Document 14025208
advertisement

Handbook of Satisfiability
Editors A. Biere, M. Heule, H. van Maaren, and T. Walsh
IOS Press, 2008
c 2008 Editors A. Biere, M. Heule, H. van Maaren, and T. Walsh. All rights
reserved.
1
Chapter 6
Incomplete Algorithms [draft v2]
Henry Kautz, Ashish Sabharwal, and Bart Selman
An incomplete method for solving the propositional satisfiability problem (or a
general constraint satisfaction problem) is one that does not provide the guarantee that it will eventually either report a satisfying assignment or declare that
the given formula is unsatisfiable. In practice, most such methods are biased towards the satisfiable side: they are typically run with a pre-set limit, after which
they either produce a solution or report failure; they never declare the formula
to be unsatisfiable. These are the kind of algorithms we will discuss in this chapter. In principle, an incomplete algorithm could instead be biased towards the
unsatisfiable side, always providing proofs of unsatisfiability but failing to find
solutions to some satisfiable instances, or be incomplete w.r.t. both satisfiable
and unsatisfiable instances.
Unlike systematic solvers often based on an exhaustive branching and backtracking search, incomplete methods are generally based on stochastic local search,
sometimes referred to as SLS. On problems from a variety of domains, such incomplete methods for SAT can significantly outperform DPLL-based methods.
Since the early 1990’s, there has been a tremendous amount of research on designing, understanding, and improving local search methods for SAT. 1 There
have also been attempts at hybrid approaches that explore combining ideas from
DPLL methods and local search techniques [e.g. Habet et al., 2002, Mazure et al.,
1996, Prestwich, 2001, Rish and Dechter, 1996]. We cannot do justice to all recent research in local search solvers for SAT, and will instead try to provide a
brief overview and touch upon some interesting details. The interested reader
is encouraged to further explore the area through some of the nearly a hundred
publications we cite along the way.
We begin the chapter by discussing two methods that played a key role in
the success of local search for satisfiability, namely GSAT [Selman et al., 1992]
1 For example, there is work by Anbulagan et al. [2005], Cha and Iwama [1996], Frank et al.
[1997], Gent and Walsh [1993], Ginsberg and McAllester [1994], Gu [1992], Gu et al. [1997],
Heule and van Maaren [2006], Heule et al. [2004], Hirsch and Kojevnikov [2005], Hoos [1999,
2002], Hoos and Stützle [2004], Kirkpatrick and Selman [1994], Konolige [1994], Li et al. [2007,
2003], McAllester et al. [1997], Morris [1993], Parkes and Walser [1996], Pham et al. [2007],
Resende and Feo [1996], Schuurmans and Southey [2001], Spears [1996], Thornton et al. [2004],
Wu and Wah [2000], and others.
2
Chapter 6. Incomplete Algorithms
and Walksat [Selman, Kautz, and Cohen, 1996]. We will then explore alternative techniques based on the discrete Lagrangian method [Schuurmans et al.,
2001, Shang and Wah, 1998, Wu and Wah, 1999, 2000], the phase transition phenomenon in random k-SAT [Crawford and Auton, 1993, Kirkpatrick and Selman,
1994, Mitchell et al., 1992], and a relatively new incomplete technique called Survey Propagation [Mézard et al., 2002].
We note that there are other exciting related solution methodologies, such as
those based on translation to integer programming [Hooker, 1988, Kamath et al.,
1990], that we will not discuss here. There has also been work on formally analyzing local search methods, yielding some of the best o(2n ) time algorithms for
SAT. For instance, the expected running time, ignoring polynomial factors, of a
simple local search method with restarts after every 3n “flips” has been shown to
be (2 · (k − 1)/k)n for k-SAT [Schöning, 1999, 2002], which yields a complexity
of (4/3)n for 3-SAT. This result has been derandomized to yield a deterministic
algorithm with complexity 1.481n up to polynomial factors [Dantsin et al., 2002].
For the discussion in the rest of this chapter, it will be illustrative to think of
a propositional formula F with n variables and m clauses as creating a discrete
n
manifold or landscape in the space {0, 1} × {0, 1, . . . , m}. The 2n truth assignn
ments to the variables of F correspond to the points in {0, 1} , and the “height”
of each such point, a number in {0, 1, . . . , m}, corresponds to the number of unsatisfied clauses of F under this truth assignment. The solutions or satisfying
assignments for F are precisely the points in this landscape with height zero,
and thus correspond to the global minima of this landscape, or, equivalently, the
n
global minima of the function that assigns each point in {0, 1} to its height. The
search problem for SAT is then a search for a global minimum in this implicitly
defined exponential-size landscape. Clearly, if the landscape did not have any
local minima, a greedy descent would provide an effective search method. All
interesting problems, however, do have local minima—the main challenge and
opportunity for the designers of local search methods.
This landscape view also leads one naturally to the problem of maximum
satisfiability or MAX-SAT: Given a formula F , find a truth assignment that
satisfies the most number of clauses possible. Solutions to the MAX-SAT problem
are, again, precisely the global minima of the corresponding landscape, only that
these global minima may not have height zero. Most of the incomplete methods
we will discuss in this chapter, especially those based on local search, can also work
as a solution approach for the MAX-SAT problem, by providing the “best found”
truth assignment (i.e., one with the lowest observed height) upon termination.
Of course, while it is easy to test whether the best found truth assignment is a
solution to a SAT instance, it is NP-hard to perform the same test for a MAX-SAT
instance. Thus, this approach only provides a heuristic algorithm for MAX-SAT.
For further details on this problem, we refer the reader to Part 2, Chapter 5 of
this Handbook.
6.1. Greedy Search, Focused Random Walk, and Extensions
The original impetus for trying a local search method on satisfiability problems
was the successful application of such methods for finding solutions to large N -
Chapter 6. Incomplete Algorithms
3
queens problems, first using a connectionist system by Adorf and Johnston [1990],
and then using greedy local search by Minton et al. [1990]. It was originally assumed that this success simply indicated that N -queens was an easy problem, and
researchers felt that such techniques would fail in practice for SAT and other more
intricate problems. In particular, it was believed that local search methods would
easily get stuck in local minima, with a few clauses remaining unsatisfied. Experiments with the solver GSAT showed, however, that certain local search strategies
often do reach global minima, in many cases much faster than systematic search
methods.
GSAT is based on a randomized local search technique [Lin and Kernighan,
1973, Papadimitriou and Steiglitz, 1982]. The basic GSAT procedure, introduced
by Selman et al. [1992] and described here as Algorithm 6.1, starts with a randomly generated truth assignment for all variables. It then greedily changes
(‘flips’) the truth assignment of the variable that leads to the greatest decrease
in the total number of unsatisfied clauses. The neighborhood of the current truth
assignment, thus, is the set of n truth assignments that differ from the current
one in exactly one variable. Such flips are repeated until either a satisfying assignment is found or a pre-set maximum number of flips (max-flips) is reached.
This process is repeated as needed, up to a maximum of max-tries times.
Algorithm 6.1: GSAT (F )
Input
: A CNF formula F
Parameters : Integers max-flips, max-tries
Output
: A satisfying assignment for F , or FAIL
begin
for i ← 1 to max-tries do
σ ← a randomly generated truth assignment for F
for j ← 1 to max-flips do
if σ satisfies F then return σ
// success
v ← a variable flipping which results in the greatest decrease
(possibly negative) in the number of unsatisfied clauses
Flip v in σ
return FAIL
end
// no satisfying assignment found
Selman et al. showed that GSAT substantially outperformed even the best
backtracking search procedures of the time on various classes of formulas, including randomly generated formulas and SAT encodings of graph coloring problems [Johnson et al., 1991]. The search of GSAT typically begins with a rapid
greedy descent towards a better truth assignment (i.e., one with a lower height),
followed by long sequences of “sideways” moves. Sideways moves are moves that
do not increase or decrease the total number of unsatisfied clauses. In the landscape corresponding to the formula, each collection of truth assignments that are
connected together by a sequence of possible sideways moves is referred to as a
plateau. Experiments indicate that on many formulas, GSAT spends most of its
time on plateaus, transitioning from one plateau to another every so often. Inter-
4
Chapter 6. Incomplete Algorithms
estingly, Frank et al. [1997] observed that in practice, almost all plateaus do have
so-called “exits” that lead to another plateau with a lower number of unsatisfied
clauses. Intuitively, in a very high dimensional search space such as the space of
a 10,000 variable formula, it is very rare to encounter local minima, which are
plateaus from where there is no local move that decreases the number of unsatisfied clauses. In practice, this means that GSAT most often does not get stuck in
local minima, although it may take a substantial amount of time on each plateau
before moving on to the next one. This motivates studying various modifications
in order to speed up this process [Selman and Kautz, 1993, Selman et al., 1994].
One of the most successful strategies is to introduce noise into the search in the
form of uphill moves, which forms the basis of the now well-known local search
method for SAT called Walksat [Selman et al., 1996].
Walksat interleaves the greedy moves of GSAT with random walk moves of a
standard Metropolis search. It further focuses the search by always selecting the
variable to flip from an unsatisfied clause C (chosen at random). This seemingly
simple idea of focusing the search turns out to be crucial for scaling such techniques to problems beyond a few hundred variables. If there is a variable in C
flipping which does not turn any currently satisfied clauses to unsatisfied, it flips
this variable (a “freebie” move). Otherwise, with a certain probability, it flips
a random literal of C (a “random walk” move), and with the remaining probability, it flips a variable in C that minimizes the break-count, i.e., the number of
currently satisfied clauses that become unsatisfied (a “greedy” move). Walksat
is presented in detail as Algorithm 6.2. One of its parameters, in addition to
the maximum number of tries and flips, is the noise p ∈ [0, 1], which controls
how often are non-greedy moves considered during the stochastic search. It has
been found empirically that for various problems from a single domain, a single
value of p is optimal. For random 3-SAT formulas, the optimal noise is seen to be
0.57, and at this setting, Walksat is empirically observed to scale linearly even
for clause-to-variable ratios α > 4.2 [Seitz et al., 2005].2
The focusing strategy of Walksat based on selecting variables solely from
unsatisfied clauses was inspired by the O(n2 ) randomized algorithm for 2-SAT
by Papadimitriou [1991]. It can be shown that for any satisfiable formula and
starting from any truth assignment, there exists a sequence of flips using only
variables from unsatisfied clauses such that one obtains a satisfying assignment.
When one compares the biased random walk strategy of Walksat on hard
random 3-CNF formulas against basic GSAT, the simulated annealing process of
Kirkpatrick et al. [1983], and a pure random walk strategy, the biased random
walk process significantly outperforms the other methods [Selman et al., 1994]. In
the years following the development of Walksat, many similar methods have been
shown to be highly effective on not only random formulas but on several classes
of structured instances, such as encodings of circuit design problems, Steiner tree
problems, problems in finite algebra, and AI planning [cf. Hoos and Stützle, 2004].
Various extensions of the basic process have also been explored, such as dynamic
search policies like adapt-novelty [Hoos, 2002], incorporating unit clause elimination as in the solver UnitWalk [Hirsch and Kojevnikov, 2005], and exploiting
2 Aurell et al. [2004] had observed earlier that Walksat scales linearly for random 3-SAT at
least till clause-to-variable ratio 4.15.
Chapter 6. Incomplete Algorithms
5
Algorithm 6.2: Walksat (F )
Input
: A CNF formula F
Parameters : Integers max-flips, max-tries; noise parameter p ∈ [0, 1]
Output
: A satisfying assignment for F , or FAIL
begin
for i ← 1 to max-tries do
σ ← a randomly generated truth assignment for F
for j ← 1 to max-flips do
if σ satisfies F then return σ
// success
C ← an unsatisfied clause of F chosen at random
if ∃ variable x ∈ C with break-count = 0 then
v←x
// freebie move
else
With probability p:
// random walk move
v ← a variable in C chosen at random
With probability 1 − p:
// greedy move
v ← a variable in C with the smallest break-count
Flip v in σ
return FAIL
end
// no satisfying assignment found
problem structure for increased efficiency [Pham et al., 2007]. Recently, it was
shown that the performance of stochastic solvers on many structured problems
can be further enhanced by using new SAT encodings that are designed to be
effective for local search [Prestwich, 2007].
While adding random walk moves as discussed above turned out to be a successful method of guiding the search away from local basins of attraction and
toward other parts of the search space, a different line of research considered
techniques that relied on the idea of clause re-weighting as an extension of basic
greedy search [Cha and Iwama, 1996, Frank, 1997, Hutter et al., 2002, Morris,
1993, Selman et al., 1992, Thornton et al., 2004]. Here one assigns a positive
weight to each clause and attempts to minimize the sum of the weights of the
unsatisfied clauses. The clause weights are dynamically modified as the search
progresses, increasing the weight of the clauses that are currently unsatisfied.
(In some implementations, increasing the weight of a clause was done by simply
adding identical copies of the clause.) In this way, if one waits sufficiently long,
any unsatisfied clause gathers enough weight so as to sway the truth assignment
in its favor. This is thought of as “flooding” the current local minimum by reweighting unsatisfied clauses to create a new descent direction for local search.
Variants of this approach differ in the re-weighting strategy used, e.g., how often and by how much the weights of unsatisfied clauses are increased, and how
are all weights periodically decreased in order to prevent certain weights from
becoming dis-proportionately high. The work on DLM or Discrete Lagrangian
Method grounded these techniques in a solid theoretical framework, whose details
we defer to Section 6.2. The SDF or “smoothed descent and flood” system of
Schuurmans and Southey [2001] achieved significantly improved results by using
6
Chapter 6. Incomplete Algorithms
multiplicative (rather than additive) re-weighting, by making local moves based
on how strongly clauses are currently satisfied in terms of the number of satisfied
literals (rather than simply how many are satisfied), and by periodically shrinking
all weights towards their common mean.
Other approaches for improving the performance of GSAT were also explored.
These included TSAT by Mazure et al. [1997], who maintained a tabu list in order
to prevent GSAT from repeating earlier moves, and HSAT by Gent and Walsh [1993],
who considered breaking ties in favor of least recently flipped variables. These
strategies provided improvement, but to a lesser extent than the random walk
component added by Walksat.
In an attempt towards understanding many of these techniques better,
Schuurmans and Southey [2001] proposed three simple, intuitive measures of the
effectiveness of local search: depth, mobility, and coverage. (A) Depth measures
how many clauses remain unsatisfied as the search proceeds. Typically, good local search strategies quickly descend to low depth and stay there for a long time;
this corresponds to spending as much time as possible near the bottom of the
search landscape. (B) Mobility measures how rapidly the process moves to new
regions in the search space (while simultaneously trying to stay deep in the objective). Clearly, the larger the mobility, the better chance a local search strategy
has of success. (C) Coverage measures how systematically the process explores
the entire space, in terms of the largest “gap”, i.e., the maximum Hamming distance between any unexplored assignment and the nearest evaluated assignment.
Schuurmans and Southey [2001] hypothesized that, in general, successful local
search procedures work well not because they possess any special ability to predict whether a local basin of attraction contains a solution or not—rather they
simply descend to promising regions and explore near the bottom of the objective
as rapidly, broadly, and systematically as possible, until they stumble across a
solution.
6.2. Discrete Lagrangian Methods
Shang and Wah [1998] introduced a local search system for SAT based on the
theory of Lagrange multipliers. They extended the standard Lagrange method,
traditionally used for continuous optimization, to the discrete case of propositional
satisfiability, in a system called DLM (Discrete Lagrangian Method). Although
the final algorithm that comes out of this process can be viewed as a “clause
weighted” version of local search as discussed earlier, this approach provided a
theoretical foundation for design choices that had appeared somewhat ad-hoc in
the past. The change in the weights of clauses that are unsatisfied translates in
this system to a change is the corresponding Lagrange multipliers, as one searches
for a (local) optimum of the associated Lagrange function.
The basic idea behind DLM is the following. Consider an n-variable CNF
n
formula F with clauses C1 , C2 , . . . , Cm . For x ∈ {0, 1} and i ∈ {1, 2, . . . , m}, let
Ui (x) be a function that is 0 if Ci is satisfied by x, and 1 otherwise. Then the
SAT problem for F can be written as the following optimization problem over
Chapter 6. Incomplete Algorithms
7
n
x ∈ {0, 1} :
minimize
N (x) =
m
X
Ui (x)
(6.1)
i=1
subject to
Ui (x) = 0
∀i ∈ {1, 2, . . . , m}
Notice that N (x) ≥ 0 and equals 0 iff all clauses of F are satisfied. Thus,
the objective function N (x) is minimized iff x is a satisfying assignment for F .
This formulation, somewhat strangely, also has each clause as an explicit constraint Ui (x), so that any feasible solution is automatically also locally as well as
globally optimal. This redundancy, however, is argued to be the strength of the
system: the dynamic shift in emphasis between the objective and the constraints,
depending on the relative values of the Lagrange multipliers, is the key feature of
Lagrangian methods.
The theory of discrete Lagrange multipliers provides a recipe for converting
the above constrained optimization problem into an unconstrained optimization
problem, by introducing a Lagrange multiplier for each of the constraints and
adding the constraints, appropriately multiplied, to the objective function. The
resulting discrete Lagrangian function, which provides the new objective function
to be optimized, is similar to what one would obtain in the traditional continuous
optimization case:
m
X
λi Ui (x)
(6.2)
Ld (x, λ) = N (x) +
i=1
n
where x ∈ {0, 1} are points in the variable space and λ = (λ1 , λ2 , . . . , λm ) ∈ Rm
is a vector of Lagrange multipliers, one for each constraint in (i.e., clause of)
n
F . A point (x∗ , λ∗ ) ∈ {0, 1} × Rm is called a saddle point of the Lagrange
function Ld (x, λ) if it is a local minimum w.r.t. x∗ and a local maximum w.r.t.
λ∗ . Formally, (x∗ , λ∗ ) is a saddle point for Ld if
Ld (x∗ , λ) ≤ Ld (x∗ , λ∗ ) ≤ Ld (x, λ∗ )
for all λ sufficient close to λ∗ and for all x that differ from x∗ only in one dimension.
It can be proven that x∗ is a local minimum solution to the discrete constrained
optimization formulation of SAT (6.1) if there exists λ∗ such that (x∗ , λ∗ ) is a
saddle point of the associated Lagrangian function Ld (x, λ). Therefore, local
search methods based on the Lagrangian system look for saddle points in the
extended space of variables and Lagrange multipliers. By doing descents in the
original variable space and ascents in the Lagrange-multiplier space, a saddle
point equilibrium is reached when (locally) optimal solutions are found.
For SAT, this is done through a difference gradient ∆x Ld (x, λ), defined to be
n
a vector in {−1, 0, 1} with the properties that it has at most one non-zero entry
and y = x ⊕ ∆x Ld (x, λ) minimizes Ld (y, λ) over all neighboring points y of x,
including x itself. Here ⊕ is the vector addition; x ⊕ z = (x1 + z1 , . . . , xn + zn ).
The neighbors are “user-defined” and are usually taken to be all points that
differ from x only in one dimension (i.e., are one variable flip away). Intuitively,
∆x Ld (x, λ) “points in the direction” of the neighboring value in the variable space
that minimizes the Lagrangian function for the current λ.
8
Chapter 6. Incomplete Algorithms
This yields an algorithmic approach for minimizing the discrete Lagrangian
function Ld (x, λ) associated with SAT (and hence minimizing the objective function N (x) in the discrete constrained optimization formulation of SAT (6.1)).
n
The algorithm proceeds iteratively in stages, updating x ∈ {0, 1} and λ ∈ Rm in
each stage using the difference gradient and the current status of each constraint
in terms of whether or not it is satisfied, until a fixed point is found. Let x(k)
and λ(k) denote the values of x and λ after the k th iteration of the algorithm.
Then the updates are as follows:
x(k + 1) = x(k) ⊕ ∆x Ld (x(k), λ(k))
λ(k + 1) = λ(k) + c U (x(k))
where c ∈ R+ is a parameter that controls how fast the Lagrange multipliers are
increased over iterations and U denotes the vector of the m constraint functions
Ui defined earlier. The difference gradient ∆x Ld determines which variable, if
any, to flip in order to lower Ld (x, λ) for the current λ. When a fixed point for
these iterations is reached, i.e., when x(k + 1) = x(k) and λ(k + 1) = λ(k), it must
be that all constraints Ui are satisfied. To see this, observe that if the ith clause
is unsatisfied after the k th iteration, then Ui (x(k)) = 1, which implies λi (k + 1) =
λi (k) + c; thus, λi will keep increasing until Ui is satisfied. This provides dynamic
clause re-weighting in this system, placing more and more emphasis on clauses
that are unsatisfied until they become satisfied. Note that changing the Lagrange
multipliers λi in turn affects x by changing the direction in which the difference
gradient ∆x Ld (x, λ) points, eventually leading to a point at which all constraints
are satisfied. This is the essence of the DLM system for SAT.
The basic implementation of DLM [Shang and Wah, 1998] uses a simple controlled update rule for λ: increase λi by 1 for all unsatisfied clauses Ci after a
pre-set number θ1 of up-hill or flat moves (i.e., changes in x that do not decrease
Ld (x, λ)) have been performed. In order to avoid letting some Lagrange multipliers become disproportionately large during the search, all λi ’s are periodically
decreased after a pre-set number θ2 of increases in λ have been performed. Finally, the implementation uses tabu lists to store recently flipped variables, so as
to avoid flipping them repeatedly.
Wu and Wah [1999] observed that in many difficult to solve instances, such
as from the parity and hanoi domains, basic DLM frequently gets stuck in
traps, i.e., pairs (x, λ) such that there are one or more unsatisfied clauses but the
associated Ld increases by changing x in any one dimension. They found that
on these instances, some clauses are significantly more likely than others to be
amongst the unsatisfied clauses in such a trap. (Note that this is different from
counting how often is a clause unsatisfied; here we only consider the clause status
inside a trap situation, ignoring how the search arrived at the trap.) Keeping track
of such clauses and periodically performing a special increase in their associated
Lagrange multipliers, guides the search away from traps and results in better
performance.
Wu and Wah [2000] later generalized this strategy by recording not only information about traps but a history of all recently visited points in the variable
space. Instead of performing a special increase periodically, this history information is now added directly as a distance penalty term to the Lagrangian function
Chapter 6. Incomplete Algorithms
9
Ld . The penalty is larger for points that are in Hamming distance closer to the
current value of x, thereby guiding the search away from recently visited points
(in particular, points inside a trap that would be visited repeatedly).
6.3. The Phase Transition Phenomenon in Random k-SAT
One of the key motivations in the early 1990’s for studying incomplete, stochastic
methods for solving SAT problems was the observation that DPLL-based systematic solvers perform quite poorly on certain randomly generated formulas.
For completeness, we provide a brief overview of these issues here; for a detailed
discussion, refer to Part 1, Chapter 8 of this Handbook.
Consider a random k-CNF formula F on n variables generated by independently creating m clauses as follows: for each clause, select k distinct variables
uniformly at random out of the n variables and negate each variable with probability 0.5. When F is chosen from this distribution, Mitchell, Selman, and Levesque
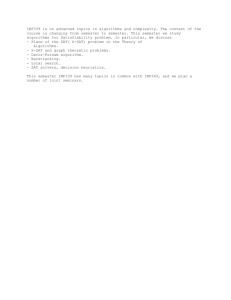
[1992] observed that the median hardness of the problems is very nicely characterized by a key parameter: the clause-to-variable ratio, m/n, typically denoted by α. They observed that problem hardness peaks in a critically constrained region determined by α alone. The left pane of Figure 6.1 depicts the
now well-known “easy-hard-easy” pattern of SAT and other combinatorial problems, as the key parameter (in this case α) is varied. For random 3-SAT, this
region has been experimentally shown to be around α ≈ 4.26 (for early results
see Crawford and Auton [1993], Kirkpatrick and Selman [1994]; new findings by
Mertens et al. [2006]), and has provided challenging benchmarks as a test-bed
for SAT solvers. Cheeseman et al. [1991] observed a similar easy-hard-easy pattern in random graph coloring problems. For random formulas, interestingly, a
slight natural variant of the above “fixed-clause-length” model, called the variableclause-length model, does not have a clear set of parameters that leads to a hard
set of instances [Franco and Paull, 1983, Goldberg, 1979, Purdom Jr. and Brown,
1987]. This apparent difficulty in generating computationally hard instances for
SAT solvers provided the impetus for much of the early work on local search
methods for SAT. We refer the reader to Cook and Mitchell [1997] for a detailed
survey.
The critically constrained region marks a stark transition not only in the
computational hardness of random SAT instances but also in their satisfiability
itself. The right pane of Figure 6.1 shows the fraction of random formulas that are
unsatisfiable, as a function of α. We see that nearly all problems with α below the
critical region (the under-constrained problems) are satisfiable. As α approaches
and passes the critical region, there is a sudden change and nearly all problems
in this over-constrained region are unsatisfiable. Further, as n grows, this phase
transition phenomenon becomes sharper and sharper, and coincides with the region in which the computational hardness peaks. The relative hardness of the
instances in the unsatisfiable region to the right of the phase transition is consistent with the formal result of Chvátal and Szemerédi [1988] who, building upon
the work of Haken [1985], proved that large unsatisfiable random k-CNF formulas
almost surely require exponential size resolution refutations, and thus exponential
length runs of any DPLL-based algorithm proving unsatisfiability. This formal re-
10
Chapter 6. Incomplete Algorithms
4000
20--variable formulas
40--variable formulas
50--variable formulas
3500
# of DP calls
3000
2500
2000
1500
1000
500
0
2
3
4
5
6
Ratio of clauses-to-variables
7
1
N = 12
N = 20
N = 24
N = 40
N = 50
N = 100
0.8
Fraction of unsatisfiable formulae
8
Threshold for 3SAT
0.6
0.4
0.2
0
3
3.5
4
4.5
5
M/N
5.5
6
6.5
7
Figure 6.1. The phase transition phenomenon in random 3-SAT. Top: Computational hardness peaks at α ≈ 4.26. Bottom: Problems change from being mostly satisfiable to mostly
unsatisfiable. The transitions sharpen as the number of variables grows.
sult was subsequently refined and strengthened by others [cf. Beame et al., 1998,
Beame and Pitassi, 1996, Clegg et al., 1996].
Relating the phase transition phenomenon for 3-SAT to statistical physics,
Kirkpatrick and Selman [1994] showed that the threshold has characteristics typical of phase transitions in the statistical mechanics of disordered materials (see
also Monasson et al. [1999] and Part 2, Chapter 4 of this Handbook). Physicists have studied phase transition phenomena in great detail because of the
many interesting changes in a system’s macroscopic behavior that occur at phase
boundaries. One useful tool for the analysis of phase transition phenomena is
called finite-size scaling analysis. This approach is based on rescaling the horizontal axis by a factor that is a function of n. The function is such that the
horizontal axis is stretched out for larger n. In effect, rescaling “slows down”
the phase-transition for higher values of n, and thus gives us a better look inside
the transition. From the resulting universal curve, applying the scaling function
backwards, the actual transition curve for each value of n can be obtained. In
principle, this approach also localizes the 50%-satisfiable-point for any value of
Chapter 6. Incomplete Algorithms
11
n, which allows one to generate very hard random 3-SAT instances.
Interestingly, it is still not formally known whether there even exists a critical constant αc such that as n grows, almost all 3-SAT formulas with α < αc
are satisfiable and almost all 3-SAT formulas with α > αc are unsatisfiable. In
this respect, Friedgut [1999] provided the first positive result, showing that there
exists a function αc (n) depending on n such that the above threshold property
holds. (It is quite likely that the threshold in fact does not depend on n, and
is a fixed constant.) In a series of papers, researchers have narrowed down the
gap between upper bounds on the threshold for 3-SAT [e.g. Broder et al., 1993,
Dubois et al., 2000, Franco and Paull, 1983, Janson et al., 2000, Kirousis et al.,
1996], the best so far being 4.596, and lower bounds [e.g. Achlioptas, 2000,
Achlioptas and Sorkin, 2000, Broder et al., 1993, Franco, 1983, Frieze and Suen,
1996, Hajiaghayi and Sorkin, 2003, Kaporis et al., 2006], the best so far being
3.52. On the other hand, for random 2-SAT, we do have a full rigorous understanding of the phase transition, which occurs at clause-to-variable ratio of
1 [Bollobás et al., 2001, Chvátal and Reed, 1992]. Also, for general k, the threshold for random k-SAT is known to be in the range 2k ln 2−O(k) [Achlioptas et al.,
2005, Gomes and Selman, 2005].
6.4. A New Technique for Random k-SAT: Survey Propagation
We end this section with a brief discussion of Survey Propagation (SP), an exciting new incomplete algorithm for solving hard combinatorial problems. The
reader is referred to Part 2, Chapter 4 of this Handbook for a detailed treatment of work in this direction. Survey propagation was discovered in 2002 by
Mézard, Parisi, and Zecchina [2002], and is so far the only known method successful at solving random 3-SAT instances with one million variables and beyond
in near-linear time in the most critically constrained region.3
The SP method is quite radical in that it tries to approximate, using an iterative process of local “message” updates, certain marginal probabilities related to
the set of satisfying assignments. It then assigns values to variables with the most
extreme probabilities, simplifies the formula, and repeats the process. This strategy is referred to as SP-inspired decimation. In effect, the algorithm behaves like
the usual DPLL-based methods, which also assign variable values incrementally
in an attempt to find a satisfying assignment. However, quite surprisingly, SP
almost never has to backtrack. In other words, the “heuristic guidance” from SP
is almost always correct. Note that, interestingly, computing marginals on satisfying assignments is strongly believed to be much harder than finding a single
satisfying assignment (#P-complete vs. NP-complete). Nonetheless, SP is able
to efficiently approximate certain marginals on random SAT instances and uses
this information to successfully find a satisfying assignment.
SP was derived from rather complex statistical physics methods, specifically,
the so-called cavity method developed for the study of spin glasses. The origin
3 As mentioned earlier, it has been recently shown that by finely tuning the noise and temperature parameters, Walksat can also be made to scale well on hard random 3-SAT instances
with clause-to-variable ratios α > 4.2 [Seitz et al., 2005].
12
Chapter 6. Incomplete Algorithms
of SP in statistical physics and its remarkable and unparalleled success on extremely challenging random 3-SAT instances has sparked a lot of interest in the
computer science research community, and has led to a series of papers in the last
five years exploring various aspects of SP [e.g. Achlioptas and Ricci-Tersenghi,
2006, Aurell et al., 2004, Braunstein and Zecchina, 2004, Kroc et al., 2007, 2008,
Krzakala et al., 2007, Maneva, 2006, Maneva and Sinclair, 2007, Maneva et al.,
2007, Mézard et al., 2005, Mézard and Zecchina, 2002, Zdeborova and Krzakala,
2007]. Many of these aspects still remain somewhat mysterious, making SP an
active and promising research area for statistical physicists, theoretical computer
scientists, and artificial intelligence practitioners alike.
While the method is still far from well-understood, close connections to belief propagation (BP) methods [Pearl, 1988] more familiar
to computer scientists have been subsequently discovered.
In particular, it was shown by Braunstein and Zecchina [2004] (later extended by
Maneva, Mossel, and Wainwright [2007]) that SP equations are equivalent to BP
equations for obtaining marginals over a special class of combinatorial objects,
called covers. In this respect, SP is the first successful example of the use of
a probabilistic reasoning technique to solve a purely combinatorial search problem. The recent work of Kroc et al. [2007] empirically established that SP, despite the very loopy nature of random formulas which violate the standard treestructure assumptions underlying the BP algorithm, is remarkably good at computing marginals over these covers objects on large random 3-SAT instances.
Kroc et al. [2008] also demonstrated that information obtained from BP-style algorithms can be effectively used to enhance the performance of algorithms for
the model counting problem, a generalization of the SAT problem where one is
interested in counting the number of satisfying assignments.
Unfortunately, the success of SP is currently limited to random SAT instances.
It is an exciting research challenge to further understand SP and apply it successfully to more structured, real-world problem instances.
6.5. Conclusion
Incomplete algorithms for satisfiability testing provide a complementary approach
to complete methods, using an essentially disjoint set of techniques and being
often well-suited to problem domains in which complete methods do not scale
well. While a mixture of greedy descent and random walk provide the basis for
most local search SAT solvers in use today, much work has gone into finding the
right balance and in developing techniques to focus the search and efficiently bring
it out of local minima and traps. Formalisms like the discrete Lagrangian method
and ideas like clause weighting or flooding have played a crucial role in pushing
the understanding and scalability of local search methods for SAT. An important
role has also been played by the random k-SAT problem, particularly in providing
hard benchmarks and a connection to the statistical physics community, leading
to the survey propagation algorithm. Can we bring together ideas and techniques
from systematic solvers and incomplete solvers to create a solver that has the
best of both worlds? While some progress has been made in this direction, much
remains to be done.
Bibliography
D. Achlioptas. Setting 2 variables at a time yields a new lower bound for random
3-SAT. In 32nd STOC, pages 28–37, Portland,OR, May 2000.
D. Achlioptas, A. Naor, and Y. Peres. Rigorous location of phase transitions in
hard optimization problems. Nature, 435:759–764, 2005.
D. Achlioptas and F. Ricci-Tersenghi. On the solution-space geometry of random
constraint satisfaction problems. In 38th STOC, pages 130–139, Seattle, WA,
May 2006.
D. Achlioptas and G. Sorkin. Optimal myopic algorithms for random 3-SAT. In
41st FOCS, pages 590–600, Redondo Beach, CA, Nov. 2000. IEEE.
H. Adorf and M. Johnston. A discrete stochastic neural network algorithm for
constraint satisfaction problems. In Intl. Joint Conf. on Neural Networks, pages
917–924, San Diego, CA, 1990.
Anbulagan, D. N. Pham, J. K. Slaney, and A. Sattar. Old resolution meets
modern SLS. In 20th AAAI, pages 354–359, Pittsburgh, PA, July 2005.
E. Aurell, U. Gordon, and S. Kirkpatrick. Comparing beliefs, surveys, and random
walks. In 17th NIPS, Vancouver, BC, Dec. 2004.
P. Beame, R. Karp, T. Pitassi, and M. Saks. On the Complexity of Unsatisfiability
Proofs for Random k-CNF Formulas. In 30th STOC, pages 561–571, Dallas,
TX, May 1998.
P. W. Beame and T. Pitassi. Simplified and improved resolution lower bounds.
In 37th FOCS, pages 274–282, Burlington, VT, Oct. 1996. IEEE.
B. Bollobás, C. Borgs, J. T. Chayes, J. H. Kim, and D. B. Wilson. The scaling
window of the 2-SAT transition. Random Struct. and Alg., 19(3-4):201–256,
2001.
A. Braunstein and R. Zecchina.
Survey propagation as local
equilibrium equations.
J. Stat. Mech., P06007, 2004.
URL
http://lanl.arXiv.org/cond-mat/0312483.
A. Broder, A. Frieze, and E. Upfal. On the satisfiability and maximum satisfiability of random 3-CNF formulas. In Proc., 4th SODA, Jan. 1993.
B. Cha and K. Iwama. Adding new clauses for faster local search. In 13th AAAI,
pages 332–337, Portland, OR, Aug. 1996.
P. Cheeseman, B. Kenefsky, and W. Taylor. Where the really hard problems are.
In Proceedings of IJCAI-91, pages 331–337. Morgan Kaufmann, 1991.
V. Chvátal and B. Reed. Mick gets some (the odds are on his side). In 33rd
FOCS, pages 620–627, Pittsburgh, PA, Oct. 1992. IEEE.
13
14
Bibliography
V. Chvátal and E. Szemerédi. Many hard examples for resolution. J. Assoc.
Comput. Mach., 35(4):759–768, 1988.
M. Clegg, J. Edmonds, and R. Impagliazzo. Using the Gröbner basis algorithm
to find proofs of unsatisfiability. In 28th STOC, pages 174–183, Philadelphia,
PA, May 1996.
S. Cook and D. Mitchell. Finding hard instances of the satisfiability problem:
a survey. In DIMACS Series in Discr. Math. and Theoretical Comp. Sci.,
volume 35, pages 1–17. American Math. Society, 1997.
J. Crawford and L. Auton. Experimental results on the cross-over point in satisfiability problems. In Proc. AAAI-93, pages 21–27, Washington, DC, 1993.
E. Dantsin, A. Goerdt, E. A. Hirsch, R. Kannan, J. M. Kleinberg, C. H. Papadimitriou, P. Raghavan, and U. Schöning. A deterministic (2 − 2/(k + 1)) n
algorithm for k-SAT based on local search. Theoretical Comput. Sci., 289(1):
69–83, 2002.
O. Dubois, Y. Boufkhad, and J. Mandler. Typical random 3-SAT formulae and
the satisfiability threshold. In Proc., 11th SODA, pages 126–127, San Francisco,
CA, Jan. 2000.
J. Franco. Probabilistic analysis of the pure literal heuristic for the satisfiability
problem. Annals of Operations Research, 1:273–289, 1983.
J. Franco and M. Paull. Probabilistic analysis of the Davis-Putnam procedure for
solving the satisfiability problem. Discr. Applied Mathematics, 5:77–87, 1983.
J. Frank. Learning short-term weights for GSAT. In 15th IJCAI, pages 384–391,
Nagoya, Japan, Aug. 1997.
J. Frank, P. Cheeseman, and J. Stutz. Where gravity fails: Local search topology.
JAIR, 7:249–281, 1997.
E. Friedgut. Sharp thresholds of graph properties, and the k-sat problem. Journal
of the American Mathematical Society, 12:1017–1054, 1999.
A. Frieze and S. Suen. Analysis of two simple heuristics on a random instance of
k-SAT. J. Alg., 20(2):312–355, 1996.
I. P. Gent and T. Walsh. Towards an understanding of hill-climbing procedures
for SAT. In 11th AAAI, pages 28–33, Washington, DC, July 1993.
M. L. Ginsberg and D. A. McAllester. GSAT and dynamic backtracking. In 4th
KR, pages 226–237, Bonn, Germany, May 1994.
A. Goldberg. On the complexity of the satisfiability problem. Technical Report
Report No. 16, Courant Computer Science, New York University, 1979.
C. P. Gomes and B. Selman. Can get satisfaction. Nature, 435:751–752, 2005.
J. Gu. Efficient local search for very large-scale satisfiability problems. Sigart
Bulletin, 3(1):8–12, 1992.
J. Gu, P. W. Purdom, J. Franco, and B. J. Wah. Algorithms for the Satisfiability
(SAT) Problem: A Survey. In Satisfiability (SAT) Problem, DIMACS, pages
19–151. American Mathematical Society, 1997.
D. Habet, C. M. Li, L. Devendeville, and M. Vasquez. A hybrid approach for SAT.
In 8th CP, volume 2470 of LNCS, pages 172–184, Ithaca, NY, Sept. 2002.
M. Hajiaghayi and G. Sorkin. The satisfiability threshold for random 3-SAT is
at least 3.52, 2003. URL http://arxiv.org/abs/math/0310193.
A. Haken. The intractability of resolution. Theoretical Comput. Sci., 39:297–305,
1985.
Bibliography
15
M. Heule and H. van Maaren. March dl: Adding adaptive heuristics and a new
branching strategy. J. Satisfiability, 2:47–59, 2006.
M. Heule, J. van Zwieten, M. Dufour, and H. van Maaren. March eq: Implementing additional reasoning into an efficient lookahead SAT solver. In 7th SAT,
volume 3542 of LNCS, pages 345–359, Vancouver, BC, May 2004.
E. A. Hirsch and A. Kojevnikov. UnitWalk: A new SAT solver that uses local
search guided by unit clause elimination. Annals Math. and AI, 43(1):91–111,
2005.
J. N. Hooker. A quantitative approach to logical inference. Decision Support
Systems, 4:45–69, 1988.
H. Hoos. On the run-time behaviour of stochastic local search algorithms for
SAT. In Proceedings of AAAI-99, pages 661–666. AAAI Press, 1999.
H. H. Hoos. An adaptive noise mechanism for WalkSAT. In 18th AAAI, pages
655–660, Edmonton, Canada, July 2002.
H. H. Hoos and T. Stützle. Stochastic Local Search: Foundations and Applications. Morgan Kaufmann, San Francisco, CA, 2004.
F. Hutter, D. A. D. Tompkins, and H. H. Hoos. Scaling and probabilistic smoothing: Efficient dynamic local search for SAT. In 8th CP, volume 2470 of LNCS,
pages 233–248, Ithaca, NY, Sept. 2002.
S. Janson, Y. C. Stamatiou, and M. Vamvakari. Bounding the unsatisfiability
threshold of random 3-SAT. Random Struct. and Alg., 17(2):103–116, 2000.
D. Johnson, C. Aragon, L. McGeoch, and C. Schevon. Optimization by simulated
annealing: an experimental evaluation; part II. Operations Research, 39, 1991.
D. S. Johnson and M. A. Trick, editors. Cliques, Coloring and Satisfiability: the
Second DIMACS Implementation Challenge, volume 26 of DIMACS Series in
DMTCS. Amer. Math. Soc., 1996.
A. Kamath, N. Karmarkar, K. Ramakrishnan, and M. Resende. Computational
experience with an interior point algorithm on the satisfiability problem. In
Proceedings of Integer Programming and Combinatorial Optimization, pages
333–349, Waterloo, Canada, 1990. Mathematical Programming Society.
A. C. Kaporis, L. M. Kirousis, and E. G. Lalas. The probabilistic analysis of
a greedy satisfiability algorithm. Random Structures and Algorithms, 28(4):
444–480, 2006.
S. Kirkpatrick, D. Gelatt Jr., and M. Vecchi. Optimization by simuleated annealing. Science, 220(4598):671–680, 1983.
S. Kirkpatrick and B. Selman. Critical behavior in the satisfiability of random
Boolean expressions. Science, 264:1297–1301, May 1994. Also p. 1249: ”Math.
Logic: Pinning Down a Trecherous Border in Logical Statements” by B. Cipra.
L. M. Kirousis, E. Kranakis, and D. Krizanc. Approximating the unsatisfiability
threshold of random formulas. In Proceedings of the Fourth Annual European
Symposium on Algorithms, pages 27–38, Barcelona, Spain, Sept. 1996.
K. Konolige. Easy to be hard: Difficult problems for greedy algorithms. In 4th
KR, pages 374–378, Bonn, Germany, May 1994.
L. Kroc, A. Sabharwal, and B. Selman. Survey propagation revisited. In 23rd
UAI, pages 217–226, Vancouver, BC, July 2007.
L. Kroc, A. Sabharwal, and B. Selman. Leveraging belief propagation, backtrack
search, and statistics for model counting. In 5th CPAIOR, volume 5015 of
16
Bibliography
LNCS, pages 127–141, Paris, France, May 2008.
F. Krzakala, A. Montanari, F. Ricci-Tersenghi, G. Semerjian, and L. Zdeborova.
Gibbs states and the set of solutions of random constraint satisfaction problems.
PNAS, 104(25):10318–10323, June 2007.
C. M. Li, W. Wei, and H. Zhang. Combining adaptive noise and look-ahead
in local search for SAT. In 10th SAT, volume 4501 of LNCS, pages 121–133,
Lisbon, Portugal, May 2007.
X. Y. Li, M. F. M. Stallmann, and F. Brglez. QingTing: A local search SAT
solver using an effective switching strategy and an efficient unit propagation.
In 6th SAT, pages 53–68, Santa Margherita, Italy, May 2003.
S. Lin and B. Kernighan. An efficient heuristic algorithm for the travelingsalesman problem. Operations Research, 21:498–516, 1973.
E. Maneva. Belief Propagation Algorithms for Constraint Satisfaction Problems.
PhD thesis, University of California, Berkeley, 2006.
E. Maneva, E. Mossel, and M. J. Wainwright. A new look at survey propagation
and its generalizations. J. Assoc. Comput. Mach., 54(4):17, July 2007.
E. Maneva and A. Sinclair. On the satisfiability threshold and survey propagation
for random 3-SAT, 2007. http://arxiv.org/abs/cs.CC/0609072.
B. Mazure, L. Sais, and E. Gregoire. Boosting complete techniques thanks to
local search methods. In Proc. Math and AI, 1996.
B. Mazure, L. Sais, and E. Grégoire. Tabu search for SAT. In 14th AAAI, pages
281–285, Providence, RI, July 1997.
D. A. McAllester, B. Selman, and H. Kautz. Evidence for invariants in local
search. In AAAI/IAAI, pages 321–326, Providence, RI, July 1997.
S. Mertens, M. Mézard, and R. Zecchina. Threshold values of random K-SAT
from the cavity method. Random Struct. and Alg., 28(3):340–373, 2006.
M. Mézard, T. Mora, and R. Zecchina. Clustering of solutions in the random
satisfiability problem. Phy. Rev. Lett., 94:197205, May 2005.
M. Mézard, G. Parisi, and R. Zecchina. Analytic and algorithmic solution of
random satisfiability problems. Science, 297(5582):812–815, 2002.
M. Mézard and R. Zecchina. Random k-satisfiability problem: From an analytic
solution to an efficient algorithm. Phy. Rev. E, 66:056126, Nov. 2002.
S. Minton, M. Johnston, A. Philips, and P. Laird. Solving large-scale constraint
satisfaction an scheduling problems using a heuristic repair method. In Proceedings AAAI-90, pages 17–24. AAAI Press, 1990.
D. Mitchell, B. Selman, and H. Levesque. Hard and easy distributions of SAT
problems. In Proc. AAAI-92, pages 459–465, San Jose, CA, 1992.
R. Monasson, R. Zecchina, S. Kirkpatrick, B. Selman, and L. Troyansky. Determining computational complexity from characteristic phase transitions. Nature,
400(8):133–137, 1999.
P. Morris. The breakout method for escaping from local minima. In 11th AAAI,
pages 428–433, Washington, DC, July 1993.
C. Papadimitriou and K. Steiglitz. Combinatorial Optimization. Prentice-Hall,
Inc., 1982.
C. H. Papadimitriou. On selecting a satisfying truth assignment. In 32nd FOCS,
pages 163–169, San Juan, Puerto Rico, Oct. 1991. IEEE.
A. J. Parkes and J. P. Walser. Tuning local search for satisfiability testing. In
Bibliography
17
13th AAAI, pages 356–362, Portland, OR, Aug. 1996.
J. Pearl. Probabilistic Reasoning in Intelligent Systems: Networks of Plausible
Inference. Morgan Kaufmann, 1988.
D. N. Pham, J. Thornton, and A. Sattar. Building structure into local search for
SAT. In 20th IJCAI, pages 2359–2364, Hyderabad, India, Jan. 2007.
S. D. Prestwich. Local search and backtracking vs non-systematic backtracking.
In AAAI 2001 Fall Symp. on Using Uncertainty within Computation, 2001.
S. D. Prestwich. Variable dependency in local search: Prevention is better than
cure. In 10th SAT, Lisbon, Portugal, May 2007.
P. W. Purdom Jr. and C. A. Brown. Polynomial average-time satisfiability problems. Information Science, 41:23–42, 1987.
M. G. C. Resende and T. A. Feo. A GRASP for satisfiability. In Johnson and Trick
[1996], pages 499–520.
I. Rish and R. Dechter. To guess or to think? hybrid algorithms for SAT. In Proc.
Conference on Principles of Constraint Programming (CP-96), pages 555–556,
1996.
U. Schöning. A probabilistic algorithm for k-SAT and constraint satisfaction
problems. In 40th FOCS, pages 410–414, New York, NY, Oct. 1999. IEEE.
U. Schöning. A probabilistic algorithm for k-SAT based on limited local search
and restart. Algorithmica, 32(4):615–623, 2002.
D. Schuurmans and F. Southey. Local search characteristics of incomplete SAT
procedures. AI J., 132(2):121–150, 2001.
D. Schuurmans, F. Southey, and R. C. Holte. The exponentiated subgradient
algorithm for heuristic boolean programming. In 17th IJCAI, pages 334–341,
Seattle, WA, Aug. 2001.
S. Seitz, M. Alava, and P. Orponen. Focused local search for random 3satisfiability. J. Stat. Mech., P06006, 2005.
B. Selman and H. Kautz. Domain-independent extensions to GSAT: Solving large
structured satisfiability problems. In 13th IJCAI, pages 290–295, France, 1993.
B. Selman, H. Kautz, and B. Cohen. Noise strategies for local search. In Proc.
AAAI-94, pages 337–343, Seattle, WA, 1994.
B. Selman, H. Kautz, and B. Cohen. Local search strategies for satisfiability
testing. In Johnson and Trick [1996], pages 521–532.
B. Selman, H. J. Levesque, and D. G. Mitchell. A new method for solving hard
satisfiability problems. In 10th AAAI, pages 440–446, San Jose, CA, July 1992.
Y. Shang and B. W. Wah. A discrete Lagrangian-based global-search method for
solving satisfiability problems. J. of Global Optimization, 12(1):61–99, 1998.
W. M. Spears. Simulated annealing for hard satisfiability problems. In
Johnson and Trick [1996], pages 533–558.
J. Thornton, D. N. Pham, S. Bain, and V. Ferreira Jr. Additive versus multiplicative clause weighting for SAT. In 19th AAAI, pages 191–196, San Jose,
CA, July 2004.
Z. Wu and B. W. Wah. Trap escaping strategies in discrete Lagrangian methods
for solving hard satisfiability and maximum satisfiability problems. In 16th
AAAI, pages 673–678, Orlando, FL, July 1999.
Z. Wu and B. W. Wah. An efficient global-search strategy in discrete Lagrangian
methods for solving hard satisfiability problems. In 17th AAAI, pages 310–315,
18
Bibliography
Austin, TX, July 2000.
L. Zdeborova and F. Krzakala. Phase transition in the coloring of random graphs.
Phy. Rev. E, 76:031131, Sept. 2007.
Index
belief propagation, 12
BP, see belief propagation
break count, 4
random k-SAT, 9
random walk, 2
satisfiability algorithms
incomplete, 1
satisfiability threshold, see threshold
search
greedy, 3
local, 1
SLS, see stochastic local search
SP, see survey propagation
statistical physics, 10, 11
stochastic local search, see local search
survey propagation, 11
cavity method, 11
clause re-weighting, see clause weighting
clause weighting, 5, 6
cover, 12
discrete Lagrangian method, 6
DLM, see discrete Lagrangian method
finite-size scaling, 10
focused random walk, 2
threshold, 9
Lagrangian method, see discrete Lagrangian method
landscape, 2
local search, 1
GSAT, 3
UnitWalk, 4
Walksat, 4
weights, 5
MAX-SAT, 2
move
freebie, 4
greedy, 4
random walk, 4
sideways, 3
uphill, 4
phase transition, 9
plateau, 3
random problems
random 2-SAT, 9
random 3-SAT, 9
19