DESIGN AND CONSTRUCTION OF AN INTERROGATION UNIT FOR FIBER
advertisement

DESIGN AND CONSTRUCTION OF AN INTERROGATION UNIT FOR FIBER
BRAGG GRATING SENSOR SYSTEM
MOHD ASMU’I BIN MOHD AKIL
A thesis submitted in fulfilment of the
requirements for the award of the degree of
Master of Science (Physics)
Faculty of Science
Universiti Teknologi Malaysia
OCTOBER 2009
iii
To my beloved father, mother, families and friends for their timely support during
the preparation of this thesis.
iv
ACKNOWLEDGEMENT
I would like to express my thanks to all my supervisors; Assoc. Prof. Dr.
Rashdi Shah Ahmad and Prof. Dr. Rosly Abdul Rahman for being very resourceful,
inspiring, supporting and understanding during my study. I like to thanks all the staff
from Physics Department (UTM) and Advanced Photonics Science Institute (UTM)
especially En Nasir Bakar, En Ahmad Imbar and En Subri Ishak. Their technical
support to my thesis’s project is priceless and I appreciate it very much.
Also, I would like to acknowledge my friend En Yap Yung Szen, En Sakifli
and En Aizi Mat Salim for their help in term of idea, my research progress and for
the moral support.
Lastly, I want to thank to all that have help me without hesitation. Thank you
once again.
v
ABSTRACT
Fiber optic sensors are commonly used nowadays in civil structure and
medical applications as well as in research. This is due to the ability of fiber optic
sensors exceeding the ability of other sensors in terms of sensitivity, precision and
the ability to be multiplexed in a large network of sensors such as for a large area
landslide monitoring. One popular applications of fiber optic technology is the use of
in core Fiber Bragg grating (FBG). FBG sensors are very sensitive to parameters such
as strain and temperature. Unfortunately the high sensitivity demanded interrogation
system that has the same resolution capability. This thesis mainly discusses on the
development of an interrogation system for FBG using a wavelength filter method.
The works also cover a simulation coding program using Matlab® that has been
developed for a tunable filter around 1310 nm to studies the characteristics of a Fabry
Perot (FP) filter. The complete interrogation system based on wavelength filter
method is developed using other optical components including broadband source,
coupler, wavelength filter and photodetector. The photodetector and wavelength filter
are interface to a personal computer (PC) for the purpose of tuning at a certain
wavelength and photodetector collecting the optical power. By scanning the whole
spectrum and collecting the power of each individual wavelength, λ; the λBragg from
the sensor can be identified. This is achieved by using an RS-232 interface protocol
and a software utilizing Microsoft Visual Basic 6.0. The design software governs the
whole process of controlling the wavelength filter and the collection of power from
photodetector. The Bragg wavelength, λBragg, is easily known via an algorithm
developed by comparison method. This setup can be used in any sensing system
based on FBG such as temperature and strain monitoring with the resolution of
0.1nm. This system gives a Bragg wavelength, λBragg with a standard deviation of
1.2% compare to the OSA value. Finally the system was tested using FBG with a
given strain. The result produced indicated a linear trendline which is similar to that
obtained on OSA with a linear regression of 99.77%.
vi
ABSTRAK
Penderia Gentian Optik banyak digunakan pada masa kini dalam aplikasi
struktur awam dan perubatan serta penyelidikan. Ini kerana kebolehan yang ada pada
penderia gentian optik yang melebihi penderia-penderia lain seperti kepekaan,
kepersisan dan kebolehannya untuk mengambungkan penderia dalam satu rangkaian
penderia yang besar seperti mengawas kawasan berpotensi tanah runtuh yang luas.
Satu penggunaan terkenal teknologi gentian optik adalah dengan menggunakan
gentian parutan Bragg. Gentian parutan Bragg ini sangat sensitif terhadap parameter
suhu dan tegangan. Malangnya kepekaan yang tinggi memerlukan sistem pengujian
panjang gelombang yang selaras dengan resolusinya. Tesis ini membincangkan
tentang pembangunan sistem pengujian untuk Penderia Gentian Optik ini dengan
menggunakan kaedah talaan tapis panjang gelombang. Ia juga meliputi pembangunan
kod simulasi menggunakan Matlab® untuk penapis talaan 1310 nm untuk mengkaji
ciri-ciri penapis Fabry Perot (FP). Sistem pengujian ini dibina menggunakan sumber
cahaya jalurlebar, penganding, penapis talaan panjang gelombang dan pengesan foto.
Pengesan foto dan penapis talaan panjang gelombang di antaramuka pada komputer
peribadi (PC) untuk tujuan menala panjang gelombang yang sesuai semasa penapisan
dilakukan dan pengesan foto mengambil nilai kuasa pada gelombang yang ditala.
Dengan mengimbas keseluruhan spektrum dan mengambil nilai kuasa untuk setiap
panjang gelombang λ; the λBragg dari penderia boleh dikenal pasti. Ini dicapai dengan
menggunakan protokol antaramuka RS-232 dan perisian yang dibina dengan
menggunakan Visual Basic 6.0. Perisian yang direka ini mentadbir urus keseluruhan
proses mengawal panjang gelombang yang ditapis dan pengumpulan kuasa dari
pengesan foto. Panjang gelombang, λBragg, mudah diketahui melalui algoritma yang
dibina menggunakan kaedah perbandingan. Keseluruhan susun atur boleh digunakan
untuk mengesan sistem berdasarkan FBG seperti mengawas suhu dan tegasan dengan
resolusi 0.1nm. Sistem ini memberikan panjang gelombang λBragg dengan sisihan
piawai 1.2% dibandingkan dengan OSA. Akhirnya sistem ini diuji dengan FBG yang
dikenakan tegasan. Hasilnya adalah hubungan seperti diberikan oleh OSA dengan
kelinearan 99.77%.
vii
TABLE OF CONTENTS
CHAPTER
1
2
TITLE
PAGE
DECLARATION
ii
DEDICATION
iii
ACKNOWLEDGEMENT
iv
ABSTRACT
v
ABSTRAK
vi
TABLE OF CONTENTS
vii
LIST OF TABLES
x
LIST OF FIGURES
xi
LIST OF SYMBOLS
xiv
LIST OF APPENDICES
xvi
INTRODUCTION
1.1
General Introduction to FBG Technology
1
1.2
Measurement of Wavelength
4
1.3
Background of Problem
5
1.4
Statement of Problem
6
1.5
Scope of study
6
1.6
Statements of hypotheses
7
1.7
Objectives of the study
7
1.8
Thesis plan
7
LITERATURE REVIEW
2.1
Introduction
9
viii
2.1.1
Passive Wavelength Demodulation System
9
2.1.2
Long Period Grating
11
2.1.3
Acousto-optic Tuneable Filter
12
2.1.4
Active Wavelength Demodulation Using Acousto-optic
Tunable Filter
16
2.1.5
Wavelength Division Coupler
18
2.1.6
Highly Overcoupled Couplers
20
2.1.7
Biconical Fiber Filter
21
2.1.8
Matched-filter Interrogation
23
2.1.9
Interrogation of Wavelength Division Multiplexed FBG
26
Using Arrayed Waveguide Grating
3
2.2
Fiber Bragg Gratings
28
2.2.1
Theory of Fiber Bragg Gratings
29
2.2.1.1 Mode Theory for Optical Fibers
30
2.2.1.2 Coupler Mode Theory
35
2.2.2
Transfer Matrix Method
40
2.3
Fabry Perot Concept
43
2.3.1
Historical Background
43
2.3.2
Mathematical Model For The Fabry Perot Filter
45
2.3.3
Figures Of Merit
46
2.4
Motor Driven Tunable Filter
51
METHODOLOGY
3.1
Introduction
53
3.2
Detection Concept
55
3.3
Complete FBG Interrogation System
57
3.4
FBG Calibration
59
3.5
Calibration Interrogation System
60
3.5.1
Motor Driven Tunable Filter
60
3.5.2
Photodetector
65
3.6
Interfacing
69
3.6.1
Hardware
71
ix
3.6.2
4
5
Data Acquisition and Logic
73
RESULTS AND DISCUSSIONS
4.1
Introduction
76
4.2
Calibration of Broadband Source and Photodetector
76
4.3
Calibration of Motor Driven Tunable Filter
87
4.4
Evaluation of The System
91
4.5
Simulation of Fabry perot FBG
97
4.6
Experimental of Fabry Perot FBG
101
CONCLUSIONS
5.1
Summary of findings
106
5.2
Suggestions and Recommendations
107
REFERENCES
108
Appendices A-D
115-130
x
LIST OF TABLES
TABLE NO.
TITLE
PAGE
3.1
Optical Specifications For Motor Tunable Filter
61
3.2
RS-232 Settings
62
3.3
Importants Command Used To Control Motor Tunable Filter
63
3.4
Optical Specifications For Motor Tunable Filter
64
3.5
Optical Specifications For Motor Tunable Filter
64
3.6
Photodetector Gain
66
4.1
Important Mark in Spectrum
79
4.2
Value a and b of Lorentzian Equation To Fit Spectrum Data
80
4.3
Total Power
83
4.4
Toggle Position of Source versus Output of InGaAs Detector
85
4.5
Voltage Output from InGaAs Detector
85
4.6
Wavelength Different Between The Wavelength Tuned by Motor
Tunable Filter and Wavelength Detected by OSA
88
4.7
Results of Bragg wavelength from OSA and MTF
95
4.8
Applied Strain To The Bragg Wavelength
97
4.9
Comparison of six Fabry Perot Fiber Bragg Gratings (FP-FBGs) with
4.10
different separation between gratings
101
The Characterization of Fabrication of Fabry Perot FBG
104
xi
LIST OF FIGURES
FIGURE NO.
1.1
TITLE
PAGE
A schematic representation of a Bragg grating
2
inscribed in the core of an optical fiber
1.2
Diffraction of a light wave by a grating
2
2.1
Schematic of passive wavelength demodulation system
10
2.2
Experimental set-up for fiber grating sensor interrogation.
12
The dotted boxes outline the modulation system employed in
the resolution improvement experiment
2.3
Schematic diagram using acousto-optic tuneable filter
13
2.4
Experimental arrangement using AOTF
16
2.5
Experimental setup for demonstration of edge-locking AOTF
17
based AWDS for broadband light interrogated Bragg grating sensor
2.6
Diagram of strain sensor configuration using a fiber Bragg
20
grating and wavelength division coupler
2.7
Experimental setup for Bragg wavelength detection using HOCC 21
2.8
Schematic diagram of demodulation scheme
22
2.9
Matched-filter interrogation of FBG sensors
24
2.10
Experimental setup wavelength division multiplexed FBG using
27
arrayed waveguide grating
2.11
Schematic diagram of step-index fiber with cylindrical coordinates 30
2.12
Graphs of Bessel functions of the first kind for v = 0, 1, 2, 3
32
2.13
Graphs of the eigenvalue equation of step-index fiber
34
2.14
Reflection spectral response versus normalized wavelength for
39
uniform Bragg gratings witk κL=2 and κL=10
2.15
Illustration of grating simulation using the transfer matrix method 42
2.16
Illustration of operation of the two planar-mirror Fabry Perot filter 45
xii
2.17
Transmission of the Fabry Perot filter as a function of frequency.
47
Adjacent fringes are equally spaced in frequency
2.18
Transmission of the Fabry Perot filter indicating free spectral range 48
and bandwidth resolution as functions of resonance frequency
2.19
Variation of transmission intensity of the Fabry Perot filter for
50
different values of finesse
2.20
Motor Driven Tunable Filter Operation
52
2.21
Motor Driven Tunable Filter Spectrum
52
3.1
FBG Strain/Temperature Characteristics
54
3.2
(a)Transmission spectrum of FBG; (b)Reflection spectrum of FBG 54
3.3
Lambda Bragg by TFBG looking to the transmission TFBG
55
3.4
Lambda Bragg by TFBG looking to the reflection TFBG
56
3.5
Complete interrogation unit system
57
3.6
Unit Using Tunable Laser Source As a Wavelength Varies
58
3.7
Interrogation by Broadband Source And Motor Tunable Filter
59
3.8
Detecting Unit Using Broadband Source
60
3.9
Calibration of Motor Tunable Filter
61
3.10
PDA400 Responsivity
66
3.11
Calibration Photodetector
66
3.12
Broadband Source Dial Button
68
3.13
Setup for Spectrum Calibration
68
3.14
Optical Spectrum of Broadband Source
68
3.15
Setup for Photodetector Calibration
68
3.16
Serial Port Analog To Digital Interface Circuit
70
3.17
INA114 Precision Instrumentation Amplifier
71
3.18
Programming Flow Chart to Detect Maximum Amplitude
74
3.19
Software FBG Visulation System
75
4.1
Spectrum power of each dial Position; (a) to (i)
78
4.2
Power spectrum at each nine positions
82
4.3
Spectrum for nine dialled positions
84
4.4
Comparison between graph (a) and (b)
86
4.5
Integration Power versus V2
87
4.6
Spectrum of Broadband Source Imposed with Spectrum
88
xiii
Filtered by Motor Driven Tunable Filter
4.7
Relationship of the Wavelength OSA and Wavelength MTF
89
4.8
Wavelength Different of Each Wavelength Tested
90
4.9
Experimental Setup for FBG Interrogation System
91
4.10
The interrogation system software
91
4.11
Spectrum of nine FBG tested using OSA and MTF; (a) to (i)
95
4.12
Comparison lambda Bragg (MTF) with lambda Bragg (OSA)
96
4.13
Setup of interrogation system used to interrogate the applied
96
Strain FBG sensor
4.14
The Bragg wavelength change due to applied strain
97
4.15
Construction of the Dual Fiber Bragg Gratings as a Fabry
98
Perot Resonator
4.16
Figure shows here (a) reflection spectrum, (b) – (j) transmission 100
spectrum of a FP FBGs with a separation length 0.5cm, 1.0cm,
1.5cm, 2.0cm, 2.5cm, 3.0cm, 3.5cm, 4.0cm and 4.5cm
4.17
Spectrum of Fabricated Fabry Perot FBG
103
xiv
LIST OF SYMBOLS
λBragg
-
Bragg wavelength
IMG
-
Index Matching Gel
µε
-
microstrain
TLS
-
Tunable Laser Source
FBG
-
Fiber Bragg Grating
FPFBG
-
Fabry Perot Fiber Bragg Grating
λ
-
Wavelength
AOTF
-
Acousto-optic tunable filter
BFF
-
Biconical fibre filter
BWDM
-
Bandpass wavelength-division multiplexing
CCD
-
Charge coupled device
CFBG
-
Chirped fibre Bragg grating
DOE
-
Diffractive optical element
DWDM
-
Dense wavelength-division multiplexing
ECL
-
External cavity diode laser
EDF
-
Erbium-doped fibre
EDFA
-
Erbium doped fibre amplifier
FFP
-
Fibre Fabry-Perot
FFTS
-
Fibre fourier transform spectroscopy
FSK
-
Frequency shift keying
FSR
-
Free spectral range
FTS
-
Fourier transform spectroscopy
FWHM
-
Full width half maximum
GRIN
-
Graded Index
HOCC
-
Highly over-coupled couplers
IC
-
Integrated circuit
LED
-
Light emiting diode
xv
LPG
-
Long period grating
MLM
-
Mode-lock modulator
MZI
-
Mach-Zehnder interferometer
OPD
-
Optical path difference
OSA
-
Optical spectrum analyzer
PC
-
Personal computer
PZT
-
Piezo-electric transducer
RF
-
Radio frequency
SFBG
-
Superstructure fibre Bragg grating
SLD
-
Super-luminescient diode
SMF
-
Single mode fibre
UV
-
Ultra violet
VCO
-
Voltage controlled oscillator
WDM
-
Wavelength-division multiplexing
WS
-
Wavelength scanner
∆T
-
temperature change
∆F
-
applied force
ε
-
strain
σ
-
stress
n
-
refractive index
d
-
spacial period
Λ
-
grating pitch
neff
-
effective index of refraction
∆ε
-
strain applied
ρα
-
photo-elastic coefficient
ρ11, ρ12
-
components of the fibre optic strain tensor
υ
-
Poisson’s ratio
∆L
-
space between Bragg grating elements
F1, F2
-
pulse train frequencies
G1S
-
sensor grating
G1R
-
receiver grating
P, P1, P2
-
optical power
∆Ψ
-
interferometer phase change
xvi
LIST OF APPENDICES
APPENDIX
TITLE
PAGE
A
Datasheet Photodetector
115
B
Datasheet Motor Tunable Filter
116
C
Matlab Simulation Code
118
D
Calibration Motor Tunable Filter
120
E
Data Interrogation System
122
F
Result Interrogation Nine FBG
124
CHAPTER 1
INTRODUCTION
1.1
General Introduction to FBG Technology
The research and development of precise measurement using optical sensor
technology gives birth to a Fiber Bragg Grating (FBG) in 1978 (Hill K. O. et. al., 1993).
It was discover by Ken Hill and colleagues at Canada’s Communications Research
Center (CRC; Ottawa, Canada) when they studying for a nonlinear effects in germanium
doped silica fiber.
Basically, a fiber Bragg grating are simple intrinsic devices which can be ‘photoimprinted’ into fiber optic and represent one of the most exciting developments in the
area of fiber optic sensing in recent years. It is a simple device consists of a periodic
modulation of the index of refraction along the core fiber and couples light in and out of
fiber and performs many functions such as reflection, diffraction, filtering (spatial,
polarization, etc.) in a highly efficient, low loss manner. FBG are set to revolutionize
telecommunications and also have a critical impact on the optical fiber sensor field.
Figure 1.1 below show the fiber Bragg grating in the core of fiber optic.
2
Broadband
Spectrum
λ=λ1+λ2
Fiber Bragg Grating
Reflection Spectrum,
λ2=λBragg
Transmission
Spectrum, λ1
Λ
Figure 1.1: A schematic representation of a Bragg grating inscribed in the core of an
optical fiber
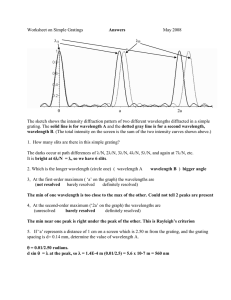
The working principle of a fiber Bragg grating is it an optical diffraction grating
with a light wave incident on the grating at an angle of θ1, can be described by the
grating equation given by Hecht (2002) as
n sin θ2 =n sinθ1 +m(λ/Λ)
(1.1)
Where θ2 the angle of the diffracted wave, n is the refractive index of the media,
λ is the incident wavelength, Λ is the spatial period of the grating, and the integer m
determines in the diffraction order as shown in Figure 1.2 (Van L.L. 2003). This
equation predicts the direction for which constructive interference occurs and is used for
determining the wavelength at which a grating most efficiently coupled light between
two modes.
Figure 1.2: Diffraction of a light wave by a grating
3
For a conventional fiber Bragg grating, the periodicity of the index modulation
has a physical spacing that is one half of the wavelength of light propagating in the
waveguide (it is phase matching between the grating planes and incident light that
results in coherent back reflection) (Othonos A. and Kalli K., 1999).
Reflectivity’s approaching 100% are possible, with the grating bandwidth
tailored from typically 0.1 nm to in excess of tens of nanometers. These characteristics
make Bragg gratings suitable for telecommunication where they are used to reflect, filter
or disperse light. Fiber lasers capable of producing light at telecommunications windows
utilize Bragg gratings in forming both the high-reflectivity end mirror and output
coupler to the laser cavity, realizing an efficient and inherently stable source (Grattan
K.T.V. and Meggitt B.T., 2000).
On top of that, the advantage of using the Fiber Bragg grating (FBG) sensors
have received significant interest in recent years because they have a number of
distinguishing advantages compared with other implementations of fiber-optic sensors
(Rao Y. J. et. al., 1995). The main advantage is the two characteristics of Bragg gratings
written in Ge-doped silica fibers make them particularly attractive for sensing
applications. First, the gratings are intrinsic; thus they may be inserted in small or
complex structures with minimal disturbance of the structure. Second, the measurand
causes a wavelength shift of the light reflected by the grating. Since the sensed signal is
naturally wavelength-encoded, the sensed information is independent of source power
fluctuations and losses in the connecting fibers and couplers (Weis R. S., 1994). Other
advantages are:
i.
They give an absolute measurement insensitive to any fluctuations in the
irradiance of the illuminating source, as the information is obtained by detecting
the wavelength shift induced by the measurand (Morey W. W. et. al., 1991).
ii.
They can be written into the fiber without changing the fiber diameter, making
them compatible with a wide range of situations where small diameter probes are
essential, such as in advanced composite materials, human bodies etc.
4
iii.
They can be mass-produced with good repeatability, making them competitive
with conventional electrical sensors (Askins C. C. et. al., 1994).
iv.
Many gratings of FBG can be serially arranged along a fiber to create a quasidistributed sensor array. These distributed and multiplexed fiber-grating-based
sensing schemes have been proposed in many ways that have been intensively
investigated for use with fiber-optic sensors, such as wavelength-division
multiplexing (WDM), frequency-division multiplexing (FDM), time-division
multiplexing (TDM), and their combinations (Kersey A. D. et. al., 1994), making
quasi-distributed sensing practically feasible. These systems are illuminated
using a spectrally broad-band source and each grating reflects a narrow-band
portion of the incident light spectrum. A measurand-induced change of an
individual grating’s period changes the narrowband wavelength reflected by that
grating. The wavelength shift of the grating-reflected light is detected at the
output. (Weis R. S., 1994)
1.2
Measurement of Wavelength Shift
The detection of this ‘wavelength shift’ has been the subject of considerable
research and several techniques have been developed. Two techniques that using filter as
their main components to detect the ‘wavelength shift’ are using bulk optic filters
whose fractional power transmitted are linear functions of wavelength (over the
wavelength range of interest) (Melle S. M. et. al., 1992), and the other with a fused
biconical coupler (Davis M. A. et. al., 1994). Another techniques uses matched
receiving-sensing grating pairs where the receiving grating tracks the wavelength shift of
the sensing grating (Jackson D. A. et. al. 1993). A similar scheme uses a fiber MachZehnder interferometer and an isolated reference grating (Kersey A. D., 1993). Others
use fiber laser cavities whose lasing wavelengths are dependent on the Bragg grating
(Alavie A. T. et. al., 1993). Fiber Fabry-Perot (FFP) and fiber Mach-Zehnder (MZ)
interferometers have also been used to detect the wavelength shifts. In the FFP scheme,
the FFP acts as a tunable narrowband wavelength filter (Kersey A. D., 1993). In the MZ
5
scheme, the MZ converts the wavelength shift of the grating reflected light to a phase
shift and then detects that phase shift. (Weis R. S., 1994)
1.3
Background of Problem
The primary drawback of the interrogation system for FBG sensor lies in the
detection of wavelength shift ∆λ of the FBG sensor return. This function can be
provided by a conventional spectrometer or monochromator, or by a more simple
arrangement involving a dispersive element coupled with an image array, such as a CCD
detector array. The problem is the system are unapplicable due to bulk-optical nature,
size, lack of ruggedness and limited resolution capability (A. D. Kersey, 1992), (Rao Y.
J. et. al., 1995).
In order for these gratings to be used in a practical sensor system, the
determination of the peak wavelength of the narrow-band spectrum, on the order of
angstroms, reflected from such a grating is of particular importance (Melle S. M. et. al.,
1992).
However, the cost of the optical interrogation system remains high. This points
of a future where the cost of a complete system is dictated by the interrogation method
rather than by the gratings themselves. The majority of Bragg gratings are interrogated
in one of two ways. (Fallon R W, 1998):
(a) By a tunable filter such a Fabry–Perot. These systems are moderately expensive,
good for measuring static and quasi-static measurands with a resolution of about 10 µε
and are particularly suitable for wavelength multiplexing.
(b) By an interferometer such as an imbalanced Mach–Zender. These are expensive,
complex and require a considerable amount of equipment and set-up time. Although
they are ideal for measuring exceptionally small dynamic and quasi-static strain, their
environmental related instability remains a difficult problem.
6
1.4
Statement of Problem
A key issue with FBG sensors is it needs a high-resolution device for the
detection of wavelength shift (or Bragg wavelength, λB) that had a bandwidth
~0.1
nm (Rao Y. J. et. al., 1996). In the lab, usually the Optical Spectrum Analyzer (OSA)
was used to detect the wavelength shift. Although OSA has a capability of scanning to a
wide range spectrum and can achieve high-resolution wavelength detection, but it is not
applicable to be used with the FBG sensor on the field work. This is because the OSA is
not rugged, fragile, not robust device for sensing environment, bulky in term of size and
portable. Also the OSA are scanning the power in the wavelength range, so the
wavelength shift is manually determine according to FBG sensor setup either the
reflection or the transmission power. This is a disadvantage of time consuming to detect
the wavelength range.
1.5
Scope of study
The highlight of the research was the development of an interrogation unit for
FBG sensor with the center wavelength of 1300nm. The work flow of this research
includes:
i.
Design and construct setup for FBG detection unit of wavelength 1290
nm (1270 nm – 1310 nm) using optical and electronic circuit
-
Optical - using Motor-Driven Tunable filter and Photodetector as an
optical scanner
-
Electronic – build interface card Serial Port from ADC/DAC
ADS1212 to control Motor-Driven Tunable Filter and capture data
from Photodetector using computer
ii.
Software development using Visual BasicI® for data acquisition and
finding wavelength shift
iii.
Evaluate the system performance by testing with the strain FBG sensor to
finds the equipment sensitivity, responsitivity, and accuracy compare to
OSA.
7
1.6
Statements of hypotheses
The hypotheses made are as follows;
1. the wavelength shift can be detected or defined by interrogation unit
detecting using two methods: detect the peak of highest power in the
transmission spectrum of fiber Bragg grating (FBG) and the peak of lowest
power in reflection spectrum of FBG
2. Besides using a fiber Bragg grating (FBG) as a fiber optic sensor,
theoretically it also has a capability as a high resolution interrogation unit.
3. an improvement of interrogation unit based on Fabry Perot (FP) system by
using dual FBG to make Fabry Perot FBG (FPFBG)
1.7
Objectives of the study
The objectives of this study are;
1. To design and construct a portable high-resolution an interrogation unit for
Fiber Bragg Grating sensor,
2. To unsure the interrogation unit should be low-cost, simple system and
directly give the Bragg wavelength value without needing to analyze or show
the whole spectrum,
3. To determine the optimum parameter of Fabry Perot Fiber Bragg Grating in
terms of length of resonator, free spectral range, minimum resolvable
bandwidth, finesse and contrast factor to achieve tunable filter replacing
Motor-Driven Tunable Filter for interrogation unit,
4. To test the interrogation unit to a complete sensor system.
1.8
Thesis plan
This thesis comprises five chapters. In the introduction discuss the important of
a FBG sensor as a state of the art technology convenience to many applications such as
8
civil monitoring, telecommunication and also surveillance. This chapter also give an
inside problem to the FBG that show the important of this study to make FBG sensing
system are feasible to real life application.
The second chapter deals with the literature review on the previous studies done
by research all over the world in the interrogation unit field. It highlights the most
important system and setup cover up from 1992 until 2007 such as by using highly
overcoupled couplers, mode-locked interrogation, biconical fiber filter, bandpass
wavelength multiplexing, pseudoheterodyne demodulation technique, acousto-optic
tunable filter and others more method describe detailly in this chapter. Also, this chapter
discusson the detailed theory of FBG including the mathematical model to describe the
physical meaning inside the grating and the method to simulate or design of a FBG. The
focuses of this chapter also include the background theory of this whole research work
on how the FBG itself can be used to develop and constructed the effective interrogation
unit. Consolidation to the used of a Fabry Perot phenomenon as an added advantage to
increase the performance of FBG interrogation is also distinct.
The third chapter states the experimental and measurement techniques which
includes research design and the apparatus used for both optical and electrically. The
parameters and physical measurements are defined.
The fourth chapter deals with analysis of the system performance. The
characteristics of FBG as a main medium for interrogation unit are clarify both
experimentally. Because of a fabrication limitation, the Fabry Perot fiber Bragg grating
(FPFBG) only analyses using mathematical modelling and simulation only. In the end of
this chapter, the results of a demonstration interrogation unit in practical application are
presented.
The final chapter summarize the findings and comments on the interrogation unit
based on FBG in relation to wavelength resolution and effectiveness. Recommendations
for further work are also mentioned.
CHAPTER 2
LITERATURE REVIEW
2.1
Introduction
Basically an interrogation is an interpreter of a signal to represented it to an
understandable format. In this study an interrogation unit is a system that convert optical
signal to readable data. The system include passive optical device such as coupler,
wavelength division multiplexing, attenuator, isolator, photodetector and also include
electronics device such as analog to digital converter, amplifier, filter, interface chip.
The development progressed of an interrogation unit or system for fiber Bragg
grating are rapidly research starting from 1992 until now by all university and research
institution. There are many methods or techniques that have been demonstrated for the
used to interrogate the spectrum from fiber Bragg grating to recover the important
parameter of the wavelength shift. Also the methods are designed by the consideration of
the resolution of wavelength respect to power variation, single or multiplex FBG sensor
and wavelength range.
2.1.1
Passive Wavelength Demodulation System
A simple and passive measurement technique for the determination of the
wavelength of the narrow-band spectral peak is proposed by (Melle S. M. et. al., 1992).
The system splits the back-reflected light from the Bragg grating into two beams. One
10
beam is filtered in proportion to its wavelength, while the other beam is used as a
reference to compensate for any intensity fluctuations. This detection system was used to
measure the wavelength of the narrow-band back-reflected peak of an in-line fiber Bragg
grating used as an absolute strain sensor.
An example of the detection system as used in a fiber optic configuration is
shown in Figure 2.1. The back-reflected light from a narrow-band guided-wave Bragg
grating is split into two beams of equal intensity. The splitting ratio should have
negligible wavelength dependence over the range of interest. One of the beams is filtered
before being detected by a photodetector. The filter possesses a wavelength dependent
transmittance which is linear over the wavelength range that corresponds to the full scale
measurement range of the system.
FBG
Broadband
Source
IMG
Wavelength
Dependent
Filter
Signal
Amplifier
Signal
Amplifier
Signal
Amplifier
Output
Figure 2.1: Schematic of passive wavelength demodulation system
The other beam, serving as reference, is unfiltered and is detected by a similar
photodetector. The output from each photodetector is amplifier before being fed to an
analog divider. The ratio of the filtered beam over the references beam provides the
wavelength information on the reflected peak and serves to eliminate the effect of the
intensity variations due to uneven power distributions of the source spectrum, alignment
uncertainty of the connectors, microbend attenuation in the lead, and power fluctuations
of the source.
11
Among the types of filters that can be used in such a system are: colored glass
bandpass filters, narrow-band or edge interference filters, dichroic filters, tapered optical
fibers or another fiber Bragg grating. The wavelength demodulation system (WDS) was
used to measure the wavelength of a fiber Bragg grating used as a strain sensor, and
tracked both static and dynamic strains.
The ratio of the filtered to reference light was measured as a function of static
strain from -5500 µε to +5500 µε. The measured strain resolution was 375 µε,
corresponding to a resolution of approximately 1% over the full scale measurement
range of the WDS.
2.1.2
Long Period Grating
The principle of using a LPG to interrogate a FBG strain (or temperature) sensor
is based on the strain/temperature related optical power measurement (Fallon R W, et.
al., 1998). If an interrogation system is arranged in such a way (Figure 2.2) that the light
reflected back from the FBG sensor is transmitted by the LPG, the intensity of the
transmitted light is altered. It can decrease or increase (depending on which side of the
LPG, is used in filtering) with the strain/temperature-induced wavelength shift of the
FBG. The LPG had a 20 nm transmission peak with a rejection ratio of 22 dB, as
indicated in Figure 2.2, exhibiting a linear response of ~1.8 dB nm−1. This allows the
device to be employed as a linear response edge filter acting as a wavelength-toamplitude converter. When a FBG is stretched its wavelength shifts (~1 pm µε−1),
therefore the filtering mechanism of this long-period structure yields a linear relationship
between the strain and the transmitted light intensity.
12
FBG
Broadband
Source
IMG
Modulator
Function
Generator
Long
Period
Grating
Lock-in
Amplifier
Figure 2.2: Experimental set-up for fiber grating sensor interrogation. The dotted boxes
outline the modulation system employed in the resolution improvement experiment
This interrogation technique achieving 8100 µε dynamic range and 0.5 µε staticstrain resolution. This technique utilizes the spectral rejection profile of a long-period
grating to convert wavelength into intensity encoded information. The performance of
the system was further improved by modulating the illumination source and employing a
lock-in detection method to extract strain information. This all-fibre optical sensing
system should be useful in strain and temperature sensing applications requiring a large
dynamic range and/or high resolution.
2.1.3
Acousto-optic Tuneable Filter
The other methods have limitations when it is desired to interrogate the
wavelength of a large number of fiber gratings in a frequency-agile manner. (Xu M. G.
et. al., 1993) present a new method of constructing an interrogating system for in-fiber
Bragg grating sensors using an acousto-optic tunable filter. This type of filter possesses
13
the desired frequency-agile capability for random access and has a wide tuning range. At
constant temperature, its peak transmission wavelength is determined solely by the
frequency of an RF drive signal and it is therefore suitable for both dynamic and
quasistatic strain sensing and for multiplexed sensing systems. In addition, the same
detection system can be used to measure the Bragg wavelengths of the gratings in either
reflective or transmissive configuration.
The setup for these experiment are shown in Figure 2.3. Light from a broadband
optical source (ELED) is coupled, via the in-fiber grating to be measured, through the
AOTF and then to a detector. The wavelength of the light transmitted by the AOTF is a
function of the RF frequency. To track the instantaneous Bragg wavelength, it is feasible
to employ a feedback signal to lock the mean optical wavelength of the filter to the
instantaneous Bragg wavelength of the in-fiber grating. This involves dithering the
applied RF frequency about a nominal value (i.e. FSK) and detecting the amplitude
modulation of the received optical carrier.
Monomode
fiber In-fiber grating
lens
AOTF
lens
ELED 1300nm
Peltier heat
pump
VCO
S
Monomode
fiber
Optical
receiver
RF amplifier
Feedback
system
Lock-in
amplifier
LF
Signal generator
Figure 2.3: Schematic diagram using acousto-optic tuneable filter
Assuming that the AOTF mean wavelength is proportional to applied RF
frequency over the measurand-induced wavelength shift of each in-fiber grating, then for
symmetrical grating and filter responses, the amplitude modulation at the dither
frequency is zero when the mean wavelength of the AOTF coincides with the Bragg
14
wavelength of the grating. This condition can be achieved by adjusting the mean
frequency of the FSK signal.
The FSK signal is conveniently generated using a voltage controlled oscillator
(VCO), with a low-frequency squarewave input plus a DC bias signal to tune the mean
frequency. The electronics system shown in Figure 2.3 serve to lock the mean frequency
of the AOTF to the condition where the amplitude modulation is zero. The mean
frequency of the VCO would then provide an indication of the corresponding
instantaneous Bragg wavelength of the sensor. For multiplexing it would be necessary to
apply an impulse to the VCO input to cause it to address and then lock onto a different
in-fiber grating. Alternatively the filter could be simultaneously driven by multiple RF
signals of different frequencies, each set to track a particular grating as described above.
The system is feasible to be operating in open loop configuration. The broadband
source used was a 1300nm singlemode fiber-pigtailed ELED, which launched 50µW of
output power over a 56nm bandwidth (FWHM). The sensing grating, having a nominal
(i.e. unstrained and at room temperature) Bragg wavelength of 1298 nm, a peak
reflectivity of 99% and a bandwidth of 1 nm (FWHM), was incorporated between the
optical source and the AOTF. The AOTF had a wavelength tuning range of 1.2-2.5 µm
and a resolution (FWHM) of 4 nm. The system also used a commercial RF signal
generator as a VCO. The frequency deviation of the FSK-modulated drive signal to the
AOTF was chosen to be 360kHz to obtain optimum sensitivity for the particular
AOTF/grating configuration. The mean RF drive frequency was manually chosen to be
111.58 MHz to set the mean AOTF wavelength to the nominal Bragg wavelength.
M. G. Xu have demonstrated an attractive method for the interrogation of a
Bragg grating sensor using an acousto-optic tunable filter. This technique serve to
monitor thermal, strain or pressure monitoring and offers considerable advantage over
previous approaches. In particular the method has the potential for frequency-agile
access, wide tuning range, and the ability to recover after transient signal loss etc., all of
15
which are likely required in practical multiplexing applications. The system developed is
therefore likely to provide a practical means for interrogating multiplexed in-fiber Bragg
grating sensors.
Acoustooptic tunable filters (AOTFs) have been used as both the interrogating
and wavelength demultiplexing element in a FBG sensor system. More recently, they
have also been used to provide wavelength demultiplexing in a system, which
incorporated interferometric wavelength shift detection to recover the Bragg wavelength
shifts. In that work, the filter was sequentially tuned to each FBG. In 2001 (Boulet C. et.
al., 2001) present a significant improvement on that approach, which provides
simultaneous interrogation of the FBGs, thus allowing the simultaneous recovery of
signals from multiple gratings. As a proof of principle experiment, two gratings are
interrogated, but the approach is readily scaleable to more.
The illustrated in Figure 2.4 show the arrangement of these technique. Two RF
signals are applied to the AOTF, which cause the device to transmit two narrow
wavelength bands λ1 and λ2 chosen to match the two gratings. In order to differentiate
between the two signals at the detector, the two RF signals are amplitude modulated at
different frequencies f 1 and f 2 . This in turn causes the light at λ1 to be modulated at f 1
and the light at λ2 at f 2 . Demultiplexing is then accomplished by electronically filtering
the detected signal at f 1 and f 2 , as shown.
16
Figure 2.4: Experimental arrangement using AOTF
This procedure provides the wavelength demultiplexing, but it is still necessary
to recover the measurand. This is done using interferometric wavelength shift detection;
the system is illuminated by a broad-band source through an unbalanced Mach–Zehnder
interferometer (MZI). The interferometer is repetitively scanned over one free spectral
range at a frequency f c , much lower than f 1 and f 2 . In the absence of f 1 and f 2 , the
light returned from the FBGs is amplitude modulated at f c , and any measurand-induced
wavelength shift is transduced to a shift in the phase of that modulation. The signals
from the two gratings are obtained after the appropriate bandpass filter by rectifying the
signal and using a lock-in amplifier as a phase meter or examining the signal on a
spectrum analyzer.
2.1.4
Active Wavelength Demodulation Using Acousto-optic Tunable Filter
In particular, high resolution is necessary over wide ranges of wavelength to
facilitate the interrogation of wavelength multiplexed sensors, where a number of Bragg
sensors are used in the same optical fiber, each operating in its own wavelength band.
An active wavelength demodulation system (AWDS) suitable for these applications can
be built using an acousto-optic tunable filter (AOTF). Xu et al. proposed an AOTF based
AWDS which used a frequency shift keying (FSK) approach to track the wavelength of
17
a Bragg grating. However, they did not demonstrate their system working in an active
mode, presenting instead data for open-loop operation. Dunphy et al. reported having
demonstrated a tracking AOTF based AWDS, but no details on their system were
disclosed. Coroy and Measures demonstrated an edge-locked tracking AOTF based
AWDS for measuring the output from a tunable laser, where the output of the laser was
similar to the output expected from a Bragg fiber laser sensor.
However, that initial work did not address the problem of broadband light
interrogated Bragg grating sensors, whose reflected signals are of much lower power
than Bragg fiber laser sensor signals. (Coroy T. et. al., 1995) present for the first time
detailed results of a closed-loop edge-locked tracking AOTF based AWDS used to
interrogate a Bragg fiber-optic strain sensor illuminated by a broadband source. The
experimental setup for this work is shown in Figure 2.5. A broadband super-luminescent
diode (SLD) was used to illuminate a 1324nm nominal wavelength Bragg grating
sensor, and its reflected wavelength-encoded signal was used as the input to the AWDS.
Figure 2.5: Experimental setup for demonstration of edge-locking AOTF based AWDS
for broadband light interrogated Bragg grating sensor
SLD: super luminescent diode; P: polariser; PM: polarisation maintaining fiber; VCO:
voltage controlled oscillator; RF amp: RF amplifier:
∫
: integrator
The Bragg grating sensor was mounted on a beam with an electrical strain gauge
beside it for reference. The beam was placed under four-point loading, and the strain was
18
measured using the electrical strain gauge while the wavelength. relative power, and
spectral qualities of the Bragg grating reflected signals were monitored using an optical
spectrum analyzer. The optical spectrum analyzer was able to monitor the Bragg grating
reflected signals from the portion of those signals reflected from the various optical
components of the AWDS.
The wavelength demodulation may be described as follows: The optical signal
input to the AWDS is first split into two parts. One of these parts is passed through an
AOTF and the other part is fed directly into a second detector. The detector signals are
compared to provide an error signal independent of the input optical power, which is
then used as negative feedback to the AOTF, so that the AOTF tracks the wavelength of
the input optical signal. The wavelength was measured by noting the input to the voltage
controlled oscillator (VCO), which determines the state of the AOTF. For these
experiments, a synthesized signal generator was used as the VCO.
The acousto-optic TE-TM converter was temperature controlled using a
thermoelectric cooler and a temperature sensor to limit AOTF tuning drift due to
temperature fluctuations. The full tuning range of the AOTF used here, and thus the
measurement range of the AWDS, was > 60nm. The AWDS response was fairly linear,
yielding a measurement resolution of 2.24 µstrain or 2.62 pm wavelength with the
1324nm Bragg grating sensor, equivalent to an output precision of 0.001 V from the
AWDS. Nonlinearities in the response of the system were due, at least in part, to
nonlinearities in the synthesised signal generator used for the VCO. The wavelength
resolution of the present system was limited primarily by the degree to which the AOTF
was temperature stabilised.
2.1.5
Wavelength Division Coupler
The output of FBG sensors are inherently wavelength encoded and therefore
require a scheme to detect small wavelength shifts corresponding to the detected
parameter. This can be achieve by using interferometric detection and fiber Fabry-Perot
19
filters. Although these solutions provide extremely high Bragg wavelength shift
resolution and consequently high temperature or strain sensitivity, they are relatively
complex systems. Owing to the wide application potential of these sensors in
engineering systems, where high resolution may not be required, but the need for a
modest demodulation technique requiring a minimum of components and low cost is the
highest priority.
(Davis M. A. and Kersey A. D., 1994) have develop a system using wavelength
division coupler. The wavelength encoded narrowband output of a FBG strain sensor
was split into two paths: in one path the intensity was directly measured while the other
passed through a bulk optic wavelength dependent filter before reaching a detector.
Provided the filter cut-off is close to the Bragg wavelength, the ratio of the two
intensities then provided a determination of the wavelength. This bulk optic
demodulation approach however, presents several possible complications: first, extreme
care must be taken to prevent unwanted reflections and power loss in the system.
Secondly, the use of a filter inherently causes signal intensity loss which may not be
acceptable in large multiplexed systems where power levels are low. In this system a use
of a simple all-fiber implementation of the wavelength discrimination principle using a
wavelength dependent 2 x 2 fiber optic coupler which overcomes these difficulties.
Figure 2.6 shows the strain sensing configuration. The FBG sensing element was
illuminated using a broadband source via one port of a typical 3 dB fiber optic coupler.
The FBG element returns a narrowband component which was directed to the
wavelength dependent coupler; a fiber isolator was used to protect the source from this
reflected component. Detection of the output intensity of both ports on the output
coupler and simple electronic processing reveals a voltage directly proportional to the
grating strain. In the experimental testing an erbium-doped fiber superfluorescent source
was used as the broadband source, supplying 300µW of optical power. An isolator was
used to prevent lasing by eliminating reflections from the FBG back into the EDFA. The
FBG sensing element demonstrated a Bragg wavelength of 1548nm at room temperature
and unstrained, with a bandwidth of 0.2nm.
20
Broadband
Source
isolator
FBG
IMG
P
P1
Wavelength
Division
Coupler
P2
P1
P
P2
p
Signal
Amplifier
Signal
Amplifier
P1-P2
Output
P1.P2
?
Figure 2.6: Diagram of strain sensor configuration using a fiber Bragg grating and
wavelength division coupler
The wavelength division coupler was designed to couple wavelengths at 1510
and 1575nm. Although the coupler can be used as a wavelength discriminator over the
wavelength range 1515 – 1570nm it was found to exhibit a near constant change in
coupling ratio of 0.4dB/nm over the span 1520 – 1560nm, covering the EDFA
wavelength range. This coupler therefore provides considerable operational wavelength
range for the FBG wavelength shift. The electronic processing of the two detected power
levels consisted of taking the ratio of the difference to the sum of the outputs to
normalise for intensity variations. By effectively eliminating intensity variation effects
the system maintained the advantageous intensity insensitive operation of fiber Bragg
gratings.This system was indeed simple and cost effective and had a dynamic strain
resolution of ~0.5 µstrain/√(Hz), which is sufficient for vibration studies in smart
structures.
2.1.6
Highly Overcoupled Couplers
Detectability of 10 µstrain with an LED emitting 5 µW was achieved with a
highly over-coupled coupler (HOCC) system demonstrated by (Zhang Q. et al., 1995).
The 626 cycles in the fabrication process resulted in a HOCC of 60% /nm. A
temperature controlled chamber was used to match the spectrum of the coupler to the
21
Bragg wavelength of the sensor. A temperature of 45°C was used. This is demonstrated
in Figure 2.7. The processing was the same as that of the wavelength division coupler
described in section 2.1.5, the method of (Davis M. A. and Kersey A. D., 1994) where
the ratio of the split input intensities was determined.
Figure 2.7: Experimental setup for Bragg wavelength detection using HOCC
This system was demonstrated for strain measurement but can easily be
implemented for temperature measurement. Measurements can be made over a
wavelength range of 2.1 nm (between 1700 and 2100 µstrain), which is good for a single
sensor, but multiplexing sensors with this system would not be very practical.
2.1.7
Biconical Fiber Filter
A Bragg wavelength-shift detection scheme using a biconical fibre filter provides
a passive self-referencing technique (Lobo Ribeiro A. B. et. al., 1996). In this scheme,
the backreflected light from the Bragg grating sensor is split into two beams, one of
them being spectrally filtered so that its transmitted intensity is determined by its
wavelength, while the other beam is used for power referentiation. Provided the filter
cutoff is close to the Bragg wavelength, the resulting ratio of the two intensities is
proportional to the wavelength of the backreflected light, and independent of the optical
power fluctuations along the system. Here, they demonstrate the use of this wavelength
discrimination principle using a biconical fiber filter (BFF), a solution that avoids the
problems of unwanted reflections and power loss usually present in bulk optical systems.
22
This filter is basically a section of singlemode depressed-cladding fiber, which
consists of a contracting tapered region of decreasing fiber diameter followed by an
expanding taper of increasing fiber diameter. The wavelength response of the filter is
oscillatory with a large modulation depth, propagating only certain wavelengths through
the fiber while heavily attenuating others. Other recent approaches for fiber Bragg
sensing demodulation use wavelength division fiber couplers as the wavelength
discriminator, simplifying the intensity referentiation. However, WDMs are in general
expensive components and require fabrication processes more complex than the one
needed to produce the biconical fiber filter (BFF).
Figure 2.8 illustrate this demodulation scheme. An erbium-doped fiber
superfluorescent source (EDFA with a dopant level of 2000ppm) was the broadband
light source used to illuminate the FBG sensing element via one port of a typical 3dB
fiber optic coupler (Cl). A fiber isolator was used to avoid lasing of the source. The FBG
demonstrated a Bragg wavelength of 1524nm at room temperature and unstrained, with
a reflectivity of ~95% and bandwidth of ~0.2nm. The retuned wavelength component
from the FBG was split again by a second 3dB coupler (C2) into two paths: in one path
the intensity was directly measured while in the other it passed through a biconical fiber
filter (BFF) before reaching a detector.
Figure 2.8: Schematic diagram of demodulation scheme
IMG: index matching gel; ∆ε: applied strain
23
The BFF, exhibiting the transfer function was designed with an oscillation
period of ~45nm and an extinction ratio of ~8dB. Over the range 1520-1530nm, the
filter shows a near linear response of ~0.5dB/nm. To measure the wavelength shift of the
FBG sensor, the ratio of the two detected intensities was implemented using an
electronic analogue divider. In this way, compensation is performed for time-varying
intensity fluctuations and spectral intensity variations of the broadband source, and also
for any coupling loss and microbend fluctuations up to coupler C2. This coupler must
have a coupling ratio that has a negligible wavelength dependence compared with the
transfer function of the BFF. The FBG sensor was bonded to a piezoelectric transducer.
The sensor output response for induced axial strains up to 700µstrain. Here, linearity can
be observed throughout the measured region and the obtained data indicates a static
strain resolution of ~±3.5µstrain.
To measure the dynamic strain resolution of the sensing system a 7.8µstrain
amplitude signal at 8Hz was applied to the FBG. A signal/noise ratio of 28dB in a
62.5mHz bandwidth was observed, which corresponds to a minimum detectable
dynamic strain of 1.5µstrain/√Hz. Although the resolution achieved using this
demodulation scheme is smaller than the one obtained using some other demodulation
schemes (the extreme case being the interferometric technique), it is still sufficient for
many important applications, such as in smart structures. Also, it is relevant to
emphasise that the resolution achieved with the demodulation technique presented here
can be, to some extent, tailored to the application envisaged via design of the BFF, i.e.
acting on its wavelength oscillation period and extinction ratio. Similarly to other FBG
demodulation schemes, the concept proposed here can be used to interrogate several
sensors combining it with standard fiber sensing multiplexing schemes (for example,
time division multiplexing).
2.1.8
Matched-filter Interrogation
The basic principle of operation of the technique described here is the use of a
‘receiver’ grating which acts as a notch filter to strongly reject the light reflected from a
24
remotely located sensor element (Davis M. A., Kersey A. D., 1995). To do this, the two
gratings are formed at nominally equal Bragg wavelengths, and the strain-induced shift
in the sensing grating can be tracked by the receiving notch filter via a suitable strain
transducer, such as a piezoelectric actuator. This process can be easily expanded to an
array of FBGs provided an identical grating array is used for the sensor and receiver
arrays and each receiver grating can be tuned independently to track its corresponding
sensor.
With such an array of elements the receiver array essentially performs a matched
filter function The experimental setup used to test this technique is shown in Figure 2.9,
light from a superflourescent source (pumped Er+ fiber) was passed through a 3dB
coupler to illuminate the sensing FBG array. This array consisted of a set of six gratings
spanning the wavelength range 1530 - 1557nm, with each grating spaced by 5nm. Light
reflected from this array passed through the receiving matched-filter array to a detector
as shown. The system could easily be expanded to include all the FBGs in multiplex
form. Two of the sensor gratings, with nominal wavelengths of 1551.8nm (FBG5) and
1557.2nm (FBG6) were bonded Lo separate aluminum plates and placed in three-point
bending configurations to induce controllable independent strains on each grating.
Figure 2.9: Experimental setup for matched-filter interrogation of FBG sensors
25
To track these two sensor gratings the matching two filter gratings at 1551.8nm
and 1557.2nm were mounted on separate small stretching devices driven by
piezoelectric (PZ) stacks. These stretchers allowed independent straining of the filter
gratings by way of an applied voltage to the PZ stacks. To track their counterparts in the
sensing array, a small dither signal was applied to the 1551.8nm and 1557.2nm gratings,
respectively. The light transmitted through the filter grating array was detected by a
single photodetector located at the end of the filter grating array. The detected signal was
fed to two lock-in amplifiers each referenced to the dither signals applied to the filter
gratings.
The outputs of the two lock-ins were then summed with the dither signals and fed
back onto the filter gratings. This feedback loop allowed the filter gratings to accurately
track any strain induced shift in the sensing gratings with the lock-in output signals
providing a voltage directly proportional to the observed strains. This transmissive
configuration for detecting the returned signals from the gratings is a very efficient
method for processing the return signals from an FBG sensor array as it minimised
components by requiring only one photodetector and one input/output coupler. Previous
configurations required the use of additional couplers and detectors which further
attenuated the relatively weak returned signals from the sensing Bragg gratings.
These systems detected the reflected light from the filter gratings, resulting in
additional power losses and thus possible system performance limitations. The use of
filter gratings in transmission eliminates unnecessary power losses and provides higher
sensor sensitivity. The system shows that good linearity was obtained over a range of
200µstrain for each of the two gratings. The small variations observed were possibly due
to nonlinearities in the PZ voltage response. The different dither frequencies applied to
the fiber gratings permitted simultaneous measurement of the strains placed on all
gratings. Indeed, independent operation of the two sensing gratings was observed with
no apparent crosstalk between the two channels. This system is tested for only inducing
to 500µstrain on the matched filter gratings and therefore limited the range of the
system, however this could be easily expanded using mechanical strain amplification to
26
induce a wider tracking wavelength range. The system was also capable of detecting low
frequency strain components as well as static components within the limits of the dither
signals applied to the filter gratings. The dynamic strain response of the system was
determined by placing a 0.4 µstrain RMS tone at 27Hz on FBG6. The detected strain
signal was fed into a spectrum analyser and the inset, the applied tone can be seen at
27Hz and the minimum detectable signal is then calculated to be 0.01µstrain/√Hz RMS
for frequencies > 3Hz.
2.1.9
Interrogation of Wavelength Division Multiplexed FBG Using Arrayed
Waveguide Grating
An arrayed waveguide grating (AWG) has recently been used for interrogation
purpose (Norman D C C, et. al., 2003). The setup for this experimental setup is shown in
Figure 2.10. An approach for utilizing a heterodyne based on interferometric wavelength
shift detection. A non-polarised erbium-doped fiber amplified spontaneous emission
source provided a total output power of 12 dBm over a spectral width of 33 nm centred
on a wavelength of 1545 nm. Light from the source passed through an unbalanced
Mach-Zehnder interferometer. One arm contained a phase modulator and the other an air
gap to enable the interferometer optical path difference to be easily varied. Polarisation
controllers were used to interface to the phase modulator and provide good fringe
visibility. The light was then directed to a pair of FBGs, one of which was mounted onto
a piezoelectric stretcher so that a longitudinal strain could be applied. Reflected light
from the FBGs was directed to an optical channel monitor (OCM). The Bookham OCM
is a 40-channel AWG with integral photodetectors providing 40 amplified electrical
outputs. The AWG channels have a spacing of 100 GHz or about 0.8 nm and a 1 dB
passband per channel of ±100 pm.
27
Figure 2.10: Experimental setup wavelength division multiplexed FBG using arrayed
waveguide grating
Modulating the phase of the interferometer using a 2π amplitude serrodyne
waveform produces a sinusoidally oscillating intensity backreflected from the FBG. The
OCM then produces an electrical carrier, phase modulated by any measurand-induced
wavelength shift from an FBG sensor. They demonstrated that simply summing the
outputs from several neighbouring channels can extend the measurement range, while
still allowing sensitive and multiplexed operation, as demonstrated by the inclusion of
FBG 2 in the system.
Using this approach, the main issue concerns how the SNR varies, particularly
when the FBG is situated between two passbands. To investigate this dependence, strain
amplitudes of 1.5 µε at 30 Hz were applied to three different FBGs: two of increasing
bandwidth and a third with a double peaked structure. The phase modulator was driven
to produce a carrier at 10 kHz. The first FBG had a centre wavelength of 1558.29 nm
and a 3 dB bandwidth of 0.13 nm. The free spectral range (FSR) of the interferometer
was 0.8 nm. The system obtained the result for double peaked FBG an average noise
limited resolution of 17nε/√Hz was obtained.
28
2.2
Fiber Bragg Gratings
In the optical circuit, the most important part is a wavelength filter. All the
information is stores in inside the optical only corresponding to the variation of power or
wavelength. The tunable filter is a wavelength filter that can scan the optical spectrum to
determine the power of a single wavelength or called spectra. Usually it was made using
interferometer and diffraction principle. In this system the wavelength tunable filter is
the main component to build interrogation unit for fiber Bragg grating sensor. For a
detecting of wavelength shifts in fiber Bragg grating system, the Fiber Fabry Perot (FFP)
and fiber Mach Zehnder (MZ) interferometers are recognize as a tunable narrowband
wavelength filter (Weis R. S., 1994) because of high resolution, system simplicity, cost
effective, robust and measurement agility.
A device based on a Fabry Perot is proposed in this study because of the high
expected resolution and of the simplicity configuration compared to the others
interferometer device such as Michelson interferometer. But, before cover up the Fabry
Perot principle, a fiber Bragg grating theory are explained first for the used to
understand the sensor and also it connection to the wavelength tunable filter itself.
Fibre Bragg Gratings (FBGs) are periodic perturbations of the refractive index
along the length of the core of an optical fiber waveguide. The gratings are induced by
exposing the fiber core to a periodic pattern of ultra violet (UV) light over an extended
time. The prolonged exposure results in a permanent refractive index change in the core
of the fiber. The induced refractive index modulation, called a fiber Bragg grating,
depends on the pattern and properties of the exposure UV light.
The discovery of fiber Bragg gratings is attributed to the work of Hill et al. at the
Communication Research Centre in Canada (Hill K. O., 1978). In an experiment initially
intended to investigate nonlinear effects in optical fibers, Hill and his co-workers
observed refractive index changes when UV light was launched into the fiber core. Hill
et al. also noticed that the refractive index change caused light to be reflected back to the
29
source. Realising the potential use of his discovery as a selective later, Lam and Garside
(Lam D. K. W., 1981) showed the relationship between the photoinduced refractive
index and the power of the exposure UV light. This led to the discovery of a new, sidewriting technique by Meltz et al. in 1989 (Meltz G., 1989). Meltz’s technique
demonstrated external fabrication of FBGs in germanium-doped, greatly simplifying
Hill’s method.
Since Meltz’s work in 1989, new technologies for producing FBGs externally
have developed rapidly. The new techniques have removed the complexity in the
manufacturing process of FBGs, making them reproducible at lower costs. As a results,
FBGs have found many commercial applications in sensor systems and optical fiber
communications.
For sensor applications, complete discussions on the use of FBGs for
temperature, strain and pressure sensors are given by Kersey et al. (Kersey A. D., 1997)
and Kashyap (Kashyap R., 1994). In communications FBGs have found applications in
wavelength stabilisation of semiconductor lasers (Ball G. A., 1991, Hamakawa A.,
1996). They are also used in dispersion compensation of long haul transmission systems
(Williams J. A. R., 1994). Add/drop multiplexers for dense wavelength division
multiplexed (DWDM) networks have been designed cost effectively using FBGs (Giles
C. R., 1995). Further uses in communications include: Gain flattening for erbium-doped
fiber amplifiers (Kashyap R., 1993); wavelength tuning for optical sources (Tohmori Y.,
1993); and temperature sensor for wavelength routers in WDM passive optical networks
(PONs) (Frigo N. J., 1994). The first application of FBGs in wireless communications
was demonstrated by Ng and coworkers in the implementation of true-time delay (TTD)
control for microwave phased-array antenna systems (Ng W., 1991).
2.2.1
Theory Of Fiber Bragg Gratings
This section intends to describe a mathematical model that represents the fiber
Bragg grating. The model will form the basis for the design process for FBGs and will
30
enable the designer to estimate the anticipated properties of the designed component. For
purposes of clarity and continuity in the discussion on FBGs, it is appropriate to begin
with an overview of mode propagation in unperturbed optical fibers. This understanding
of the waveguide theory of optical fibers will lay the foundation for coupled mode
theory responsible for the analysis of FBGs.
2.2.1.1 Mode Theory for Optical Fibers
This section gives a summary of the theory behind the propagation
characteristics of light waves in optical fibers. The theory gives an understanding of the
propagation modes that exist when light is launched inside the core of an optical fiber.
The analysis will be limited to step index fiber as shown in Figure 2.11. The solution for
graded index fibers will only be stated. This analysis is in line with the work presented
by Jones (Jones W. B., 1988).
Figure 2.11: Schematic diagram of step-index fiber with cylindrical coordinates
To study the propagation of light waves in step-index fiber, consider a fiber of
core radius a, and indices of refraction n1 and n2 for core and cladding respectively. The
indices of refraction are such that n1 > n2 and the cladding radius is assumed to be
infinite. Figure 3.1 shows a schematic diagram of the step-index as described above. A
light wave travelling in the z direction is described by a solution to Maxwell’s equations
in cylindrical coordinates as presented in (Kerser G., 2000). Assuming the propagation
in the z direction is described by the expression e j (ωt − βz ) , Maxwell’s equations can be
summarised as
31
Er = −
j
u2
1 dH z
dE z
β dr + ωµ r dθ
2.1
Eθ = −
j
u2
dH z
1 dE z
β r dθ − ωµ dr
2.2
Hr = −
j
u2
1 dE z
dH z
β dr − ωε r dθ
2.3
Hθ = −
j
u2
dE z
1 dH z
β r dθ + ωε dr
2.4
where
u 2 = ω 2 µε − β 2 = k 2 − β 2
2.5
E and H are the electric field and the magnetic field respectively. ε and µ are the
permittivity and permeability of the medium and k is the free-space propagation
constant. The parameter β is the z component of the propagation vector determined by
the fields at the core-cladding interface in Figure 2.11. Using Equations 2.1 to 2.5, the
wave equation for the electric field in cylindrical coordinates E z (r, θ ) can be determined
as
d 2 E z 1 dE z 1 d 2 E z
+
+ 2
+ u 2 Ez = 0
2
2
dr
r dr r dθ
2.6
By assuming all terms with θ are periodic in θ with periodic 2π/v where v is an integer,
equation 2.6 can be reduced to
d 2 E z 1 dE z 2 v 2
+
+ u − 2 Ez = 0
dr 2
r dr
r
2.7
Equation 2.7 is Bessel’s differential equation. The solutions to this equation are
Bessel functions that vary with the parameter v. The solutions for the electric fields in
the core and in the cladding differ as a result of the dependence on the radius r. The
solution for the electric field in the core is
E z (r, θ ) = AJ v (ur )e jvθ
r<a
2.8
r>a
2.9
and for the field in the cladding,
E z (r, θ ) = BK v (wr )e jvθ
32
where Jv(ur) are Bessel functions of the first kind and Kv(wr) are modified Bessel
functions of the second kind. Similar equations can be derived for the magnetic field.
The parameters u and w are defined as
u 2 = k12 − β 2
2.10
w 2 = β 2 − k 22
2.11
and
where k1 = 2πn1 / λ and k 2 = 2πn2 / λ . A closer examination of the Jv(x) and Kv(x)
functions helps to describe the behaviour of the electric and the magnetic fields. The
Kv(x) functions are positive for all values of x; they tend to infinity at x = 0; and
approaches zero at very large values of x. The Jv(x) functions are sinusoidal functions
exhibiting oscillatory behaviour for real values of x. They have an infinite number of
zeroes along the x-axis, and their amplitude decays with increasing values of x as shown
in Figure 2.12.
Figure 2.12: Graphs of Bessel functions of the first kind for v = 0, 1, 2, 3
The normalised frequency V is defined by parametes of the core and the cladding
as
[
1
]
V = k12 − k 22 2 a = 2π
and it can be deduced that
a
[n
λ
2
1
− n22
1
2
]
2.12
33
V 2 = (ua ) + (wa )
2
2
2.13
The boundary conditions for step-index fiber are applied in equations 2.8 and 2.9 for the
E and the H fields alike with r = a. When equating the z and θ components of the electric
and magnetic fields, the result is an eigenvalue equation that relates propagation
parameters in the core and cladding. The solutions to the eigenvalue equation (i.e. the
eigenvalues) define the set of propagation parameters that represent possible modes of
propagation. The only modes that can propagate inside the fiber are those that
correspond to the eigenvalues.
In weakly guiding fibers (i.e. fibers with the restriction (n1-n2)/n2 = 1) commonly
used in many applications, the eigenvalue equation can be greatly simplified to the
general form shown in equation 2.14 below.
J v (ua )
u K v (wa )
=−
J v −1 (ua )
w K v −1 (wa )
2.14
A graphical representation of equation 2.14 shown in Figure 2.13 helps to solve
for the eigenvalues. The points of discontinuity of the Jv/Jv-1 graphs are determined by
the zeros of the Bessel functions as shown in Figure 2.12. The intersections of the two
graphs identify the eigenvalues which in turn determine the modes that will propagate
through the fiber. The maximum value for the index v, for which equation 2.14 above
has a solution, is determined by V. As indicated in Figure 2.13, there are no eigenvalues
beyond ua = V, and we refer to V as the cut-off frequency. By implication all modes the
order v, with eigenvalues greater than V will cease from propagating through the fiber.
34
Figure 2.13: Graphs of the eigenvalue equation of step-index fiber for v =0 and 1
A clearer description of the eigenvalues is achieved when defining the
eigenvalue using two subscripts (i.e. uvm). For example u13 refers to the third eigenvalue
for v = 1. After successfully finding the eigenvalues, the propagation contants of the
modes travelling inside the fiber can be calculated as
2
β vm = k12 − uvm
2.15
Where k1, as defined earlier, is an index property of the fiber core material and uvm is the
vm th eigenvalue. The modal electric fields in the fiber are represented by all
components in the core and cladding as
E vm (r , θ , z ) = bvm (r , θ )e jβ vm z
2.16
where bvm (r , θ ) is the amplitude of the transverse electric field of the vmth propagation
constant.
The analysis for optical fibers with a graded refractive index profile is more
complex due to the unavailability of straightforward eigenvalue equations as in the case
for step index fibers. The solution is achieved by performing integration across a section
of the graded index core of the fiber. The resultant propagation constants as summarised
by Jones (Jones W. B., 1988) are,
35
m
M
g
1
2
β m ≈ k1 1 − 2∆
m = 1, 2, 3,…
2.17
where
g=
α
α +2
α ⋅∆
M ≈ a 2 k12
α + 2
2.18
2.19
and ∆ is defined as ∆ = (n1 − n2 ) / n1 , α is the order of refractive index profile and m is
the mode group index. The knowledge about the propagation of light waves, developed
in this section, lays the foundation for understanding the effect of FBGs on the output of
the fiber.
2.2.1.2 Coupler Mode Theory
The most widely used technique for modeling optical properties of fiber Bragg
grating is coupled mode theory (Hill K. O., 1978). According to Erdogan (1997), the
coupled mode theory can be used to accurately model the optical properties of fiber
gratings. The coupled mode theory is initially developed for uniform gratings. However,
Kogelnik (Iocco A., 1999) extended the model to cover aperiodic structures such as the
fiber used in this research. There are basically two standard approaches for analyzing the
reflection and transmission spectra resulting from two modes coupling in non-uniform
gratings. First, one could numerically integrate the couple mode equations. Second, and
the approach used in this research, one may apply a piecewise-uniform approach, where
the grating is divided into discrete uniform section.
The coupled mode theory is often as a technique for obtaining quantitative
information about the diffraction efficiency and spectra dependence of fiber gratings. It
is one of the most popular techniques utilized in describing the behaviour of Bragg
grating, mainly due to its simplicity and accuracy in modeling the optical properties of
most fiber grating of interest. The transverse component of the electric field in the ideal
mode approximation to coupled mode theory as a superposition of the ideal modes is
36
given by (Hill K. O., 1978, Kawasaki B. S., 1978, Iocco A., 1999 and Morey W. M.,
Ball G. A. and Meltz G., 1994):
[
]
E T ( x, y, z , t ) = ∑ Am+ ( z )e iβ m z + Am− ( z )e iβ m z emT ( x, y ) exp(−iωt )
2.20
where Am+ (z ) and Am− (z ) are slowly varying amplitudes of the mth mode traveling in the
+z and –z directions, respectively, and the propagation constant β is simply
β = (2π / λ )neff . The transverse mode field emT ( x, y ) described the bound core or
radiation LP modes, or they might describe cladding modes.
For the Bragg grating coupling, let β1 represent the propagation constant of the
mode propagating in the +z direction and β2 that of the mode traveling along the –z
direction. The z direction is along the fiber core axis. Near the wavelength for which
reflected of a mode of amplitude A(z) into the identical counter-propagating mode of
amplitude A − (z ) is the dominant interaction in the Bragg grating,
dA +j
dz
) [
(
]
) [
(
= i ∑ Ak+ K kjt + K kjz exp i (β k − β j )z + i ∑ Ak− K kjt − K kjz exp − i (β k + β j )z
k
]
k
2.21
dA −j
dz
(
) [
]
(
) [
= −i ∑ Ak+ K kjt − K kjz exp i (β k + β j )z − i ∑ Ak− K kjt + K kjz exp − i (β k − β j )z
k
]
k
2.22
may be simplified by retaining only terms that involve the amplitude of the particular
mode, and then making the “synchronous approximation” (Sceats M. G., 1993). Under
such conditions, amplitude A + (z ) and A − (z ) may be simplified to the following
equation (Eggleton B. J., 1994, Malo B., 1993, Andreas Othonos and Kalli K., 1999 and
V. Mizrahi and J. E. Sipe, 1993):
dA +
= iξ + A + ( z ) + iκA − ( z )
dz
2.23
dA −
= −iξ + A − ( z ) − iκ ∗ A + ( z )
dz
2.24
37
ϕ
iδ d z −
2
where A + ( z ) = A( z )e
ϕ
− iδ d z +
2
, A − ( z ) = A( z )e
, κ is an “AC” coupling coefficient
and ξ + is the general “dc” (period-averaged) coupling coefficient defined as (Erdogan,
T., 1997)
ξ + = δd +ξ −
1 dϕ
2 dz
2.25
with δ d being the detuning, which is independent of z and is defined in the following
way:
δd = β −
π
Λ
1
1
δ d = 2πneff −
λ λd
2.26
where λ d = 2neff Λ is the design peak reflection wavelength. The “dc” coupling
coefficient, ξ is defined as (Erdogan T., 1997)
ξ kj ( z ) =
ωnco
2
δnco ( z ) ∫∫ dxdyekt ( x, y )e ∗jt ( x, y )
2.27
core
Absorption loss in the grating can be described by a complex coefficient ξ , where the
power loss coefficient is α = 2 Im(ξ ) . Light not reflected by the grating experiences a
transmission loss of 10 log10 (e )α dB/cm.
The detuning indicates how rapidly the power is exchanges between the radiated
(generated) field and the polarization (bound) field. The factor is proportional to the
inverse of the distance the field travels in the generated mode. A complex coefficient ξ
can be described the absorption loss in the grating. For a single mode Bragg reflection,
the following simplified relations (Iocco A., 1999):
ξ=
2π
λ
δneff
2.28
and
κ =κ∗ =
π
sδneff
λ
2.29
38
For a uniform grating along the z direction, δneff is the index change spatially
averaged over the grating period and is constant and dϕ / dz = 0 (i. e., there is no grating
chirp). Thus κ , ξ , ξ + are constants. This simplifies equations 2.23 and 2.24 into
coupled first-order ordinary differential equations with constant coefficients.
Given the appropriate boundary conditions, a closed-form solution to these
equations can be obtained. For a uniform fiber grating with the length of L the
reflectivity can be determined assuming a forward-propagating wave starting from
z = −∞ , while not allowing the backward propagating waves to exist for z ≥ L / 2 . The
L
A−
2 and the power reflectivity R = ρ
amplitude ρ =
L
A+
2
2
(Iocco A., 1999) as (Andreas
Othonos and Kalli K., 1999):
− κ sinh
ρ=
+
ξ sinh
(κL )
2
(
+
−ξ L
)
2
(κL )2 − (ξ + L )2
2
+ i κ −ξ
+2
(κL )
cosh
2
(
+
−ξ L
)
2.30
2
and
R=
(
If ξ + L
) ≥ (κL)
2
2
(κL )2 − (ξ + L )2
sinh 2
ξ +2
− 2 + cosh 2
κ
(κL )
2
(
2.31
+
−ξ L
)
2
or the sign under the square root is negative, then Equation
2.23 and 2.24 can be written as (Eggleton B. J., 1994 and Claudio O. E., 1996):
ρ=
(ξ L ) − (κL )
2
+
− κ sin
2
ξ + sinh (ξ + L ) − (κL )2 + i ξ + − κ 2 cosh (ξ + L ) − (κL )2
2
2
2.32
2
And
R=
(ξ L ) − (κL )
+ cos (ξ L ) − (κL )
+
− sin 2
ξ +2
− 2
κ
2
2
+
2
2
, respectively
2
2.33
39
Figure 2.14 shows the reflectivity of a uniform Bragg grating calculated from
Equation 2.33 if ξ 2 < κ 2 or ξ 2 > κ 2 for different values of grating length, L and
λ = 946nm . It is interesting to note that for an increasing L, the reflectivity bandwidth
becomes narrower (i.e., longer gratings produce narrower spectral linewidth), as
expected.
Figure 2.14: Reflection spectral response versus normalized wavelength for uniform
Bragg gratings witk κL=2 and κL=10 (Andreas Othonos and Kalli, 1999)
Using Equation 2.33, the maximum reflectivity, Rmax of the Bragg reflection
grating at the line center, 946nm is
Rmax = ρ = tanh 2 (κL )
2
2.34
The maximum reflectivity occurs when ξ + = 0 , or at the wavelength of
λ max = 1 +
δneff
neff
λB
2.35
The index of refractive of a Bragg grating having a periodic refractive index grating is
n( z ) = n0 + ∆n sin
2π
z
Λ
2.36
Where n is the change in the refractive index in fiber core and the coupling coefficient is
given by
40
κ=
π∆n
λB
2.37
Substituting Equation 2.37 into 2.34 gives the equation for the maximum reflectivity of a
uniform fiber Bragg grating of length as
π∆nL
R = tanh 2
λB
2.38
A bandwidth for the uniform Bragg grating may be defined as the width between the
first zeroes on either side of the maximum reflectivity. Thus for the Equation 2.32
(Andreas Othonos and Kalli, K., 1999),
∆λ0
λ
=
λB
1+
sδn L
eff
sδneff
neff
2
2.39
For the case where the index of refractive change is weak (weak grating limit) sδneff is
very small; thus sδneff << λ B / L and
∆λ0
λ
→
λB
neff L
=
2
N
2.40
which implies that the bandwidth of weak grating is limited by their length. However, in
the case of strong gratings where sδneff >> λ B / L
∆λ0
λ
2.2.2
→
sδneff
2.41
neff
Transfer Matrix Method
The principle behind the transfer matrix method is to subdivide the grating
structure into multiple uniform sections and then identify each section using a 2 by 2
matrix. The information contained in each matrix is specific to the section. The
individual matrices are then successively multiplied along the length of the grating to
describe the behaviour of the entire grating.
41
The first step in this approach is to divide the grating into M uniform matrix
components with Ak+ and B k+ being the field amplitudes after traversing section k. from
the derivation of Equation 2.32, the boundary conditions give the starting point
A0+ = A + (L / 2 ) = 1 and B0+ = B + (L / 2 ) = 0 . The goal is to calculate the amplitude
components of the final matrix AM+ = A + (− L / 2 ) and B M+ = B + (− L / 2 ) . The
propagation each of the sections k is described by a transfer matrix Tk expressed as
follows
Ak+
+
B
k
A+
= Tl k+−1
B
k −1
2.42
Where the transfer matrix Tk is given by
ξ+
κ
cosh
(
L
)
i
sinh(Ω∆L )
Ω∆
−
− i sinh(Ω∆L )
Ω
Ω
Tk =
2.43
+
κ
ξ
i sinh(Ω∆L )
cosh(Ω∆L ) + i
sinh(Ω∆L )
Ω
Ω
where Ω = κ 2 − ξ 2 , ∆L is the length of k th uniform section, κ and ξ are local
coupling coefficients for the kth uniform section. Once the matrices of all the individual
layers are known, the output amplitudes can be calculated from
AM+
A0+
=
T
+
+ ; T = TM ⋅ TM −1 ⋅ K ⋅ Tk ⋅ K ⋅ T1
BM
B0
2.44
The accuracy of the transfer matrix method depends on the number of uniform
sections M used the analysis. A large value of M implies a higher accuracy. However M
cannot be arbitrarily large. The choice of M must be such that the length of each uniform
section, ∆L is sufficiently larger than the grating period (i.e. ∆L =Λ). By implication, M
must be satisfy:
M=
2n eff L
λD
2.45
In the implementation of the transfer matrix method, each section is
characterized by a unique matrix containing information specific to the section. This
makes it possible to apply the technique to non-uniform gratings such as chirped and
apodized gratings. Figure 2.15 demonstrates how the transfer matrix method is applied
42
to uniform and non-uniform gratings. This method can also be applied to phase-shifted
gratings (i.e. gratings with the sections of zero perturbation).
Figure 2.15: Illustration of grating simulation using the transfer matrix method
In such gratings, a phase shift matrix T k is inserted between matrices Tk and
Tk+1 in the matrix product of Equation 2.44. The phase-shift matrix has the form:
e − jφ k / 2
T k =
0
0
e
jφ k / 2
2.46
For two gratings separated by a finite distance d, φ k is defined as
φk
2
=
2πneff
λ
d
2.47
Because of the fiber Bragg grating has an advantage to become ‘partial mirror’
for a Fabry Perot device. Two uniforms FBG is design with a simulation to study the
characteristics of Fabry Perot FBG. To do this a background theory of Fabry Perot is
present in the next section of this chapter.
43
2.3
Fabry Perot Concept
The Fabry Perot filter is an optical resonator that confines and stores light energy
at selected frequencies. This optical transmission system incorporates feedback, whereby
the light is repeatedly reflected within the system and thus circulates without escaping
the system. A simply Fabry Perot filter comprises of two parallel planar mirrors spaced a
fixed distance apart. The rays travelling between the mirrors are kept perpendicular to
the plane of the mirrors via a two-lens system. The lenses are placed outside the mirrors
to serve two purposes: firstly, to establish parallel rays inside the resonance cavity
between the mirrors; and secondly to focus the output light onto the detector following
the Fabry Perot filters.
2.3.1
Historical Background
The Fabry Perot filter was discovered by Charles Fabry and Alfred Perot at the
University of Marseille in 1897. The discovery was a result from work primarily
conducted in the field of electricity and the necessity in the field for precise
measurements of small distances. With this study, Fabry and Perot discovered an optical
phenomenon called resonance that led to the invention of a very useful method of
measuring small distances. In their paper (Fabry C., Perot A., 1897), Fabry and Perot
presented a mathematical model that described the peaks and the throughs of the
resonance fringe pattern obtain from their optical resonator. The paper also presented a
mathematical model for the transfer function of the resonance fringe pattern, based on
Airy’s formula (Airy G. B., 1833).
In early 1899, the work of Fabry and Perot focused on studies in interference that
led to the development of the Fabry Perot interferometer. During that year, Fabry and
Perot published four papers, cited in (Vaughan J. M., 1989), that demonstrated various
application areas where the Fabry Perot interferometer can be useful. In their second
paper in 1899, Fabry and Perot demonstrated the first application of the Fabry Perot
44
interferometer to the field of spectroscopy. In the same year, Fabry and Perot came up
with the concept of coincidence and applied it intensively in their work. They also
extended their studies to observation of interference lines in metallic vapours such as
mercury, cadmium and thallium. For these studies results obtained by Fabry and Perot
were in contrast to those of deduced by Prof. M. M. Michelson (Vaughan J. M., 1989).
In the year 1900, Fabry and Perot devoted their work to investigating various
types of light sources, using interferometric techniques. In this work, they managed to
describe different forms of arc discharge together with absorption filters for isolating
various interference lines (Vaughan J. M., 1989). Fabry and Perot also presented a
catalogue of absolute wavelength measurements in mercury, zinc, silver and copper
obtained using interferometric techniques. In a paper published in the Astrophysical
Journal in 1901, Fabry and Perot presented a new form of interferometer, constructed by
M. Jobin.
The departure of Alfred Perot from Marseille University to Laboratoire d’Essais
in 1901 marked the end of their work together. In the years following 1902, the principle
of interference between two plates had been well established by Fabry and Perot.
Measurement techniques using this principle were rapidly deployed in other laboratories
across Europe, because of the potential of precision associated with the techniques. In
1905, a full technique of photographic recording, attributed to Fabry and Perot was
established and used extensively in many research institution (Vaughan J. M., 1989).
The technique remained dominant for three decades until the introduction of
photoelectric methods in the late 1940s.
In recent years, the Fabry Perot filter has found many uses in sensor and
measurement applications (Yoshino T., et al., 1982). Christensen has demonstrated the
use of the Fabry Perot filter as a temperature sensor using multimode optical fiber
(Christensen D. A., 1974). Valis and his co-workers have reported a Fabry Perot filter
designed from in-fiber mirrors for strain measurement (Valis T., et. al., 1990). In the
medical field the Fabry Perot filter has been useful as a blood pressure and temperature
45
sensor, as demonstrated by Van Brakel (Van Brakel A.,2002). The Fabry-Perot filter has
also found applications in the design of multiplexer systems for local area network
communications systems as reported by Saleh and Stone (Saleh A. A. M., Stone J.,
1989).
2.3.2
Mathematical Model For The Fabry Perot Filter
The Fabry Perot filter consists of two semi-transparent mirrors separated by a
fixed distance as mentioned in above. A monochromatic light wave incident upon a
mirror at an angle normal to the mirror, will experience multiple reflections within the
mirrors without escaping. The intensity distribution of the light travelling between the
mirrors portray a standing wave pattern with regular regions of high and low intensity.
The high and low intensity regions relate directly to the distance between the mirrors.
Figure 2.16 demonstrates the operation of the two planar-mirror Fabry Perot filter.
Figure 2.16: Illustration of operation of the two planar-mirror Fabry Perot filter
There are several approaches that are useful in determining the mathematical
model for the Fabry Perot filter. The first and simplest approach is based on ray optics
(Fry G. A., 1970). This approach examines the geometrical conditions under which the
light wave confined inside the Fabry Perot will exist. The second approach is based on
wave optics where the modes of the resonance frequencies and wave functions of the
optical waves of the Fabry Perot filter are analysed (Hernadez G., 1986). The third
approach to analysing Fabry Perot filters is based on Fourier optics (Duffieux P. M.,
46
1983). This approach investigates the effects of the finite size of the mirrors on the loss
and on the spatial distribution of the modes of the Fabry Perot filter. The fourth and final
approach is based on signal flow graph analysis of layered media (Meyer J., 1993). This
approach uses Mason’s rule to relate input field to the output field of a multilayer
system. The four approaches mentioned above are not mutually exclusive, and the
theories deployed in each approaches may overlap. In this chapter, a mathematical
model for the Fabry Perot filter based on the signal flow graph approach will presented.
This approach is selected due to its clarity and simplicity.
2.3.3
Figures Of Merit
The figures of merit of the Fabry Perot filter are performance criteria that
determine the applicability of the device to a specified design. The figures of merit
provide the framework for specification of design parameters of the filter. Before a
discussion on the figures of merit can be initiated, it is necessary to take a closer look at
equation 2.81. F and θ 3 are the two variables that play a part in altering the properties of
the transfer function of the Fabry-Perot filter. The constrast factor F was already linked
to reflectance of mirrors in equations 2.48 and 2.49. The parameter θ 3 , relating to the
phase change associated with a traversal through layer 3, is yet to be defined.
According to Keiser (Keiser G., 2000), for a standing wave to exist between two
mirrors, as desired for Fabry-Perot operation, the following phase change condition must
hold:
e −2iθ k = 1
2.48
where the angle associated with the phase change is defined as,
θk =
2πnk d k
λ
cos ϕ k
2.49
where cos ϕ k = 1 as per assumption made in section 2.3.2.2. The variables with subscript
k are specific to the properties of the layer k. n is the index of refraction, d is the layer
47
thickness, λ is the free space wavelength of the light wave and ϕ is the incidence angle.
Assuming normal incidence (i.e. ϕ = 0 ) in the cavity, equation 2.48 holds when
2πnd
2
= 2πm
λ
2.50
where m is an integer that defines the order of the transmission peaks existing in the
Fabry-Perot filter. Since the free space wavelength is linked to the frequency via the
speed of light c (i.e. c = fλ ), then m can be written as a function of frequency as:
m=
2nd
fm
c
2.51
The various figures of merit discussed in this section affect different properties of the
transmission pattern in Figure 2.17. These figures of merit are Free Spectral Range
(FSR), Minimum Resolvable Bandwidth, Finesse and Contrast Factor.
Figure 2.17: Transmission of the Fabry Perot filter as a function of frequency. Adjacent
fringes are equally spaced in frequency
a. Free Spectral Range (FSR)
The free spectral range of the Fabry-Perot filter is the frequency spacing between
two successive modes of resonance frequency (i.e. frequencies corresponding to
maximum transmission). By considering two successive modes, represented by m and
m-1 we have
48
m −1 =
2nd
f m −1
c
2.52
and
m=
2nd
fm
c
2.53
Subtracting the two equations above yields
1=
2nd
( f m − f m−1 ) = 2nd ∆f FSR
c
c
2.54
and the free spectral range in terms of frequency becomes
∆f FSR =
c
2nd
2.55
The free spectral range in equation 2.55 is related to the wavelength free spectral range
through the relationship,
∆f FSR ∆λ FSR
=
λ
f
2.56
thus the wavelength free spectral range can be written as
∆f FSR =
λ2
2.57
2nd
Equations 2.55 and 2.57 indicate that the free spectral range, as shown in Figure
2.18, is a function of the physical mirror separation d. By accurately setting the variable
d, the Fabry-Perot filter can be designed to a desired free spectral range.
Figure 2.18: Transmission pattern of the Fabry Perot filter indicating free spectral range
and bandwidth resolution as functions of resonance frequency
49
b. Minimum Resolvable Bandwidth
The minimum resolvable bandwidth ∆f FWHM , also known as the fringe width or the
resolution bandwidth, is the width (i.e. full width at half maximum peak intensity) of the
standing wave generated during the operation of the Fabry Perot filter. The minimum
resolvable bandwidth is an important figure of merit in the design of Fabry Perot filters.
Low values of ∆f FWHM are often desirable in the design of these devices. The minimum
resolvable bandwidth relates to both the reflectance of the Fabry Perot mirrors and the
mirror separation. This figure of merit is set by the designer during the design process of
the Fabry Perot filter.
c. Finesse
The finesse is an important parameter that determines the performance of a Fabry
Perot filter. Conceptually, finesse can be thought of as the number of beams interfering
within the Fabry Perot cavity to form the standing wave. A higher finesse value indicates
a greater number of interfering beams within the cavity, and hence a more complete
interference process. In its simplicity, the finesse is defined as the ratio of the free
spectral range and the minimum resolvable bandwidth as,
Fr =
∆f FSR
∆f FWHM
2.58
The primary factor that affects finesse is the reflectance R of the Fabry-Perot
mirrors, which directly affects the number of beams circulating inside the cavity. The
finesse as a function of the reflectance is defined as (Saleh B. E. A., Teich M. C., 1991)
Fr =
π R
2.59
1− R
Equation 2.59 indicates that the finesse can be increased simply by increasing the
reflectance of the mirrors. However, the consequence of this increase in reflectance
results in the reduction of light transmitted by the Fabry-Perot filter. Figure 2.19 shows
the effect of finesse on the transmission of the Fabry-Perot filter. In addition to the
50
mirror reflectance, other factors that affect the finesse include the mirror surface quality,
temperature variations and loss factors associated with the design.
d. Contrast Factor
The contrast factor F, is another figure of merit that is important for the design of
Fabry-Perot filters. The contrast factor is defined primarily as the ratio of the maximum
to minimum transmission (i.e. the ratio in the intensity transmission values of the peaks
and the throughs shown in Figure 2.19) as follows:
Figure 2.19: Variation of transmission intensity of the Fabry Perot filter for different
values of finesse
F=
Tmax
Tmin
2.60
Like the finesse, the contrast factor is directly related to the reflectance of the
Fabry Perot mirrors. The contrast factor defined as a function of the reflectance of the
mirrors is,
2
(
1 + R)
F=
(1 − R )2
≈
4R
(1 − R )2
2.61
51
Equations 2.59 and 2.61 indicate that the contrast factor and the finesse are closely
related. It should therefore be possible to define the contrast factor as a function of the
finesse. The relation between these two figures of merit is as expressed in equation 2.62:
2F
F = 1+ r
π
2
2.62
Equation 2.62 indicates that the contrast factor and the finesse are directly proportional
to each other. The equation also shows that a linear increase in finesse, translates into a
quadratic increase in the value of the contrast factor.
2.4
Motor Driven Tunable Filter
The tunable filter is designed to deliver narrow spectral widths. A narrow
wavelength source particularly desirable for testing high-speed fiber optics
communications systems. For example when chromatic dispersion broadens the pulse of
the digital waveform, a limit is imposed on the achievable modulation bandwidth of a
system. The narrow wavelength signals produced by the Motor Driven Tunable filter can
be used to test fiber optic components or systems that vary in performance with respect
to wavelength.
The tunable filter, controlled by a stepper motor, provides high-speed and highresolution. The equipment is calibrated for a specific wavelength range. In singlemode
fiber applications, light from the source fiber is collimated into a beam diameter of
approximately 0.4 to 0.6 mm, within a specific wavelength range. The width of the beam
depends on the lens, wavelength, and numerical aperture of the fiber. When the beam
passes through the filtering element, only a very narrow range of wavelengths are
allowed to pass.
The working principle of the filter is quite simple. Light from the source fiber is
collimated into a beam approximately 0.4 to 0.6mm in diameter. The filter element
rotates to pass the wavelength required. A precision stepper motor, through a reduction
gear assembly, controls the angle of the filter.
52
The simplest bandpass filter has a single dielectric layer with a thin-film coating
on one surface. More complex filters can have multiple layers and coatings. Vapor
deposition techniques are typically used to control the composition and thickness of the
layers and films to control both the bandwidth and the center wavelength of the filter. As
the angle of the filter increases, so does the optic path length. As a result, the wavelength
of light that can pass through the filter varies according to the angle. Figure 2.20 shown
the path the light takes from the source to the exit. A lens collimates light into a beam
that enters the tunable filter. The filter can be tilted to an angle, to tune the output light to
a specific center wavelength. A focusing lens is then used to deliver light into an output
fiber. In Figure 2.21 shown the spectrum of a broadband source after filter by this
eguipment.
Unwanted wavelengths
Angle of reflection
Collimating lens
Focusing lens
collimated
incident light
selected
wavelength
Source fiber
Exit fiber
Angle of incidence and angle of rotation
Figure 2.20: Motor Driven Tunable Filter Operation
Figure 2.21: Motor Driven Tunable Filter Spectrum
CHAPTER 3
METHODOLOGY
3.1
Introduction
Before the research flow are designs to make the interrogation unit system, a
concept or idea of how the interrogation unit work must be understood. The most
important parameter to interrogate is the FBG lambda Bragg, λB.The lambda Bragg is
actually is a reflection wavelength of the resultant Bragg reflection from the fiber optic
grating. Because the lambda Bragg is response to the displacement of the grating, it is
used for the application of fiber optic sensor normally on strain and temperature.
Strain and temperature is a physical effect to the fiber optic that makes the fiber
stretching. The stretch will make a displacement of grating become bigger and
eventually will make the lambda Bragg differ from before the stretching begins. The
sensing response of lambda Bragg to the effect of fiber optic stretching (strain) is linear
shown in Figure 3.1. From this phenomena the FBG sensor technique is born but it also
arise the new problem in the optical system on how to detect the lambda Bragg.
Conceptually there are two ways to get the lambda Bragg, one from the transmission
spectrum of FBG and the other one from the reflection spectrum of FBG.
54
Bragg Wavelength
S/T
Figure 3.1: FBG Strain/Temperature Characteristics
Consider the simple experimental setup had been build by using broadband
source, 50/50 coupler and FBG. The transmission spectrum is detected by optical
spectrum analyzer like Figure 3.2(a) and the reflection spectrum Figure 3.2(b).
(a)
(b)
Figure 3.2: (a)Transmission spectrum of FBG; (b)Reflection spectrum of FBG
In the Figure 3.2, lambda Bragg is in a spectrum of red dot. To get the lambda
Bragg in transmission spectrum Figure 3.2 (a) the lambda Bragg is in a lowest power
(notch) in the original broadband spectrum and in the reflection spectrum it is a peak
power in the broadband spectrum. Theoretically in the reflection spectrum the
reflectlection spectrum ideally is a peak power only (read dot) but in reality the small
55
broadband spectrum like is also detected. This is due to the crosstalk in the 50/50
coupler come from the broadband source. To minimize this crosstalk (optical noise) in
each unjoint optical port, attachment of the index-matching gel (IMG) is required.
3.2
Detection Concepts
Consider the reflection spectrum from the Figure 3.2 (b), the interrogation
system can be designed to use the second FBG that will be tuned to get the lambda
Bragg. This FBG is called TFBG (tuned FBG) because a known strain is applied to the
FBG to stretching it to shift the lambda Bragg until the lambda Bragg from FBG occurs.
From this, the equal strains that are stressing the FBG are obtained by looking at the
applied strain to TFBG. This setup is shown in Figure 3.3 below.
Figure 3.3: Detecting lambda Bragg by TFBG looking to the transmission TFBG
The working principle of the setup shown in Figure 3.3 determined the lambda
Bragg with the lowest voltage (lowest optical power) measure by oscilloscope. Consider
that when the TFBG tuned to different lambda Bragg differ from lambda Bragg of FBG
sensor, the TFBG will pass almost all the narrowband spectrum. But when the both FBG
and TFBG is in the same lambda Bragg the narrowband peak will be reflected by TFBG
resulting the photodetector (PD) detecting the spectrum without the narrowband peak.
Although the setup will work conceptually but in reality there is an optical noise
that disrupts the spectrum and making hard to detect the lowest optical power receive by
photodetector. This optical power is a lambda Bragg. This setup is modified instead of
56
detecting the transmission TFBG it is better to detect the reflection TFBG as shown in
Figure 3.4.
Figure 3.4: Detecting lambda Bragg by TFBG by looking to the reflection TFBG
The same operational concept is applied to Figure 3.4 system as Figure 3.3. The
only different in this system is the highest optical power is a power of the lambda Bragg.
This is happen when TFBG and FBG tuned to the same lambda Bragg the reflection
spectrum from the FBG is reflected again by TFBG giving the photodetector the highest
power. If the TFBG is tuned to the different wavelength the only power detected by
photodetector is the power of the edge of the peak power.
These setups acting as if it imitates the tuneable wavelength filter as discuss in
chapter 2. It is a best setup because it will give the original reflection spectrum reflected
by the FBG sensor with a little power losses to the system. The red dot can be replaced
or equal to motor tunable filter as used in later experiment in this thesis.
Also the FBG used as a TFBG must have a requirement to become the
wavelength filter or interrogator. It should at least have a lambda Bragg bandwidth
smaller than FBG sensor lambda Bragg bandwidth. The smaller the bandwidth will
make a better interrogator because of the high precision and high resolution the system
can achieved. The bandwidth for FBG is usually 0.16 to 0.18 nm. To achieve lowest
bandwidth a new method is applied to FBG by making the Fabry Perot device using two
FBG in the fiber optic that is called FPFBG (Fabry Perot Fiber Bragg Grating). This
FPFBG believe to achieve high resolution bandwidth of FBG depending on the larger
distance between two FBG.
57
3.3
Complete FBG Interrogation System
Figure 3.5 shown below are complete setup for interrogation unit. Computer will
tune the wavelength and detected all the optical power. Achieving the highest optical
power will define the Bragg wavelength and finally the strain or temperature sense by
FBG sensor can be obtained.
Coupler 3dB
B ro a d b a n d
S o u rc e
FBG
Optical
Part
MTF
FP
Collecting
Data
Control
Serial Port
(RS-232)
Electronic
Part
In te rfa c e
C a rd
Figure 3.5: Complete Interrogation Unit System
There are a lot of method to analyze the data but the one consider in this research
must be low cost, efficient and fast among those all. The setup shown in Figure 3.6
shown the detecting unit build using tunable laser source (TLS), 50/50 Coupler, FBG
sensor, photodetector (PD), interface card and computer.
3dB Coupler
FBG
PD
Computer
Figure 3.6: Detecting Unit Using Tunable Laser Source As a Wavelength Varies
58
As discuss in the previous chapter the uniform FBG sensor will filter out some
wavelength according to strain and temperature. The FBG will pass out all wavelengths
except the one it filter through transmission spectrum and reflected back the one it filter.
The operation of this setup begin when the computer control the wavelength that TLS
produced. The laser light will pass through the 50/50 coupler and the FBG sensor. If the
laser wavelength is not the same as the wavelength that the FBG filter, most of the laser
intensity goes to transmission.
The reflection is vice versa to transmission. It is then detected by photodetector
and then the analog signal converted to digital by Analog Digital Converter (ADC) in
the interface card to record the data in the computer memory along the wavelength
control that produce by TLS.
This system has the disadvantage of the cost of TLS in the range of Near InfraRed (NIR) region with a wavelength of 1300 nm, so the whole system must be replaced
by a new effective one. Instead of using the source that can vary wavelength the new
approach using broadband source and the detection system using optical wavelength
filter such as thin film Fabry Perot filter or FBG itself.
3dB Coupler
FBG
PD
Computer
Figure 3.7: Interrogation by Broadband Source And Motor Driven Tunable Filter
Figure 3.7 shown another way to make the detecting unit using broadband source
and Motor Driven Tunable filter as a wavelength scanner. A broadband source – Edge
Light emitting Diode (ELED) give a broadband spectrum in Gaussian shape.
59
The system is illuminated using a broadband source, such as an edge-emitting
LED, superluminescent diode, or superfluorescent fibre source. The Bragg wavelength
of Fibre Bragg Grating (FBG) sensor must be in the range of broadband source
bandwidth (Kersey A. D. et. al., 1992).
Then the FBG will filter certain wavelength and reflect back to coupler and scan
by Motor Driven Tunable filter. The computer scan the whole spectrum according to
computer needed value and in this research it is scan from wavelength 1269.60nm to
1310.40nm. All the spectrum intensity value is recorded using photodetector and
converted to binary using ADC in the interface card.
3.4
FBG Calibration
For the preliminary study, a Fiber Bragg Grating Sensor is being calibrated by
strain response. These experiments conclude there a response of wavelength filter
known as Bragg wavelength (λB) to the change of temperature and strain. The response
function from this experiment is a main component in this study to relate the wavelength
detected by the system with strain.
In the Figure 3.8 shown a setup for uniform Fiber Bragg Grating calibration with
respect to strain sensing. A strain is imposed to FBG within two stages, which is one that
is stationery and the other is a movable stage. The movable stage can be move in a
micrometer region using micrometer to adjust the plate.
60
Broadband
Source
FBG
Fix Stage
Movable
Stage
OSA
Figure 3.8: Detecting Unit Using Broadband Source
In the experiment a small displacement can be determined using FBG as a very
sensitive sensor. The calibrations shown in Figure 3.8 finally give a result such as shown
in Figure 3.1. The linear equation of the response of FBG to strain and temperature are
obtained.
3.5
Calibration Interrogation System
Detecting unit consist of two major hardware: Motor Driven Tunable Filter
(MTF) and photodetector (PD).
3.5.1
Motor Driven Tunable Filter
In this work, the main component used is Motor Driven Tunable Filter from OZ
Optics Limited to replace the Fabry Perot Fiber Bragg Gratings (FPFBG) as a
wavelength filter. This is because of the limitation on fabricating this device due to lack
of facilities. Although the FPFBG is fabricate less it has been demonstrated the predicted
of using the FPFBG by simulation as discuss in chapter 4.
Motor Driven Tunable filter is a device to scan the single wavelength (narrowband) from the spectrum of 1269.60nm to 1310.40nm. Each time the equipment is setup
to the certain wavelength, it allow the intensity or power of that wavelength only to pass
through and detected by photodetector. Refer to Table 3.1 for detail parameter of Motor
Tunable Filter. This equipment used in this system to detect a single wavelength at a
time to get the full spectrum of the reflected signal from the FBG sensor. The highest
61
power or intensity in the spectrum is determined for the power of the λB Bragg
wavelength.
Table 3.1: Optical Specifications For Motor Tunable Filter
Parameter
Specification
Insertion Loss
<2 dB for complete device over full tuning range
Line Width
<1.2nm (standard); 0.3nm (optional), at 50% peak
power
Resolution
≤0.1nm
Tunning Range
50nm
Polarization Dependant Loss
≤0.3dB
Power Handling
≤200mW continuous wave
Backreflection Level
35, 40, or 50 dB; 60 dB
Response Time
1nm change in<0.1s
50nm change in <1.0s
Motor Tuneable Filter is control using default serial port communication
software in Windows XP known as Windows® Hyper Terminal. Figure 3.9 shown the
experimental setup on how the motor tunable filter is being calibrated.
Optical
Spectrum
Analyzer
Computer
Figure 3.9: Calibration of Motor Tunable Filter
To call the HyperTerminal Program enter the “hypertrm” in the run dialog box. It
will open the HyperTerminal software but before the Motor Tunable Filter can
communicate with the software properly, the RS-232 settings must being input as shown
in Appendix D. The parameter setup in the HyperTerminal configuration dialog box is
shown in Table 3.2 below:
62
Table 3.2: RS-232 Settings
Parameter
Settings
Bits Per Second
9600 baud
Data Bits
8 bits
Parity
None
Stop Bits
1 bit
Flow Control
None
The HyperTerminal software is actually serial port communication based
software. The messages for inputs and output are display by ASCII code to
communicate to other receiver. In this case the receiver is motor tunable filter. So there
are protocol to RS-232 like the ASCII commands are not case sensitive, do not use
spaces before, after, or between a command and a query (?) or numerical data entry
(<n>). With the exception of carriage return (written as <CR>) and line feed pairs used
to terminate commands, white spaces, such as space or tab characters, are not allowed in
any command.
To enter a command, type the command and press carriage return (<CR>). The
unit ignores the line feed, <LF>, in syntax. All RS-232 transmissions from the unit are
terminated by a carriage return and line feed pair at the end of each output line.
Commands send to the unit through the Inter-Intergrated Circuit (I2C) communications
systems are terminated by an I2C STOP condition. Carriage return, <CR>, terminates
commands sent the unit through the Serial Peripheral Interface (SPI) communications
system. When each RS232 command is completed, the unit transmits “Done” to the RS232 port and places a binary 1 in the I2C or SPI output buffer.
When each I2C or SPI command is completed, the unit places a binary 1 in the
I2C or SPI output buffer. When using I2C or SPI, RS-232 receiver line is always
enabled, even through the RS-232 transmitted line can be disabled. This allows the I2C
address or SPI configuration to be changed using the RS-232 interface, if required. At
63
start-up, or following a reset command, the unit transmits a series of strings to the RS232 port to provide the user with information about the configuration of the unit. The
unit provides a first return byte value of 0 in response to an I2C and command after the
unit is reset or immediately after power-up. The three most important commands as an
input to control motor tunable filter are RST, W?, W<nnnn.nn>. Refer to Table 3.3 for
the description of these commands.
Table 3.3: Importants Command Used To Control Motor Tunable Filter
Command
Description
RST
Resets the tunable filter. After the reset completed the device
will return the current tunable filter configuration. Values of
these parameters depend on the configuration of each device.
The “I2C ADDRESS” will only be returned in I2C mode. In
SPI mode, the returned text for the line will be “SPI xy” where
x is the SPI clock polarity (0 or 1)
W?
Returns the present wavelength, in nanometers.
W<nnnn.nn>
<nnnn.nn> represents a wavelength, in nanometers.
It also include with the output message as an error messages or return codes to
give a feedback on its operation. Table 3.4 lists the output message with its description.
64
Table 3.4: Optical Specifications For Motor Tunable Filter
RS-232
Status Description
N/A
Unit is reset and is ready to process commands.
Done
Command complete. Unit is ready to process commands.
N/A
Unit is busy or processing a command.
Error-2
Bad command. The command is ignored.
Error-5
Home sensor error. This is an internal error; return the unit to
factory to repair.
Error-6
Overflow. The requested action causes the unit to exceed its
internal limits and the command is ignored.
Error-7
Motor voltage exceeds safe limits. This message will be
generated if the motor exceeds approximately 15 volts.
Software that been build to replaced the HyperTerminal in order to control it
have an ability to read send ASCII code to the unit and reading the message come from
unit in ASCII code. Usually the high-level language such as C do a process in Decimel
or HEX, so the equation stardard code in motor tunable filter that use ASCII code must
be converted to either of the code. Table 3.5 shows an example of message Done and
Error-2 with the equivalent meaning in decimal and Hex basis.
Table 3.5: Optical Specifications For Motor Tunable Filter
Return Code
RS-232 Return Code Values
Done
ASCII
D
o
n
e
<CR> <LF>
-
-
-
Decimel
68
111
110
101
13
10
-
-
-
Hex
44
6F
6E
65
0D
0A
-
-
-
ASCII
E
r
r
o
r
-
2
Decimel
69
114
114
111
114
45
50
13
10
Hex
45
72
72
6F
72
2D
32
0D
0A
Error-2
<CR> <LF>
65
3.5.2
Photodetector
The photodetector used in this research is PDA400 from THORLABS Inc. The
equipment is an amplified, switchable-gain, InGaAs detector designed for detection of
light signals from DC to 10MHz. A five rotary-position switch allows the user to vary
the gain in 10 dB steps (detail specifications attach in Appendix). A buffered output
drives a 50 Ohm load impedance up to 5 volts.
The light to voltage conversion can be estimated by factoring the wavelengthdependent responsivity of the InGaAs detector with the transimpedance gain (e.g. output
in volts / watt = transimpedance gain (V/A) x responsivity (A/W) ). Maximum output is
10 volts (for high impedance loads) and adjustable gain so that the measured signal level
out of the PDA400 is below 10 volts (5 volts for 50Ω load) to avoid saturation.
In that case an external neutral density filters to reduce the input light level and
for maximum linearity performance when measuring focused beams, fiber outputs, or
small diameter beams. The photodetector exceed a maximum intensity is 10mW/cm2.
This photodetector type support from wavelength of 1000nm to 1600nm, and
according to manufacturer datasheet, the responsivity of this photodetector is almost
linear within the center wavelength of 1300nm as shown in Figure 3.10. In Figure 3.11
shown the calibration setup for this photodetector. The result from the calibration
experiment determine the relationship of intensity in power versus the voltage generate
from the photodetector.
66
Figure 3.10: PDA400 Responsivity
Table 3.6: Photodetector Gain
Gain Switch
Gain(dB)
Transimpedance
Gain x104
Position
(V/A)
1
0
1.5
2
10
4.7
3
20
15.0
4
30
47.0
5
40
150.0
Oscilloscope
Figure 3.11: Calibration Photodetector
There are two main components in this study that need to be calibrated. These
components are broadband source with the peak response 1300 nm and InGaAs detector.
A broadband source had been calibrated by identified each spectrum made by the
equipment dial scale to control the power of light source. Then using InGaAs detector,
the light is detected to get the respective output in voltage. Analysis shows a relationship
67
between powers generated by broadband source and received by detector is linearly
proportional.
A broadband source in this experiment is Edge Emitting LED that has double
heterojunction structure. The emission spectrum of this LED is in the range of 1216 nm
to 1400 nm with peak response at 1300 nm. This light can not be seen by human eye
because the eye is sensitive to light with a wavelength between 400 nm and 750 nm
under daylight conditions, with a peak response at 550 nm (Douglas A. R., 1979).
Because the equipment come with a simple dial button to increase the power, it
must be calibrated to know the spectrum that been generated for the future use with
other optical equipment such as fiber optic sensor like Fiber Bragg Grating (FBG)
(Orthonos Andreas, Kalli Kyriacos, 1999), optical tunable filter and fiber optic coupler.
A common detector used in fiber optic research is InGaAs detector because of its
high responsivity to detect light in the wavelength at the range of 950nm to 1650nm.
The detector only works when voltage is applied to this equipment. Because of the photo
detector sensor is attach in series with fix 50Ω resistance, a voltage drop can be
measured at fix resistance according a voltage divider principle (Floyd T. L., 2004). The
increment of incident light is proportional to the increment voltage drop.
The experiment consists of two main parts. Firstly the calibrations of broadband
source itself are necessary to determine the spectrum as an input to another device. The
dial button in this equipment is divided to nine scales as shown in Figure 3.12. Nine
spectrum are collected for each scale called position one to nine using Optical Spectrum
Analyzer (OSA). Figure 3.13 shows the setup to calibrate the spectrum.
68
4
5
6
3
7
2
8
1
9
Figure 3.12: Broadband Source Dial Button
Single Mode Fiber Optic
Broadband Source
1300nm
Optical Spectrum Analyzer
Figure 3.13: Setup for Spectrum Calibration
The spectrum for each position is marked to get the important points such as the
initial data respond (λSTART), last data response (λEND), peak response (λPEAK) and fullwidth at half maximum (FWHM) linewidths (∆λ) as shown in Figure 3.14 to calculated
power of the spectrum.
The next calibration is to determine the relationship between the detector output
voltage with the power of the spectrum obtain in the previous experiment. Figure 3.15
shows the setup to calibrate the detector.
∆λ
λSTART
λPEAK
λEND
Figure 3.14: Optical Spectrum of Broadband Source
InGaAs Detector
Broadband Source
1300nm
Oscilloscope
Figure 3.15: Setup for Photodetector Calibration
69
The spectrum power and voltage are compared to determine the relationship
between the source and detector. For the detector with resistive element the power is
given by equation 3.1:
P=
V2
R
3.1
Assuming the resistant does not change, the power is proportional to V2 equation 3.2:
P ∝V2
3.6
3.2
Interfacing
In the interfacing project there are three steps that should be done to complete the
task of collecting data. For a first step the task is to control Motor Driven Tunable filter
with the right wavelength value. The software will send the ASCII code to control motor
tunable as explain above.
In the second step is to collect data from photodetector in voltage and convert it
to digital using interface circuit as shown in Figure 3.16. This circuit consist three main
IC (Integrated Circuit) refer to a major electronic process categorize as amplify part,
Analog to Digital Converter (ADC) part and lastly conversion of digital signal level to
serial port digital level.
The step three is developing a software to govern all this process of control the
tunable filter, optical power data collection (in voltage) and processes the information to
get the strain or temperature value. The selection of serial port is consider on the
versatility of the serial port itself and added with principle that this protocol is free and
support maximum speed of 20kBits/sec, appropriate for small data transfer.
RG
+5V INPUT
BB
INA114
1.0uF
BB
ADS1212
10kΩ
DVDD
MAXIM
MAX233
DVDD
6pF
6pF
1.0uF
XTAL
Analog amplification
Analog to Digital Converter
Serial Port RS-232 Logic
Figure 3.16: Serial Port Analog To Digital Interface Circuit
71
3.6.1
Hardware
INA114 is used as amplify in the circuit because of the low cost, general
purpose instrumentation amplifier offering excellent frequency. Its also versatile 3-op
amp design and small size make it ideal for a wide range of applications. A single
external resistor sets any gain from 1 to 10,000. Internal input protection can
withstand up to ±40V without damage (Figure 3.17). The INA114 is laser trimmed
for very low offset voltage (50µV), drift (0.25µV/oC) and high common-mode
rejection (115dB at G=1000). It operates with power supplies as low as ±2.25V,
allowing use in battery operated and single 5V supply systems. Quiescent current is
3mA maximum.
Figure 3.17: INA114 Precision Instrumentation Amplifier
Gain of the INA114 is set by connecting a single external resistor, RG:
G =1+
50kΩ
RG
3.3
72
The 50kΩ term in equation 3.3 comes from the sum of the two internal
feedback resistors. These are on-chip metal film resistors which are laser trimmed to
accurate absolute values. The accuracy and temperature coefficient of the resistors are
included in the gain accuracy and drift specifications of the INA114. The stability and
temperature drift of the external gain setting resistor, RG, also affects gain. RG’s
contribution to gain accuracy and drift can be directly inferred from the gain equation
(3.1). Low resistor values required for high gain can make wiring rsistance important.
Sockets add to the wiring resistance which will contribute additional gain error
(possibly an unstable gain error) in gains of approximately 100 or greater. The output
signal or output can be calculate using equation 3.4
(
V0 = G • V IN+ − V IN−
)
3.4
For part 2 the ADS1212 is used to convert analog to digital. The ADS1212
are precision, wide dynamic range, delta-sigma Analog To Digital (A/D) converters
with 24-bit resolution operating from a single +5V supply. The differential inputs are
ideal for direct connection to transducers or low-level voltage signals. The deltasigma architecture is used for wide dynamic range and to ensure 22 bits of nomissing-code performance. An effective resolution of 20 bits is achieved through the
use of a very low-noise input amplifier at conversion rates up to 10Hz. Effective
resolutions of 16 bits can be maintained up to a sample rate of 1kHz through the use
of the unique Turbo Modulator mode of operation. The dynamic range of the
converters is further increased by providing a low-noise programmable gain amplifier
with a gain range of 1 to 16 in binary steps.
The ADS1212 is designed for high-resolution measurement applications in
smart transmitters, industrial process control, weigh scales, chromatography and
portable instrumentation. Both converters include a flexible synchronous serial
interface that is SPI compatible and also offers a two-wire control mode for low-cost
isolation.
73
The objective of part three in interface circuit is to convert the serial data
signal from ADS1212 to serial port level voltage standard +25V to -25V and it is
done by MAX233.
3.6.2
Data Acquisition and Logic
Data Acquisition is in the interface controlled using software. This software is
developing using C language, a high-level programming language. The logic for the
software operation is shown in the Figure 3.18. When the software is ‘run’ to start the
scanning of Bragg wavelength, λB, the software start up the Motor Driven Tunable
filter to reset to home process. The first wavelength value is 1269.60nm. The
software captured the intensity value from photodetector and stored it in Data Storage
with the wavelength value.
The next process is an increment to wavelength is defined according to userdefined resolution. The lowest increment that the filter works is 0.01nm. If the
wavelength filter is bigger than 1310 nm the software will halt and stop and if not the
software scan again the intensity from the photodetector.
By comparing the intensity value from Data Storage with the new intensity,
the software will select the bigger value. If the new intensity value is bigger then the
value in data storage, a new value is overwrites the data in the data storage and if not
the loop to the wavelength increment is starting again. The process will start again
and again in looping process until the system is stop or the wavelength is bigger than
1310.40 nm.
After the process is stop the software will display the wavelength value that
have the biggest intensity as a Bragg wavelength, λB . This Bragg wavelength, λB is
then placed in the FBG mathematical function to relate to the value of strain or
temperature. The whole system is considerable good because it works with intensity
independent. So, intensity losses in optical joint will have no effect to the Bragg
74
wavelength, λB value. The software is develop using OpenWatcom C/C++ is shown
in Figure 3.19.
Start
Wavelength
1269.60nm
Scan PD
Scan PD
Compare PD
Value with
Storage Value
PD > Storage ?
Data
Storag
e
Yes
No
Increment to Next
Wavelength
Check λ > 1310.40nm ?
No
Yes
Program Stop
Figure 3.18: Programming Flow Chart to Detect Maximum Amplitude
75
Figure 3.19: Software FBG Visulation System
CHAPTER 4
RESULTS AND DISCUSSIONS
4.1
Introduction
This chapter presents the experimental and simulation results obtained in each
process to achieve the research objective as described in chapter 1. The arrangements of
the sub topic in this title follow the experimental arrangement in chapter 3. Each
experiment results are related and coherent to the research objective in order to develop
and design the interrogation unit for FBG sensor system that working in the wavelength
region of 1310nm. For the initial part most of the topic concerning in the calibration of
optical components and system as well as electric components. This is crucial to determine
the important parameter control the effect of optical properties such as average power and
wavelength. In the middle topic discuss and describe the result of the interrogation unit
system that are develop and some of the important part such as wavelength filter (Fabry
Perot FBG) that have been fabricated and simulated. And for the title sub topic explain the
operational of the system and performance.
4.2
Calibration of Broadband Source and Photodetector
There are nine dial position of broadband source with each position is referred as
position 1 to position 9. Figure 4.1 shows the spectrum in each dial position. Table 4.1 list
important parameters for each spectrum such as start (λSTART), end (λEND), peak (λPEAK)
and full-width at half maximum (FWHM) linewidths (∆λ).
77
(a): Power spectrum at Position 1
(b): Power spectrum at Position 2
(c): Power spectrum at Position 3
(d): Power spectrum at Position 4
(e): Power spectrum at Position 5
(f): Power spectrum at Position 6
78
(g): Power spectrum at Position 7
(h): Power spectrum at Position 8
(i): Power spectrum at Position 9
Figure 4.1: Spectrum power of each dial Position; (a) to (i)
The power of each spectrum was calculated by integration of the spectrum form or
area under the spectrum graph. So the power can be sum from data λSTART to λEND.
79
Table 4.1: Important Mark in Spectrum
Position
Start
Peak
End
(λ±0.5)nm
(λ±0.5)nm
(λ±0.5)nm
FWHM
(∆λ ±0.9)nm
Power
(P±0.0009)x
10-5
Watt
1
1238.9
1312.2
1387.3
47.5
4.9863
2
1238.9
1311.8
1386.0
46.8
5.1682
3
1237.6
1311.8
1386.4
47.1
5.3061
4
1237.1
1310.9
1387.3
46.8
5.6358
5
1235.8
1311.3
1386.9
46.8
5.9027
6
1233.0
1310.0
1386.9
46.6
6.8496
7
1221.7
1304.1
1394.1
46.4
16.9616
8
1215.4
1301.8
1399.1
47.3
26.9027
9
1216.3
1302.7
1400.0
47.0
26.1296
After an enormous data test and fitting, these data is best fit with Lorentzian
function describe as:
f (x ) =
a
,
1 + bx 2
(
)
4.1
Where a and b is a variable obtain for each data after fitting with the Equation 4.3. To fit
with this equation, a data must be offset peak wavelength to 0. The offset don’t do any
change to total power because the total power is area below the graph or mathematically
describe as an integration of the function. The result for the fitting is shown in Table 4.2
with detail of the value of a, b and its fitting error.
80
Table 4.2: Value a and b of Lorentzian Equation To Fit Spectrum Data
Position
Final set of parameters
gx10
1
2
3
4
5
6
7
8
9
-4
Asymptotic Standard Error
±gx10-6
g%
a
= 2.27425
1.741
0.7654
b
= 25.2474
56.06
2.22
a
= 2.38339
1.695
0.7113
b
= 25.7662
53.16
2.063
a
= 2.44790
1.712
0.6992
b
= 25.8216
52.32
2.026
a
= 2.60308
1.936
0.7436
b
= 25.9602
55.90
2.153
a
= 2.73421
1.867
0.6828
b
= 26.0723
51.52
1.976
a
= 3.18549
2.285
0.7172
b
= 26.3545
54.63
2.073
a
= 8.01811
6.071
0.7571
b
= 27.2829
59.33
2.175
a
= 12.6899
9.765
0.7695
b
= 27.1407
59.85
2.205
a
= 12.2966
9.245
0.7518
b
= 26.9766
58.13
2.155
From Table 4.2, a fitting graph for each of the nine positions is plotted and is
shown in Figure 4.2.
81
(a): Power spectrum at Position 1
(b): Power spectrum at Position 2
(c): Power spectrum at Position 3
(d): Power spectrum at Position 4
(e): Spectrum at Position 5
(f): Spectrum at Position 6
82
(g): Power spectrum at Position 7
(h): Spectrum at Position 8
(i): Power spectrum at Position 9
Figure 4.2: Power spectrum at each nine positions
The green graph is from an experimental data and the red graph is a fitting graph. From the
Lorentzian function (Equation 4.1), an integration of the function will give the total power:
PT = ∫ f ( x)dx = ∫
x1
x2
a
dx
1 + bx 2
(
)
From the standard integration formula;
4.2
83
∫ (e
2
1
1
cx
dx = arctan
2 2
ce
+c x
e
4.3
)
Compare (Equation 5.4) and (Equation 5.5) will give:
1
e2 = 1 , c2 = b , c = b 2
4.4
Then combine (Equation 5.4), (Equation 5.5) and (Equation 5.6) will give the equation for
total power
x1
12
b x
x1
1
1
PT = a ∫
dx = a 1 arctan
x2 (1 + bx )
1
b 2
x2
4.5
The result for the power in every position is shown below in the Table 4.3.
Table 4.3: Total Power
Position
Power From
Measure Power
Equation
by OSA
(miliWatt)
(miliWatt)
1
0.011846679
0.01168
2
0.012292015
0.0121
3
0.012643207
0.01241
4
0.01343755
0.01317
5
0.014106195
0.01378
6
0.016415382
0.01597
7
0.041501964
0.03927
8
0.066453359
0.06217
9
0.064560444
0.06039
84
Optical Power Versus Position
Power (mW)
0.07
0.06
0.05
0.04
0.03
0.02
0.01
0
0
2
4
6
8
10
Dialed Position
Figure 4.3: Spectrum for nine dialled positions
In this experiment finally we get the Lorentzian model describing the power optical
spectrum power of the broadband source. Although the Lorentzian function does not fit
exactly as the data, it uncertainty error only below 3% and can be consider best fit. Figure
4.3 shows that the total power from the equation almost the same for a dialled position 1 to
9. For the dialled position 7, 8 and 9 the value for the total power calculated by equation is
a little bit higher than the power measure using optical spectrum analyszer. This is due to
the assumption of the mathematical model to get the total power from the equation that all
of the broadband components power is calculated but actually the power that have been
measure is an average power of the broadband spectrum not the addition of each individual
power of each wavelength in the broadband source.
For the experiment to get the relationship of the optical power correspond to the
electronic power represent by V2 as mention earlier in Equation 4.1 and 4.2. The InGaAs
photodetector is been calibrated using oscilloscope repeated with the change of five
85
detector amplifier gain as shown in Table 4.4. The operational power of the detector is 5
Watt (5 VDC, 1 A) and amplify supply voltage is 12Volts (0.2A).
Table 4.4: Toggle Position of Broadband Source versus Output of InGaAs Detector
Position
Gain 0 dB
Gain 10 dB
Gain 20 dB
Gain 30 dB
Gain 40 dB
(Volt)
(Volt)
(Volt)
(Volt)
(Volt)
1
0.1560
0.4695
1.435
4.375
10.602
2
0.1560
0.4710
1.440
4.385
10.602
3
0.1600
0.4815
1.470
4.525
10.606
4
0.1675
0.5035
1.550
4.815
10.620
5
0.1765
0.5365
1.640
5.030
10.629
6
0.2035
0.7125
2.055
6.220
10.643
7
0.5070
1.285
4.080
10.634
10.661
8
0.7375
2.165
7.035
10.666
10.661
9
0.7380
2.295
7.050
10.666
10.661
Table 4.5: Voltage Output from InGaAs Detector
Voltage
V2
(± 0.0005)Volt
(±0.001)
1
0.1560
0.024
2
0.1560
0.024
3
0.1600
0.026
4
0.1675
0.028
5
0.1765
0.031
6
0.2035
0.041
7
0.5070
0.257
8
0.7375
0.544
9
0.7380
0.545
Position
To get the relation ship between optical power and electronic power, Table 4.3 and
Table 4.5 is been plotted versus the position as shown in Figure 4.4. Figure 4.4 shows
86
a comparison between spectrum power versus dial position and V2 versus dial position.
Both curves change in a similar pattern.
2
V versus Position
Power (Watt)
Integration Power versus Position
3.00E-04
0.60
2.50E-04
0.50
0.40
2.00E-04
1.50E-04
V
2
0.30
1.00E-04
0.20
5.00E-05
0.10
0.00
0.00E+00
0
1
2
3
4
5
6
7
8
9
0
1
2
3
(a): Power versus Position
4
5
6
7
8
9
Position
Position
(b): V2 versus Position
Figure 4.4: Comparison between graph (a) and (b)
The variables of spectrum power and electric parameter, V2 react in the linear function.
From equation 4.2, it can be written,
P = MV 2 + C
4.6
The symbol of M is a linear slope and C is axis y-interception. So, the power versus V2 is
plotted and shown in the Figure 4.5. Using the linear least square method to fit the data the
equation of the line is given by:
P = (41 ± 1) × 10 −5 V 2 + (46 ± 4) × 10 −6
4.7
87
2
Integration Power versus V
Power (Watt)
3.00E-04
2.50E-04
2.00E-04
1.50E-04
1.00E-04
5.00E-05
0.00E+00
0
0.1
0.2
0.3
2
V
0.4
0.5
0.6
Figure 4.5: Integration Power versus V2
The relationship of power spectrum and V2 (square detector voltage) is in linear
function with regression of 99.6 %. Calibration constant for the experiment setup with the
broadband source and the InGaAs detector is M = (41 ± 1) x10-5. The sensitivity of the
detector is given by the value of C = (46 ± 4) x10-6 Watt for the particular detector setting.
4.3
Calibration of Motor Driven Tunable Filter
The purpose for calibration of Motor Driven Tunable filter is to determine whether
this motor tunable filter at the right wavelength it should be. In Figure 4.6 shown the
broadband spectrum and the picture impose with spectrum after filtering. In Table 4.6
show the result of the wavelength tuned by Motor Tunable Filter and the wavelength given
by Optical Spectrum Analyzer. Delta is a wavelength different between wavelength OSA
and wavelength motor tunable filter. The graph indicate that there are constant power
losses between the wavelength, λ= 1269.60nm to 1303.26nm and above these power value
the power losses is almost 0 until it reach a wavelength of λ= 1310.40nm.
88
Figure 4.6: Spectrum of Broadband Source Imposed with Spectrum Filtered by Motor
Driven Tunable Filter (λ=1269.60nm to 1310.40nm)
Table 4.6: Wavelength Different Between The Wavelength Tuned by Motor Tunable
Filter and Wavelength Detected by OSA
No.
wavelength MTF (±0.01)
nm
wavelength OSA (±0.01)
nm
Delta (±0.02)
nm
1
1269.60
15.12
2
1270.62
1284.72
1285.68
1286.64
1287.28
1288.24
1288.88
1289.84
1290.48
1291.44
1292.08
1293.04
1293.68
1294.32
1295.28
1296.24
1296.88
1297.52
1298.48
1299.12
3
1271.64
4
1272.66
5
1273.68
6
1274.70
7
1275.72
8
1276.74
9
1277.76
10
1278.78
11
1279.80
12
1280.82
13
1281.84
14
1282.86
15
1283.88
16
1284.90
17
1285.92
18
1286.94
19
1287.96
15.06
15.00
14.62
14.56
14.18
14.12
13.74
13.68
13.30
13.24
12.86
12.48
12.42
12.36
11.98
11.60
11.54
11.16
89
20
1288.98
21
1290.00
22
1291.02
23
1292.04
24
1293.06
25
1294.08
26
1295.10
27
1296.12
28
1297.14
29
1298.16
30
1299.18
31
1300.20
32
1301.22
33
1302.24
34
1303.26
35
1304.28
36
1305.30
37
1306.32
38
1307.34
39
1308.36
40
1309.38
41
1310.40
1299.76
1300.72
1301.36
1302.00
1302.96
1303.60
1304.24
1304.88
1305.84
1306.48
1307.12
1307.76
1308.40
1309.04
1309.36
1310.00
1310.64
1310.96
1311.28
1311.92
1311.92
1312.24
10.78
10.72
10.34
9.96
9.90
9.52
9.14
8.76
8.70
8.32
7.94
7.56
7.18
6.80
6.10
5.72
5.34
4.64
3.94
3.56
2.54
1.84
Wavelength OSA vs Wavelength MTF
Wavelength OSA (nm)
1315.00
1310.00
1305.00
1300.00
1295.00
1290.00
1285.00
1280.00
1260.00 1270.00 1280.00 1290.00 1300.00 1310.00 1320.00
Wavelength MTF (nm)
Figure 4.7: Relationship of the Wavelength OSA and Wavelength MTF
90
Plotting the Table 4.6 give the result shows in the Figure 4.7 and Figure 4.8. From
a wavelength of 1270 nm to 1300 nm, the response of the motor tunable filter and
wavelength OSA is linear. The motor tunable filter can be used directly from this range
only, but after this wavelength range a correction factor is needed. The different
wavelengths give by these equipment because of the factory setting and calibration. It
cannot be calibrated or adjusted by user. Although we can do nothing to readjusted the
equipment setting a study of the calibration is crucial to know the equipment response.
As seen in Figure 4.7 the wavelength tuned by the Motor Tunable Filter to the
wavelentgth given by Optical Sectrum Analyszer is almost linear with the regression of
99.36% linearity. The different of each wavelength represented in Figure 4.8 with the
tested number shown in Table 4.6. The delta or wavelength different is dropped trend with
the increasing of the tested number. The relationship equation is not needed here because
the different in wavelength is depend on discrete wavelength that are tuned.
Delta
Delta vs Tested Number
16
14
12
10
8
6
4
2
0
0
10
20
30
40
50
Tested number
Figure 4.8: Wavelength Different of Each Wavelength Tested
91
4.4
Evaluation of The System
The real experimental setup for this interrogation system is shown in Figure 4.9
with the software develop to control this system in Figure 4.10.
MTF
COUPLER
INTERFACE
CIRCUIT
BROADBAND
FBG
SOURCE
INDEX SENSOR
MATCHING GEL
Figure 4.9: Experimental Setup for FBG Interrogation System
Figure 4.10: The interrogation system software
92
The system is tested with nine FBG that have a different Bragg wavelength in the
wavelength range of 1270 nm to 1310 nm. The left hand side picture from these Figure
4.11 is a result from Optical Spectrum Analyszer (OSA). On the other hand the right hand
side picture is a result from Motor Tunable Filter. Actually using the software in Figure
4.10 will directly give the Bragg wavelength, but for the purpose on how the Bragg
wavelength is obtained, a manual scanning of the wavelength and its power have to be
done. These data is captured (see Appendix F) and plotted to generate the graph of
spectrum in the right hand side picture.
3.00E-08
P o wer (W att)
2.50E-08
2.00E-08
1.50E-08
1.00E-08
5.00E-09
0.00E+00
1271.5
1272
1272.5
1273
1273.5
1274
1274.5
1282
1282.5
Wavelength (nm)
(a): Spectrum of FBG 1
6.00E-08
P o w er (W att)
5.00E-08
4.00E-08
3.00E-08
2.00E-08
1.00E-08
0.00E+00
1279.5
1280
1280.5
1281
1281.5
Wavelength (nm)
(b): Spectrum of FBG 2
93
6.00E-08
P o w e r (W a tt)
5.00E-08
4.00E-08
3.00E-08
2.00E-08
1.00E-08
0.00E+00
1284
1284.5
1285
1285.5
1286
1286.5
1287
1287.5
Wavelength (nm)
(c): Spectrum of FBG 3
1.60E-08
1.40E-08
P ower (Watt)
1.20E-08
1.00E-08
8.00E-09
6.00E-09
4.00E-09
2.00E-09
0.00E+00
1287
1287.5
1288
1288.5
1289
1289.5
1290
1279
1279.5
Wavelength (nm)
P ow er (W att)
(d): Spectrum of FBG 4
5.00E-08
4.50E-08
4.00E-08
3.50E-08
3.00E-08
2.50E-08
2.00E-08
1.50E-08
1.00E-08
5.00E-09
0.00E+00
1276.5
1277
1277.5
1278
1278.5
Wavelength (nm)
(e): Spectrum of FBG 5
94
7.00E-08
Power (Watt)
6.00E-08
5.00E-08
4.00E-08
3.00E-08
2.00E-08
1.00E-08
0.00E+00
1281
1282
1283
1284
1285
1286
Wavelength (nm)
(f): Spectrum of FBG 6
4.00E-09
3.50E-09
P o w e r (W a tt)
3.00E-09
2.50E-09
2.00E-09
1.50E-09
1.00E-09
5.00E-10
0.00E+00
1280
1280.5
1281
1281.5
1282
1282.5
1283
1283.5
1284
Wavelength (nm)
(g): Spectrum of FBG 7
2.50E-08
P ow er (W att)
2.00E-08
1.50E-08
1.00E-08
5.00E-09
0.00E+00
1269.5
1270
1270.5
Wavelength (nm)
(h): Spectrum of FBG 8
1271
1271.5
95
4.50E-08
4.00E-08
P o w er (W att)
3.50E-08
3.00E-08
2.50E-08
2.00E-08
1.50E-08
1.00E-08
5.00E-09
0.00E+00
1273.5
1274
1274.5
1275
1275.5
1276
1276.5
Wavelength (nm)
(i): Spectrum of FBG 9
Figure 4.11: Spectrum of nine FBG tested using OSA and MTF; (a) to (i)
Nine FBG successfully interrogate by motor tunable filter because of their Full
Width Half Maximum is bigger than the Full Width Half Maximum of motor tunable
filter, 0.1 nm. The entire generated spectrum from the motor tunable filter is identical to
the spectrum from the Optical Spectrum Analyszer except for its Bragg wavelengths have
a different. In Table 4.7 the important parameter from this results is listed down such
Bragg wavelength obtained from OSA, Bragg wavelength from MTF, it standard deviation
and wavelength different. The different result obtained from the OSA compared to MTF is
due to the equipment calibration settings.
Table 4.7: Results of Bragg wavelength from OSA and MTF
No.
Fiber
Bragg Wavelength
(OSA)
± 0.016 nm
Bragg
Wavelength
(MTF) ± 0.1nm
Standard
Deviation
(%)
Wavelength
difference
(nm)
1
2
3
4
5
6
7
8
9
1288.280
1294.368
1298.360
1300.080
1292.420
1296.200
1295.120
1286.195
1290.360
1273.0
1280.8
1285.9
1288.6
1277.7
1283.2
1281.7
1270.3
1275.1
1.2
1.0
1.0
0.9
1.1
1.0
1.0
1.2
1.2
15.3
13.6
12.5
11.5
14.7
13.0
13.4
15.9
15.3
Full
Width
Half
Maximum
± 0.016nm
1.490
1.234
1.548
1.994
3.250
2.019
12.336
0.764
1.345
96
Plotting the graph of Bragg wavelength (MTF) versus Bragg wavelength (OSA) in
Figure 4.12, result the linear trend lines with the linearity of 99.77%. This means that the
OSA and MTF have a same response with only a different justified wavelength value.
y = 1.3153x - 421.7
R2 = 0.9977
Bragg Wavelength (MTF)
1290.0
1285.0
1280.0
1275.0
1270.0
1265.0
1284.000 1286.000 1288.000 1290.000 1292.000 1294.000 1296.000 1298.000 1300.000 1302.000
Bragg Wavelength (OSA)
Figure 4.12: Comparison Bragg wavelength (MTF) with Bragg wavelength (OSA)
To prove the interrogation system is applicable to be used to interrogate the Bragg
wavelength of strain FBG sensor, a system laboratory setup is constructed to achieve this
objective. The strain FBG sensor is applied a control strain using the movable stage to
change the Bragg wavelength as shown in Figure 4.13. The result is obtained as shown in
Table 4.8.
Fixed
Stage
FBG
SENSOR
Movable
Stage
Figure 4.13: Setup of interrogation system used to interrogate the applied strain FBG
sensor
97
Table 4.8: Applied Strain To The Bragg Wavelength
(s ± 0.3) millistrain
Bragg Wavelength (MTF) λBragg ± 0.1nm
No.
1
0.0
1284.7
2
0.7
1285.3
3
1.5
1285.8
4
2.2
1286.2
5
3.0
1286.7
6
3.7
1287.1
7
4.4
1287.4
This result is plotted in Figure 4.14, with the wavelength Bragg versus applied
strain. The result follow the theory of Bragg wavelength FBG change due to physical
effect (strain and temperature) is perfectly linear 99%.
Wavelength Bragg (nm)
1288
y = 0.6086x + 1284.8
1287.5
2
R = 0.9922
1287
1286.5
1286
1285.5
1285
1284.5
0.0
1.0
2.0
3.0
4.0
5.0
Millistrain
Figure 4.14: The Bragg wavelength change due to applied strain
4.5
Simulation of Fabry Perot FBG
In Chapter 2 the use of Fabry Perot FBG is important in the interrogation system
because of the high resolution it can give. Before fabricating it, certain parameters of the
Fabry Perot such as the length of the separation and also the Free Spectral Range, Finesse,
98
Minimum Resolvable Bandwidth and Full Width Half Maximum need to justify. This is
because to matching with this application. A Fabry Perot (FP) device is widely used for
measuring wavelengths with high precision, for studying the fine structure of spectrum
lines and as a high quality optical resonator for the construction of lasers. Because of the
importance of FP, all the technology in fiber optic networks or sensors incorporates this
device either extrinsic or intrinsic.
The characteristics of FBGs allowing reflecting a partial wavelength thus fulfill the
pre-requirement to make an intrinsic FP device. The objective of this study is to design and
fabricate a FP FBGs operating at the wavelength of 1550nm, both theoretically and
experimentally. For the theoretical modeling Coupled Mode Theory (CMT) was used to
design the grating using FBGs (Yariv Amnon, 1973). This theory simulates light
propagation in perturbed or weakly coupled waveguides and is useful in the analysis of the
interaction between several near resonances guided modes occurring fiber optic gratings.
In order to model the Fabry Perot phenomena inside the fiber, a Coupled Mode
Theory (CMT) was used to analyze the dual fiber Bragg gratings separated by the length d
as shown in Figure 4.15. The parameters used in this model to design a Fabry Perot fiber
optic device are: wavelength of 1310nm, grating reflectivity of 0.5 (percent unit), the
speed of light 2.99793 x 108 ms-1, core index of photosensitive fiber 1.47 and length of
gratings 1 cm. This study involves nine separation lengths d between the Bragg gratings as
a manipulative parameter to determine the Fabry Perot characteristics namely free spectral
range ∆fFSR, the minimum resolvable bandwidth ∆fFWHM, finesse and the contrast factor.
d
Uniform Bragg
Gratings
Λ
Figure 4.15: Construction of the Dual Fiber Bragg Gratings as a Fabry Perot Resonator
Figure 4.15 show the illustration of setup and arrangement of the FBGs to make the
Fabry Perot FBG. Matlab® scripts have been used to model the FP-FBGs (Madingoane
99
Kefilwe, 2004). In Figure 4.16 shows the reflection spectrum and transmission spectrum of
this device corresponding to the different values of the separation length d between the two
gratings. Only Figure 4.16 (a) shows the reflection spectrum of all nine devices because
they share the same spectrum. The rest, Figure 4.16 (b) to (j) shows the transmission
spectrum for different value of separation length d of each device. The spectrums have
been analyzed to obtain the Fabry Perot parameter as shown in Table 4.9.
(a)
(b)
(c)
(d)
(e)
(f)
100
(g)
(h)
(i)
(j)
Figure 4.16: Figure shows here (a) reflection spectrum, (b) – (j) transmission spectrum of
a FP FBGs with a separation length 0.5cm, 1.0cm, 1.5cm, 2.0cm, 2.5cm, 3.0cm, 3.5cm,
4.0cm and 4.5cm respectively.
101
Table 4.9: Comparison of six Fabry Perot Fiber Bragg Gratings (FP-FBGs) with different
separation between gratings
FBG
Separation
Free
Minimum
Finesse
Contrast
between
spectral
resolvable
gratings
range
bandwidth
(cm)
(GHz)
(GHz)
1
0.5
20.4
3.38
6.05
9
2
1.0
10.2
1.69
6.05
9
3
1.5
6.80
1.13
6.05
9
4
2.0
5.10
0.844
6.05
9
5
2.5
4.08
0.675
6.05
9
6
3.0
3.40
0.563
6.05
9
7
3.5
2.92
0.482
6.05
9
8
4.0
2.55
0.422
6.05
9
9
4.5
2.27
0.375
6.05
9
According to Figure 4.16 and Table 4.9, the free spectral range and minimum
resolvable bandwidth decrease with the increasing of separation length between two
gratings. The finesse is slightly changed therefore it can be assumed as a contrast that is
not affected by the length of gratings separation. So, in this study the important parameter
of FP-FBGs fabrication are determined in terms of the separation distance between the two
FBG’s gratings. The smallest length for the separation of gratings the better is the
constructed Fabry Perot device. But there are also some fabrication limitations to get the
smallest value depending on the instruments that are used such as FBGs KrF fabrication
unit and the resolution of optical spectrum analyzer.
4.6
Experimental of Fabry Perot FBG
For the fabrication process, the phase mask technique is used to fabricate Fabry
Perot FBGs using Krypton Fluoride (KrF) excimer laser at wavelength 248nm. This
method reduces the complexity, a robust and provides an inherently stable method for
102
reproducing Fiber Bragg Gratings. Figure 4.17 show the spectrum result of the Fiber Bragg
Grating fabricated to be Fabry Perot FBG. In the objective and scope the FPFBG that are
been studies are in the center wavelength of 1310 nm. But because of the equipment
capabilities in the lab does not have the phase mask for fabricating 1310nm. Instead we try
to study the effect of Fabry Perot FBGs in 1550 nm.
(a)
(c)
(e)
(b)
(d)
(f)
103
(g)
(h)
(i)
(j)
(k)
(l)
Figure 4.17: Spectrum of Fabricated Fabry Perot FBG
Table 4.10 show the characteristics and properties of the fabrication of Fabry Perot
FBG. In this table, the fiber 1 and 4 is actually from a single fiber that is fabricated for a
second time to make Fabry Perot FBG. Fiber 1 indicate that the first grating is fabricate
inside the FBG fabrication system. For a Fiber 2 indicate that the grating after the
104
fabrication is finished and the fiber is cooled by the ambient temperature. Fiber 3 indicate
the process of making the second grating of Fabry Perot FBG and lastly for Fiber 4 show
the second grating after the fabrication of FPFBG is finished.
The process is repeated for the next day of a new fiber to make Fabry Perot FBG
as indicate Fiber 5 to Fiber 8. The same process is repeated for a third day with a new fiber
as indicate Fiber 9 to Fiber 12. For a continuously three day of fabrication the only
different is the parameter of Krypton Fluoride laser energy. This happen because KrF gas
used as a laser medium have a life time duration and also the pressure of the gas tank
decease proportional to the lasing that have been used and also with a time period.
Table 4.10: The Characteristis and Properties of Fabrication of Fabry Perot FBG
Fiber
Time
(±1min)
BW
(nm)
1
Pulse
Energy
(±1mJ)
75
44
0.46±0.01
Bragg
Wavelength
(nm)
1552.27±0.01
2
75
44
0.46±0.01
1552.21±0.01
3
71
44
0.46±0.01
1552.2±0.1
4
71
44
0.49±0.01
1552.2±0.1
5
60
56
0.186±0.006
1551.548±0.001
6
60
56
0.402±0.006
1551.566±0.001
7
55
56
0.264±0.006
1551.392±0.001
8
55
56
0.384±0.006
1551.512±0.001
9
62
44
0.228±0.006
1551.338±0.001
10
62
44
0.258±0.006
1551.35±0.01
11
43
40
0.174±0.006
1551.326±0.001
12
43
40
0.33±0.01
1551.35±0.01
Reflectivi FWHM
ty
(nm)
(±0.8)%
90.3
0.18±0.0
1
90.3
0.21±0.0
1
90.7
0.18±0.0
1
90.7
0.19±0.0
1
57.1
0.102±0.
001
57.1
0.066±0.
001
61.6
0.12±0.0
1
61.6
0.108±0.
001
23.4
0.102±0.
001
23.4
0.102±0.
001
84.6
0.072±0.
001
84.6
0.102±0.
001
105
Actually in this experiment the fiber that been prepared to make Fabry Perot FBG
is 10 sample but only 3 successfully fabricate due to the damage in-fabrication. The
damage usually happens at a time the second grating of Fabry Perot FBG is been fabricate.
The design of the equipment make the fabrication of a second grating impossible because
we need to rearrange the fiber to the phase mask in order to make second grating beside
the first grating. Also, the fiber that are strip to remove the fiber buffer leaving the core
and cladding will also making the fiber more fragile to easily break with and a small force.
In term of controlling the uniformity of both grating we make an assumption that
using a same phase mask will give the same characteristics of a grating. But in reality
when rearrange the fabrication of second grating, the apply strain on the fiber cannot being
control. This is because in a theory of the Fiber Bragg Grating is so sensitive to microstrain.
CHAPTER 5
CONCLUSIONS
5.1
Summary of findings
The objective to design and construct a portable high-resolution interrogation
system for Fiber Bragg Grating sensor is achieved in the range of wavelength 1270nm to
1310nm. This system is low-cost and have a simple setup to capture the reflected Bragg
wavelength (directly give the Bragg wavelength value without needing to analyze or
show the whole spectrum) and have a scanning resolution of 0.1 nm. According to the
experiment all nine FBG is successfully interrogate to find it Bragg wavelength because
all of these FBG Full Width Half Maximum is bigger than 0.1 nm.
This system is tested or evaluated with FBG strain sensor by giving the applied
strain, and the expected result of Bragg wavelength is interrogate like using an OSA.
The advantage of using this interrogation system compared to OSA is that it will give a
real time value of Bragg wavelength. The fast scanning provided by this system in
giving the Bragg wavelength value is important to detect the real time data in the field
condition that have a fluctuation of strain response.
In the simulation of Fabry Perot Fiber Bragg Grating, the distance between the
dual FBG is increasing the resolution of Fabry Perot Fiber Bragg Grating to become a
tunable filter. But by increasing the distance between the dual FBG will also increase the
107
loss of power by the distance and grating itself. For the experiment of fabricating a
Fabry Perot Fiber Bragg Grating results with failure because it is hard to maintain the
FBG parameter of Bragg wavelength and reflection power for a fabrication of Fabry
Perot device using identical FBG as a reflection mirror.
5.2
Suggestions and Recommendations
In order to accomplish of high quality and capability of interrogation system for
Fiber Bragg Gratings sensor, some recommendations are suggested here so that
hopefully be the guide to be noted in other future studies.
1) Improved the FBG fabrication unit by implemented the movable stage to
align fiber optic with phase mask. The movable stage must be controlled by
computer.
2) Use a new type of phase mask for fabrication of FBG 1310.
3) Fabrication FBG using excimer laser KrF should be change to other laser
source (i.e. solid state laser or semiconductor laser) because of the need to
use high power, continuous laser and cheaper than excimer laser.
4) Try using any other methods for the interrogation of FBG. Tunable filter also
can design with other interferometric system such as Mach-Zehnder, GreenTwyman, etc.
5) For the electronic part, design a high speed and high resolution analog to
digital conversion circuit.
108
REFERENCES
Airy G.B., (1833). On The Phenomena Of Newton’s Rings When Formed Between Two
Transparent Substances Of Different Refractive Powers, Philosophical Magazine,
vol. 2, pp. 20 – 30.
Andreas Orthonos, Kyriacos Kalli, (1999). Fiber Bragg Gratings Fundamentals And
Applications In Telecommunications And Sensing, Artech House, Inc, pp. 3-6.
Askins. cc., Putnam, M.A , Williams, G M., Friebele, E.J., (1994). Stepped-Wavelength
Optical-Fiber Bragg Grating Arrays Fabricated In Line On A Draw Tower, Opt.
Lett., 19, pp. 147-149.
Ball G.A., Morey W.W., Glen H.W., (1991). Standing –Wave Monomode Erbium Fibre
Laser, IEEE Photonics Technology Letters, vol. 3, pp. 613 – 615.
Berkoff, T.A., Kersey, A.D., (1996). Fiber Bragg Grating Array Sensor System Using A
Bandpass Wavelength Division Multiplexer And Interferometric Detection, IEEE
Photonics Technology Letters, volume 8(11), pp. 1522-1524.
Christensen D.A., (1974). Temperature Measurement Using Optical Etalons, Annual
Meeting of the Optical Society of America.
Coroy, T., Ellerbrock, P.J., Measures, R.M., Belk, J.H. (1995). Active Wavelength
Demodulation Of Bragg Fibre-Optic Strain Sensor Using Acousto-Optic Tunable
Filter, Electronics Letters, volume 31(8), pp. 1602-1603.
Davis, M.A. Kersey, A.D. (1994). All-Fibre Bragg Grating Strain-Sensor Demodulation
Technique Using A Wavelength Division Coupler, Electronics Letters, volume 30(1),
pp. 75-77.
Davis, M.A., Kersey, A.D. (1995). Matched-Filter Interrogation Technique For Fibre
Bragg Grating Arrays, Electronics Letters, volume 31(10), pp. 822-823.
109
Davis, M.A., Bellemore, D.G., Putnam, M.A., Kersey, A.D. (1996). Interrogation Of 60
Fibre Bragg Grating Sensors With Microstrain Resolution Capability, Electronics
Letters, volume 32(15), pp. 1393-1394.
Diminstein, O., Gorbatov, N., Tur, M. (2001). Dispersion-Based Differential
Wavelength Measurements For Bragg Grating Sensors, Electronics Letters, volume
31(1), p.12.
Douglas A. R., (1979). Optoelectronics Devices and Optical Imaging Techniques, The
Macmillan Press Ltd. pp. 126-127.
Duffieux P.M., (1983). Fourier Transform and Its Applications to Optics, 2nd Edition,
John Wiley & Sons Inc., New York (USA).
Eggleton, B.J., Krug, P.A., Poladian, L., Quellentte, F., (1994). Long Periodic
Superstructure Bragg Gratings In Optical Fibers, Electronics Letters, volume
30(19), pp. 1620-1622.
Erdogan T., (1997). Fiber Grating Spectra, Journal of Lightwave Technology, vol. 15,
no. 8, pp. 1277 – 1294.
Fabry C., Perot A., (1897). Sur Les Franges Des Lames Minces Argentées Et Leur
Application A La Mesure De Petites Epaisseur D’air, Annales de Chimie et de
Physique, vol. 12, pp. 459 – 501.
Fallon R. W., Zhang L., Everall L. A., Williams J. A. R., Bennion I., (1998). All-Fibre
Optical Sensing System: Bragg Grating Sensor Interrogated By A Long-Period
Grating, Meas. Sci. Technol. 9, 1969–1973.
Floyd T. L., (2004). Electronics Fundamentals Circuits, Devices and Applications,
Prentice Hall, Inc., pp. 143-149.
Fry G.A., (1970). Geometrical Optics, Springer- Verslag, New York (USA).
Geiger, H., Xu, M.G., Eaton, N.C., Dakin, J.P. (1995). Electronic Tracking System For
Multiplexed Fibre Grating Sensors, Electronics Letters, volume 31(12), pp. 10061007.
Giles C.R. and Mizrahi V., (1995). Low-Loss Add/Drop Multiplexers For WDM
Lightwave Networks, Proceedings of the IOOC’95, Hong Kong.
Grattan K.T.V. and Meggitt B.T., (2000). Optical Fiber Sensor: Advanced Applications
Bragg Gratings and Distributed Sensors, Kluwer Academic Publishers, pp. 79-187.
110
Hamakawa A., Kato T., Sasaki G., Higehara M., (1996). Wavelength Stabilisation In
1.48µm Pump Laser By Fiber Grating, in Proceedings of ECOC’96, Oslo (Norway).
Hecht. E., (2002). Optics, Fourth Edition, Addison Wesley.
Hernadez G., (1986). Fabry-Perot Interferometers, Cambridge University Press,
Cambridge (UK), pp. 1 – 9.
Hill K.O., Fujii Y., Johnson D.C., Kawasaki B.S., (1978). Photosensitivity In Optical
Fibre Waveguides: Application To Reflection Filter Fabrication, Applied Physics
Letters, vol. 32, no. 10, pp. 647 – 649.
Hill K.O., Malo B., Bilodeau F., Johnson D.C., Albert J., (1993). Bragg Gratings
Fabricated In Monomode Photosensitive Optical Fiber By UV Exposure Through A
Phase Mask, Applied Physics Letters, vol. 62, pp. 1035 – 1037.
Iocco A., (1999). Tunable Fiber Bragg Grating Filters, PhD thesis, University Brescia.
Jackson, D.A., Lobo Ribeiro, A.B., Reekie, L., Archambault, J.L. (1993). Simple
Multiplexing Scheme For A Fiber-Optic Grating Sensor Network, Optics Letters,
volume 18(14), pp. 1192-1194.
Jones W.B., (1988). Introduction To Optical Fiber Communication Systems, Harcourt
Brace Jovanovic Inc., Florida (USA), pp. 70 – 122.
Kashyap R., Wyatt R., Campbell R.J., (1993). Wideband Gain Flattened Erbium Fibre
Amplifier Using A Photosensitive Fibre Blazed Grating, Electronics Letters, vol. 29,
pp. 154 – 156.
Kashyap R., (1994). Photosensitive Optical Fibres: Devices And Applications, Optical
Fibre Technology, vol. 1, no. 1, pp. 17 – 34.
Kerser G., (2000). Optical Fiber Communications, 3rd Edition, McGRAW-HILL,
Boston (USA), pp. 25 – 90.
Kersey, A. D., Berkoff, T. A., Morey, W. W., (1992). High Resolution Fiber Bragg
Garting Based Strain Sensor with Interferometric Wavelength Shift Detection,
Electronics Letters, 28, p. 236.
Kersey, A.D., Berkoff, T.A., Morey, W.W. (1993). Fiber-Optic Bragg Grating Strain
Sensor With Drift-Compensated High-Resolution Interferometric Wavelength-Shift
Detection, Optics Letters, volume 18(1), pp. 72-74.
111
Kersey, A.D., Morey, W.W. (1993). Multiplexed Bragg Grating Fibre-Laser StrainSensor System With Mode-Locked Interrogation. Electronics Letters, 29(1) pp. 112114.
Kersey, A.D., Morey, W.W., (1993). Multi-Element Bragg-Grating Based Fibre-Laser
Strain Sensor, Electronics Letters, volume 29(11), pp. 964-966.
Kersey, A.D., Berkoff, T.A., Morey, W.W. (1993). Multiplexed Fiber Bragg Grating
Strain Sensor System With A Fiber Fabry-Perot Wavelength Filter, Optics Letters,
volume 18(16), pp. 1370-1372.
Kersey. A.D., (1994). Interrogation And Multiplexing Techniques For Fiber Bragg
Grating Strain-Sensors, Proc. SPIE., 2071, pp. 3048.
Kersey A.D., Davis M.A., Patrick H.J., Leblanc M., Koo K.P., Askins C.G., Putman
M.A., Friebele E.J., (1997). Fibre Bragg Grating Sensors, Journal of Lightwave
Technology, vol. 15, no.8, pp. 1442 – 1463.
Koo, K.P., Kersey, A.D. (1995). Bragg Grating-Based Laser Sensors Systems With
Interferometric Interrogation And Wavelength Division Multiplexing, Journal of
Lightwave Technology, volume 13(7), pp. 1243-1249.
Lam D.K.W., Garside B.K., (1981). Characterisation Of Single-Mode Optical Fibre
Filters, Applied Optics, vol. 20, pp. 440 – 445.
Lobo Ribeiro, A.B., Ferreira, L.A., Tsvetkov, M., Santos, J.L. (1996). All-Fibre
Interrogation Technique For Fibre Bragg Sensors Using A Biconical Fibre Filter,
Electronics Letters, volume 32(4), pp. 382-383.
Madingoane, Kefilwe, (2004). A Bragg Grating Fabry-Perot Filter for Next-Generation
Broadband Wireless Local Area Networks, Master Dissertation, Rand Afrikaans
University Johannesburg.
Malo, B., Hill, K.O., Bolideau, F., Johnson, D.C., Albert, J., (1993). Point-By-Point
Fabrication Of Micro-Bragg Gratings In Photosensitive Fibre Using Single Excimer
Pulse Refractive Index Modification Techniques. Electronics Letters, volume 29(18),
pp. 1668-1669.
Melle, S. M., Liu, K., Measures, R. M., (1992). A Passive Wavelength Demodulation
System for Guided-Wave Bragg Grating Sensors, IEEE Photonics Technol. Lett., 4,
p. 516.
112
Meltz G., Morey W.W., Glen W.H., (1989). Formation Of Bragg Gratings In Optical
Fibre By Transverse Holographic Method, Optics Letters, vol. 14, no. 15, pp. 823–
825.
Meyer J., (1993). Flow Graph Analysis, Signal Processing And Sensor Applications Of
Fabry-Perot Interferometers, Doctorate Thesis, Rand Afrikaans University,
Johannesburg (SA), November, pp. 20 – 109.
Morey. W.W., Dunphy. J.R., Meltz. G., (1991). Multiplexed Fiber Bragg Grating
Sensors, Proc. SPIE., 1586, p. 216.
Ng W., Walston A.A., Tangonan G.L., Lee J.J., Newberg I.L., Bernstein N., (1991). The
First Demonstration Of An Optically Steered Microwave Phased Array Antenna
Using True-Time Delay, Journal of Lightwave Technology, vol. 9, 1991, pp. 1124–
1131.
Norman D. C. C., Webb D. J., Pechstedt R. D., (2003). Extended Range Interrogation
Of Wavelength Division Multiplexed Fibre Bragg Grating Sensors Using Arrayed
Waveguide Grating, Electronics Letters, November, Vol. 39, No. 24.
Othonos A. and Kalli K., (1999). Fiber Bragg Gratings: Fundamentals and Applications
in Telecommunication and Sensing, Artech House Inc., Boston (USA), pp. 149 –
188.
Rao Y.J., Webb D.J., Jackson D.A., Zhang L., Bennion I., (1996). High-Resolution
Wavelength Division-Multiplexed In-Fibre Bragg Grating Sensor System,
Electronics Letters, volume 32(10), pp. 924-926.
Rochford, K.B., Dyer, S.D. (1999). Demultiplexing Of Interferometrically Interrogated
Fiber Bragg Grating Sensors Using Hilbert Transform Processing, Journal of
Lightwave Technology, volume 17(5), p. 831-836.
Saleh A.A.M., Stone J., (1989). Two Stage Fabry-Perot Filters As Demultiplexers In
Optical FDMA LAN’s, Journal of Lightwave Technology, vol. 7, no. 2, February,
pp. 323 – 329.
Sceats, M. G., Atkins, G. R., Poole, S. B., (1993). Photolytic Index Changes In Optical
Fibres, Annual Review Material Science, Vol. 23, pp. 381-410.
113
Tohmori Y., Kano F. Ishii H., Yoshikuni Y., Kondo Y., (1993). Wide Tuning With
Narrow Linewidth In DFB Lasers With Superstructure Grating (SSG), Electronics
Letters, vol. 29, no. 15, pp. 1350 – 1351.
Valis T., Hogg D., and Measures R., (1990). Fibre Optic Fabry-Perot Strain Gauge,
IEEE Photonic Technology Letters, vol. 2, no. 3, March, pp. 227 – 228.
Van Brakel A., (2002). Blood Pressure Manometer Using A Bragg Grating-Based
Fabry-Perot Interferometer, B.Ing Mini Dissertation, Rand Afrikaans University,
Johannesburg (SA).
Vann L. L., (2003), Ultra Narrow Band Fiber Optic Bragg Grating Filters For
Atmospherics Water Vapor Measurements, Thesis of PhD in the University Of
Arizona.
Vaughan J.M., (1989). The Fabry-Perot Interferometer: History, Theory, Practice And
Applications, ADAM HILGER, Bristol (UK), pp. 1 – 43.
Volanthen, M. Geiger, H. Cole, M.J. Laming, R.I. Dakin, J.P. (1996). Low Coherence
Technique To Characterise Reflectivity And Time Delay As A Function Of
Wavelength Within A Long Fibre Grating, Electronics Letters, volume 32(8), 1996,
pp. 757-758.
Volanthen, M. Geiger, H. Cole, M.J. Dakin, J.P. (1996). Measurement Of Arbitrary
Strain Profiles Within Fibre Gratings, Electronics Letters, volume 32(11), p.10281029.
Weis R. S., Kersey, A. D., Berkoff T. A., (1994). A Four-Element Fiber Grating Sensor
Array with Phase-Sensitive Detection, IEEE Photonics Technology Letters,
December, Vol. 6, No. 12.
Williams J.A.R., Bennion I., Sugden K., Doran N.J., (1994). Fibre Dispersion
Compensation Using A Chirped In-Fibre Bragg Grating, Electronics Letters, vol.
30, 1994, pp. 985 – 987.
Xu, M.G., Geiger, H., Archambault, J.L., Reekie, L., Dakin, J.P. (1993). Novel
Interrogation System For Fibre Bragg Grating Sensor Using An Acousto-Optic
Tunable Filter, Electronics Letters, volume 29(17), pp. 1510-1511.
Yariv, Amnon, (1973). Coupled-Mode Theory For Guided-Wave Optics, IEEE Journal
of Quantum Electronics, pp. 919-933.
114
Yoshino T., Kurosawa K., Itoh K., Ose T., (1982). Fibre Optic Fabry-Perot
Interferometer And Its Sensor Applications, IEEE Journal of Quantum Electronics,
vol. QE-18, no. 10, pp. 1624 – 1632.
Zhang, Q., Brown, D.A., Kung, H., Townsend, J.E., Chen, M., Reinhart, L.J., Morse,
T.F. (1995). Use Of Highly Overcoupled Couplers To Detect Shifts Of Bragg
Wavelength, Electronics Letters, volume 31(6), 1995, pp. 480-482.
115
APPENDIX A
116
APPENDIX B
117
118
APPENDIX C
%This M-file uses the transfer matrix method to evaluate the coupled mode
%equations. The reflection spectrum of the grating and the transmission
%spectrum, delay and dispersion of the fabry-perot filter are simulated
%=========================================================
%Fibre simulation parameters
walD=1.31e-6;
wal1=0.999*walD;
wal2=1.001*walD;
step=500;
wal=[wal1:(wal2-wal1)/step:wal2];
%===========================================
%For a grating of maximum reflectance R = 0.5
Rmax=0.5;
rmax=sqrt(Rmax);
kacL=atanh(rmax);
c=2.99793e8;
h=25e-9;
v=1;
%===========================================
%Implementation of the transfer matrix method for solution of
%coupled-mode equations
nef=1.6;
L=1.0e-2;
M=100;
dz=L/M;
dzo=-L+1.5e-2;
kac=kacL/L;
%"AC" coupling coefficient
kdc=2*kac/v;
%"DC" coupling coefficient
for (r=1:step+1)
w=wal(r);
119
F=[1 0;0 1];
for(s=1:M)
det=2*pi*nef*(1/w-1/walD);
%detuning
gdc=det+kdc;
%"DC" self coupling coefficient
p1=sqrt(kac^2-gdc^2);
%parameter relating the coupling coefficient
p2=gdc^2/kac^2;
f11=cosh(p1*dz)-i*(gdc/p1)*sinh(p1*dz);
%transfer matrix method (start)
f12=-i*(kac/p1)*sinh(p1*dz);
f21=i*(kac/p1)*sinh(p1*dz);
f22=cosh(p1*dz)+i*(gdc/p1)*sinh(p1*dz);
ff=[f11 f12;f21 f22];
F=ff*F;
%transfer matrix method (end)
end
r3(r)=F(2,1)/F(1,1);
R3(r)=(abs(r3(r)))^2;
%amplitude reflection coefficient
%power reflection coefficient of single grating
PHI=2*pi*nef*dzo/w;
%phase difference between gratings
Fp=[exp(-i*PHI) 0; 0 exp(i*PHI)];
Ffp=F*Fp*F;
t3(r)=1/Ffp(1,1);
T3(r)=(abs(t3(r)))^2;
%amplitude transmission coefficient
%power transmission coefficient of Fabry-Perot filter
end
%Plots for reflection and transmission spectra for Bragg reflector and
%Fabry-Perot filter respectively
figure (1)
plot(wal*1e9, T3)
grid
axis([1309.5 1310.5 0.1 1.0])
title('Transmission Spectrum of the Fabry-Perot Filter')
xlabel('Wavelength(nm)')
ylabel('Power(p.u)')
120
APPENDIX D
RS-232 Settings
Status shown when interfacing a computer to motor tunable filter success establish.
Serial Port Status While Interface With Motor Driven Tunable Filter
121
A message appear when tunable filter is powered on, and is connected through the RS232 communications cable, or a reset command is sent, a message is displayed on the PC
as below:
TF-100-MC
unit model
EVA7_V4.55
software version 4.52 (with SPI)
NO:91033-01R
unit serial number
W1270-1310
valid wavelength range
OVERSHOOT:30
OZ calibration, in steps
CALIB: 01/23/2007
date of calibration, mm/dd/yyyy
GEAR RATIO:485:1
reduction gear ratio
MOTOR VOLT:12
motor supply voltage
MINTERVAL(MS):0.9
motor time between steps
I2C ADDRESS:96
unit I2C address in decimal (or SPI xy where
x is the SPI clock polarity and y is the SPI data
position)
122
APPENDIX E
Wavelength (nm)
Position (step)
Measured Power (nW)
1269.60
2405
59.31
1270.62
2424
59.76
1271.64
2444
65.67
1272.66
2465
62.92
1273.68
2486
67.31
1274.7
2506
72.12
1275.72
2527
67.45
1276.74
2549
74.48
1277.76
2570
75.34
1278.78
2590
72.95
1279.80
2612
75.67
1280.82
2636
77.84
1281.84
2657
77.89
1282.86
2680
76.74
1283.88
2704
80.96
1284.9
2729
85.34
1285.92
2752
85.97
1286.94
2777
85.45
1287.96
2804
88.1
1288.98
2829
90.62
1290.00
2855
92.82
1291.02
2882
92.62
1292.04
2910
88.95
1293.06
2937
86.74
1294.08
2966
97.91
1295.10
2997
95.93
1296.12
3028
92.07
1297.14
3058
93.83
123
1298.16
3091
100.0
1299.18
3126
99.83
1300.20
3161
102.2
1301.22
3196
96.76
1302.24
3235
99.33
1303.26
3275
102.5
1304.28
3315
100.1
1305.30
3358
97.37
1306.32
3406
98.59
1307.34
3459
99.47
1308.36
3515
96.39
1309.38
3581
98.87
1310.40
3660
93.18
Calibration of Motor Tunable Filter Using Broadband Souce and Photodetector
124
APPENDIX F
FBG1
No.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
Wavelength
(MTF)
1272.0
1272.1
1272.2
1272.3
1272.4
1272.5
1272.6
1272.7
1272.8
1272.9
1273.0
1273.1
1273.2
1273.3
1273.4
1273.5
1273.6
1273.7
1273.8
1273.9
1274.0
1274.1
Power (Watt)
9.366E-11
2.644E-10
9.375E-10
1.888E-09
4.587E-09
8.182E-09
1.698E-08
1.793E-08
2.575E-08
2.609E-08
2.748E-08
2.733E-08
2.167E-08
2.097E-08
1.203E-08
1.107E-08
3.601E-09
3.232E-09
6.415E-10
5.356E-10
8.359E-11
8.438E-11
FBG2
No.
1
2
3
4
5
Wavelength
(MTF)
1279.7
1279.8
1279.9
1280.0
1280.1
Power (Watt)
4.97E-11
2.297E-10
8.011E-10
1.694E-09
4.654E-09
125
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
1280.2
1280.3
1280.4
1280.5
1280.6
1280.7
1280.8
1280.9
1281.0
1281.1
1281.2
1281.3
1281.4
1281.5
1281.6
1281.7
1281.8
1281.9
1282.0
8.38E-09
2.192E-08
2.337E-08
3.976E-08
4.788E-08
5.081E-08
5.203E-08
4.99E-08
3.927E-08
3.808E-08
2.094E-08
1.962E-08
7.031E-09
6.302E-09
1.239E-09
3.895E-10
2.072E-10
1.178E-10
8.646E-11
FBG3
No.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
Wavelength
(MTF)
1284.5
1284.6
1284.7
1284.8
1284.9
1285.0
1285.1
1285.2
1285.3
1285.4
1285.5
1285.6
1285.7
1285.8
Power (Watt)
1.314E-10
1.704E-10
1.666E-10
1.985E-10
5.015E-10
1.192E-09
2.222E-09
7.279E-09
8.483E-09
8.457E-09
3.017E-08
3.644E-08
4.304E-08
4.736E-08
126
15
16
17
18
19
20
21
22
23
24
25
26
27
28
1285.9
1286.0
1286.1
1286.2
1286.3
1286.4
1286.5
1286.6
1286.7
1286.8
1286.9
1287.0
1287.1
1287.2
5.026E-08
5.008E-08
4.477E-08
4.312E-08
3.039E-08
2.081E-08
1.332E-08
5.502E-09
2.293E-09
1.155E-09
4.312E-10
2.765E-10
2.705E-10
2.37E-10
FBG4
No.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
Wavelength
(MTF)
1287.5
1287.6
1287.7
1287.8
1287.9
1288.0
1288.1
1288.2
1288.3
1288.4
1288.5
1288.6
1288.7
1288.8
1288.9
1289.0
1289.1
1289.2
1289.3
Power (Watt)
7.854E-11
1.181E-10
1.547E-10
6.976E-10
8.789E-10
2.711E-09
5.926E-09
6.506E-09
1.046E-08
1.223E-08
1.319E-08
1.413E-08
1.409E-08
1.314E-08
1.164E-08
9.421E-09
5.356E-09
2.916E-09
1.683E-09
127
20
21
22
23
1289.4
1289.5
1289.6
1289.7
4.397E-10
3.401E-10
1.124E-10
7.187E-11
FBG5
No.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
Wavelength
(MTF)
1276.7
1276.8
1276.9
1277.0
1277.1
1277.2
1277.3
1277.4
1277.5
1277.6
1277.7
1277.8
1277.9
1278.0
1278.1
1278.2
1278.3
1278.4
1278.5
1278.6
1278.7
1278.8
1278.9
1279.0
Power (Watt)
4.34E-10
4.79E-10
2.38E-09
2.75E-09
1.05E-08
2.00E-08
2.51E-08
3.48E-08
4.00E-08
4.49E-08
4.50E-08
4.26E-08
3.83E-08
3.05E-08
2.38E-08
1.47E-08
9.43E-09
4.33E-09
2.38E-09
8.75E-10
4.56E-10
2.17E-10
1.84E-10
1.52E-10
128
FBG6
No.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
Wavelength
(MTF)
1282.3
1282.4
1282.5
1282.6
1282.7
1282.8
1282.9
1283.0
1283.1
1283.2
1283.3
1283.4
1283.5
1283.6
1283.7
1283.8
1283.9
1284.0
1284.1
1284.2
Power (Watt)
2.397E-10
6.076E-10
3.061E-09
3.503E-09
1.278E-08
2.352E-08
3.164E-08
4.400E-08
5.154E-08
6.226E-08
6.067E-08
5.746E-08
4.709E-08
3.869E-08
1.967E-08
1.818E-08
5.811E-09
2.272E-09
9.775E-10
1.719E-10
FBG7
No.
1
2
3
4
5
6
7
8
9
Wavelength
(MTF)
1280.4
1280.5
1280.6
1280.7
1280.8
1280.9
1281.0
1281.1
1281.2
Power (Watt)
3.67E-10
3.72E-10
3.24E-10
3.64E-10
3.36E-10
3.97E-10
6.10E-10
7.64E-10
1.55E-09
129
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
1281.3
1281.4
1281.5
1281.6
1281.7
1281.8
1281.9
1282.0
1282.1
1282.2
1282.3
1282.4
1282.5
1282.6
1282.7
1282.8
1282.9
1283.0
1283.1
1283.2
1283.3
1283.4
1283.5
1.68E-09
2.76E-09
2.86E-09
3.69E-09
3.71E-09
3.55E-09
3.02E-09
2.56E-09
1.91E-09
1.85E-09
1.81E-09
1.82E-09
1.83E-09
1.84E-09
1.82E-09
1.83E-09
4.76E-10
4.74E-10
4.96E-10
4.94E-10
5.20E-10
4.97E-10
5.43E-10
FBG8
No.
Wavelength (MTF)
1
2
1269.6
1269.7
1269.8
1269.9
1270.0
1270.1
1270.2
1270.3
1270.4
3
4
5
6
7
8
9
Power
(Watt)
2.586E-09
5.71E-09
8.511E-09
1.386E-08
1.768E-08
1.812E-08
2.242E-08
2.262E-08
2.129E-08
130
10
11
12
13
14
15
16
17
18
19
1270.5
1270.6
1270.7
1270.8
1270.9
1271.0
1271.1
1271.2
1271.3
1271.4
2.075E-08
1.482E-08
1.398E-08
6.4E-09
5.621E-09
1.689E-09
1.374E-09
2.567E-10
2.347E-10
9.091E-11
FBG9
No.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
Wavelength (MTF) Power (Watt)
1274.0
8.576E-11
1274.1
8.58E-11
1274.2
4.993E-10
1274.3
6.158E-10
1274.4
3.442E-09
1274.5
3.799E-09
1274.6
1.207E-08
1274.7
1.306E-08
1274.8
2.692E-08
1274.9
2.798E-08
1275.0
3.784E-08
1275.1
3.839E-08
1275.2
3.778E-08
1275.3
3.723E-08
1275.4
3.000E-08
1275.5
2.671E-08
1275.6
1.366E-08
1275.7
1.269E-08
1275.8
4.211E-09
1275.9
1.513E-09
1276.0
6.708E-10
1276.1
2.008E-10
1276.2
1.449E-10