prob. of fruit
landings
Expected no.
fruits with
borers
(pXi = fXi/Xi)
(fXi x pXi)
(fXi –mean)2
(fXi –mean)2
x pXi
1
20
8
0.13
1.05
1.42
0.18
2
10
6
0.07
0.39
0.66
0.04
3
15
4
0.10
0.39
7.90
0.77
4
14
6
0.09
0.55
0.66
0.06
5
24
8
0.16
1.25
1.42
0.22
6
20
12
0.13
1.57
26.93
3.52
7
18
9
0.12
1.06
4.79
0.56
8
10
4
0.07
0.26
7.90
0.52
9
14
2
0.09
0.18
23.14
2.12
10
8
2
0.05
0.10
23.14
1.21
Sum
153
61
1.00
Mean
6.81
Variance
9.21
Std. dev.
3.04
SGG2413 - Theory of Probability
21
Discrete probability distribution – Maduria magniplaga
• Expected no. of fruits with borers:
E(Xi) = X.px
= (fXi.Xi/Xi)
= 6.81
≈7
• Variance of fruit borers’ attack:
2 = E[(X-E(X))2]
= (fni – mean)2 x pXi
= 9.21
●
Standard deviation
of fruit borers’ attack:
= 9.21
= 3.04
SGG2413 - Theory of Probability
22
Discrete probability distribution: Binomial
• Outcomes come from fixed n random
occurrences, X
• Occurrences are independent of each other
• Has only two outcomes, e.g. ‘success’ or
• ‘failure’
• The probability of "success" p is the same for
each occurrence
• X has a binomial distribution with parameters
n and p, abbreviated X ~ B(n, p).
SGG2413 - Theory of Probability
23
Discrete probability distribution: Binomial (cont.)
The probability that a random variable X ~ B(n, p) is
equal to the value k, where k = 0, 1,…, n is given by
where
Mean and variance:
SGG2413 - Theory of Probability
24
Discrete probability distribution: Binomial (cont.)
• E.g. The Road Safety Department
discovered that the number of potential
accidents at a road stretch was 18, of which
4 are fatal accidents. Calculate the mean
and variance of the non-fatal accidents.
• = np = 18 x 0.78 = 14
• 2 = np(1-p) = 14 x (1-0.78) = 3.08
SGG2413 - Theory of Probability
25
Cumulative Distribution Function
• Defined as the probability of the event {X≤x}
• Properties
Fx(x)
FX x P X x
1
x
0 FX x 1
Fx(x)
lim FX x 1
1
x
¾
lim FX x 0
x
if a b then FX a FX a
P a X b FX b FX a
½
¼
0
1
2
3
x
P X x 1 FX x
SGG2413 - Theory of Probability
26
Probability Density Function
dF x
• The pdf is computed from f X x X
dx
• Properties
P a X b f X x dx
b
a
FX x
x
fX(x)
f X t dt
1
f X t dt
fX(x)
dx
• For discrete r.v
f X x PX xk x xk
x
P x X x dx f X x dx
k
SGG2413 - Theory of Probability
27
Conditional Distribution
• The conditional
distribution function of X
given the event B
P X x B
FX x | B
P B
• The conditional
dFX x |pdf
B is
fX x | B
• The distribution function
can be written as a
weighted sum of
conditional distribution
functions n
FX x | B FX x | Ai P Ai
i 1
dx
where Ai mutally
exclusive and
exhaustive events
SGG2413 - Theory of Probability
28
Joint Distributions
• Joint Probability Mass
Function of X, Y
p XY x j , yk P X x j Y y j
P X x j , Y yk
• Probability of event A
• Joint CMF of X, Y
FXY x1 , y1 P X x1 , Y y1
• Marginal CMFs
FX x FXY x, P X x
FY y FXY , y P Y y
PXY X , Y A pXY x j , yk
jA kA
• Marginal PMFs (events
involving each rv in
isolation)
p XY x j P X x j p XY x j , yk
k 1
SGG2413 - Theory of Probability
29
Conditional Probability and
Expectation
• The conditional CDF of Y
given the event {X=x} is
FY
y | x
y
f XY x, y ' dy '
fX x
• The conditional expectation
of Y given X=x is
E Y | x yfY y | x dy
• The conditional PDF of Y
given the event {X=x} is
fY Y | x
f XY x, y
fX x
f X x | y fY y
fY y | x
fX x
SGG2413 - Theory of Probability
30
Independence of two Random
Variables
• X and Y are independent if
{X ≤ x} and {Y ≤ y} are
independent for every
combination of x, y
• Conditional Probability of
independent R.V.s
f XY x, y f X x fY y
FXY x, y FX x FY y
fY y | x fY y
f XY x, y f X x fY y
f X x | y f X x
SGG2413 - Theory of Probability
31
Thank you
SGG2413 - Theory of Probability
32